手扶式三岔條帶中耕施肥機的設計與仿真
2021-07-03 02:51:06劉宇軒高志勇頓國強毛寧魏斌鄭琛達
農業裝備與車輛工程 2021年6期
關鍵詞:作業
劉宇軒,高志勇,頓國強,毛寧,魏斌,鄭琛達
(1.150040 黑龍江省 哈爾濱市 東北林業大學 機電工程學院;2.150040 黑龍江省 哈爾濱市 東北林業大學 工程技術學院)
0 引言
中耕施肥是農作物豐收的重要保障,不均勻施肥會影響農作物根系的養分吸收,造成作物生長不均減產的現象,不利于精準農業可持續發展[1]。目前,壟間施肥多采用條施或穴施,這種施肥方法肥料集中,肥料作用范圍小,不易被作物吸收利用,大大降低了肥效并造成浪費[2]。
國內對中耕機械的研究主要針對集深松、施肥、除草、培土等多項作業為一體的大型機械,少有小型中耕施肥機械的研究。楊洲[3]等針對香蕉根系的分布特征進行統計分析,獲得了基于根系分布特征的施肥決策;李明金[4]等設計了寬幅動力式中耕施肥機,填補了玉米大壟雙行動力式中耕施肥機械的空白;孫鵬[5]等針對丘陵地形復雜的特點,在傳統中耕機的基礎上對馬鈴薯中耕機進行改進設計,降低了必要勞動時間。目前,國內施肥機器主要包括依靠重力自然下落式施肥機和依靠離心力撒播式施肥機。依靠重力自然下落式施肥機連接在排肥器下方,僅依靠一根管道輸送肥料,下落肥料呈一條直線,肥料作用面積小。依靠離心力撒播式施肥機需要外部額外動力源,能源消耗大。此外,雖然此撒播方式的肥料為一扇形面,但是由于肥料顆粒的排出量不穩定造成離心作用效果不同,造成肥料分布不均勻。
針對上述問題,本文設計了針對壟作作物的三岔條帶中耕施肥機,可將肥料沿壟側到壟溝方向以逐漸增多的方式進行施肥作業,以保證作物正常生長的養分需要,并利用EDEM 對施肥作業過程進行仿真,驗證機器的作業性能,以期為小型中耕施肥機的設計和應用提供參考。
1 施肥機的結構與原理
手扶式三岔條帶中耕施肥機由機架、地輪、扶手、排肥器、三岔條帶排肥管、傳動鏈條等組成,如圖1 所示。整機采用手扶式機構,工作時,由人工手扶機器沿壟溝方向前進,前地輪旋轉通過傳動鏈條帶動間隙嚙合排肥齒輪旋轉,將肥箱里的肥料排出,并由三岔排肥管的二次分流裝置將肥料撒播到壟兩側和壟底,撒播的肥料集線成面,保證中耕后作物生長的肥料需求。

圖1 手扶式三岔條帶中耕施肥機整機結構與原理Fig.1 Structure and principle of walk-behind threechamber strip cultivating fertilizer applicator
