機(jī)器人在軌裝配無標(biāo)定視覺伺服對(duì)準(zhǔn)方法
2021-07-07 11:36:06賈慶軒段嘉琪陳鋼
航空學(xué)報(bào) 2021年6期
賈慶軒,段嘉琪,陳鋼
北京郵電大學(xué) 自動(dòng)化學(xué)院,北京 100876
隨著對(duì)太空開發(fā)的不斷深入,空間結(jié)構(gòu)的大型化是未來航天事業(yè)發(fā)展的主要趨勢(shì)。許多科學(xué)研究計(jì)劃都要求有大型的空間結(jié)構(gòu)作為基礎(chǔ),如空間站需要千米級(jí)尺寸的太陽能電池陣列來提供充裕的能量[1];高分辨率對(duì)地觀測(cè)需要百米級(jí)的星載天線來提高精度[2-3];深空探測(cè)飛行器需要用超輕薄膜構(gòu)成的巨型太陽帆來利用太陽光子作為動(dòng)力[4-5]。但是受運(yùn)載火箭整流罩尺寸的限制,這類大型空間結(jié)構(gòu)無法由運(yùn)載器直接送入太空,需要由桁架在軌裝配而成[6-10]。
桁架在軌裝配過程中,空間機(jī)器人不可避免地需要利用視覺伺服完成大量對(duì)準(zhǔn)工作。傳統(tǒng)的機(jī)器人視覺伺服系統(tǒng)都是在對(duì)相機(jī)模型和機(jī)器人模型標(biāo)定的基礎(chǔ)上實(shí)現(xiàn)的,但在軌裝配過程中無法實(shí)現(xiàn)對(duì)系統(tǒng)的精確有效標(biāo)定,譬如美國(guó)用于在軌裝配的Sky-worker機(jī)器人[11]有一只手臂專門搭載相機(jī)。每次進(jìn)行裝配對(duì)準(zhǔn)時(shí),該機(jī)械臂就會(huì)規(guī)劃運(yùn)動(dòng)到相關(guān)位置完成“看”的動(dòng)作。因此每次對(duì)準(zhǔn)操作手眼之間的關(guān)系都不確定,而重新標(biāo)定十分復(fù)雜難以實(shí)現(xiàn)且會(huì)導(dǎo)致裝配效率低下,繼續(xù)沿用原標(biāo)定結(jié)果則會(huì)產(chǎn)生很大誤差[12]。除此之外已標(biāo)定結(jié)果也會(huì)受空間惡劣環(huán)境的影響而發(fā)生退化進(jìn)而影響裝配精度,如相機(jī)標(biāo)定參數(shù)會(huì)受到高輻射的影響而退化。無標(biāo)定視覺伺服可在不預(yù)先對(duì)相機(jī)模型、機(jī)器人模型和手眼關(guān)系標(biāo)定的前提下,直接利用圖像上的系統(tǒng)誤差,設(shè)計(jì)控制器驅(qū)動(dòng)機(jī)器人運(yùn)動(dòng),使系統(tǒng)收斂到一個(gè)容許的誤差域內(nèi)[13]。無標(biāo)定視覺伺服省去了繁瑣的標(biāo)定過程,在控制效率、應(yīng)用便利性及性能上均有較大的優(yōu)勢(shì)[14]。
