風力機偏航系統控制策略研究現狀及進展
2021-07-03 09:27:12張磊李繼影李欽偉張敏策郭云豐張立棟
發電技術 2021年3期
張磊,李繼影,李欽偉,張敏策,郭云豐,張立棟*
(1.中國大唐集團新能源科學技術研究院有限公司,北京市 石景山區 100040;2.中廣核新能源遼寧分公司,遼寧省 沈陽市 110015;3.中國電建集團吉林省電力勘測設計研究院有限公司,吉林省 長春市 130022;4.內蒙古大唐國際新能源有限公司,內蒙古自治區 呼和浩特市 010050;5.東北電力大學能源與動力工程學院,吉林省 吉林市 132012)
0 引言
風能近20年有著長足的發展,作為清潔能源的主要來源[1],風力機單機容量逐漸增大,目前國內已開展8 MW和10 MW海上風電試驗樣機的制造工作。
由于風電出力的不確定性對電力系統穩定運行有較大影響[2-5],因此風力機主動偏航系統是大型兆瓦級風力發電機組提高風能利用率及保障機組安全的重要執行機構[6]。若風力機偏航控制系統及執行機構隨風向變化而頻繁動作,將會縮短偏航機構壽命,嚴重時會導致偏航系統失效,風力發電機組安全受到影響。隨著棄風電量逐年降低,風力發電設備運行小時數也相應增加,風力發電機組設備故障率也隨之提高。
為了保障機組的安全穩定運行,需要對風力機進行單機控制以滿足風電場有功功率控制[7-9]。風力發電機組偏航控制應根據不同的風況,調整其自身的控制策略。本文整理總結了偏航控制研究現狀及偏航控制策略,分析目前應用情況及存在的問題,指出控制策略的發展方向,可為優化風力機偏航控制提供借鑒。
1 風力機偏航系統控制現狀
據統計,偏航系統故障發生頻次為年均0.11次/臺,平均排除故障耗時50.54 h[10]。偏航系統是風力機調整機艙位置的主動控制方法,安全可靠的偏航機構能有效提高發電效率[11]。因此,增強對風力機偏航系統有效控制,對減小偏航故障發生概率具有較強現實意義。
風力機偏航控制依據風力機數據采集與監視控制系統(supervisory control and data acquisition,SCADA)監測數據對偏航系統的偏航方向及偏航速率進行控制[12],由于偏航策略不同,導致偏航次數、偏航方向及偏航速率等都不同。偏航系統具有3種基本功能,即90°側風、解纜、自動對風。90°側風是指當風力機需要進行功率及轉速控制時,利用偏航系統使風力機不對風,進而使風力機轉速及功率快速下降;解纜是指當電纜隨風力發電機的轉動產生扭轉現象時,若不及時解纜,將產生故障停機;風力機偏航系統的自動對風是指使風力發電機組始終處于迎風狀態,使風力機能充分利用風能,提高風力發電機組的發電效率。風力機自動偏航是目前研究熱點問題。
自動偏航過程是根據風力機空氣動力學貝茲理論獲得,風力機獲得功率[13]為

式中:P為風力機發電功率;Cp為風力機功率系數;λ為葉尖速比;β為槳距角;ρ為空氣密度;S為風力機掃風面積;v為測風塔風速;θ為偏航誤差。
目前兆瓦級的風力機偏航控制仍然采用傳統的偏航控制方法[14]。偏航控制系統根據偏航角誤差及偏航延時時間,共同控制偏航速率,即控制公式(1)中θ使風力機發電功率達到最大。
2 風力機偏航基本控制策略
2.1 風力機偏航控制分類