1.1 排肥器的結構與原理
間隙嚙合齒輪排肥器[6]由肥盒、間隙嚙合排肥齒輪、擋肥板等構成。其中,間隙嚙合排肥齒輪是排肥器的關鍵零件。
排肥器的工作原理如圖2 所示。在傳動齒輪軸的帶動下,兩個間隙嚙合排肥齒輪向內部轉動,肥箱下部的肥料隨排肥輪轉動并隨著齒脊與齒槽間形成的容肥空間向下運動,落入排肥口,由于間隙嚙合排肥齒輪的齒脊與齒槽連續交替嚙合作用,排肥齒輪嚙合的容肥空間大小基本不變,肥料顆粒連續穩定地排出,提高了排肥流量的均勻性,避免了外槽輪式排肥器的間歇性排肥的問題。
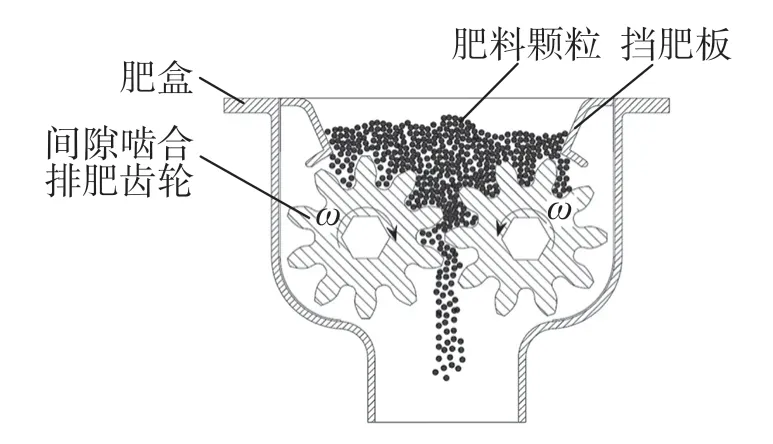
圖2 間隙嚙合齒輪排肥器Fig.2 Clearance meshing gear fertilizer distributor
1.2 三岔條帶排肥管的結構與原理
三岔條帶排肥管主要包括圓形漏斗、上圓柱肥管、分肥圓錐、下三岔圓柱管和帶有分肥棱錐的分肥小板,如圖3 所示。
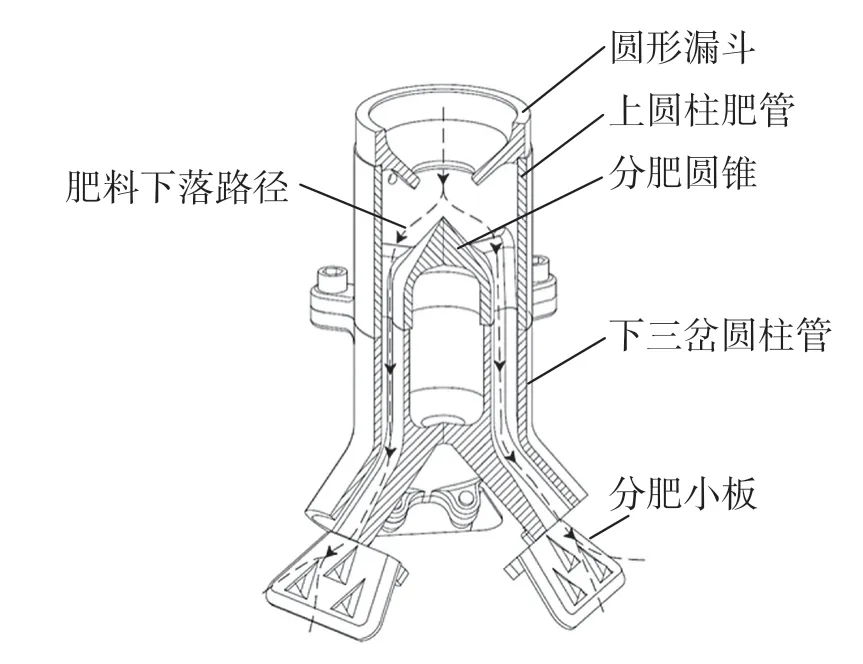
圖3 三岔條帶排肥管的結構Fig.3 Structure of three-chamber strip fertilizer pipe
排肥管作業時,肥料由于重力下落,經過圓形漏斗收集作用的肥料均勻地被分肥圓錐分配到3 個呈120°圓周均勻分布的上排肥管道中;肥料經上排肥管道和下排肥管道落到分肥小板上;肥料經過分肥小板上的3 個分肥棱錐再次分開,每個管道下落的肥料經過二次分流;兩側管道下落的肥料分別落在兩壟側,保證作物前期的肥料需求;中間管道下落的肥料落在壟溝底部,保證了作物后期的肥料需求。整個壟側及壟溝均勻撒施肥料,在施肥機帶動三岔條帶排肥管的勻速直線運動中,肥料撒播集線成面,實現其增大施肥面積及提高肥料分布均勻性的目的。
如圖4 所示,不考慮三岔條帶排肥管的移動(即作業速度為0)時,由于重力作用肥料經過傾角為θ的分肥小板后做拋物線運動,取其中一個肥料顆粒1 分析:設肥料顆粒剛滑出分肥小板時離地面高度為h,瞬時速度為v,將v 分解為水平速度vx和豎直速度vy,由幾何關系可知


圖4 三岔條帶排肥管排肥原理Fig.4 Principle of fertilization with three-chamber strip fertilizer pipe
不考慮各種阻力,肥料顆粒將在水平方向作速度為vx的勻速直線運動,在豎直方向作初速度為vy,加速度為g 的勻加速直線運動,從而有
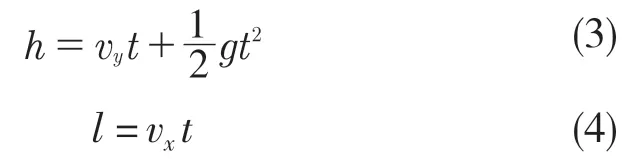