此外,一方面考慮到機(jī)器人每次進(jìn)行桁架對(duì)準(zhǔn)操作時(shí),所持桁架隨著裝配進(jìn)行其形狀質(zhì)量都會(huì)發(fā)生變化,可能是尚未裝配連接的簡(jiǎn)單桁架,也可能是已部分搭建完成的大型桁架。因此在軌裝配視覺伺服系統(tǒng)控制對(duì)象的慣性參數(shù)不確定性。另一方面用于在軌裝配的機(jī)器人通常為帶有機(jī)械臂的獨(dú)立航天器。雖然這類航天器可以在進(jìn)入太空前完成系統(tǒng)參數(shù)的標(biāo)定,但隨著在軌裝配的進(jìn)行,航天器燃料會(huì)逐漸消耗、目標(biāo)桁架會(huì)被釋放,機(jī)器人系統(tǒng)的慣性參數(shù)會(huì)發(fā)生變化[15]。傳統(tǒng)的基于機(jī)器人與被操作對(duì)象模型的控制方法未將其考慮在內(nèi),導(dǎo)致對(duì)準(zhǔn)精度不高甚至是對(duì)準(zhǔn)失敗的問題。滑模控制憑借其快速響應(yīng)、對(duì)參數(shù)變化及擾動(dòng)不靈敏、無需系統(tǒng)在線辨識(shí)及物理實(shí)現(xiàn)簡(jiǎn)單等優(yōu)點(diǎn)被廣泛應(yīng)用于參數(shù)未定的機(jī)器人控制領(lǐng)域[16]。對(duì)于在軌裝配的無標(biāo)定視覺伺服系統(tǒng)而言,最為直接的思路就是將滑模控制方法擴(kuò)展到無標(biāo)定視覺伺服控制中。但圖像特征點(diǎn)的深度信息以倒數(shù)形式非線性的呈現(xiàn)在圖像雅可比矩陣中,無法滿足滑模控制中對(duì)未知參數(shù)線性化表述的要求。
國(guó)內(nèi)外學(xué)者針對(duì)參數(shù)不定的無標(biāo)定視覺伺服展開了研究:Cheah等[17]研究了當(dāng)特征點(diǎn)的深度信息保持不變時(shí),用于描述機(jī)器人關(guān)節(jié)空間與圖像空間的系統(tǒng)模型可以使用未知參數(shù)進(jìn)行線性化描述,這為自適應(yīng)控制用于無標(biāo)定動(dòng)力學(xué)視覺伺服提供了有力的理論支撐;在此基礎(chǔ)上,Cheah等[18]最早對(duì)無標(biāo)定視覺伺服進(jìn)行了研究,在目標(biāo)深度信息緩慢變化時(shí)實(shí)現(xiàn)無標(biāo)定視覺伺服,但該方法雅可比矩陣自適應(yīng)估計(jì)通常需要假設(shè)深度信息為固定值或者是緩變值,以便于未知變量的線性參數(shù)化與自適應(yīng)律對(duì)這些變量進(jìn)行在線估計(jì)。Santamaria等[19]將相機(jī)焦距與深度信息的比值作為參數(shù),并利用PnP(Perspective-n-Point)算法,對(duì)該比值進(jìn)行在線估計(jì),在相機(jī)光軸位置與垂直度弱假設(shè)的條件下,該方法可以對(duì)雅可比進(jìn)行較好的近似,在無人機(jī)的垂直起降控制中體現(xiàn)出良好的性能。