基于BIM技術(shù)的水口大壩安全施工可視化監(jiān)測方法
2021-07-03 02:48:08蘇海濤
水利科學(xué)與寒區(qū)工程 2021年3期
蘇海濤
(貴州省水利水電勘測設(shè)計研究院有限公司,貴州 貴陽 550002)
大壩是水利水電工程中基礎(chǔ)的組成部分,大壩處承受著數(shù)值較大的水壓,水利工程規(guī)模不斷擴(kuò)大過程中,安全施工逐漸成為研究重點。水口大壩結(jié)構(gòu)較為復(fù)雜,涉及多個施工環(huán)節(jié)、多個施工線路以及多個工種,在施工環(huán)境的影響下,施工過程存在多種不穩(wěn)定因素[1-3],為此,在BIM技術(shù)的支持下,構(gòu)建一種大壩安全施工可視化監(jiān)測方法。可視化監(jiān)測過程需要強大的數(shù)字化技術(shù)作為支撐,國外研究人員最早在建筑工程施工過程中構(gòu)建了可視化監(jiān)測方法,將施工過程劃分為不同的管理階段[4],根據(jù)不同施工階段的特性,設(shè)定不同監(jiān)測側(cè)重點的監(jiān)測過程。國內(nèi)研究可視化監(jiān)測起步較晚,多數(shù)學(xué)者的研究成果只停留在理論層面上,在實際工程的應(yīng)用上還存在一定的空白[5]。在可視化監(jiān)控方法的控制下,能夠以一種直觀的方式觀察計算施工過程的各項參數(shù),保證施工活動的安全。
1 基于BIM技術(shù)的水口大壩安全施工可視化監(jiān)測方法
1.1 利用BIM技術(shù)構(gòu)建水口大壩施工模型
在利用BIM技術(shù)構(gòu)建水口大壩施工模型時,將大壩建筑設(shè)計階段涉及的各項數(shù)據(jù)整合為一個項目樣板文件,設(shè)置基礎(chǔ)的安全參數(shù)后,建立水口大壩的模型族庫,采用一個共用的基礎(chǔ)坐標(biāo)不斷組合模型族庫后,建立一個以族庫為組成的大壩施工模型,采用三角測量方法確定施工模型中的測量點[6-7],構(gòu)建得到的三角測量過程如圖1所示。
