差動變壓器式位移傳感器性能穩定性技術研究
2021-07-05 16:18:46朱廷偉楊超凡任海燕
電子元件與材料 2021年6期
余 菲,孫 楠,朱廷偉,楊超凡,任海燕
(北京精密機電控制設備研究所,北京 100076)
差動變壓器式位移傳感器作為航天伺服系統作動器控制反饋元件,參與發動機噴管擺動控制。隨著差動變壓器式位移傳感器的發展,其具有工作可靠、準確度高、精度高、結構簡單、靈敏度高、使用壽命長、環境適應性強等優點[1-3],廣泛應用于航天伺服系統。
隨著我國航天事業的不斷發展,伺服系統對位移傳感器的需求量也不斷上升,同時要求位移傳感器不斷地進行技術革新,提高位移傳感器精度、可靠性及壽命,以滿足伺服系統高精度、高可靠性及長壽命等要求。同時,對位移傳感器環境適應性也提出了較高要求,例如,強力學環境要求、復雜電磁環境要求及寬溫域下高精度工作要求等,這使得位移傳感器結構設計及信號調理電路設計均有了較大改變,對于飛行過程中強力學環境,可通過增加初級線圈、次級線圈繞組線徑的方式,使位移傳感器滿足強力學環境要求;對于復雜電磁環境,可通過選材、增加位移傳感器電磁屏蔽設計及改善電路濾波等方式予以解決;對于寬溫域下的位移傳感器高精度要求,需對傳感器進行溫度補償。
為使差動變壓器式位移傳感器在全溫域下能夠更精確更高效地在伺服系統中工作,本文在分析了影響差動變壓器式位移傳感器性能穩定性因素的基礎上,介紹了提高性能穩定性的技術方法,以適應伺服系統在飛行過程中惡劣環境下的使用需求。
1 傳感器工作原理
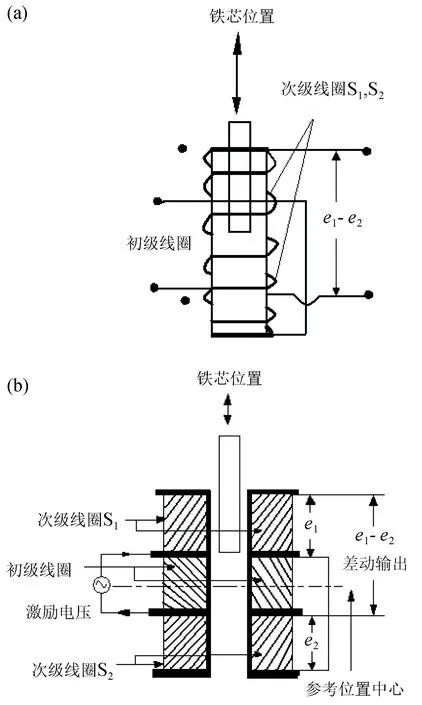
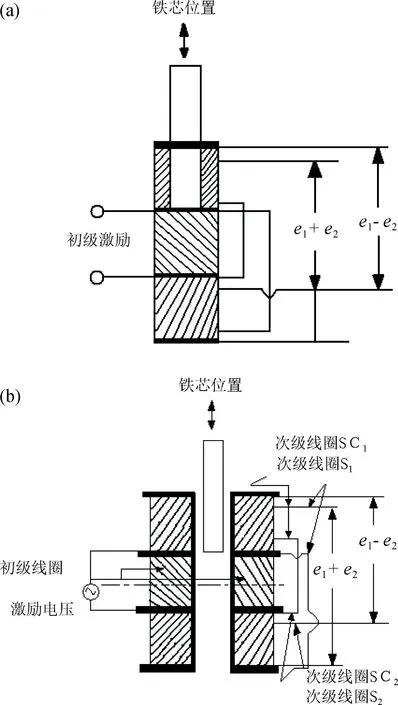
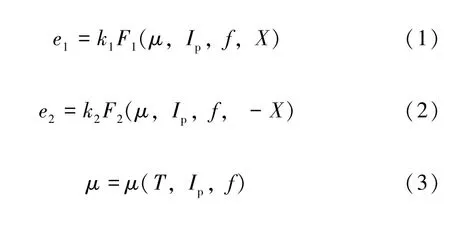
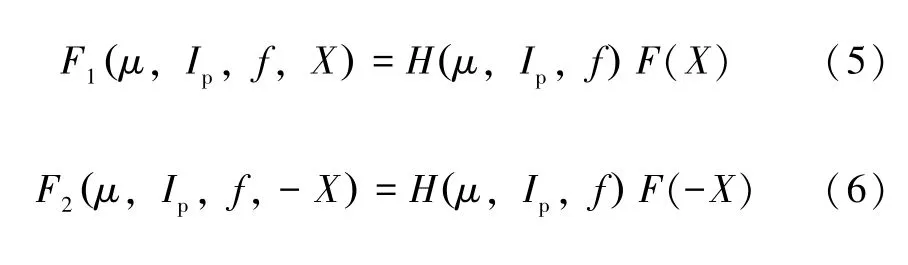
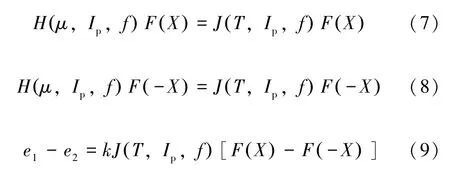