Cheah等[20]對(duì)具有運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)不確定性的機(jī)器人設(shè)計(jì)了基于自適應(yīng)算法的混合力位控制器,實(shí)現(xiàn)對(duì)未定參數(shù)的在線估計(jì),保證了機(jī)器人雅可比矩陣在一定范圍內(nèi)變化時(shí)系統(tǒng)仍然是穩(wěn)定的,但該方法需要經(jīng)過復(fù)雜的參數(shù)估計(jì),耗時(shí)長(zhǎng),無法滿足大型空間結(jié)構(gòu)的快速裝配。Liu等[21]提出了深度雅可比矩陣,該深度雅可比矩陣單獨(dú)提取與深度信息相關(guān)的項(xiàng)作為一個(gè)比例項(xiàng),矩陣中不包含深度信息,使得未知參數(shù)線性的出現(xiàn)在機(jī)器人閉環(huán)動(dòng)力學(xué)系統(tǒng)中;Liang等[22]在此基礎(chǔ)上引入了自適應(yīng)控制方法,由于無法獲取深度參數(shù)的精確值,只能利用估計(jì)值進(jìn)行代替,但是此方法無法從理論上保證系統(tǒng)的漸進(jìn)性和穩(wěn)定性。
綜上所述,提出的機(jī)器人在軌裝配無標(biāo)定視覺伺服對(duì)準(zhǔn)方法,在傳統(tǒng)的無標(biāo)定視覺伺服基礎(chǔ)上,設(shè)計(jì)了深度估計(jì)器,滿足了滑模控制對(duì)未知參數(shù)線性化要求,從而引入滑模控制方法實(shí)現(xiàn)對(duì)機(jī)器人運(yùn)動(dòng)狀態(tài)的控制,解決了機(jī)器人及負(fù)載慣性參數(shù)不定導(dǎo)致對(duì)準(zhǔn)精度低的問題,使系統(tǒng)能夠在復(fù)雜的太空環(huán)境下完成在軌裝配任務(wù)。
1 伺服系統(tǒng)原理
圖像雅可比矩陣描述機(jī)器人關(guān)節(jié)運(yùn)動(dòng)與圖像特征變化關(guān)系,是研究無標(biāo)定視覺伺服對(duì)準(zhǔn)系統(tǒng)的基礎(chǔ)。而圖像雅可比矩陣存在高度非線性,從簡(jiǎn)化的角度可以將其視為一系列局部范圍內(nèi)非線性關(guān)系的線性近似。圖像雅可比矩陣的在線辨識(shí)的準(zhǔn)確性將直接影響到控制系統(tǒng)性能的好壞。因此,本節(jié)將簡(jiǎn)單介紹圖像雅可比矩陣的推導(dǎo)并選用卡爾曼濾波法完成在線辨識(shí)。
1.1 圖像雅可比矩陣推導(dǎo)
采用針孔相機(jī)模型來描述所研究相機(jī)。假設(shè)空間中任意一點(diǎn)P在相機(jī)坐標(biāo)系Tc中的坐標(biāo)為(x,y,z),即P=[xyz]T。點(diǎn)P在圖像平面的投影在圖像坐標(biāo)系Ti下表示為Pi,即Pi=[uv0]T,則有
(1)
式中:λ為相機(jī)的焦距。定義相機(jī)相對(duì)于世界坐標(biāo)系Tg的線速度和角速度分別為v=[vxvyvz]T和ω=[ωxωyωz]T,則空間點(diǎn)P相對(duì)于相機(jī)坐標(biāo)系Tc的相對(duì)速度為
(2)
聯(lián)立式(1)和式(2)可得

(3)
式(3)反映了單個(gè)特征點(diǎn)圖像空間到操作空間的映射關(guān)系,設(shè)
