輸煤棧橋巡檢機器人控制系統設計與實現研究
2021-07-08 07:56:06馬騁
科學與信息化 2021年18期
馬騁
神華福能發電有限責任公司 福建 泉州 362700
引言
帶式輸送機是煤炭生產階段的常用運輸裝置之一,其在煤炭資源采掘、生產、轉運及加工環節均有應用,和其他常規運輸設備及運輸形式相比較,其有持續運輸量大、運載能量高、能順利實現較長或超長距離持續運送、運轉效率高、適用工作環境的能力強、便于實現智能化控制等諸多優勢。帶式輸送機持續、安穩、正常作業,是煤炭企業安全、高效生產的重要保障之一[1]。但眾所周知,煤炭開采、運輸環境條件的復雜度、惡劣性均處于較高水平,外加運輸機的持續運作工作特征,在現實生產中發生故障的概率較高,不利于煤炭加工、運輸活動順利推進,甚至對礦工生命安全構成威脅。對帶式輸送機進行動態監控、保護是煤炭生產中需落實的一項工作內容。本課題設計開發出一種巡檢機器人,用其將傳統人工巡檢方式取代,實現了對帶式輸送機運轉狀態的有效、智能化監測。
1 機器人硬件系統設計
圖1 是輸煤棧橋巡檢機器人的構成圖[2]。在傳動系統的牽引下,巡檢儀能順著帶式輸送機巷道往返移動,動態化收集輸送機沿線運轉階段形成的各項監測數據,并利用由信號轉化器建設出的無線網絡傳輸至顯示控制箱內,在監控界面上能動態化的呈現出整個輸送機的運轉狀態。利用動力電池對巡檢儀提供電能,能夠參照巡檢具體路況與剩余電量,在礦井下實現智能快捷式充電。
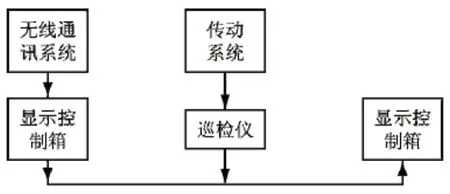
圖1 輸煤棧橋巡檢機器人的框圖
1.1 傳動系統
該系統在輸送軌道上能智能行走,在礦井下狹窄空間及容易發生巷道變形的工況下表現出較高的適用性[3]。
1.2 無線通信系統
信號轉換器的功能主要是建設無線通信網絡平臺,呈現控制箱和巡檢儀之間的信息數據傳送情況,也準許接入那些符合國家標準的它類無線設備、為確保通信系統運轉順暢性、安穩性,參照輸煤現場巷道的實際狀況,每間隔250m左右的距離布設一臺信號轉化器,對應的防護級別是IP65,能夠直接被用于有煤塵與淋水的工況條件下,無須布置額外的防護罩,當通信系統安全、穩定運轉階段,無線帶寬的最高值能夠達到300M,不僅確保了高清視頻傳送過程的順暢性,對它類無線設備的聯網訪問行為起到一定支撐作用。信號轉化器的性能主要有如下幾點:
1.2.1 射頻與無線性能:轉化器自身具備抗干擾的性能,射頻單元2.4GHz,速率峰值300Mbit/s,接收靈敏度最高能抵達-100dBm,輸出增益最大值27dBm(500mW)。
1.2.2 結構設計精細度較高,為安裝與調試過程創造了便利條件,光纜、電源、網絡接口等均應用了優質的防水速插接頭,為設備狀態調試、更換等操作創造了便利條件。
1.2.3 無線網絡化管理,Web操作界面具備十分強大的功能。
1.3 顯示控制箱
其被安裝在輸送機機頭的操控硐室中,動態呈現視頻圖像、預警、巡檢儀方位、驅動電流、電池電量等信息,外放輸煤現場吃阿基的到聲音,自動分析、判斷異常信號,調控巡檢儀與傳統系統的運轉狀態,涵蓋了攝像頭方位角與巡檢儀前進、后退及暫停等動作情況。工控機是顯示控制箱的主要構成,抗干擾能力強、運行穩定是其主要特征,僅為15英寸顯示屏上能清晰地呈現出巡檢儀利用無線網絡傳送的多路實時視頻,并順利地完成單路和多路視頻之間的切換操作[4]。
1.4 巡檢儀
其能在傳動系統的牽引下,順著輸送機移動路線實現全面監測,其上配置了紅外溫度傳感器,通過檢測輸送機發射出的紅外輻射強度測算出表層溫度,對設備火災事故能起到一定防控作用,內置了動力電池組以及低功耗設計,為移動設備供電過程創造了便利條件。