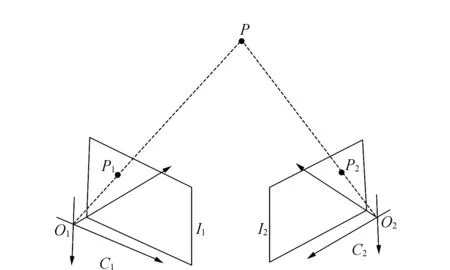
圖1 構(gòu)建的模型測量過程
圖1所示的參數(shù)測量過程下,以P為測量的視覺中心,P1,P2為模型面上的測點,C1,C2作為測點所在面的施工方向,O1,O2為施工模型的施工起點,I1,I2為施工模型監(jiān)測路徑。以圖1構(gòu)建的測量過程為基準(zhǔn),首先I1,I2作為施工側(cè)端,構(gòu)建一個側(cè)端投影數(shù)值計算過程:
δi=L·sinθi
(1)
式中:δi為第i側(cè)端的水平投影,L為模型測量段的長度,θi為模型測量段與水平方向間的夾角。不斷累積模型各個側(cè)端的投影數(shù)值,可根據(jù)式(2)計算得到:
(2)
式中:ΔL為累積得到的各個側(cè)端投影數(shù)值;其他各項參數(shù)含義不變。根據(jù)積累得到的側(cè)端數(shù)值,構(gòu)建一個施工進(jìn)度的觀測過程如式(3):
(3)
式中:α為側(cè)端變化系數(shù);ξ為工程影響量;ΔT為大壩的施工周期;其余參數(shù)含義不變。以施工進(jìn)度作為構(gòu)建模型的變化數(shù)值,考慮水口大壩施工過程中受到的外部環(huán)境影響[8-9],將外部影響因素與施工進(jìn)度進(jìn)行聯(lián)合,實際施工進(jìn)度就可表示為式(4):
(4)
式中:P0為不考慮環(huán)境因素下的施工項目進(jìn)度,其余參數(shù)含義不變。
綜合上述構(gòu)建的水口大壩模型以及計算得到的施工進(jìn)度,構(gòu)建可視化轉(zhuǎn)化方程。
1.2 構(gòu)建可視化轉(zhuǎn)化方程