Jfi=
(4)
式中:Jfi為單個(gè)特征點(diǎn)的圖像雅可比矩陣,其值與相機(jī)的有效焦點(diǎn)長(zhǎng)度λ以及目標(biāo)深度信息z有關(guān)。則式(3)可以寫為
(5)
式中:fi是某一特征點(diǎn)的2維圖像特征矢量;r為相機(jī)在任務(wù)空間中的坐標(biāo)參數(shù)。
若擴(kuò)展到m個(gè)特征點(diǎn)可得
(6)
式中:Jf為狹義圖像雅可比矩陣,f1,f2,…,fm代表m個(gè)特征點(diǎn)的2維圖像特征矢量。
建立機(jī)器人運(yùn)動(dòng)學(xué)方程,即
(7)

聯(lián)立式(6)和式(7)可得描述關(guān)節(jié)運(yùn)動(dòng)與圖像特征變化關(guān)系為
(8)
式中:J為圖像雅可比矩陣;n為機(jī)器人自由度數(shù)。
1.2 圖像雅可比矩陣在線辨識(shí)
無標(biāo)定視覺伺服系統(tǒng)的好壞很大程度上取決于圖像雅可比矩陣在線辨識(shí)的準(zhǔn)確度。因?yàn)樵谡麄€(gè)任務(wù)空間中,圖像雅可比矩陣的變化是相當(dāng)明顯的,如果不能實(shí)現(xiàn)在線辨識(shí),將無法保證圖像反饋控制器的性能,甚至使系統(tǒng)出現(xiàn)振蕩。卡爾曼濾波方法是一種誤差方差最小的狀態(tài)估計(jì)方法,普遍應(yīng)用于實(shí)時(shí)狀態(tài)估計(jì)、系統(tǒng)參數(shù)辨識(shí)和目標(biāo)跟蹤領(lǐng)域。相比于其他方法,卡爾曼濾波對(duì)圖像雅可比的在線辨識(shí)具有更高的魯棒性和抗干擾能力,是目前常用的方法之一。
將式(6)離散化可得
f(k+1)≈f(k)+J(r(k))Δr(k)
(9)
式中:k為連續(xù)過程的離散點(diǎn);Δr(k)為相鄰兩個(gè)離散時(shí)間點(diǎn)之間相機(jī)坐標(biāo)參數(shù)變化。
定義mn×1維觀測(cè)矢量
(10)

定義圖像雅可比矩陣的觀測(cè)矢量x(k)為系統(tǒng)狀態(tài),機(jī)器人運(yùn)動(dòng)引起的圖像特征變化為系統(tǒng)輸出,即y(k)=f(k+1)-f(k)。建立系統(tǒng)狀態(tài)方程
(11)
式中:C(k)狀態(tài)變量到觀測(cè)矢量的轉(zhuǎn)換矩陣;η(k)、v(k)分別為狀態(tài)噪聲和圖像觀察噪聲。
由此可建立基于卡爾曼濾波方法的圖像雅可比矩陣的在線辨識(shí)遞推方程
(12)

2 深度估計(jì)器設(shè)計(jì)
空間在軌裝配過程中,伺服對(duì)準(zhǔn)操作一般發(fā)生在粗對(duì)準(zhǔn)之后,此時(shí)目標(biāo)桁架與對(duì)應(yīng)的接口距離較近,接口特征所在平面與相機(jī)成像平面基本平行,但是接口特征的深度信息未知。傳統(tǒng)的深度信息估計(jì)方法有單目深度估計(jì)法和雙目深度估計(jì)法。