基于微控制器的智能車系統外圍電路設計
2021-07-07 03:57:42葛文杰儲沈悅郝雅敬
黑龍江科學 2021年12期
葛文杰,儲沈悅,郝雅敬
(南通大學,江蘇 南通 226000)
0 引言
智能車硬件電路可分為三部分,即電源管理電路、傳感器電路和驅動電路。電源管理電路為整個智能車系統提供其運行必需的能源,電池電壓通過一系列穩壓電路產生5 V、3.3 V等電壓供傳感器等外圍部件使用。傳感器電路包括運算放大電路、濾波電路等。驅動電路則通過接收來自MCU的控制信號,來控制智能車系統的執行部件,如電機、舵機等。電路設計既要考慮各自內部存在的問題,也要綜合考慮電路之間的電平干擾。電路需經過嚴謹、全面的性能測試才能運用于以MCU微控制器為控制核心的智能車系統上,以提供安全可靠的硬件保障。
1 電源管理電路
1.1 電路功能確定
智能車系統中,許多傳感器的供電電壓需要5 V或3.3 V,一些器件則需要更高的工作電壓,如舵機,所以智能車系統的電源管理電路需要能夠提供5 V、3.3 V等電壓,其結構如圖1所示。電路除了提供基本的電壓外,還需要滿足其輸出電流大于系統各元件所需電流之和,其最大輸出功率能夠帶動所有部件正常工作,如使用帶有保護板的鋰電池供電,遇電機堵轉時,若超出電池保護板的最大輸出功率,則會導致系統復位。電源的紋波越小越好,紋波嚴重會導致地線電平不穩,其結果往往是系統突然復位。
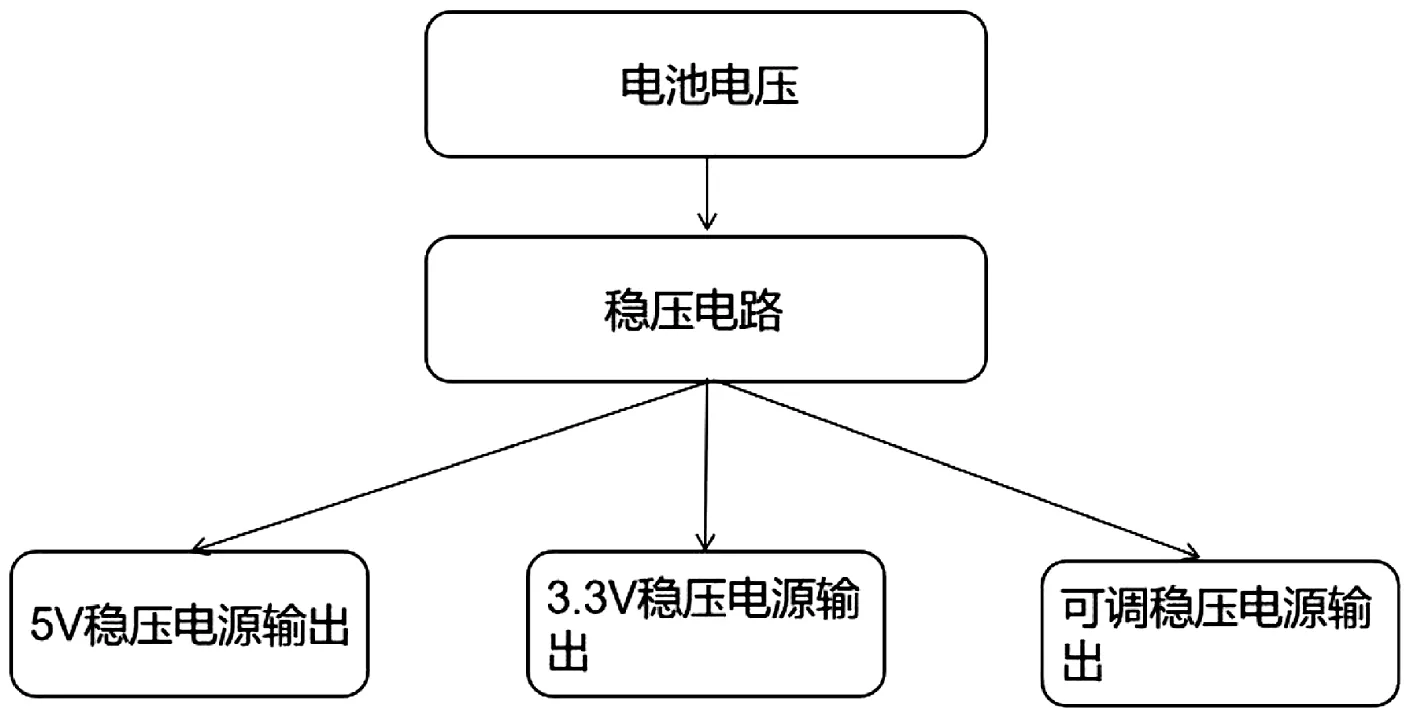
圖1 電源管理電路功能圖Fig.1 Power management circuit function diagram
1.2 穩壓電路設計