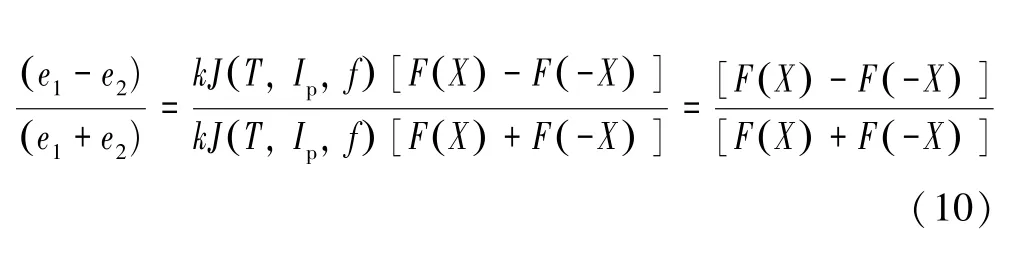
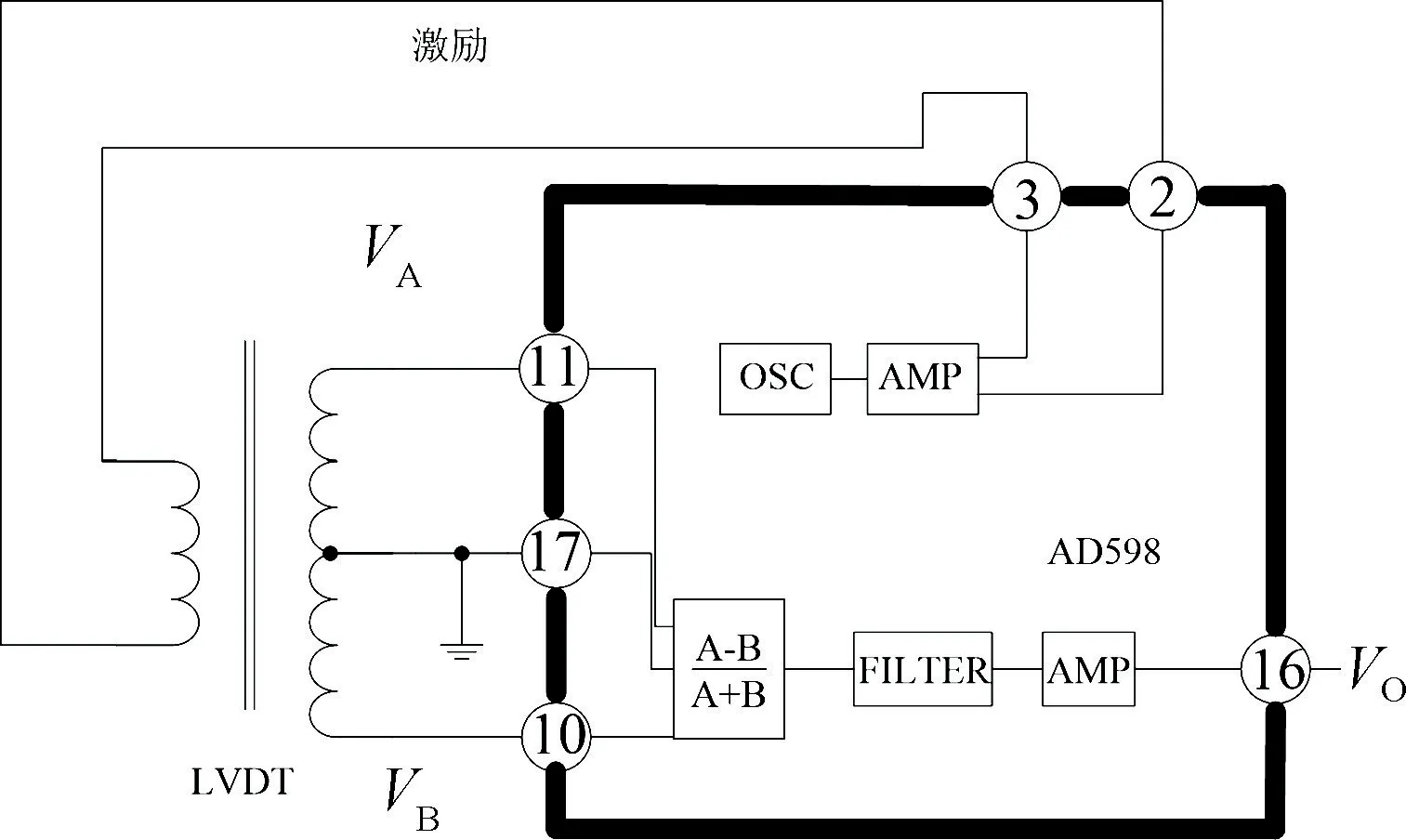
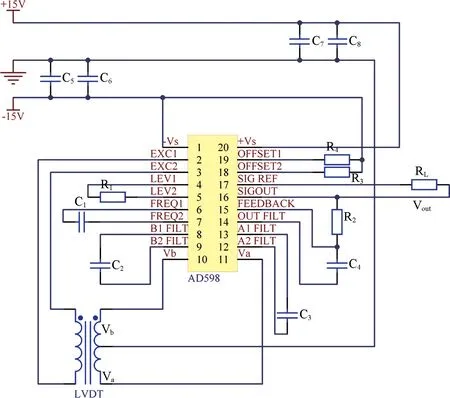
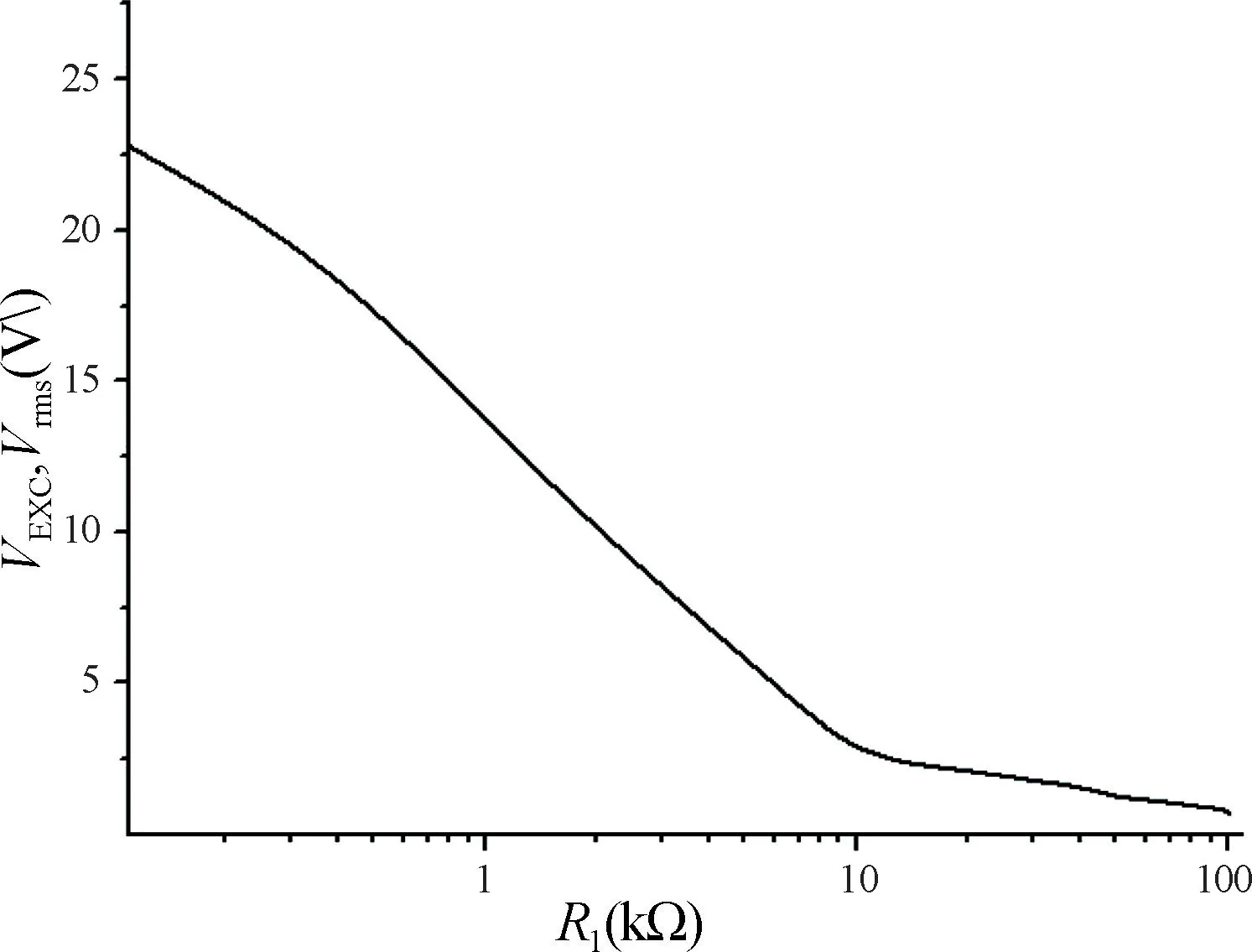
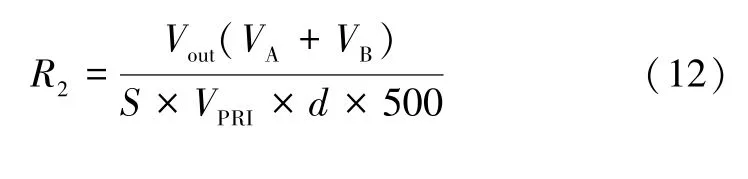
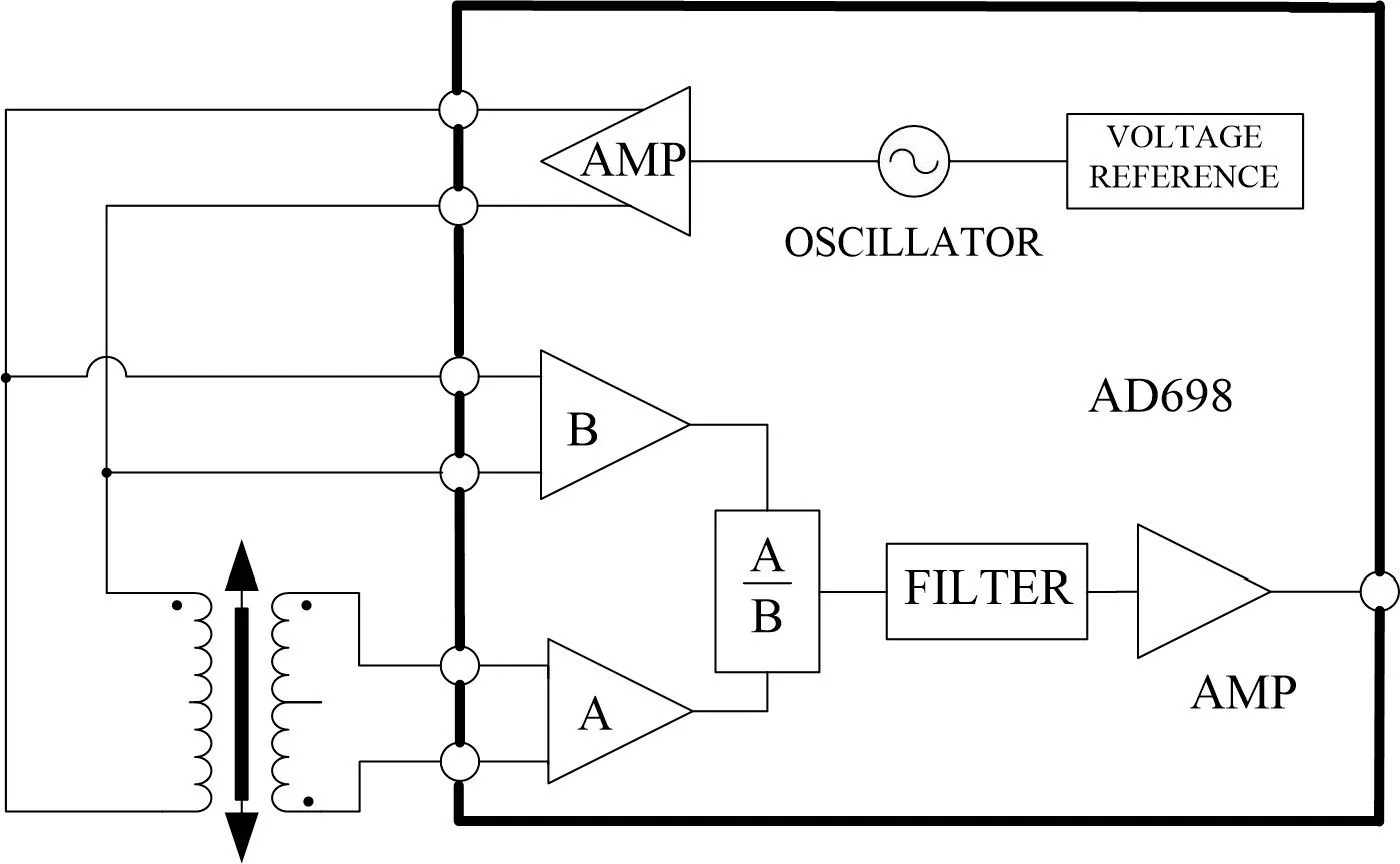
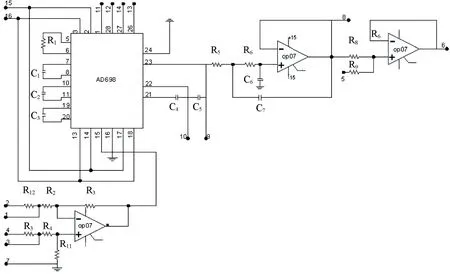
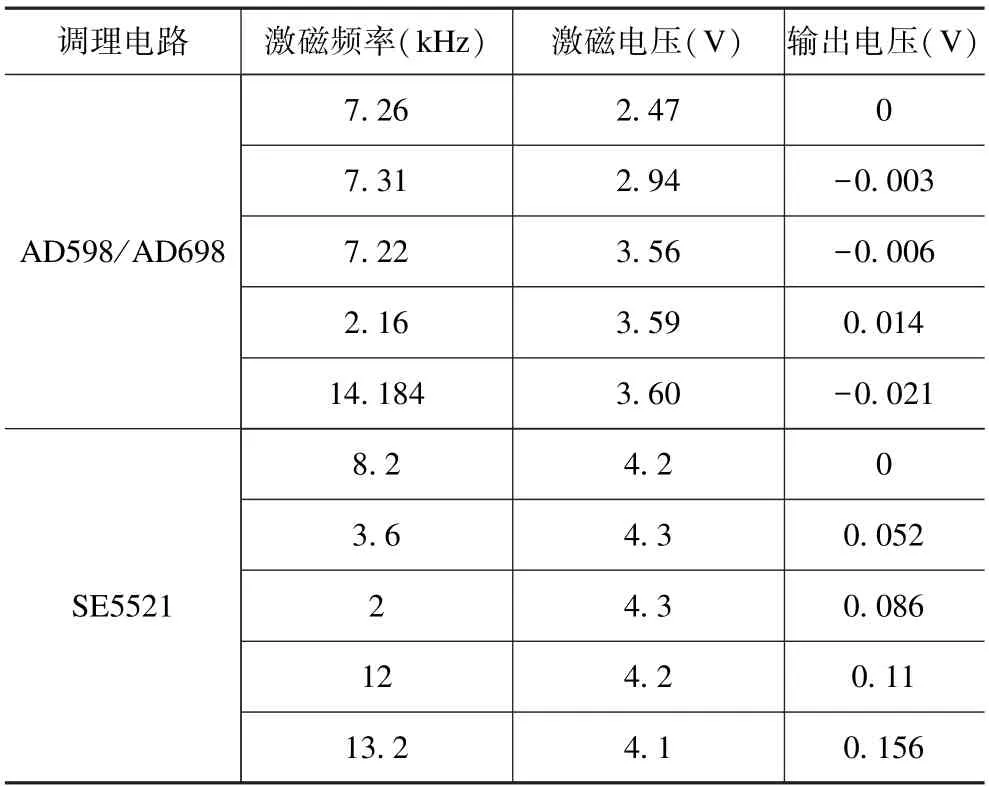
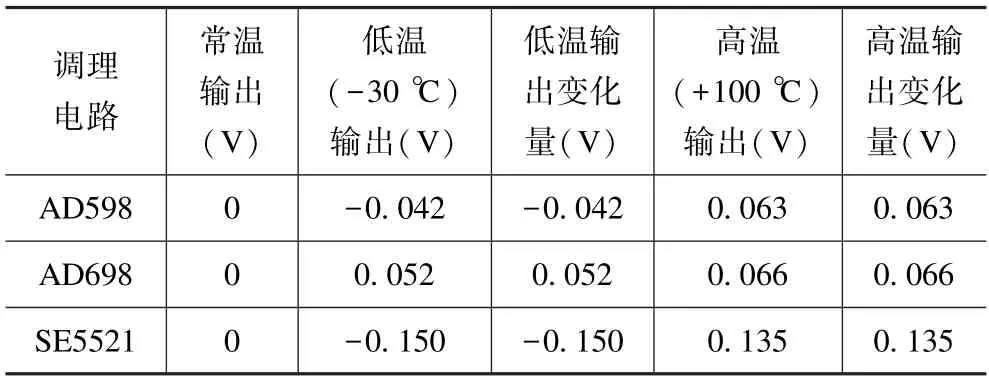
傳感器工作原理如圖1 所示,由初級線圈W 和兩個參數相同的次級線圈W1和W2組成。線圈中心插入鐵心P,次級線圈W1及W2反極性串聯。當初級線圈W 上加交流電壓時,次級線圈W1及W2產生感應電勢e1與e2。當鐵心在中心位置(X=0)時,e1=e2,輸出電壓e0=0;鐵心向上運動時,e1>e2;鐵心向下運動時,e1 圖1 差動變壓器式位移傳感器工作原理Fig.1 Schematic diagram of LVDT 差動變壓器式位移傳感器具有良好的靈敏度和一致性、較高的精度和可靠性以及較長的使用壽命等特點,已廣泛用于航天領域伺服系統中,參與發動機噴管擺動控制。作為線位移量測試的主要元件,差動變壓器式位移傳感器能夠實現在航天飛行過程中強力學環境、復雜電磁環境及寬溫域等惡劣環境下可靠工作,但其輸出特性仍會因外界環境條件的變化而發生改變,影響伺服系統的控制精度。 根據差動變壓器位移傳感器工作原理及結構可知,影響其工作性能的因素有傳感器幾何尺寸、初次級線圈繞組布置、鐵芯材料特性、激磁電流和頻率以及環境溫度變化。初級激磁影響線圈的阻抗和溫度分布,鐵芯磁導率也會受溫度、激磁電流和頻率變化的影響而發生變化[4-7]。 