風力機偏航控制可以分為偏航執行控制和偏航重啟控制[13,15],風力機偏航控制原理如圖1所示。偏航執行控制是通過控制偏航電機執行策略,減少風向與機艙角度的偏差,主要控制偏航電機轉速及偏航延時時間;偏航重啟控制是對風系統只有當風況變化滿足風力機預先設定的條件時才能重新啟動偏航系統。
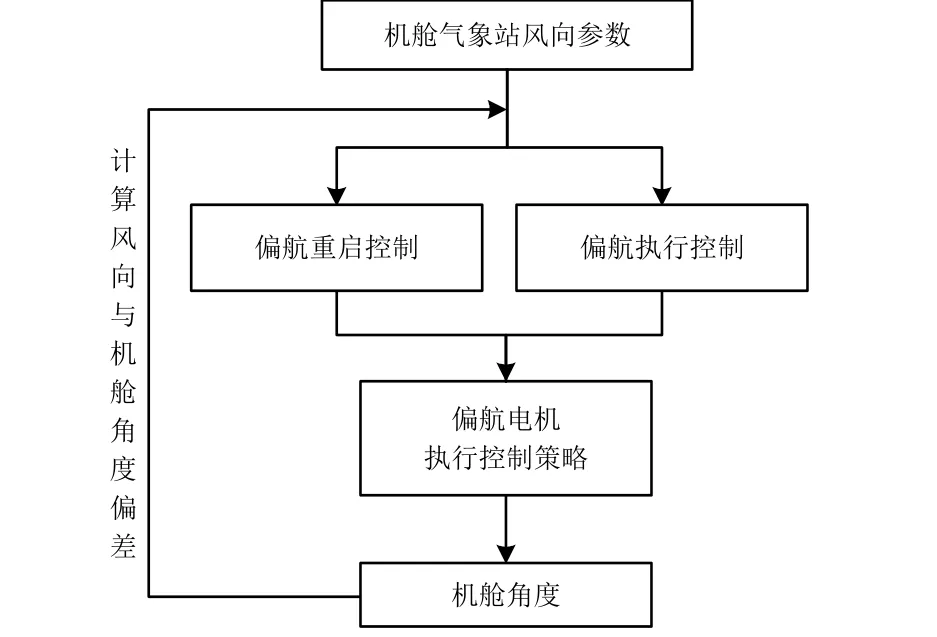
圖1 偏航控制原理Fig. 1 Principle of Yaw control
2.2 風力機偏航執行策略
沈小軍等[16]總結了風力發電機組對風策略及偏航系統執行對風策略,采用爬山算法[17]、V-HC(Vane-hill climbing)算法[18]、KHC 算法(Kalman and hill climbing)[19-20]、改進的隨機粒子群算法[21]、模糊控制算法[22]等偏航系統控制策略,在一定程度上提高了風力發電機組的捕風性能。由于風向的精度對風力機偏航過程有重要作用,近年來基于風向預測的風力機偏航控制算法受到較多學者關注。風向對于功率來說也是較為重要的參數,風力機偏航系統先由風力機的風向標傳感器采集風向變化的數據,再由偏航控制器執行該偏航動作需求。多數學者都是基于風力機SCADA歷史數據進行風向預測及相應的偏航優化控制算法的設計,如表1所示。
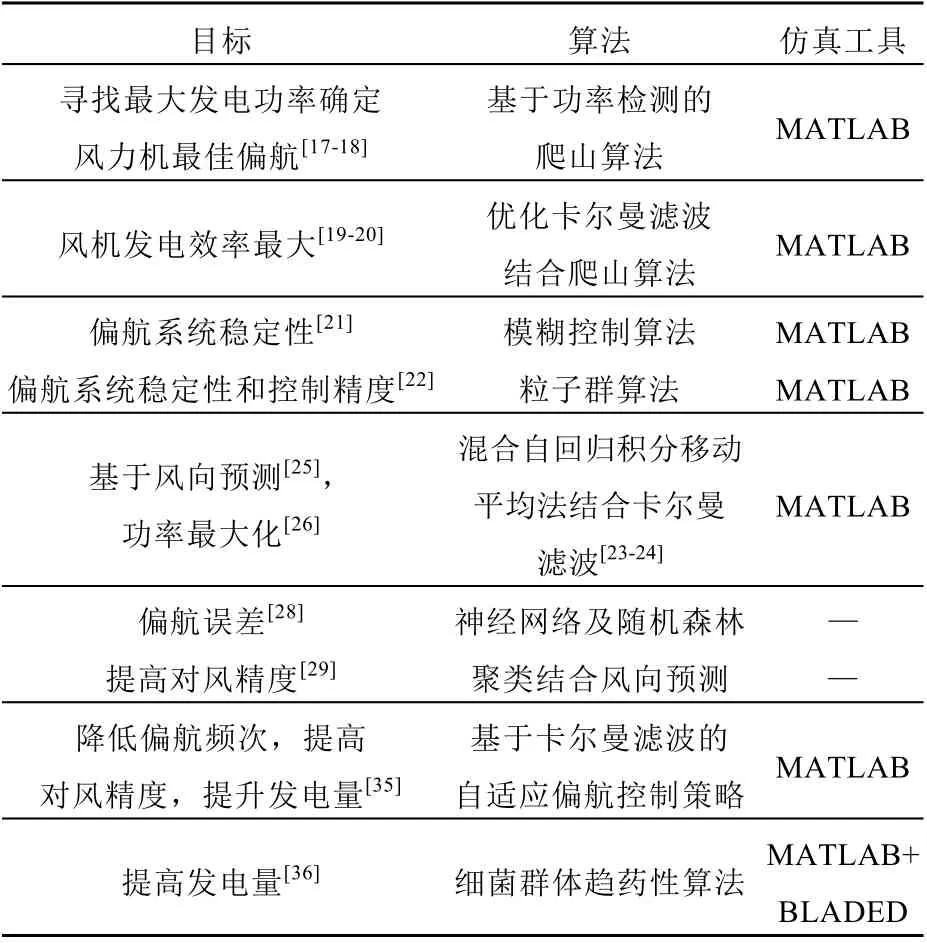
表1 風力機偏航執行策略控制仿真算法Tab. 1 Simulation algorithms of yaw execution strategy control of wind turbine
楊茂等[23]提出了一種考慮風向因素的基于Copula 理論的風電功率不確定性預測方法,增加風向因素后顯著提高了風電功率的預測結果。隨著算法改進,風向預測[24-25]及偏航誤差預測[26-28]精度提高,為風力發電機組偏航控制提供更精確的模型參考。Song等[26]采用風向預測對風力發電機組的偏航系統進行控制,以使風力發電機組得到最大功率輸出。許炳坤[29]采用聚類算法和風向預測相結合的偏航策略,提高了對風精度。
由于風向對風力機尾流也有較大影響[30],因此,基于風力機SCADA數據對風向進行矯正也非常重要[31]。可采用風速風向聯合概率密度函數進行建模,同時分析4個季節風功率密度[32]。Ahmad等[33]利用優化偏航上游風力發電機來減少尾流效應,從而增加風電場發電的潛力。Dar等[34]利用偏航角和尾流偏轉優化了Park和Jensen尾流模型,研究了誘導因子和偏航角的最佳值,使風力機在一個風電場中實現最大的總功率。
近些年,學者們對偏航系統優化和風力機其他設備(如變槳系統)的槳距角相結合的控制算法也逐漸開展了相關的研究[35-40]。Wen等[41]對海上漂浮式風力機的動態偏航過程中槳距角變化規律進行研究。Liao等[42]通過考慮風力機氣動彈性特性和控制系統的影響對轉子轉速、風速、俯仰角、偏航角、方位角等參數變量進行研究,得到了約束條件,提出了一種改進的粒子群優化算法,對風力機載荷進行詳細的分析。王欣等[43]通過分析風誤差隨風速的變化趨勢,建立了不同風速段的偏航優化控制策略,以提升風力機發電量。
2.3 風力機偏航重啟策略
陳思等[13]研究了偏航重啟控制相關參數,建立偏航誤差角度和偏航誤差持續時間之間的關系,當偏航誤差持續時間達到限定值時,觸發偏航指令,按照預定的偏航速率(0.5°/s)進行偏航。