穩壓電路的核心部分由穩壓器件構成,具有穩壓功能的元器件有穩壓二極管、線性穩壓器(LDO)、開關穩壓器。智能車系統使用集成的IC芯片作為穩壓器件,線性穩壓器(LDO)是通過內部晶體管在其線性區工作來對輸入電壓進行調節。具有熱過載保護、限流、穩定性好等特點,缺點是功耗較大,功耗多以熱損耗的形式釋放,故使用線性穩壓器時需要很好地散熱處理。開關穩壓是通過輸出級不斷重復進行“開”“關”狀態,與存儲能量的部件,如電感電容一起產生輸出電壓,優點為功耗小、效率高、轉換速度快、濾波效率高,缺點為開關干擾較嚴重,電源紋波抑制性較線性穩壓器較差。
以線性穩壓器為例,列舉智能車系統中的穩壓電路,電路如圖2所示,電路由肖特基二極管SS54,電容C1、C2、C3、C4,電阻R1,LED,磁珠FB組成。肖特基二極管對電源VCCBAT具有整流作用,C1用于濾除電源干擾,C2濾除寄生振蕩,三者為線性穩壓器件提供穩定的電壓輸入。C3濾除輸出端的干擾,C4降低電源紋波,R1與LED組成指示燈電路。穩壓器正常工作時,LED將被點亮。磁珠用于連接電源地,進行分地處理,進一步減少來自電源的干擾,降低紋波。此電路具有紋波小、穩壓電源穩定性好等特點[1]。
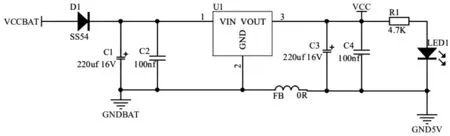
圖2 線性穩壓器通用電路Fig.2 General circuit of linear voltage regulator
線性穩壓器多為三端穩壓器件,故圖2的電路可使用多種三端穩壓器,最大輸出電流、功率由線性穩壓器本身的特性決定。線性穩壓器的選擇應滿足整個系統的電流與功率需求。
以線性穩壓器為例,列舉一可調穩壓電路的設計,如圖3所示。
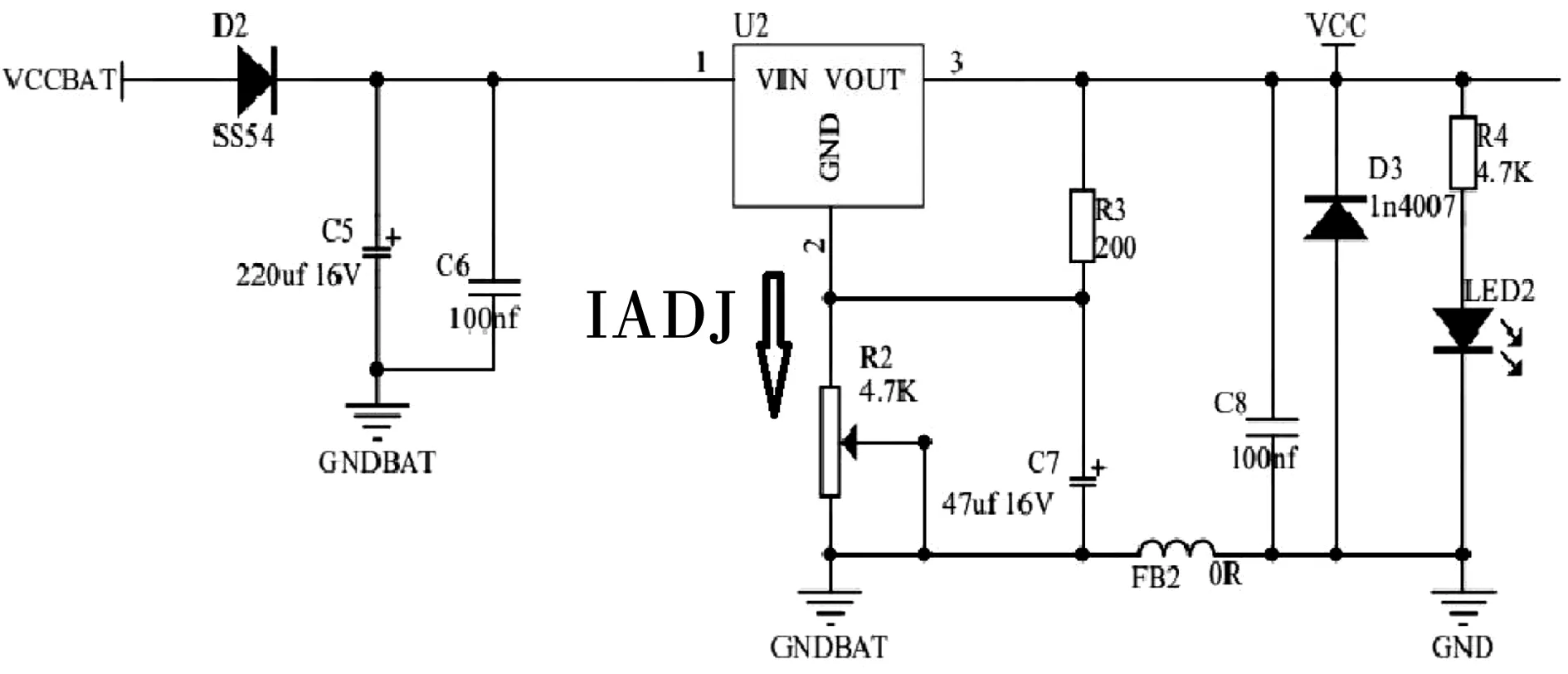
圖3 可調穩壓電路Fig.3 Adjustable voltage regulator circuit
根據基爾霍夫定律,穩壓電路的輸出電壓為:
該穩壓器的輸出電壓最小不小于穩壓器件的輸出電壓。即若使用5 V穩壓器件,則輸出電壓不會低于5 V。最大電壓輸出由穩壓器器件本身特性決定。可調穩壓常用于舵機電源的供給,調節舵機的供電電壓可以調節舵機的靈敏度,以適用不同場合。