為補償這些影響,一般有如下方法:(1)在后續傳感器信號變送調理電路中增加熱敏電阻,以改變傳感器直流輸出下的溫度特性;(2)從傳感器自身出發,設計一種自補償差動變壓器式位移傳感器,在進行位移傳感器次級線圈繞制時,繞制雙次級線圈,改變差動變壓器式位移傳感器自身的溫度特性,從根本上提高位移傳感器性能穩定性;(3)考慮到傳感器一般采用以SE5521 芯片為核心的信號變送調理電路進行信號調理,輸出直流電壓信號,通過改變調理芯片,解決傳感器在全溫域下的性能穩定性問題。 鑒于溫度對位移傳感器性能影響主要體現在傳感器輸出特性會根據溫度的改變而發生變化,故可在位移傳感器后續的信號變送調理電路中,使用熱敏電阻補償溫度對傳感器的影響,使傳感器在一定溫度范圍內輸出特性得到改善。采用該方法,雖能有效地改變傳感器在一定溫度范圍內的輸出特性,但采用熱敏電阻補償方式無法對傳感器進行全溫域補償,無法實現位移傳感器在全溫域下高精度工作的要求。此外,考慮到差動變壓器式位移傳感器結構特點,傳感器溫度特性散布較大,采用熱敏電阻進行溫度補償的方法需對每一臺傳感器進行調試配對,并選用不同溫度特性的熱敏電阻,故采用該方法進行配對難度較大。 圖2(a)和(b)表示的是傳統位移傳感器,差動信號(e1-e2)取自次級線圈S1和S2。圖3(a)和(b)表示采用自補償技術的傳感器原理結構,它設有兩組次級線圈S1、SC1和S2、SC2,這兩組次級線圈的環境溫度特性和所受激勵條件完全相同,通過不同接線方式,使線圈產生兩路輸出,一路為(e1-e2),另一路為(e1+e2)。 圖2 無補償位移傳感器。(a)簡化圖;(b)截面圖Fig.2 Uncompensated LVDT.(a) Reduced graph;(b)Sectional view 圖3 自補償位移傳感器。(a)簡化圖;(b)截面圖Fig.3 Self-compensated LVDT.