其中,單目深度估計(jì)法算法復(fù)雜、耗時(shí)長(zhǎng)、實(shí)時(shí)性差、易受環(huán)境影響、估計(jì)精度難以保證。而雙目深度估計(jì)法兩個(gè)相機(jī)的位置距離限制了深度數(shù)據(jù)的獲取,且機(jī)器人運(yùn)動(dòng)引起的抖動(dòng)等不穩(wěn)定因素使得兩個(gè)相機(jī)的對(duì)齊困難。因此本小節(jié)在圖像雅克比矩陣的基礎(chǔ)上,利用最小二乘法設(shè)計(jì)深度估計(jì)器,通過對(duì)機(jī)器人和圖像運(yùn)動(dòng)的測(cè)量數(shù)據(jù)來在線估計(jì)目標(biāo)特征的深度值。所設(shè)計(jì)的深度估計(jì)器簡(jiǎn)單易行,只與特征提取精度相關(guān),不受安裝位置與機(jī)器人運(yùn)動(dòng)的影響,且估計(jì)精度可以滿足對(duì)準(zhǔn)需求。
根據(jù)式(4)建立的單個(gè)特征點(diǎn)圖像空間到操作空間的映射關(guān)系,可得圖像雅可比矩陣的前三列與目標(biāo)特征點(diǎn)的深度值有關(guān),重新整理可得
(13)
式中:Jt為相機(jī)平移運(yùn)動(dòng)對(duì)圖像特征矢量的影響;Jw為相機(jī)旋轉(zhuǎn)運(yùn)動(dòng)對(duì)圖像特征矢量的影響。
將式(13)重新整理為
(14)
式(14)的右側(cè)是觀察到的光流減去由于相機(jī)旋轉(zhuǎn)產(chǎn)生的光流。相減得到的剩余光流即為相機(jī)平移所導(dǎo)致的光流。將式(14)整理為緊湊的線性方程
Aθ=b
(15)
利用最小二乘法對(duì)上式中的目標(biāo)特征深度值求解得
(16)
基于式(16)利用對(duì)圖像雅可比矩陣的在線辨識(shí)結(jié)果可以實(shí)現(xiàn)對(duì)圖像特征點(diǎn)深度信息的估計(jì)。在已知深度信息的基礎(chǔ)上,則可以為引入滑模控制方法實(shí)現(xiàn)對(duì)動(dòng)力學(xué)參數(shù)和負(fù)載參數(shù)未定情況下機(jī)器人關(guān)節(jié)的自適應(yīng)控制提供基礎(chǔ)。
3 視覺伺服滑模控制
基于前面兩小節(jié)所研究?jī)?nèi)容,根據(jù)特征點(diǎn)的期望特征矢量即可得到機(jī)器人運(yùn)動(dòng)的期望關(guān)節(jié)角。從控制的角度來看,純運(yùn)動(dòng)學(xué)的控制由于忽略了機(jī)器人的非線性動(dòng)力學(xué)特性,很難保證機(jī)器人控制動(dòng)力學(xué)性能與穩(wěn)定性,無法滿足柔順裝配的要求。此外考慮到在軌裝配過程中機(jī)器人與被操作物慣性參數(shù)不定的特點(diǎn),傳統(tǒng)的控制方法未將其考慮在內(nèi),可能導(dǎo)致對(duì)準(zhǔn)精度差甚至是對(duì)準(zhǔn)失敗的問題。而滑模控制具有響應(yīng)速度快、抗干擾能力強(qiáng)的特點(diǎn),因此本小節(jié)設(shè)計(jì)視覺伺服的滑模控制器,能夠有效克服機(jī)器人運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)參數(shù)不確定性和負(fù)載慣性參數(shù)不定帶來的干擾,保證機(jī)器人快速有效的完成伺服對(duì)準(zhǔn)。