1.3 電源過壓過流保護電路設計
經過穩壓電路的電壓輸出常為MCU等重要器件供電,若穩壓電路出現擊穿等故障時,就不再具有穩壓功能,輸出電壓往往超過一些元件的額定電壓,從而造成芯片損壞,系統失效。因此需要設計保護電路。保護電路包括過流保護、過壓保護,一種典型的電路如圖4所示,該電路本質上是由Q1、Q2三極管組成的開關電路。D1為穩壓二極管,電路通過D1、R1組成的采樣電路對VCC供電線電壓進行采樣,當VCC小于D1的穩壓值時,Q1基極被R2下拉,為低電平,此時Q1、Q2不導通,Q3為NMOS管,此時柵極為高電平,MOS管導通允許電壓輸出。當VCC輸出電壓高于D1管穩壓值時, D1導通,Q1三極管基極被拉高,Q1、Q2導通,Q3柵極被拉低,MOS管截止,關斷電壓輸出。
當電路過流或發生短路時,PPTC熱保護管升溫,迅速切斷VCC供給。
該電路可以實現過壓過流保護,具有關斷速度快、器件選擇要求低等優點,但存在影響穩壓輸出的缺點,原因是Q3 NMOS管處于穩壓輸出端。改進后的電路可以將Q3移至穩壓電路的輸入端,但相應的功耗也會增大。

圖4 電源保護電路1Fig.4 Power protection circuit 1
再提供一種基于繼電器的保護電路,如圖5所示。其中,繼電器控制端串接入R4、Q2回路,同時繼電器常閉端串接入電源線,1N4007為快速恢復二極管,其作用是保護繼電器不因關斷時突變的電流而損壞。與圖4電路相同,當過壓時,繼電器斷開,切斷回路。這種電路相較于圖4,優點為沒有來自MOS管的損耗,缺點為繼電器的關斷速度有限,在一定情況下可能無法保護一些脆弱器件,且增加了電路面積,在縱向增加了電路體積,增加了PCB的設計與固定難度。
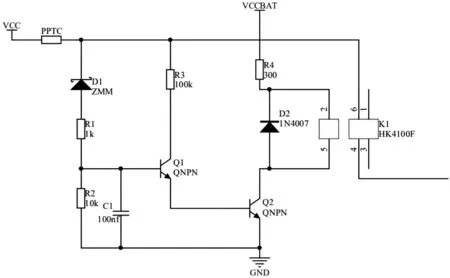