(a) Reduced graph;(b)Sectional view 對于位移傳感器: 式中:e1為次級線圈S1和SC1感應電壓;e2為次級線圈S2和SC2感應電壓;μ為鐵芯材料磁導率;Ip為初級激磁電流;f為初級激磁頻率;X為鐵芯位移;T為環境溫度;k1,k2均為與線圈、鐵芯、其他裝配結構尺寸及初次級線圈匝數有關的常數。 對無補償的位移傳感器: 如果位移在正常有限范圍,那么X因數可以F(X)的形式分離出來。對于完全對稱結構,k1=k2=k,則: 因為μ=μ(T,Ip,f),因此 可知輸出(e1-e2)與溫度、激磁電流、激磁頻率等傳感器參數有關。若將輸出用(e1-e2)/ (e1+e2)表示,則: 上述表達式不含T,Ip和f,因此與這些參數無關。由于F(X)+F(-X)在鐵芯位移X變化時保持恒定不變,故輸出取決于差動信號[F(X)-F(-X)],消除了溫度、激磁電流、激磁頻率等傳感器參數的影響,可以通過構建IC 除法器實現。 采用該方法提高傳感器性能穩定性,實現難度較大,對傳感器繞線結構、繞線方式要求較高,但可有效地消除溫度、激磁電流、激磁頻率等對傳感器輸出造成的影響,從根本上提高了傳感器性能穩定性。 根據上述自補償傳感器原理可知,傳感器的次級線圈不必用兩組,繼續使用完全對稱的一組次級線圈,僅需在原有SE5521 信號變送調理電路基礎上,構建新的信號變送調理電路,使其完成(e1-e2)/(e1+e2)算法即可,再用后續電路完成解調、濾波及放大等功能,使其最終輸出與溫度、激磁電流、激磁頻率等傳感器參數無關的直流電壓。采用該方法可有效地降低差動變壓器式位移傳感器線圈繞制難度,解決傳感器在寬溫域下輸出受溫度影響的問題。通過對不同變送器芯片進行分析,AD598 變送器芯片完全可以實現上述功能[6-8]。 3.3.1 基于AD598 變送器的位移傳感器信號變送調理電路 AD598 是一種完整的單片式位移傳感器信號變送調理電路,其原理框圖如圖4 所示。 圖4 AD598 原理框圖Fig.4 Schematic diagram of AD598 AD598 對差動變壓器式位移傳感器進行信號調理,能夠將位移傳感器的機械位置變化轉換成單極性或雙極性輸出的高精度直流電壓。