結合式(1)-式(4),消去t,得到肥料顆粒的水平分位移為

式中:v——肥料顆粒剛滑出分肥小板時的瞬時速度,m/s;θ——分肥小板與水平方向所成的傾角,°;h——肥料顆粒剛滑出分肥小板時離地面的高度,m;l——肥料顆粒剛滑出分肥小板時到落地的水平位移,m;t——肥料顆粒剛滑出分肥小板到落到地面的總時間,s;g——重力加速度,m/s2。
由式(5)可知,肥料顆粒剛滑出分肥小板時到落地的水平位移與肥料顆粒剛滑出分肥小板時的瞬時速度v、分肥小板與水平方向所成的傾角θ、肥料顆粒剛滑出分肥小板時離地面的高度h 有關,而因素θ和h 都是安裝參數,由于肥料顆粒的大小不同,在分肥小板滑動的時間不同,導致肥料顆粒剛滑出分肥小板時的瞬時速度v 不盡相同,從而形成不同水平位移的肥料作用線,施肥機工作時,帶動肥料撒播成面,從3 個呈120°分布的下排肥管道落出的肥料撒播成面,從而實現設計要求。
2 施肥作業過程的仿真
為驗證所設計的三岔條帶排肥管的作業性能,模擬實際狀態下的施肥作業,采用離散元仿真軟件EDEM(Engineering Discrete Element Method)進行施肥作業過程的仿真,其可以有效模擬實際施肥作業過程,評價其作業性能,加快施肥機械的研發進度。
2.1 離散元模型的建立與仿真
由于肥料顆粒間沒有粘結力且流動性好,采用Hertz-Mindlin (no slip)模型作為仿真的接觸模型[7]。從尿素化肥中隨機抽取100 粒,經統計計算,單粒尿素等效直徑為2.54 mm,密度為1 283 g/mm3。在EDEM 顆粒工廠中,設置Particle 平均半徑為1.27 mm。本研究選用球形顆粒模擬田間土壤顆粒,EDEM 仿真中顆粒數目的增加和尺寸的減小會導致仿真耗時和存儲空間呈幾何級數增加,故仿真中的顆粒尺寸受計算時間和存儲空間的限制,總是比真實土壤尺寸大[8]。本研究選取土壤顆粒半徑5 mm,符合仿真試驗要求。
其他參數如顆粒屬性參數和接觸參數[9-12]如表1 所示。
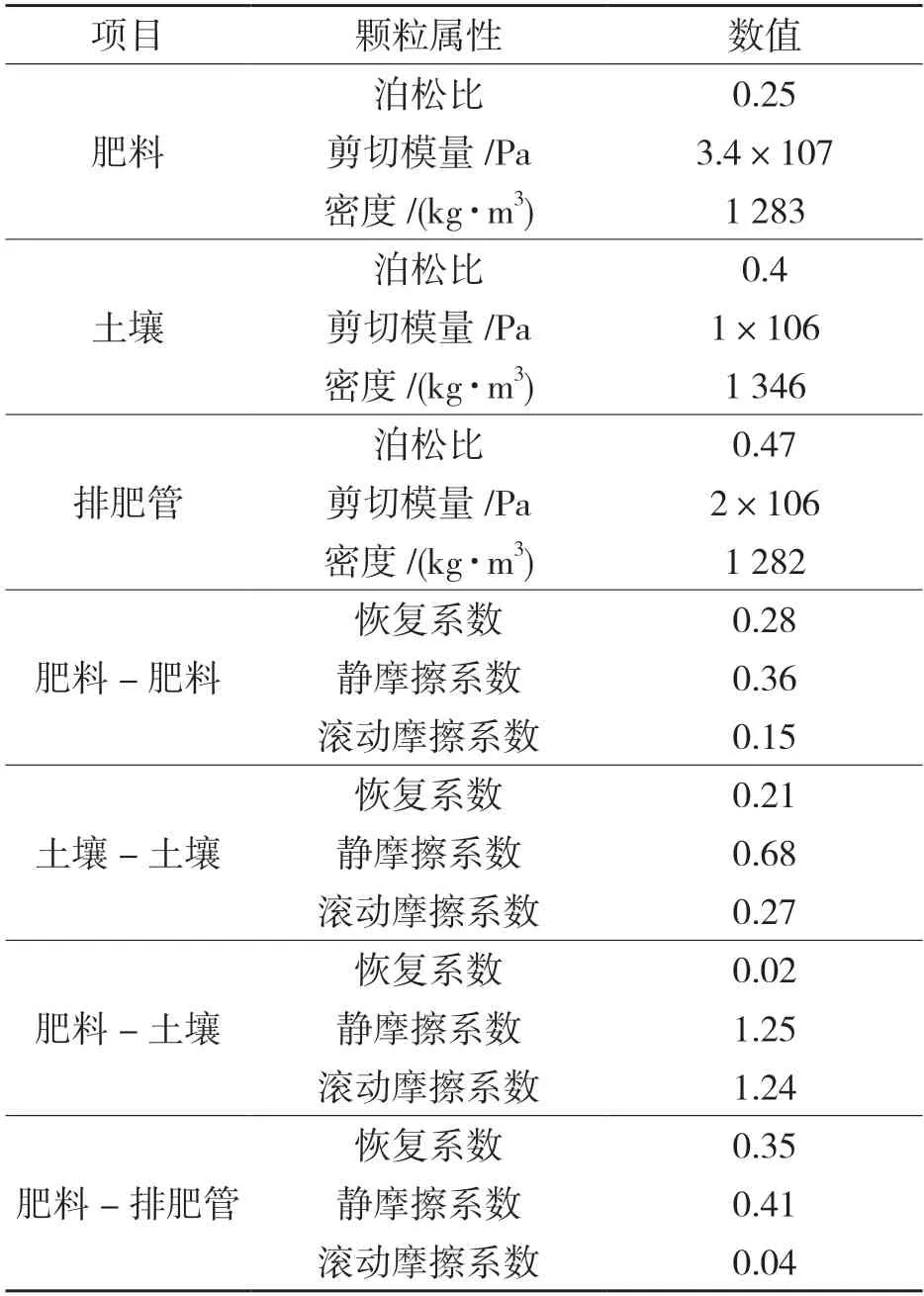
表1 EDEM 仿真中的變量參數設置Tab.1 Variable parameter setting in EDEM simulation
使用SolidWorks 進行三岔條帶排肥管三維模型的建立。根據壟作作物玉米實際的耕種方式,建立梯形田壟土壤床[13],壟距為60 cm,株距為25 cm。在EDEM 中導入三維模型文件,并進行模型零件參數設置。為三岔條帶排肥管設置前進速度0.5 m/s 模擬手扶施肥機的前進速度,此外為獲得肥料分布數據,在排肥管作業區域設置125 mm×75 mm×530 mm(長×寬×高)的檢測網格96 個,仿真示意如圖5 所示。