圖5 電源保護電路2Fig.5 Power protection circuit 2
1.4 穩壓電源擴流電路設計
在一些場合,當穩壓器的最大輸出電流不滿足器件所需的總電流之和時,需要進行擴流。因此提供一種較為簡單的擴流電路設計電路,如圖6所示。Q1三極管通過R5電阻進行采樣,對穩壓輸出端提供一定的電流補償。
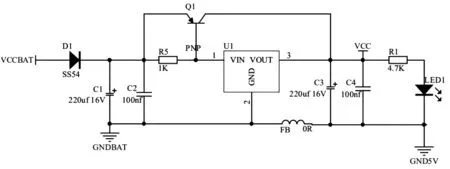
圖6 基于三極管的擴流電路Fig.6 Current expansion circuit based on triode
該擴流電路可以將原先1 A的穩壓電路輸出電流擴流至2 A,但是同樣也帶來了一個問題,即功耗問題,Q1三極管的功耗隨擴流急劇增加,故Q1三極管需要選擇大功率三極管。且擴流電路并不能改善穩壓的輸出性能,甚至會增加紋波,拉低穩壓的輸出性能。故在選擇擴流之前,應優先尋找是否有輸出電流更寬泛的穩壓器件,現在很多器件最大輸出電流達2 A以上,可滿足智能車系統需要。
2 傳感器電路
傳感器在智能車系統中起著至關重要的作用,傳感器的輸出通常有數字量、模擬量,但就傳感器件本身來說,多數為模擬量,如光敏電阻、熱敏電阻,可通過MCU系統的ADC通道直接采集,但ADC資源有限,在需要許多傳感器的場合中,ADC就不夠用,此時可將一些只需通過判斷閾值且閾值固定的傳感器通過硬件系統來判斷,只需IO口接收高低電平即可。另一些模擬量輸出則比較小,此時需要運算放大器來對信號進行放大。還有一些容易受到干擾的傳感器,如電磁類傳感器,可通過硬件濾波或軟件檢波來濾除干擾。
2.1 模擬量轉數字量電路
以LM393電壓比較器為例,給出一種具有三段閾值判斷功能的傳感器前置比較器電路,如圖7所示。該電路由LM393比較器構成。模擬量輸入端口為analog_in,各比較器的基準比較電壓由滑動變阻器提供,分別為VREF1、VREF2。