在軌裝配機(jī)器人動(dòng)力學(xué)模型
(17)
式中:H(q)為正定質(zhì)量慣性矩陣;C(q)為科氏力與離心力項(xiàng);τ為機(jī)器人關(guān)節(jié)力矩;Fe為機(jī)器人進(jìn)行在軌裝配操作時(shí)末端輸出力。
當(dāng)不知道機(jī)器人的慣性參數(shù)以及末端輸出力的大小時(shí),根據(jù)計(jì)算力矩法,取控制律為
(18)

(19)
即
(20)

(21)
定義
(22)

定義滑模控制的滑模面為
(23)

(24)
取
(25)
式中:d為待設(shè)計(jì)的向量,則
(26)
選取

(27)
式中:η為正定矩陣。則


(28)
由此可以證明,整個(gè)控制系統(tǒng)可以從任意初始狀態(tài)趨向滑模面,滿足滑模可達(dá)性。
由式(18)和式(25)得無標(biāo)定視覺伺服滑模控制律為
(29)

4 無標(biāo)定視覺伺服系統(tǒng)
搭建在軌裝配機(jī)器人的無標(biāo)定閉環(huán)伺服控制系統(tǒng):以桁架接口的期望圖像特征與圖像處理所獲得實(shí)際特征作為控制系統(tǒng)的輸入,利用深度估計(jì)器獲取當(dāng)前目標(biāo)特征點(diǎn)的深度信息,完成圖像雅可比矩陣的在線辨識(shí)。在此基礎(chǔ)上得到下一時(shí)刻機(jī)器人期望的關(guān)節(jié)運(yùn)動(dòng),將其輸入到視覺伺服系統(tǒng)滑模控制器中以驅(qū)動(dòng)機(jī)器人運(yùn)動(dòng)。搭載在機(jī)器人末端的相機(jī)再將得到的圖像信息反饋回伺服控制系統(tǒng),與期望圖像特征作對(duì)比指導(dǎo)機(jī)器人完成桁架的跟蹤對(duì)準(zhǔn)。整個(gè)控制系統(tǒng)框圖如圖1所示。
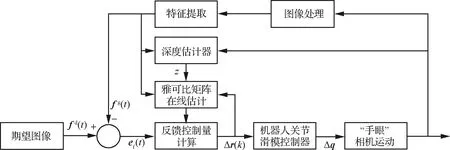
圖1 無標(biāo)定伺服控制系統(tǒng)框圖
定義無標(biāo)定視覺伺服對(duì)準(zhǔn)系統(tǒng)誤差為
ef(t)=fd(t)-fg(t)
(30)
(31)
將控制量離散化,得到k時(shí)刻最優(yōu)控制量為
u(k)=Δr(k+1)=r(k+1)-r(k)
(32)
式中:r(k)為k時(shí)刻相機(jī)在任務(wù)空間內(nèi)的坐標(biāo)參數(shù)。
為消除系統(tǒng)跟蹤靜差,同時(shí)克服圖像處理時(shí)延對(duì)桁架跟蹤對(duì)準(zhǔn)性能的影響,引入PI控制策略
(33)
式中:cp、ci分別為PI控制器的比例和積分系數(shù)。
5 仿真校驗(yàn)