圖5 EDEM 仿真示意圖Fig.5 EDEM simulation diagram
2.2 施肥作業效果及分析
為監測排肥作業的穩定性和分布均勻性,在EDEM 后處理中導出X 范圍為0~600 mm,Y 范圍為0~750 mm,共48 個網格中肥料顆粒的坐標位置分布,如圖6 所示。選取壟側(X=75~225 mm和X=375~525 mm)和壟底(X=225~375 mm)部分網格內顆粒數量,計算Y 軸方向肥料顆粒數量分布變異系數,如表2 所示。經過計算,Y 軸方向的顆粒肥料數量分布平均變異系數為0.077,滿足設計要求。

圖6 肥料顆粒坐標圖Fig.6 Fertilizer particles plots

表2 壟側和壟溝部分Y 軸方向肥料顆粒數量分布Tab.2 Distribution of fertilizer particles in Y-axis direction of ridge side and ditch part
由圖6 和表2 可以看出,壟頂植株根系(X=0~75 mm 和X=525~600 mm)處肥料顆粒數量幾乎為0,避免了苗幼期燒苗現象。壟溝兩側(X=75~225 mm 和X=375~525 mm)處和壟溝底部(X=225~375 mm)處在Y軸方向(機器前進方向)上均勻分布,避免了作物生長不均導致的減產。在X 軸方向呈現壟溝兩側少、壟溝底部多的分布趨勢,肥料數量近似呈拋物線狀分布,與實際情況相符。壟側肥料較少,可以滿足中耕后拔苗期的養分需求,壟底肥料較多,可以滿足中耕后根系生長和開花期的養分需求。
3 結論
(1)設計了一種手扶式三岔條帶中耕施肥機,采用間隙嚙合圓弧齒輪排肥器和三岔條帶排肥管,進一步提高了從排肥到落肥過程中肥料分布的均勻性。
(2)利用EDEM 進行三岔條帶排肥管的排肥作業仿真,通過檢測網格輸出肥料顆粒位置分布和數量分布,結果顯示:壟頂植株根系處肥料顆粒數量幾乎為0,壟溝兩側處和壟溝底部處在Y 軸方向上均勻分布,分布變異系數平均值為0.077;在X 軸方向呈現壟溝兩側少、壟溝底部多的分布趨勢,可滿足中耕后作物生長的養分需求。
(3)EDEM 仿真結果符合實際施肥情況,利用離散元法來模擬施肥作業是可靠的。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08