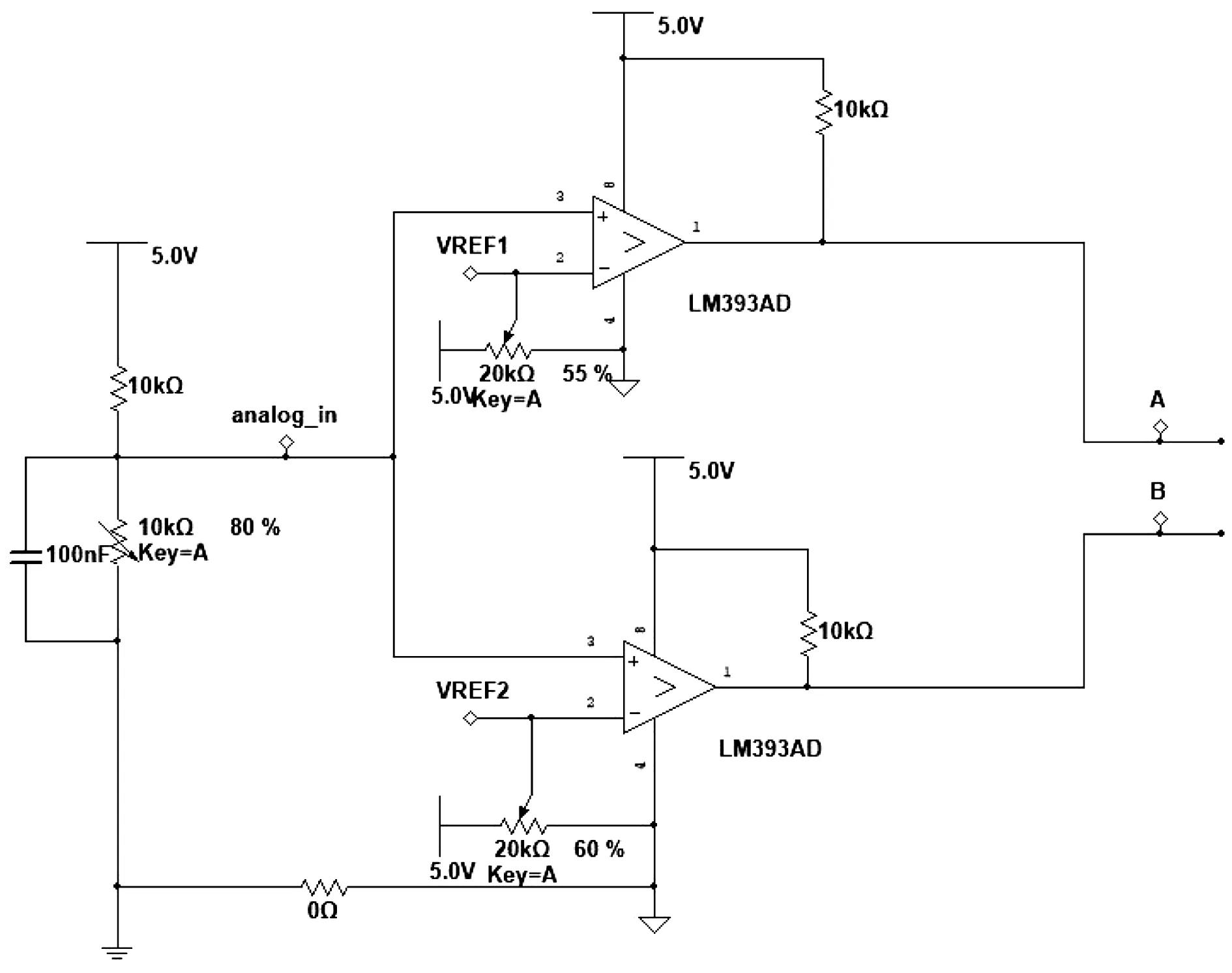
圖7 三段閾值比較器電路Fig.7 Three-segment threshold comparator circuit
當模擬量輸入端Vanalog_in電壓高于VREF1時,A端口輸出高電平,當其低于VREF1時,A端口輸出低電平。另一LM393D比較器工作原理相同。
當Vanalog_in>VVREF1>VVREF2時,A為高電平,B為高電平,當VVREF1>Vanalog_in>VVREF2時,A為低電平,B為高電平,當VVREF1>VVREF2>Vanalog_in時,A為低電平,B為低電平。因此MCU讀取AB口電平就能知道模擬量所處的閾值[2]。其功能如表1所示。
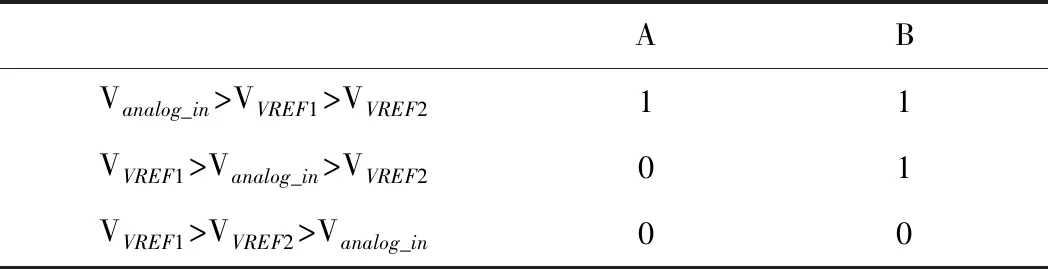
表1 閾值比較器輸出Tab.1 Threshold comparator output
2.2 模擬量放大電路
模擬量放大電路根據傳感器種類與系統要求不同,需要全面考慮噪聲、干擾等因素。列舉了幾種常用的模擬信號放大電路。
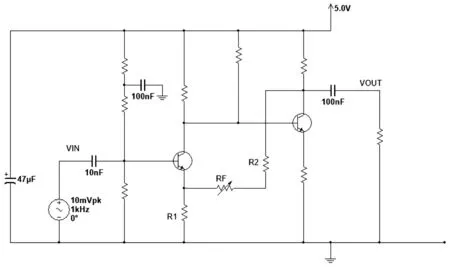
圖8 晶體管構成的放大電路Fig.8 Amplifying circuit composed of transistors
這種電路的優點為材料易得、造價便宜,但是其對噪音幾乎沒有抑制作用,干擾大、高頻特性差,且靜態工作點難以確定。故這種電路一般用于對信號要求較低的場合,如使用駐極麥克風檢測環境噪音。
現在有許多集成IC芯片不僅具有極高的共模噪音抑制,且大大簡化了電路,如OPA4377,OPA4377為TI公司的一款集成運放芯片,以OPA4377芯片為例,給出一種具有高增益、高共模抑制比的信號增益電路,如圖9所示。