AD598 將所有的電路功能都集成在一塊芯片上,在外圍電路中增加電阻及電容等無源元件,就能確定激磁信號幅值、頻率及輸出電壓的幅值。AD598 芯片內部存在如下功能模塊:(1)可產生位移傳感器初級激磁信號的低失真正弦波振蕩器;(2)輸出放大器;(3)接收位移傳感器次級輸出的兩個正弦信號的輸入級、除法器、濾波器及其輸出放大器,在AD598 的除法器中,將來自位移傳感器次級的兩路輸出實現(e1-e2)/(e1+e2)算法。 AD598 芯片電路圖如圖5 所示,這種電路方式需要位移傳感器引出中間抽頭,即需引出差動變壓器式位移傳感器同名端抽頭,適用于輸出形式為五線制(輸出線為五根)或六線制的位移傳感器。 圖5 位移傳感器變送電路圖Fig.5 The transmitter circuit diagram of LVDT (1)信號發生器部分 由C1決定激磁電壓頻率f,C1=35/f,若f=8 kHz,則C1=4375 pF,選擇4300 pF。 采用AD598 解調電路時,輸入電壓VIN的有效值Vrms在1~3.5 V 時其線性度最好,噪聲最小,故首先根據傳感器的電壓傳遞系數VTR(傳感器激勵電壓VPRI與次級線圈輸出電壓VSEC的比值),求出傳感器輸出電壓VEXC,再根據圖6 決定R1大小。 圖6 R1 與VEXC的關系Fig.6 The relationship of R1 and VEXC (2)濾波器部分 電容C2,C3和C4是AD598 位置測量系統所要求的頻帶寬度函數,其標稱值與系統頻率fSYS有關,為:C2=C3=C4=10-4/fSYS,取fSYS=100 Hz,則C2=C3=C4=0.01 μF,滿足伺服系統要求,即在頻率f=50 Hz 時滿足幅值比為1±1%,相位滯后不大于3°的頻響要求。 (3)零位、增益調整 電阻R2確定AD598 增益和滿量程輸出電壓范圍。 式中:S為LVDT 的靈敏度;d、Vout分別為滿量程時鐵芯的位移和電壓輸出;VPRI為初級激磁電壓。 R3和R4可確定正或負的輸出失調電壓調整范圍,即可以用來調整傳感器的最終零位輸出電壓VOS。 