基于PLC的高空施工作業車電氣控制系統分析
2021-07-04 12:44:04榆林職業技術學院高勇
河北農機 2021年6期
榆林職業技術學院 高勇
1 高空作業車的構成
在現有的建筑領域中,高空作業車大多由一般動力系統、液壓系統、電氣控制系統、轉向裝置、行走裝置、回轉裝置、作業斗橫向擺動裝置、伸縮臂變幅裝置、操作裝置、作業斗自動調平裝置和安全裝置等結構構成。在操作方式上,現有的高空作業車通常有總臺控制、地面控制和吊籃控制三種操作方式。其中總臺控制主要是控制動力的啟動與停止,對吊籃的手動調節以及對地面控制和吊籃控制的選擇。同時還具備一些檢測指示,用以保證高空作業車的平穩運行。相較于總臺控制而言,地面控制設置有急停按鈕,當高空作業車發生意外時,只要按下緊急制動按鈕,高空作業車就會停止作業,大多用以保證施工安全。吊籃控制主要針對于高空作業車吊籃的上下運行。
目前,高空作業車需要實現的功能有行走、主體回轉、支腿升降、大臂的提升與下降、大臂的伸縮、小臂的提升與下降、吊籃的旋轉等。這些功能在目前的高空作業車中都能夠實現,在運行過程中也能夠較為順利地完成施工任務,對施工的安全程度也有一定的保障。其中關于高空作業車的方向控制,例如吊籃的旋轉、大臂的上升與下降、支腳動作等,都需要運用電子閥來控制。
2 高空作業車的液壓系統原理
圖1 是能夠自行伸縮的臂式支柱性高空作業平臺的液壓系統原理圖。由圖可知,液壓系統是由上車液壓系統和下車液壓系統共同組成的,兩個液壓系統之間由回轉頭連接,帶油泵的發動機則是液壓系統的主要動力。其中上液壓系統主要是由工作臂變幅和伸縮系統、整車回轉系統、吊籃調平系統和吊籃旋轉等系統組成,而下車液壓系統則是由行走系統、轉向系統、支腿動作系統組成。
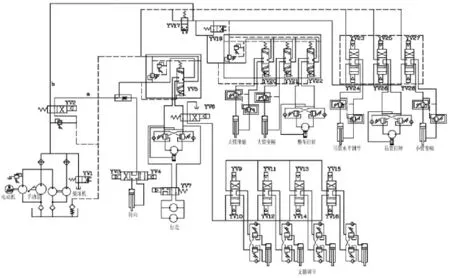
圖1 液壓原理圖
3 PLC的型號選擇
3.1 PLC型號選擇
PLC控制系統在傳統控制器的基礎上引入了微電子技術計算機技術、自動控制技術以及通訊技術而形成的新型工業裝置,主要是為了取代繼電器,并實現執行邏輯,計時和計數的簡單控制功能。PLC能夠有效建立遠程控制體系,并具有通用性較強、使用便捷、適應范圍較廣、抗干擾能力強的特點,在編程內容上也較為簡單。
PCL在高空作業車的使用中,主要是以微處理器為核心,融合了自動控制技術,微型計算機技術以及網絡通信技術等,是目前在建筑領域應用最為廣泛的工業自動化裝置。在對PLC編程硬件的選擇上,主要選取了西門子公司的S7-200可編程控制器,相較于其他的可編程控制器而言,S7-200具有形態小、適用范圍廣的特點,能夠有效適用于各種場合的材料檢測,以及控制自動化的需要。除此之外,PCL的硬件設施主要由中央處理器、輸入單元、存儲器、輸出單元、擴展接口、通信接口、電源等部分組成。
3.2 CPU的選擇
CPU作為PCL運行的基礎,在選擇CPU時要兼顧PCL的工作任務以及工作強度,充分保證PCL的有效運行。因此,我們對CPU選擇SIMATICS7-200CPU226模塊。
CPU226優點在于能夠集成24輸入/16輸出共40個數字量I/O點。能夠連接7個擴展模塊,最大甚至可以擴展至248路數字量I/O點或35路模擬量I/O點。13K字節程序和數據存儲空間。6個獨立的30kHz高速計數器,2路獨立的20kHz高速脈沖輸出,具有PID控制器,2個RS485通訊/編程口,具有PPI通訊協議、MPI通訊協議和自由方式通訊能力。
4 高空作業車的控制系統
電氣控制系統是高空作業車的主要控制系統,具體操作方式是將高空作業平臺檢測到的裝置信號輸入至系統內,經過中心處理器處理后,輸出到相應的繼電器線圈作為不同部件動作的約束條件或者是指令條件。因此,電氣系統的有效運行是高空作業車平臺安全運營的有力保障。
4.1 電氣控制系統的安全監測要求
安全監測過程是為了檢測各個部件的功能是否能夠正常運行,并將檢測結果及時反饋到專業的操作人員處,使操作人員能夠及時解決可能出現的問題或者進行人工操作,避免高空作業車出現運行問題。
在本次檢測中,主要的檢測部件有:支腿、車身、大臂、小臂、吊籃。主要監測內容有:
支腿:通過壓力傳感器檢測支腿是否出現失穩情況,主要檢測方式是微動開關,使支腿空撐進行檢測。
車體:車體檢測主要是通過IDXY雙軸傾角傳感器來檢測車體的傾斜程度,或者通過行程開關來進行轉臺復位檢測。
大臂:通過行程開關來進行大臂復位檢測,或者可以通過長角度傳感器來測量大臂的伸出量和角度。
吊籃:吊籃的傾斜程度主要是由單軸傾角傳感器檢測,吊籃的載重多少則是由力傳感器檢測。最后防撞檢測是通過專有的防撞開關進行檢測的。

圖2 檢測裝置分布圖
4.2 電氣控制系統方案
在上文中我們詳細敘述了高空作業車各個部件的功能和局限性,并對不同部位的安全監測方式做了較為詳細的闡述。由此我們可知,目前高空作業平臺的最大特點是作業頻率不高,承載能力較小,但同時對高空作業車的自動化程度、安全性以及可靠性要求較高。因此,我們在設計相關的可控制編程器是需要提高控制系統的抗干擾能力以及可靠性,從而提高可控制編程的適用性。本文對可控制編程主要采用邏輯控制的方式,使得高空作業車能夠在各部件完成安全監測的同時,處于一個穩定可靠安全的環境,并能夠有效運行。如圖3所示。從圖3中我們可以看到,本文的可控制編程設計主要是由以下幾大部分構成:

圖3 蜘蛛式高空作業車電氣控制結構圖
地面控制面板的操作;動力的啟停;支腿、車身、大臂、小臂、吊籃的檢測。
地面控制面板的操作;吊籃控制面板的操作;S7-200;作業車的上下車的操作。
5 結論
本文所設計的可控制編程系統實現了電氣控制的基本功能。當按下啟動按鈕之后,機器啟動,控制電路接通。并以此輸入命令就可以實現車輛的行走,包括高空作業車的左右轉向和前后行走,對大臂動作的控制則體現在大臂的升降與伸縮方面,小臂動作則主要包括小臂的提升和下降,吊籃則是吊籃的旋轉和調平。除此之外,該可控制編程還能夠實現不同信號的檢測,例如對吊籃的稱重、調平、防撞;對支腿和底盤平衡的檢測等,都能夠對高空作業車的操作功能進行模仿。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