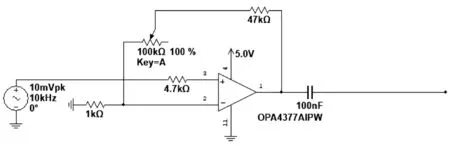
圖9 OPA4377運算放大器電路Fig.9 OPA4377 operational amplifier circuit
該電路輸出波形如圖10所示,為半波放大,波特圖如圖11,由圖可知,對于低頻、中頻、高頻信號都有不錯的增益,對信號的增益十分可觀。該電路可以運用于電感電容組成的選頻電路與周圍磁場諧振的信號放大,麥克風信號放大等微小信號放大的場合。
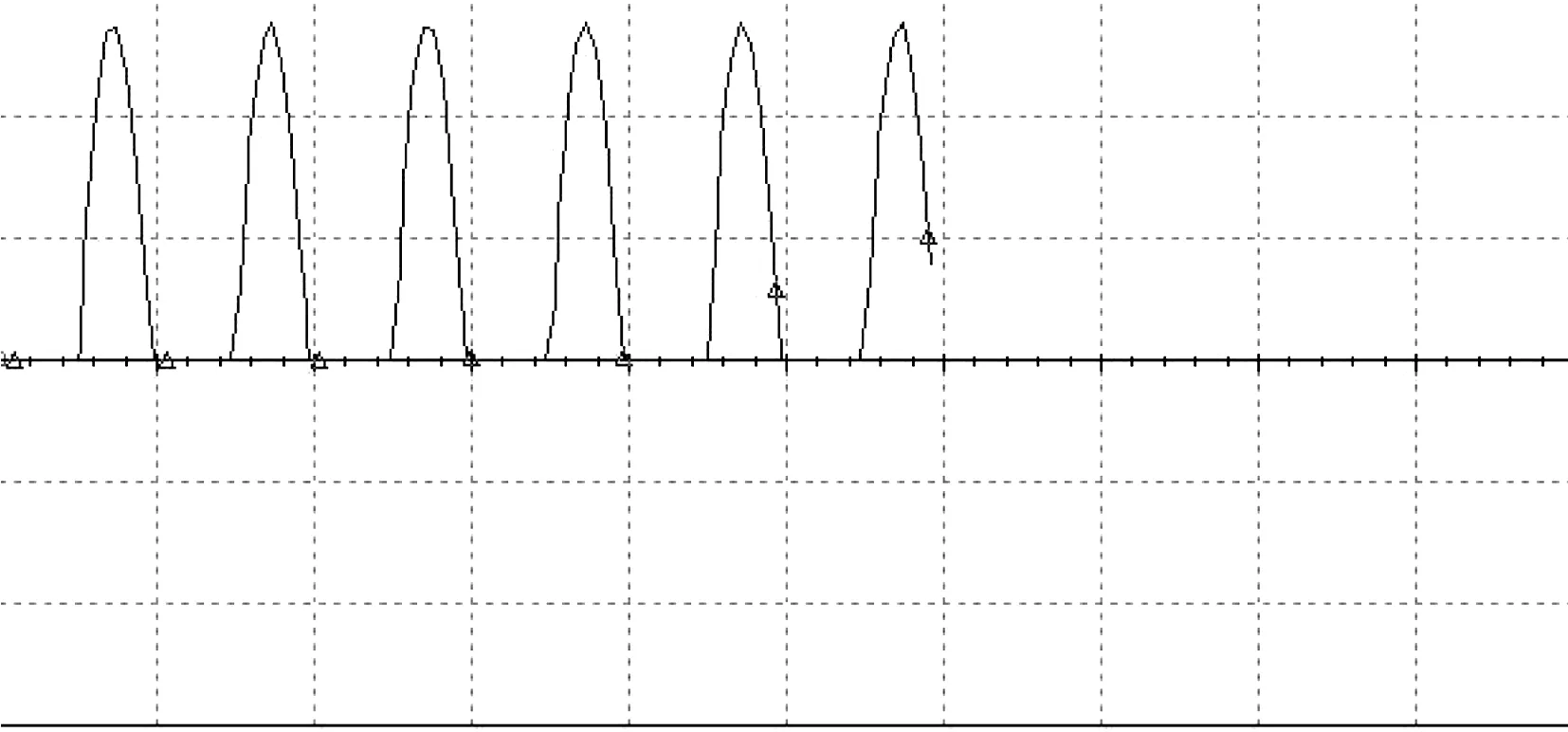
圖10 波形輸出圖Fig.10 Waveform output diagram
2.3 硬件濾波電路
硬件濾波電路分為有源濾波器和無源濾波器兩種。其各有優缺點,無源濾波器由于電感電容存在阻抗,所以功耗稍大,而有源濾波器的特性受到運算放大器的限制,超過其幅頻特性時,容易產生自激振蕩。圖12為無源濾波器的最簡電路圖。無源濾波器本質是為某種頻率構建一個低阻的通路,從而將該頻率信號濾除。
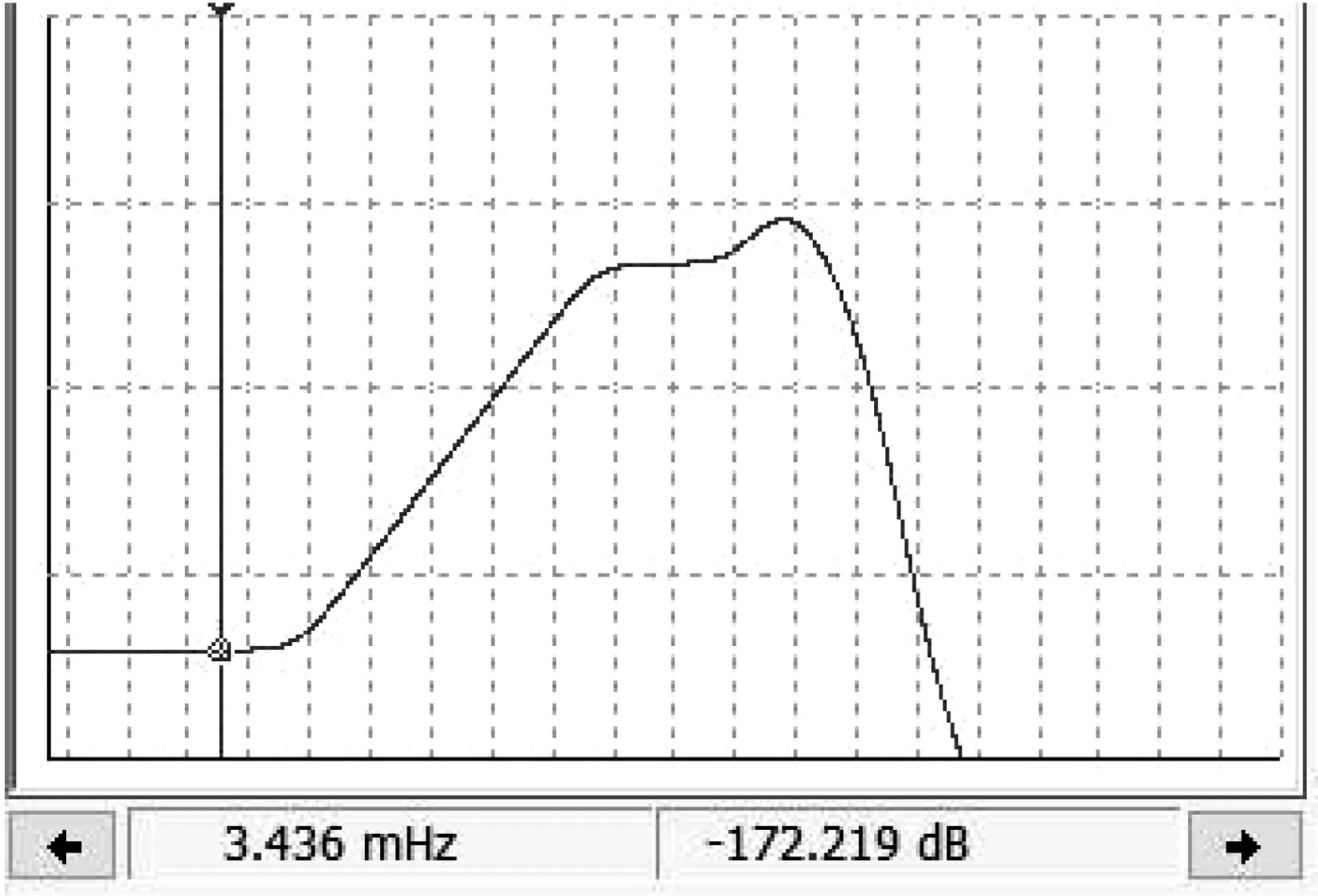
圖11 運放電路波特圖Fig.11 Baud diagram of op-amp circuit
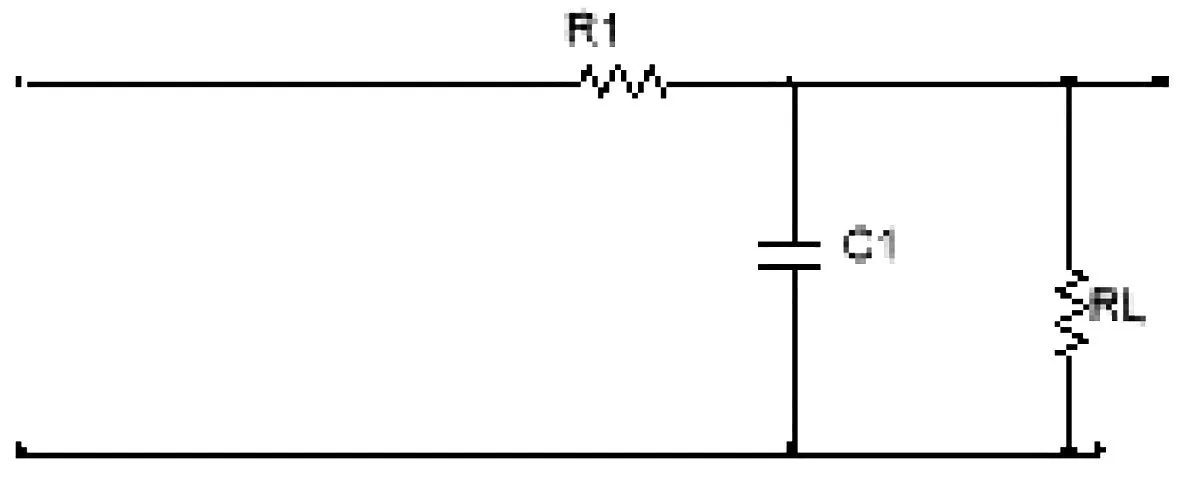
圖12 無源濾波器Fig.12 Passive filter
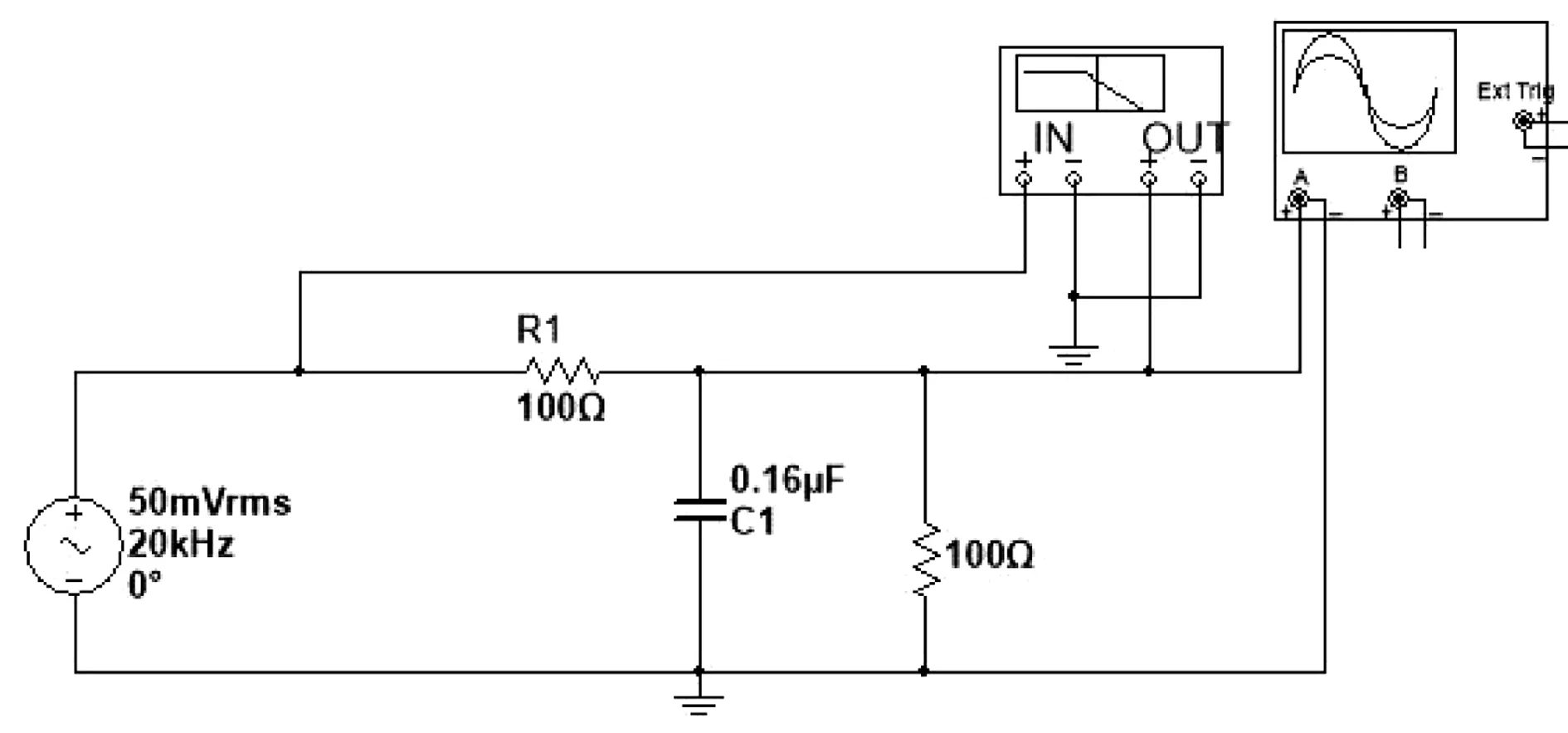
圖13 20 kHZ無源濾波器Fig.13 20 kHz passive filter

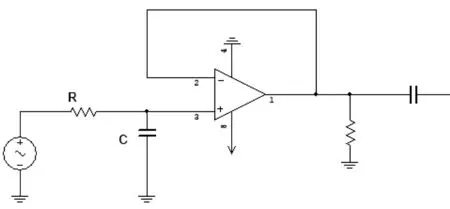
圖14 有源濾波器Fig.14 Active power filter