位移傳感器的零位不需調整時,R3和R4開路,若需正向調整將R4開路,反之將R3開路。 3.3.2 基于AD698 變送器的位移傳感器信號變送調理電路 雖然以AD598 的變送算法完全滿足式(10)需要,但由于其適用于輸出形式為五線制或六線制的位移傳感器,不適用于四線制輸出的位移傳感器,其實用能力具有一定的局限性。而AD698 信號變送調理電路的變送算法與之類似,也能消除如頻率、激磁電流及溫度的影響,特別是AD698 可適用于各種輸出形式的位移傳感器,使用AD698 更方便[9-13]。故在本研究中,采用AD698 構建傳感器信號變送調理電路,圖7 為AD698 原理框圖,其基本功能為:芯片內部集成了信號發生放大電路、信號比率解調電路、濾波和放大電路,通過對AD698 與LVDT 進行配調,能夠高精確和高再現性地將位移傳感器的機械位移轉換成單極性或雙極性的直流電壓。 圖7 AD698 原理框圖Fig.7 Schematic diagram of AD698 圖8 所示為基于AD698 的位移信號變送調理電路,對于輸出形式為五線制或六線制的位移傳感器,可將位移傳感器次級線圈中心抽頭直接或短接后接4點和地,對于輸出形式為四線制的位移傳感器,將位移傳感器的交流輸出信號接1 點、2 點。因為AD698內部的濾波器不能滿足需要,故增加了二階有源濾波器。信號發生器和零位及增益參數的計算同AD598。 圖8 基于AD698 的位移變送器電路圖Fig.8 The transmitter circuit diagram of displacement based on AD698 3.3.3 試驗分析 由于位移傳感器所用信號變送調理電路包括SE5521、AD698 及AD598 信號變送調理電路,故對上述三種信號變送調理電路進行試驗,對影響位移傳感器性能的溫度、激磁電壓、激磁頻率等進行試驗,并對試驗結果進行分析比較。 (1) 常溫試驗 對同一臺位移傳感器,固定位移傳感器拉桿位置,使信號調理電路直流輸出為0 V,改變位移傳感器的激磁電壓及激磁頻率,試驗結果見表1。 