構(gòu)建模型可視化轉(zhuǎn)化方程時,在可控制的測量范圍內(nèi)設(shè)置一個自由設(shè)站[10],以上述計算得到的施工進(jìn)度觀測數(shù)值為基礎(chǔ),根據(jù)間接平差原理,計算觀測數(shù)值的誤差,可表示為式(5):
(5)
式中:dX為設(shè)置的自由站點坐標(biāo);B為上述計算公式(4)中的觀測數(shù)值之和。根據(jù)最小二乘法處理得到未知觀測數(shù)值的未知向量,可表示為式(6):
(6)
式中:P1為施工模型的第一階段施工進(jìn)度數(shù)值;T為施工周期;其余參數(shù)含義不變。平差處理上述得到的未知向量,單位施工進(jìn)度產(chǎn)生的誤差σ0就可表示為式(7):
(7)
式中:r為施工模型的施工精度,其余參數(shù)含義不變。在上述單位施工進(jìn)度單位誤差的控制下,構(gòu)建一個以x、y、z為軸向的空間施工進(jìn)度過程[11-12],可表示為式(8):
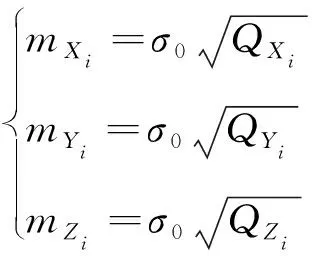
(8)
式中:mXi、mYi、mZi為施工進(jìn)度,QXi、QYi、QZi為該軸向上施工質(zhì)量。在上述空間軸向的施工控制下,形成如圖2所示的可視化轉(zhuǎn)化過程:
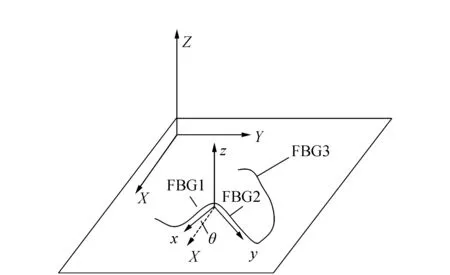
圖2 構(gòu)建的可視化轉(zhuǎn)化過程
在圖2所示的可視化轉(zhuǎn)化過程下,可視化施工進(jìn)度過程就可表示為式(9):
(9)
式中:H為轉(zhuǎn)換矩陣;θ為構(gòu)建的軸向與FBG1、FBG2與FBG3軸向間的夾角;ex、ey、ez為施工數(shù)據(jù)。可視化轉(zhuǎn)化處理施工數(shù)據(jù)后,根據(jù)可視化數(shù)值的變化,實現(xiàn)安全施工的監(jiān)測。
1.3 實現(xiàn)安全施工的監(jiān)測