相對來說,無源濾波器所需硬件簡單,易實現,運行穩定,技術相對成熟,更加適合于智能車系統。但這并不代表有源濾波器無用武之地,在一些場合,無源濾波器需要的器件,如非常用阻值的電阻等較難獲得,此時可以將有源濾波器與無源濾波器相結合,實現濾波。
3 驅動電路
3.1 驅動電路組成的確定
驅動電路主要是用于驅動一些功率較大的器件。一般單片機I/O口所能提供的最大電流為10~20 mA,其所能提供的功率一般無法滿足電機、電磁鐵等用電器的工作功率。智能車中,一般會設置電機驅動電路,除此之外,為了防止電機在啟動或堵轉時產生倒灌大電流對單片機造成損害,在信號線處需設置相應的隔離電路。
3.2 驅動電路的設計
為了保證電機響應迅速,故選用直流電機,而直流電機的驅動電路最常用的為H橋式電路[4]。
H橋式電路是由四個MOS管或場效應管組成,如圖15所示,其中,V為電池電壓,智能車使用的電池電壓一般在7~12 V,Q1、Q2、Q3、Q4為MOS管或場效應管,MOTOR為直流電機,GND為電機驅動電路的地線。
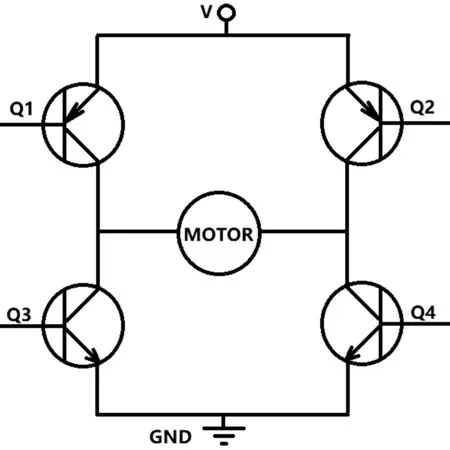
圖15 H橋電路1Fig.15 H bridge circuit 1
為了使圖15中的電機MOTOR順時針旋轉,需要Q1與Q4一起導通,同時保證Q2與Q3截止,如圖16所示。相反,要使電機MOTOR逆時針旋轉,需要Q2與Q3一起導通,同時保證Q1與Q4截止,如圖17所示。
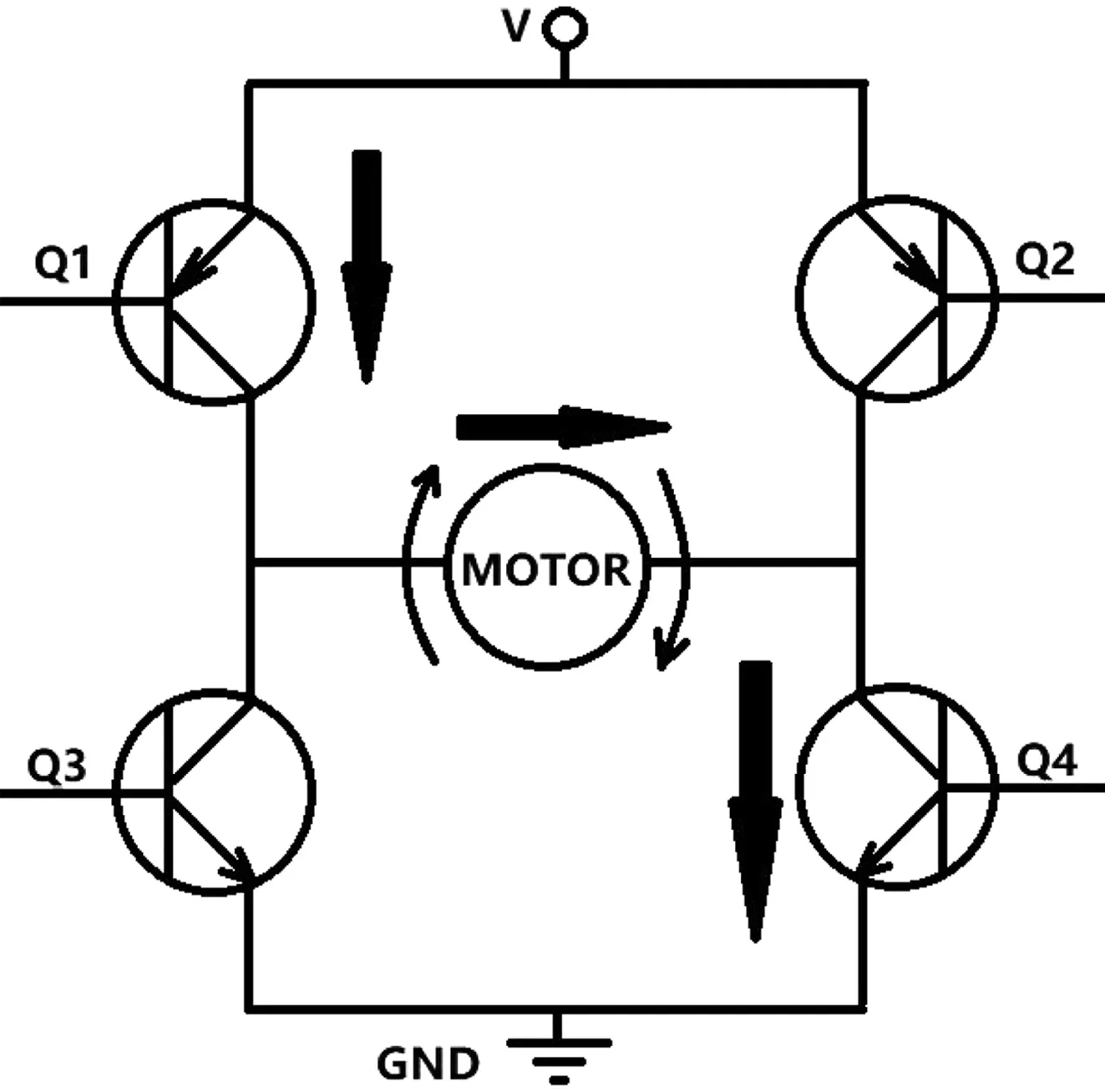
圖16 H橋電路2Fig.16 H bridge circuit 2
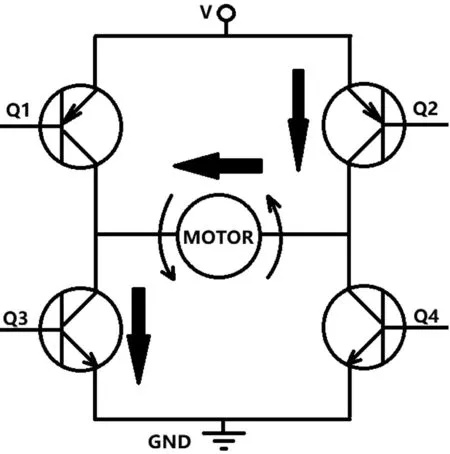
圖17 H橋電路3Fig.17 H bridge circuit 3
使用脈沖寬帶調制方法使MOS管或場效應管按照一定的頻率開關,實現實時調速的效果。