從表1 中可以看出:對于AD598/AD698 信號變送調理電路,當改變信號變送調理電路激磁電壓時,對輸出影響較小,當改變信號變送調理電路激磁頻率時,經芯片解調后輸出的直流電壓出現變化;對SE5521 信號變送調理電路,在改變外圍電阻、電容時,激磁電壓幅值幾乎不隨外加阻容改變,激磁頻率改變時,直流輸出變化較大,且該輸出的變化比AD598/AD698 要大。故采用AD598/AD698 芯片可有效地消除激磁電壓、激磁頻率對位移傳感器性能的影響。 表1 AD598/AD698 常溫試驗數據Tab.1 The experimental data of AD598/AD698 at normal temperature (2) 溫度試驗 用同一臺位移傳感器與不同信號變送調理電路配對,置于溫度箱內,并調節拉桿使位移傳感器處于零位位置,調整溫度箱溫度,測量位移傳感器的輸出,結果見表2。 從表2 可以看出,位移傳感器與AD598/AD698配對下,在溫度影響下,位移傳感器輸出變化較小,其變化量遠小于位移傳感器與SE5521 配對形式。數據變化原因為位移傳感器及信號變送調理電路在溫度下數據變化累積。 表2 溫度試驗數據Tab.2 The experimental data at different temperatures 故對信號變送調理電路進行溫度特性試驗,試驗方法是將信號變送調理電路放在溫度環境中,位移傳感器處于常溫環境,結果見表3。 由表3 可以看出AD598/AD698 位移信號變送調理電路在溫度環境下輸出穩定,而表2 中輸出發生變化的原因為位移傳感器受溫度影響導致;SE5521 位移信號變送調理電路在溫度環境下出現較大變化,在于位移信號變送調理電路自身有較大溫度漂移所致,造成傳感器直流輸出變化量較大,影響了位移傳感器在全溫域下的精度。 