為了驗(yàn)證所提出的機(jī)器人在軌裝配無標(biāo)定視覺伺服對(duì)準(zhǔn)方法的正確性,利用MATLAB軟件對(duì)其進(jìn)行仿真驗(yàn)證。通過2組不同深度信息下特征點(diǎn)在圖像空間的運(yùn)動(dòng)軌跡與所提方法的仿真結(jié)果作對(duì)比,驗(yàn)證深度估計(jì)器的有效性。接著,通過在機(jī)器人系統(tǒng)和被操作物慣性參數(shù)不定情況下對(duì)引入滑模控制與未引入滑模控制作對(duì)比,驗(yàn)證引入滑模控制后對(duì)控制精度和控制性能的提升。仿真所用為6自由度機(jī)器人,DH參數(shù)如表1所示。
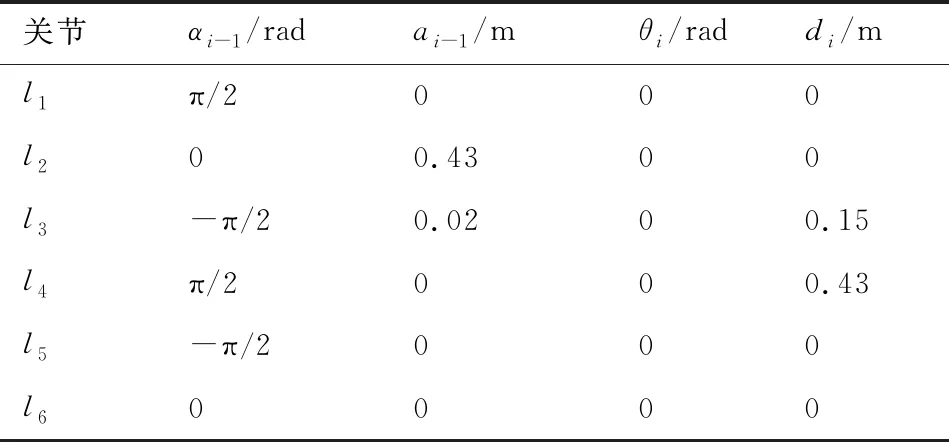
表1 機(jī)器人DH參數(shù)


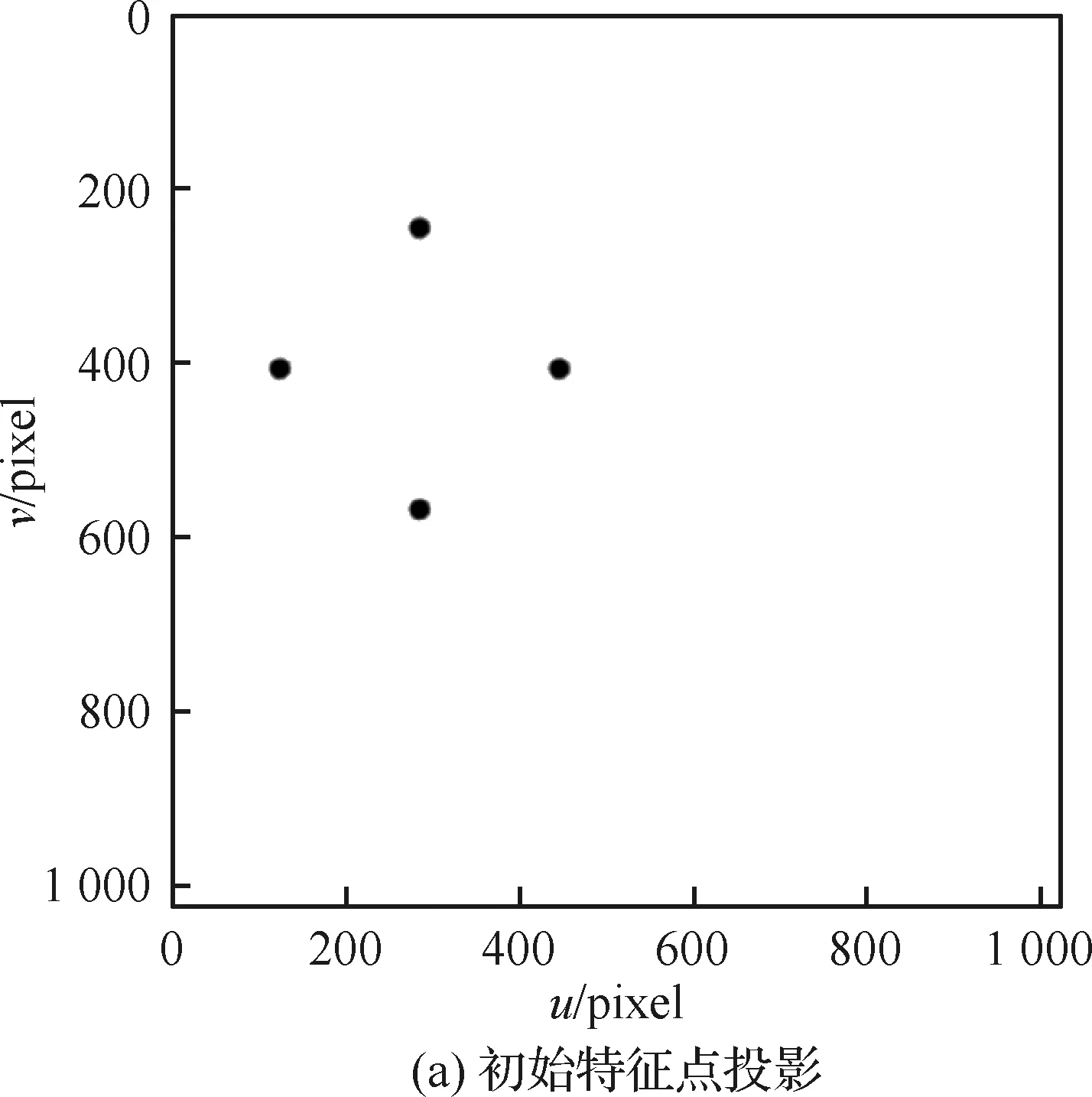
圖2 特征點(diǎn)投影變化情況
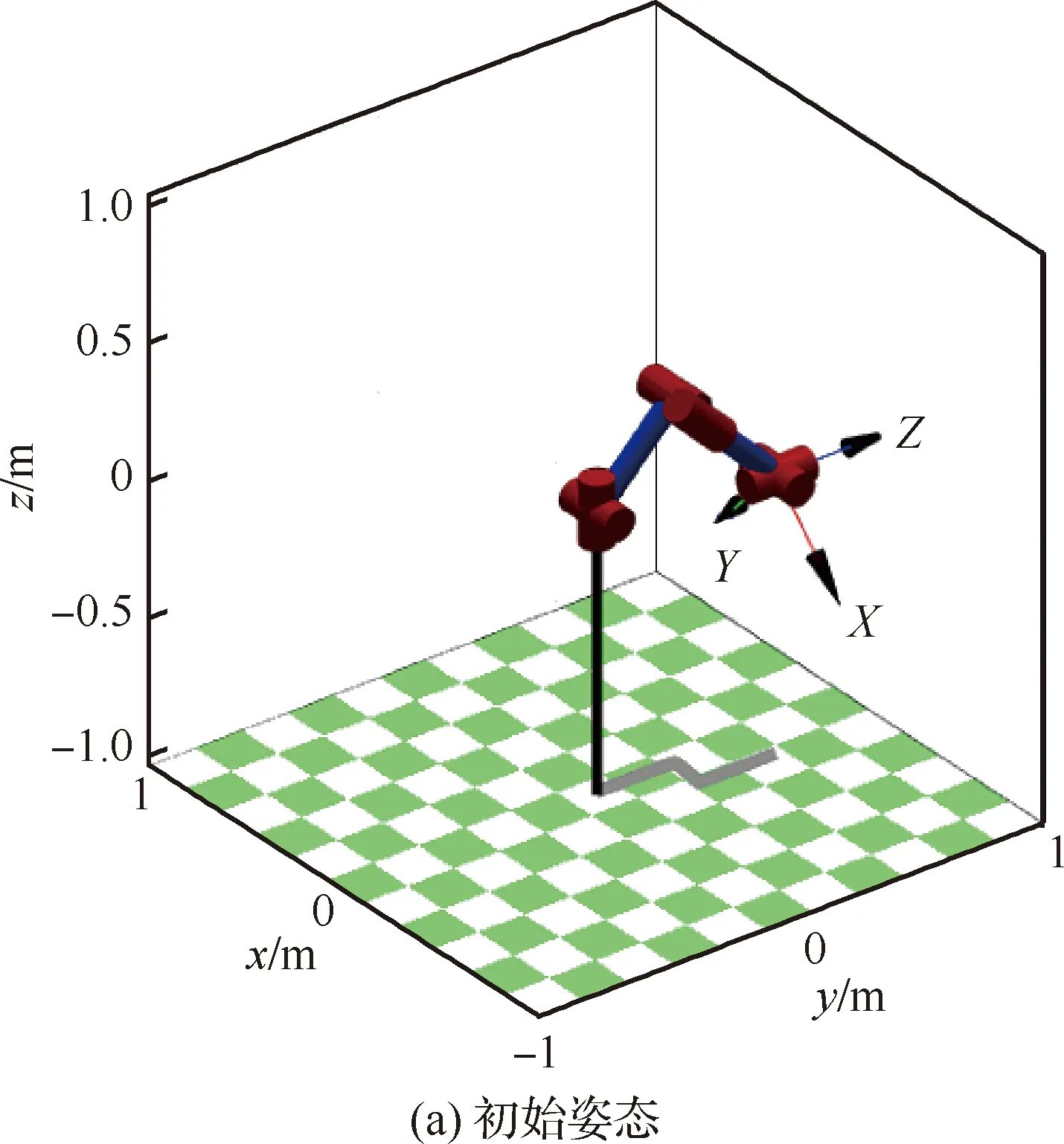
圖3 機(jī)器人姿態(tài)變化情況
下面將通過2組不同深度信息下特征點(diǎn)的運(yùn)動(dòng)軌跡與所提方法作對(duì)比:圖4(a)為采用所設(shè)計(jì)的伺服對(duì)準(zhǔn)控制方法得到的接口特征點(diǎn)的運(yùn)動(dòng)軌跡圖;圖4(b)和圖4(c)分別為假設(shè)深度信息z=1 m和z=10 m其他條件相同時(shí)得到的接口特征點(diǎn)的運(yùn)動(dòng)軌跡圖。
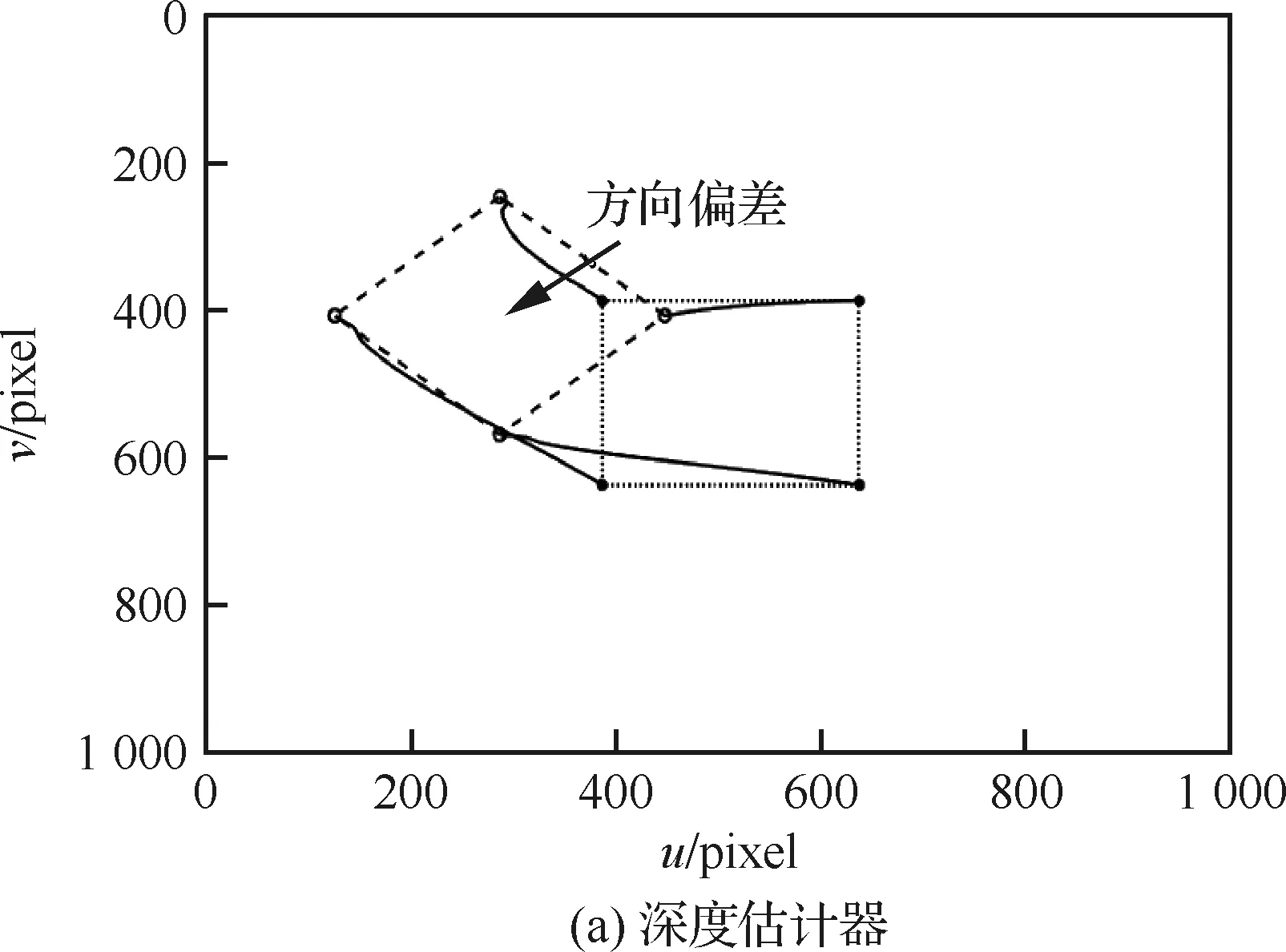
圖4 不同情況下特征點(diǎn)在圖像空間的運(yùn)動(dòng)軌跡
通過對(duì)比可以看出:采用所設(shè)計(jì)的伺服對(duì)準(zhǔn)控制方法得到的特征點(diǎn)運(yùn)動(dòng)軌跡收斂速度快、運(yùn)動(dòng)過程平滑、運(yùn)動(dòng)距離最優(yōu),特征點(diǎn)在圖像空間的運(yùn)動(dòng)軌跡明顯優(yōu)于其他兩種情況。尤其是z=10 m時(shí)的運(yùn)動(dòng)軌跡收斂速度很慢且不再是直線。這是因?yàn)樵撉闆r下圖像雅可比矩陣無法很好的近似相機(jī)運(yùn)動(dòng)與圖像特征點(diǎn)運(yùn)動(dòng)之間的關(guān)系,在相機(jī)指引下的機(jī)器人每步運(yùn)動(dòng)誤差都較大,因此特征點(diǎn)的運(yùn)動(dòng)軌跡形成了一個(gè)鋸齒狀的路徑。而z=1 m時(shí)的運(yùn)動(dòng)軌跡明顯要比z=10 m時(shí)的好,這是因?yàn)橄啾扔趯?shí)際深度信息(z=1.3 m)z=1 m比z=10 m的誤差更小,更接近于實(shí)際深度,因此收斂性要更好。