將轉(zhuǎn)化后的項目進(jìn)度數(shù)據(jù)處理為圖像后,采用MSR算法構(gòu)建一個可視化監(jiān)測尺度,尺度可表示為式(10):
(10)
式中:N為尺度總數(shù);I(x,y)為尺度對應(yīng)的高斯函數(shù);wn為尺度權(quán)數(shù)。該尺度權(quán)數(shù)滿足式(11):
(11)
在上述參數(shù)的控制下,將可視化參數(shù)通過無線網(wǎng)絡(luò)傳輸至控制中心,監(jiān)測中心使用JAVA編程實現(xiàn)上述處理過程[13],設(shè)定如圖3所示的監(jiān)測過程:
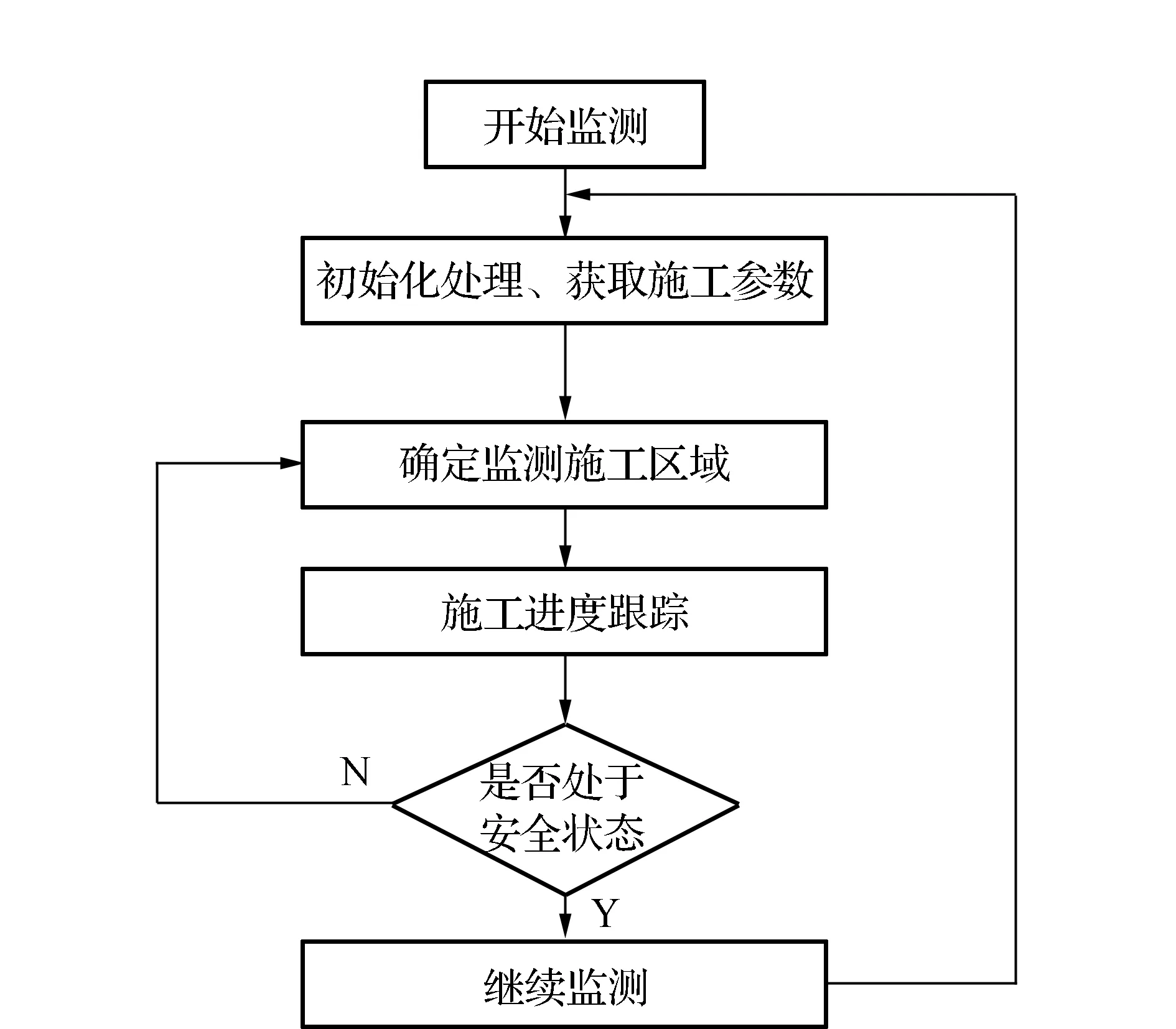
圖3 設(shè)定的監(jiān)測過程
在圖3所示的監(jiān)測過程下,首先使用幀間差分法判斷可視區(qū)域內(nèi)的施工進(jìn)度,通過施工進(jìn)度的特征點確定實際施工邊界,根據(jù)邊界數(shù)值顯示出的峰值點,確定安全施工狀態(tài)[14-15],最終完成對水口大壩基于BIM技術(shù)的安全施工可視化監(jiān)測方法的構(gòu)建。
2 仿真試驗
2.1 試驗準(zhǔn)備
準(zhǔn)備可視化設(shè)備RGBD相機,設(shè)置相機的參數(shù)指標(biāo),如表1所示:
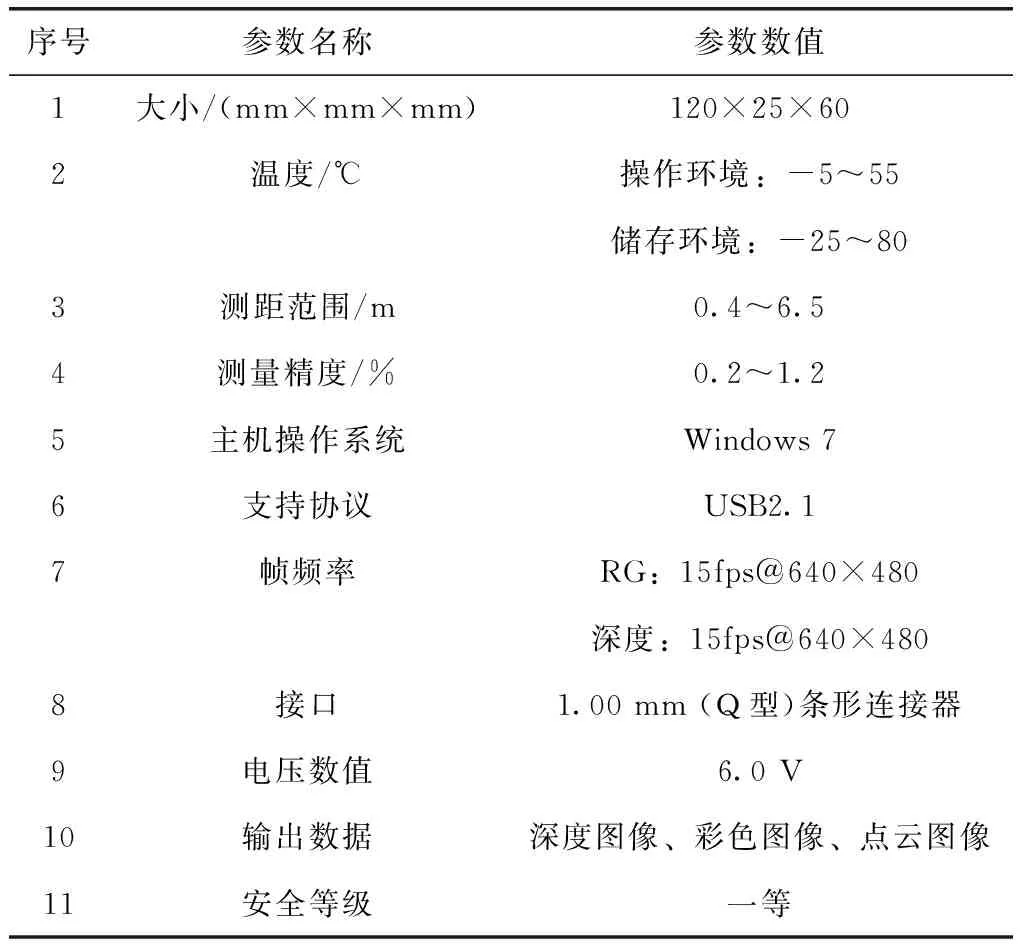
表1 設(shè)置的相機參數(shù)指標(biāo)
在表1所示的相機參數(shù)控制下,采用內(nèi)存為8 G、處理器為i5的計算機作為實驗主機。使用Python3.6作為算法的設(shè)計語言,采用Opencv3作為機器視覺工具,在上述軟硬件環(huán)境的支持下,模擬設(shè)置水口大壩的施工監(jiān)測點,以大壩的兩個主縱梁為測點的安置位置。
控制設(shè)置的測點與沿著橋軸線方向與橋梁軸線平行,設(shè)置的測控位置結(jié)果如表2所示:
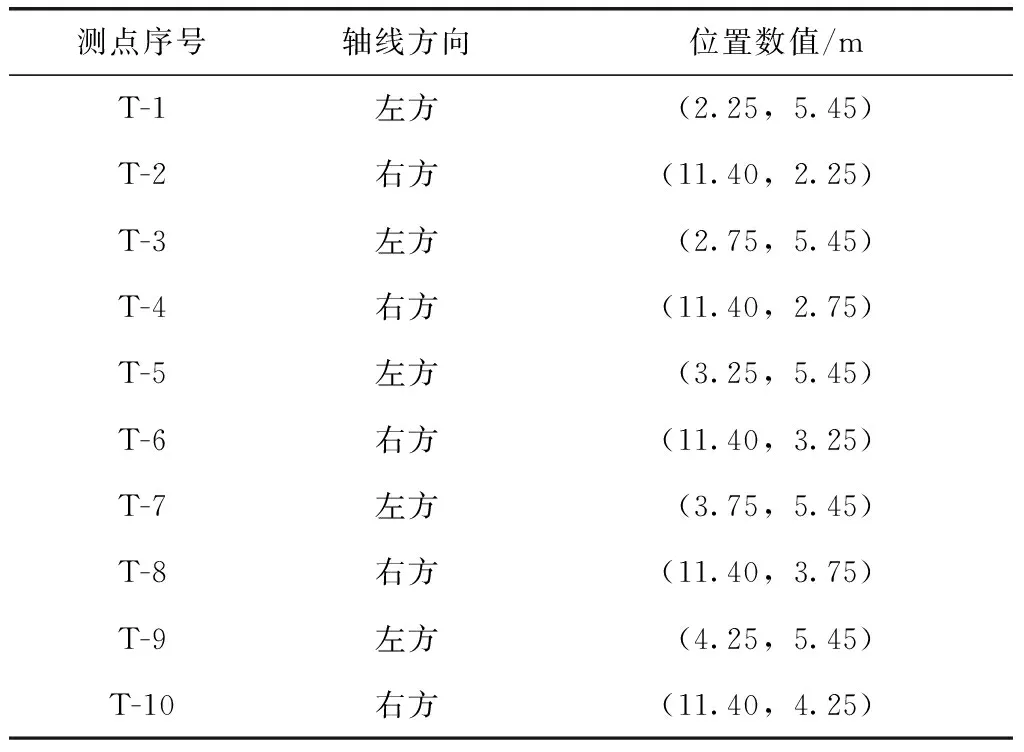
表2 設(shè)置的測點位置
在表2設(shè)置的測點位置,安置監(jiān)測設(shè)備后,調(diào)試軟硬件的環(huán)境,分別使用文獻(xiàn)[1]中的可視化監(jiān)測方法、文獻(xiàn)[2]中的可視化監(jiān)測方法以及文中設(shè)計的可視化監(jiān)測方法進(jìn)行實驗,對比三種可視化監(jiān)測方法的性能。
2.2 結(jié)果及分析
基于上述實驗準(zhǔn)備,在目標(biāo)施工工程中,設(shè)定水口大壩的實際施工進(jìn)度為1000 mm,并以此為施工標(biāo)準(zhǔn)數(shù)值,統(tǒng)計并計算在設(shè)定的測點處得到的施工進(jìn)度數(shù)值,進(jìn)度數(shù)值結(jié)果如表3所示。
由表3所示的項目進(jìn)度數(shù)值結(jié)果可知,在三種不同的可視化監(jiān)測方法下,以相同位置的測點為處理對象,文獻(xiàn)[1]中的可視化監(jiān)測方法得到的進(jìn)度數(shù)據(jù)數(shù)值最小,遠(yuǎn)遠(yuǎn)小于實際的施工進(jìn)度數(shù)值。文獻(xiàn)[2]中的可視化監(jiān)測方法最終得到的項目監(jiān)測數(shù)據(jù)在800~900 mm,得到的項目進(jìn)度數(shù)據(jù)較大,但與實際的進(jìn)度數(shù)值還有較大的偏差。而文中設(shè)計的可視化監(jiān)測方法得到的施工進(jìn)度數(shù)值最大,與實際的施工數(shù)據(jù)相差不大,監(jiān)測得到的施工進(jìn)度數(shù)據(jù)最準(zhǔn)確。
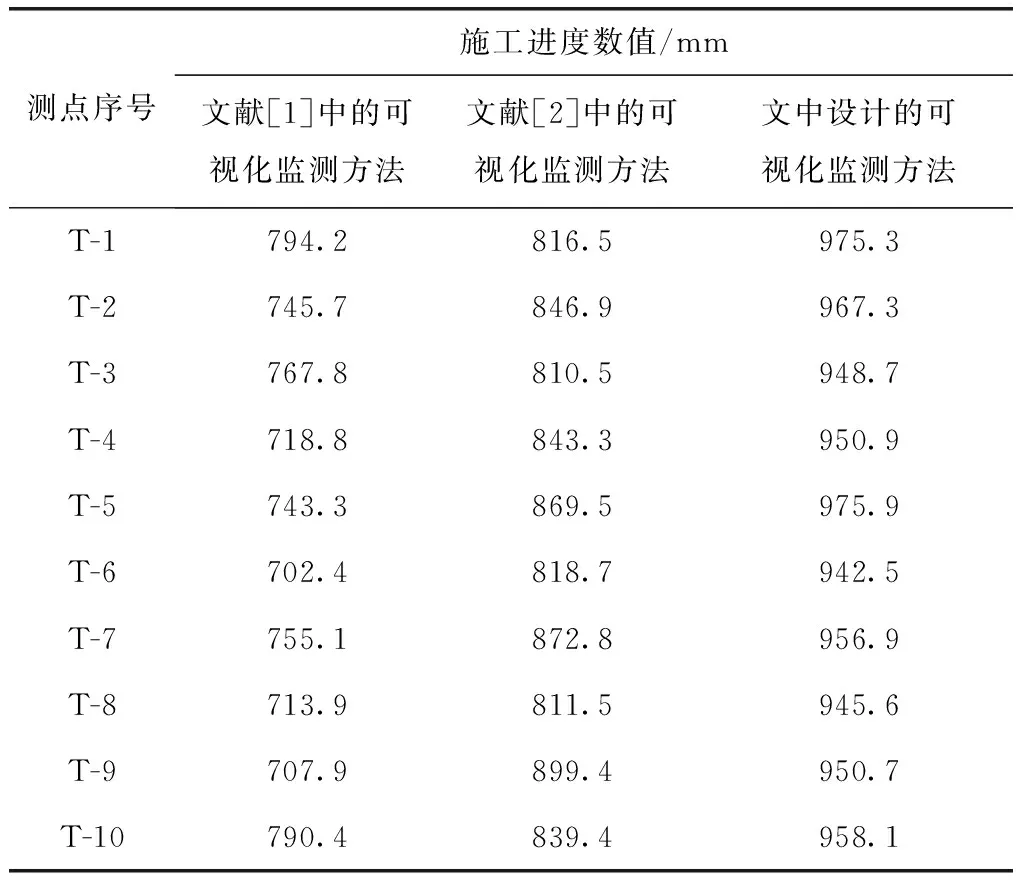