表3 芯片溫度試驗數據Tab.3 The experimental data of chips at different temperatures 故通過對表1~ 3 數據進行比對分析,采用AD598/AD698 位移變送器可有效地減小溫度、激磁電壓及激磁頻率對傳感器性能的影響,提高傳感器性能穩定性,且采用AD598/AD698 位移變送器實現較為容易。 位移傳感器與傳統的信號變送調理電路匹配,直流輸出電壓易受外界環境溫度影響。為提高位移傳感器在全溫域范圍內高精度要求,可采用熱敏電阻改變位移傳感器溫度范圍、自補償差動變壓器式位移傳感器及改變位移傳感器信號變送調理電路方法,其中采用熱敏電阻雖能改變位移傳感器在一定溫度區域內的溫度特性,但無法進行全溫域補償,故無法實現位移傳感器全溫域高精度要求;而自補償差動變壓器式位移傳感器,通過在位移傳感器次級線圈上增加一組完全對稱的次級線圈,再輔以帶除法功能的信號變送調理電路,可以降低溫度對位移傳感器性能穩定性的影響,但缺點是位移傳感器繞線相對較麻煩。通過分析和試驗驗證,表明位移傳感器配以AD598/AD698 信號調理芯片,能較好地解決傳感器受環境溫度影響的問題,從而可以提高傳感器性能穩定性,采用該方法實現較為容易,且能保證位移傳感器在全溫域下高精度工作的要求。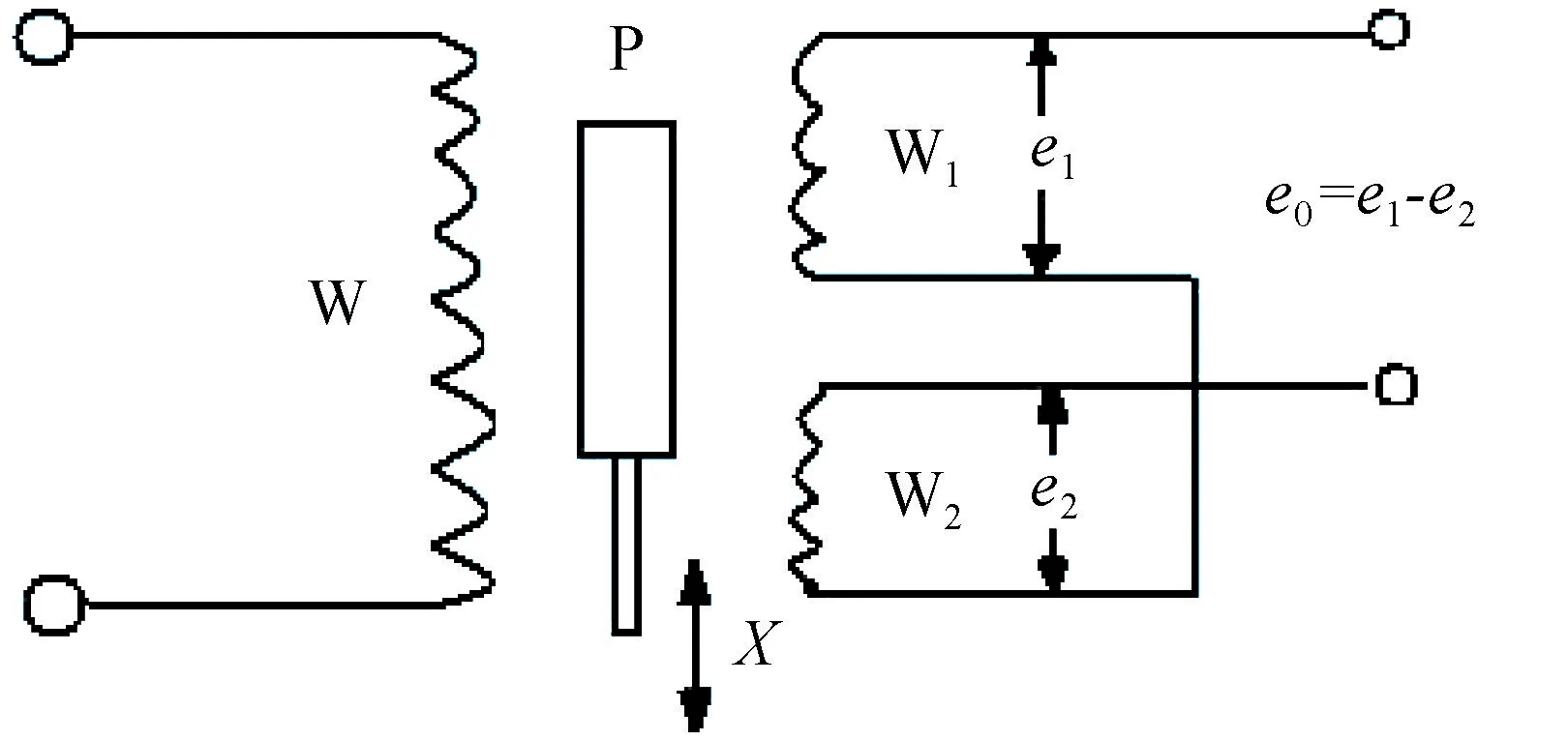
2 影響性能穩定因素分析
3 提高性能穩定性技術
3.1 采用熱敏電阻改變傳感器溫度特性
3.2 自補償差動變壓器式位移傳感器

3.3 位移傳感器信號變送調理電路



4 結論
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
通信電源技術(2018年3期)2018-06-26 06:33:30
現代工業經濟和信息化(2016年4期)2016-05-17 05:35:38
通信電源技術(2016年3期)2016-03-26 07:13:46
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
電測與儀表(2014年12期)2014-04-04 12:10:16