路宏[14]分析的工況是不同偏航延時時間從60~600 s以60 s間隔的6種限定值,偏航角閾值從4°~12°間隔為2°,從15°~25°間隔為5°,得出了2種參數下風力機功率損失率、偏航次數。根據分析的結果,以額定風速為界重新設計了不同風速區間下的偏航重啟控制方案,給出了偏航角閾值、偏航持續時間、偏航次數的具體數值。
劉航[15]采用激光雷達對運達風電的風力機進行偏航重啟策略的仿真研究,通過將風速進行分段控制,基于激光雷達的測量提前預測風向與機艙位置的偏差,達到閾值后進行偏航動作。
2.4 偏航控制系統研究現狀
風電機組運維及機組提質增效是風電企業面臨的重要問題,偏航優化有效決策能有效提高風電場整場功率[44]。但偏航控制系統目前都是沿用風力發電機組廠家的控制體系,針對偏航控制主要采用仿真研究,并未見到公開實際的案例。
近年來,研究轉向風力機偏航系統結合風電場尾流效應,提高風電場整場功率的偏航控制算法。吳亞聯等[45]根據風電場風力機SCADA數據對整場控制優化,對25臺總容量為125 MW的風力機進行偏航優化,提高風電場發電功率。Majid等[46]通過實驗研究發現:與完全無偏航條件相比,偏航角控制可使風電場的整體效率提高17%。但風電場整場的偏航優化仍未看到有大量的使用,后期可以針對風電場偏航控制算法的普適性及可靠性加以深入研究。Kuo等[47]采用隨機搜索算法分析了39臺風力機的偏航角優化過程,結果表明:隨著風電場風機數量增加,偏航優化對風電場功率提升效果潛力顯著增加。
大數據技術近年來在風力發電領域有較廣泛應用[48-49],Malik[50]采用小波變換、希爾伯特黃變換(Hilbert-Huang transform,HHT)和臨近算法(K-nearest neighbor,KNN) 3種算法對風力機偏航故障及其健康狀態進行分析。McKay等[51]對風電場風機SCADA數據采用組合靈敏度考慮多個變量相互的影響,因素包括槳距、偏航位置、主軸承和環境溫度以及風速和偏航位置標準偏差,進而檢測偏航等風力機子系統的健康狀態。陳思等[13]采用粒子群和遺傳算法相結合,優化風電場壽命周期中綜合經濟效益。高鑫[52]依據風力機運行數據相關性分析功率曲線和偏航誤差的關系,推斷風力機振動數據。
3 結論
偏航系統具有主動對風功能,對于提高整個風電機組風能的利用率具有十分重要的意義。偏航系統故障會不同程度地影響到風能的捕獲,但若能控制較好,還能提高風電場整場發電量。通過整理近幾年國內外的相關文獻,對風力機控制策略現狀及進行了詳細總結。但偏航系統優化后應用于實際風力機和風電場中的研究鮮見報道,偏航系統控制策略主要用于控制單風力機的偏航角,以使風力機達到精準對風。若能將風向、風速和風功率同時預測控制相結合,對風電場中全體風力機進行協同偏航控制,則可以減少風力機偏航故障的同時使風電場全場功率大幅提升。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
電機與控制應用(2021年12期)2021-02-28 07:55:52
能源工程(2020年6期)2021-01-26 00:55:22
海洋通報(2020年5期)2021-01-14 09:26:54
北京測繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
西南交通大學學報(2016年4期)2016-06-15 20:29:37