Q1、Q3與Q2、Q4由于其同時只有一路導通,因此可以采用相位相差180°的脈沖寬帶調制信號(PWM)進行控制,可以采用IR2104S等芯片實現。電路圖采用MOSFET進行搭建,如圖18所示。
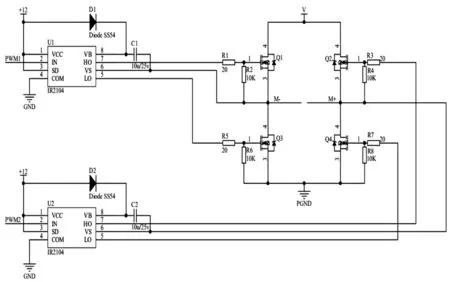
圖18 基于MOSFET的H橋驅動電路Fig.18 H bridge driving circuit based on MOSFET
設計驅動電路時,可以直接使用耐壓值高于電源電壓,最大允許通過電流高于電機啟動電流的MOS管或場效應管。但是電路較為復雜,為了使電機方向可控,轉速可調,需要占用單片機大量復用口,因此選用BTN7971等集成IC芯片,既可簡化電路,也符合設計要求,具體電路如圖19所示。

圖19 BTN7971驅動電路Fig.19 Driver circuit for BTN7971
3.3 驅動隔離電路的設計
由于電機啟動時的倒灌電流較大,電路的隔離保護尤其重要。電機驅動的隔離方法為增加光耦合電路進行信號隔離。選用HCPL系列光耦,由于上升時間與下降時間都為ns單位,所以可以適用于多種頻率的脈沖寬帶調制信號,最高頻率可達上千萬,電路如圖20所示。控制信號PWM輸入分別為A1、B1,當A1、B1為高電平時,發光二極管截止,其對應的三極管未受到光照也截止,由于上拉電阻的作用,A_T、B_T輸出高電平,當A1、B1為低電平時,發光二極管導通,對應的三極管也隨之導通,A_T、B_T被拉低。此電路實現了隔離。
使用光耦電路有許多好處,遇到執行部件非正常工作時,如電機堵轉,光耦可以將干擾隔離,保護前級控制電路。增加了系統的安全性。
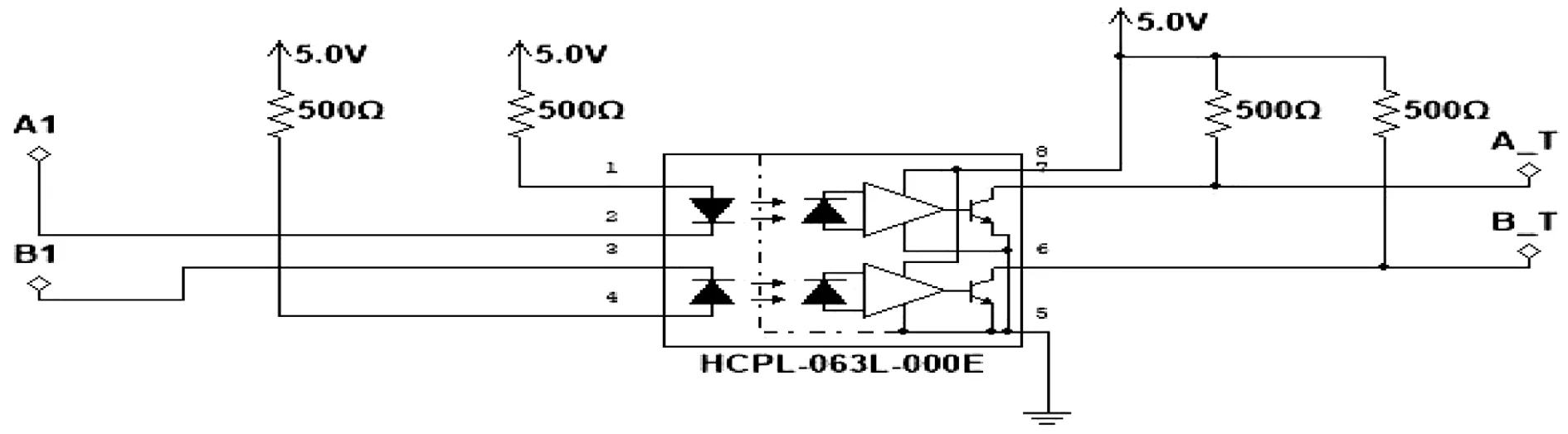
圖20 HCPL0630光耦隔離電路Fig.20 HCPL0630 optocoupler isolation circuit