表3 不同監(jiān)測方法得到的施工進(jìn)度數(shù)值
保持上述試驗環(huán)境不變,設(shè)定三種監(jiān)測方法的監(jiān)測周期相同,設(shè)置周期內(nèi)可監(jiān)控的施工活動數(shù)值為50,其中違規(guī)操作為5,統(tǒng)計三種可視化監(jiān)測方法在監(jiān)測過程中產(chǎn)生的誤報次數(shù),計算三種監(jiān)測方法產(chǎn)生的誤報率,誤報率計算公式可表示為式(12):
(12)
式中:c為三種可視化監(jiān)測方法產(chǎn)生的誤報次數(shù);ct為監(jiān)測違規(guī)次數(shù)。統(tǒng)計三種監(jiān)測方法下,三種可視化監(jiān)測方法產(chǎn)生的誤報率結(jié)果,結(jié)果如表4所示:

表4 三種可視化監(jiān)測方法產(chǎn)生的安全誤報率
由表4所示的安全誤報率數(shù)值可知,在三種不同的可視化監(jiān)測方法的控制下,文獻(xiàn)[1]中的可視化監(jiān)測方法產(chǎn)生的安全誤報率數(shù)值最大,文獻(xiàn)[2]中的可視化監(jiān)測方法產(chǎn)生的誤報率數(shù)值在14%~18%之間,安全誤報率數(shù)值較小,而文中設(shè)計的可視化監(jiān)測方法產(chǎn)生的誤報率數(shù)值在5.3%~7.8%之間,實際監(jiān)測過程產(chǎn)生的誤報次數(shù)最少。
在上述試驗環(huán)境下,定義大壩安全施工的安全狀態(tài)參數(shù),定義的安全狀態(tài)參數(shù)可表示為式(13):
(13)
式中:A、B、C、D分別為水口大壩的監(jiān)測點所在平面的安全系數(shù);xi、yi、zi分別為監(jiān)測平面面積。根據(jù)式(13)統(tǒng)計得到三種監(jiān)測方法計算的安全參數(shù),結(jié)果如表5所示:
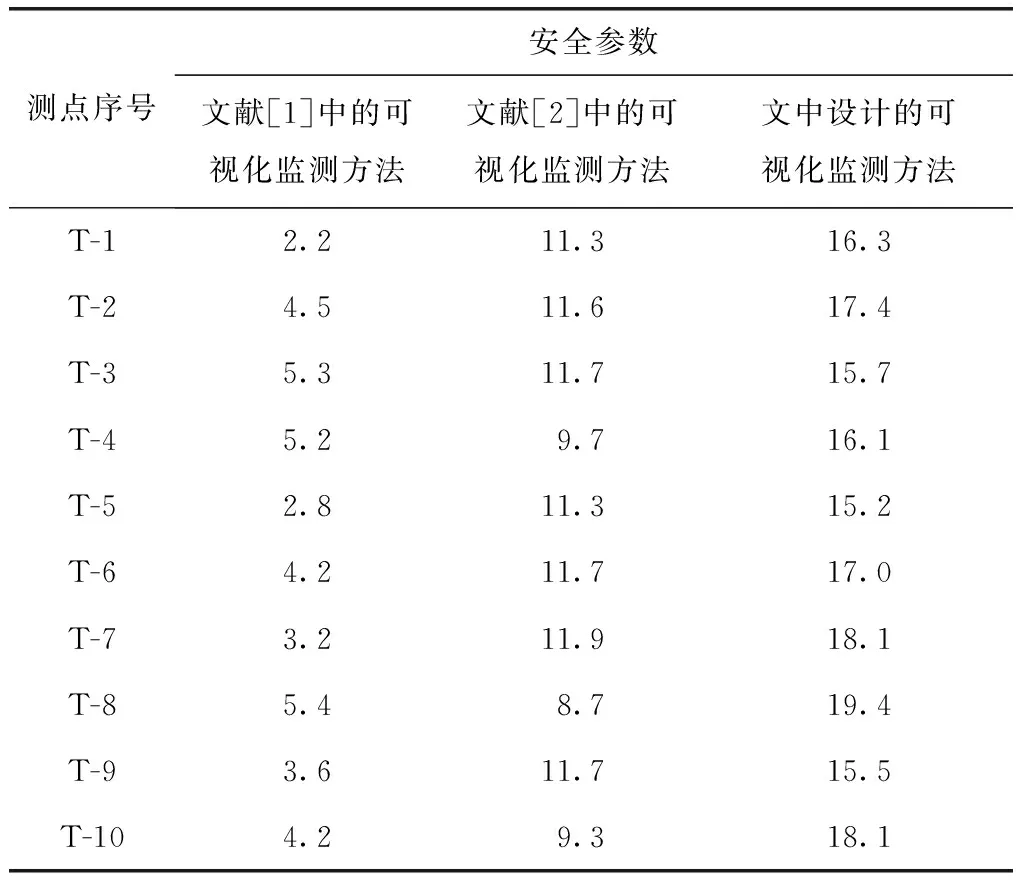
表5 三種監(jiān)測方法安全參數(shù)結(jié)果
根據(jù)設(shè)定的安全參數(shù)計算過程可知,在三種監(jiān)測方法的控制下,文獻(xiàn)[1]中的監(jiān)測方法與文獻(xiàn)[2]中的監(jiān)測方法最終得到的安全參數(shù)數(shù)值均小于文中設(shè)計的可視化監(jiān)測方法。綜合上述實驗結(jié)果可知,在實際監(jiān)測過程中,兩種文獻(xiàn)中的可視化監(jiān)測方法得到的施工進(jìn)度數(shù)值存在偏差、安全誤報率的數(shù)值較大且監(jiān)測過程存在較大的安全風(fēng)險。
3 結(jié) 論
針對水口大壩安全施工的可視化監(jiān)測過程中出現(xiàn)的一些不足,在BIM技術(shù)支持下,研究一種大壩安全施工可視化監(jiān)測方法,彌補了現(xiàn)有監(jiān)測方法安全參數(shù)過小的不足,為今后研究可視化監(jiān)測過程提供研究方向,但該種可視化監(jiān)測方法并未使用實際的水利工程數(shù)據(jù),在實際應(yīng)用過程中還存在很大的不確定性,還需要不斷地研究改進(jìn)。
猜你喜歡
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
建材發(fā)展導(dǎo)向(2021年9期)2021-07-16 07:11:36
海洋信息技術(shù)與應(yīng)用(2020年1期)2020-06-11 12:43:56
傳媒評論(2019年4期)2019-07-13 05:49:14
Coco薇(2016年2期)2016-03-22 02:42:52
中國房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56