圖5為各個(gè)接口特征點(diǎn)的實(shí)際深度信息與估計(jì)深度信息的變化曲線。從圖中可以看出,估計(jì)深度在4 s內(nèi)迅速上升,然后跟蹤到實(shí)際目標(biāo)的深度,之后就能在控制器收斂過程中準(zhǔn)確跟蹤真實(shí)深度。由于初始階段深度信息估計(jì)值與實(shí)際值相差較大,此時(shí)圖像雅可比矩陣不能很好的表示相機(jī)運(yùn)動(dòng)與圖像特征點(diǎn)運(yùn)動(dòng)之間的關(guān)系,從運(yùn)動(dòng)軌跡圖可以看出特征點(diǎn)的運(yùn)動(dòng)方向是有偏差的。
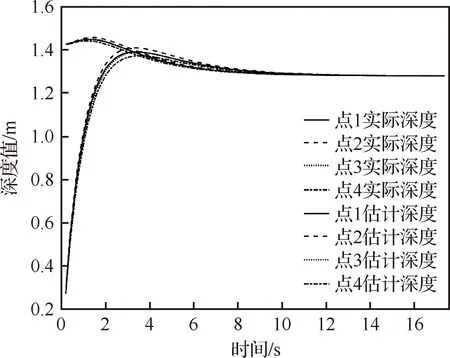
圖5 深度估計(jì)值與真實(shí)值對(duì)比
下面將通過在機(jī)器人系統(tǒng)和被操作物慣性參數(shù)不定情況下對(duì)引入滑模控制與未引入作對(duì)比: 圖6(a)為機(jī)器人與負(fù)載參數(shù)未定時(shí)采用引入滑模控制方法得到的特征點(diǎn)運(yùn)動(dòng)誤差圖;圖6(b)則為未引入滑模控制得到的特征點(diǎn)的運(yùn)動(dòng)誤差圖。通過對(duì)比兩圖可以看出:引入滑模控制后特征點(diǎn)的圖像誤差在5 s內(nèi)迅速趨于0,在8 s時(shí)所有誤差都穩(wěn)定在0附近。最終的特征點(diǎn)誤差數(shù)量級(jí)為10-8pixel。而傳統(tǒng)的控制方法會(huì)導(dǎo)致接口4個(gè)特征點(diǎn)產(chǎn)生較大偏差,峰值的誤差為127 pixel遠(yuǎn)大于所設(shè)計(jì)控制方法的峰值誤差。在8 s時(shí)各特征點(diǎn)基本可以實(shí)現(xiàn)穩(wěn)定跟蹤,但仍存在2 pixel誤差。得益于無標(biāo)定視覺伺服閉環(huán)特性,最終在10 s時(shí)各個(gè)特征點(diǎn)的誤差都趨于0,但相比于所設(shè)計(jì)的控制方法收斂速度要慢的多。由此可以證明引入的視覺伺服滑模控制器能實(shí)現(xiàn)在軌裝配中對(duì)接口目標(biāo)的快速穩(wěn)定的對(duì)準(zhǔn)跟蹤。
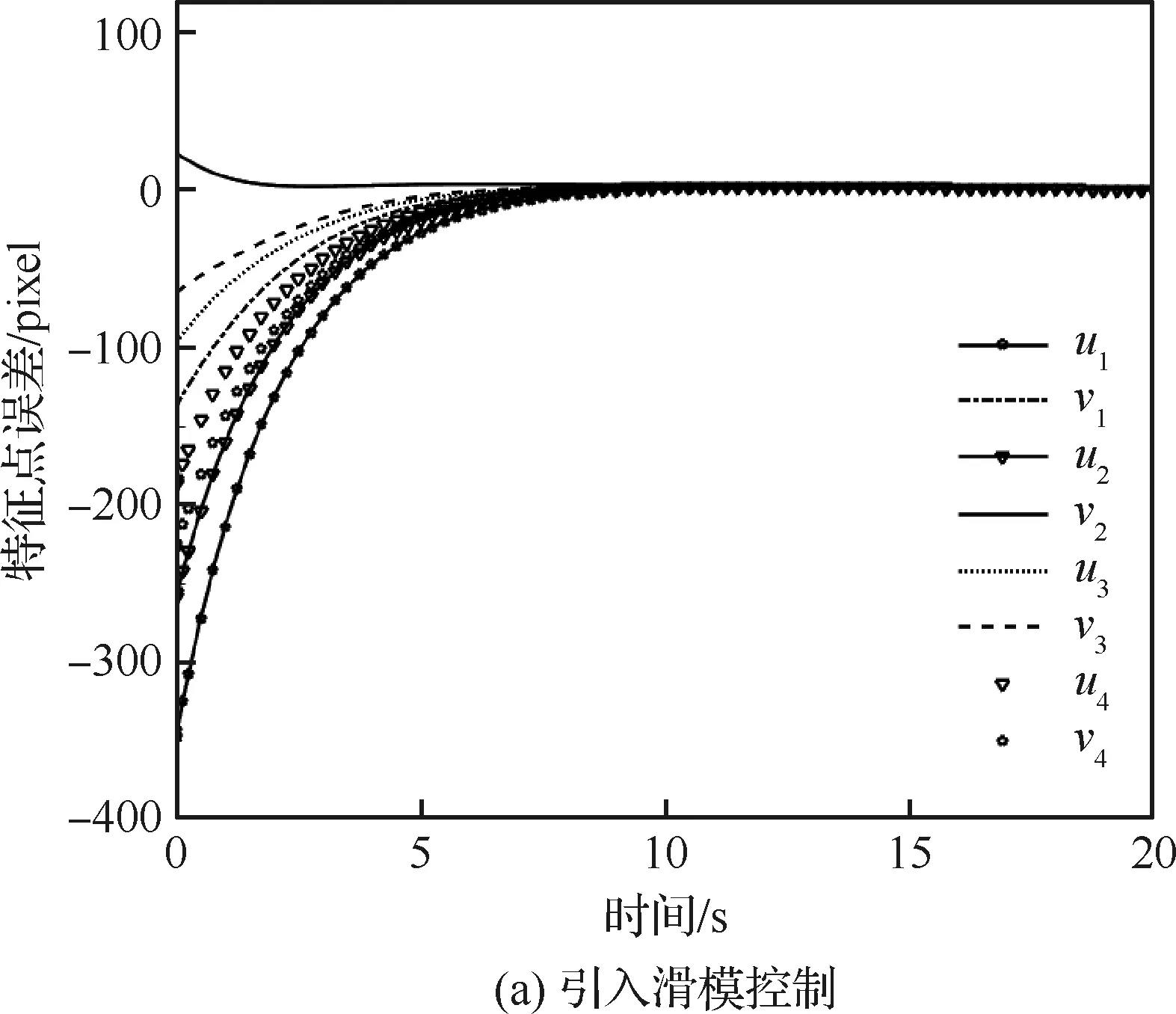
圖6 引入滑模控制的誤差對(duì)比
6 結(jié) 論
1) 設(shè)計(jì)了目標(biāo)特征的深度估計(jì)器,使用對(duì)機(jī)器人和圖像運(yùn)動(dòng)的測(cè)量數(shù)據(jù)在線估計(jì)目標(biāo)特征深度值。
2) 引入視覺伺服滑模控制方法,選取圖像特征作為輸入,各關(guān)節(jié)速度為輸出,通過閉環(huán)反饋調(diào)節(jié),實(shí)現(xiàn)在軌裝配中對(duì)桁架的對(duì)準(zhǔn)跟蹤,并通過仿真實(shí)驗(yàn)對(duì)控制策略的可行性和有效性進(jìn)行了驗(yàn)證。
利用所提方法可以免去復(fù)雜的標(biāo)定過程,同時(shí)克服了機(jī)器人與被操作物慣性參數(shù)不確定性因素給控制系統(tǒng)帶來的影響,保證機(jī)器人快速有效的完成桁架的在軌裝配對(duì)準(zhǔn)。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