2 數據采集及控制原理
采集視音頻數據并呈現出相應的圖像:設計出的機器人本體具有采集輸煤現場聲音、圖像信息的功能,并將其完成的存儲在硬盤內特定路徑上;調控三路視頻圖像的呈現情況,也能同步顯示三路成像情況,也能分別顯現出各路視頻圖像狀況。
攝像機自體具備的前、后轉功能可以調控機器人自體的第三路攝像機的視頻采集角,能夠在前、后分別轉動60°,即能實現在120°范疇中轉動。比如,卸煤碼頭至鴻山電廠裝設了C-9B、C-10B一路帶式輸送機,預留一路C-9A、C-10A帶式輸送機,系統攝像機的自帶的旋轉功能可以全面的采集輸送機設備運轉信息,協助運維人員更精準的判斷其運轉狀態。
機器人功能控制牽引系統對機器人前進、后退過程能起到一定驅動作用,輔助帶式輸送機沿預設線路安全、穩定地做往復運動,全面采集輸煤現場形成的各項信息。
數據采集功能:設計出的機器人上安裝了溫度、煙霧傳感器,分別負責采集生產現場的二路溫度、一路煙霧信號,針對收集到的數據進行壓縮處理后,以無線終端設備為載體將采集到的數據完整的傳送到PLC控制箱內[5]。如果判斷出采集到的數據超出設計的限值,系統將會自動傳送出報警信號,調控輸送機的運轉過程實現緊急停車,而后機器人本體再進行探測,對輸送現場發是否存有火災隱患因素做出科學判斷。
皮帶管理:設計出的巡檢機器人能參照采集系統收集到的圖像信息,能實現自動化辨識比較,全面監測皮帶機的運轉狀況及環境條件,對皮帶機及其重要輔助設備的健康狀況進行科學測評,并動態化的生成報警信息,將其反饋給運維管理人員,系統能完整的呈現出皮帶掃描儀的配置參數及方位監測信息、皮帶異常運轉狀態相應的預警信息,便于相關人員快速的查閱皮帶異常數據對應的圖像。
落煤管運轉狀態的控制:在落煤管監控頁面上能動態的呈現出落煤管的動態監測數據,在畫面上對掃描儀監測過程能進行啟、停操作;頁面上還能呈現出落煤管的基本參數設計情況,結合煤炭輸送現場狀況對參數數據進行微調整,并且還具備還原到原始參數設置情況的功能。當探查到輸煤現場流量異常時,能及時傳送出預警數據,幫助運維人員觀察到落煤管異常數據對應的圖像。
智能辨識與分析:針對輸煤現場不按照規定要求佩戴安全帽的礦工人員,記錄其違規行為,發出報警信號并記錄相關信息。
3 軟件設計
控制軟件是機器人系統調控功能實現的重要基礎,本課題研究中采用模塊化程序去設計控制軟件,其囊括了音視頻、本體牽引系統、輸送機運轉控制、中斷程序模塊。
3.1 音視頻控制程序模塊
功能以錄像、靜音、圖像切換、PC關機/重啟、攝像機前后旋轉等為主。錄像功能,即將機器人本體收集到的輸煤現場圖像、聲音統一保存在硬盤特定路徑;靜音功能主要是調控機器人自體采集的現場聲音的播放量大小;圖像切調功能主要是調控三路視頻圖像的呈現情況,能夠實現三路圖像呈現的同步性,也可以對三路攝像機收集到的視頻圖像進行放大處理后單獨呈現出來[6]。PC關機/重啟功能,即控制顯示界面系統的關機、重啟動作的現實狀況。為系統通電以后其便會自動步入至顯示界面,按下“PC關機/重啟控制”鍵位,閉合界面,系統自動退離;再次按下以上鍵位,PC斷電,經2s后恢復到最初的通電狀態,重啟操作后便能進入到顯示界面上。攝像機前、后旋轉過程主要是調控機器人攝像機三路采集視頻信息的方位角。前、后轉控制信號見形成了閉鎖式關系,當攝像機對外發出前轉信號后,后轉信號將會被儲留在原位不動,以上狀態持續到攝像機前轉信號抵消為止,若在4s中攝像機未形成前轉狀態相關些反饋信號,那么將會自動消除攝像機前轉控制信號。以此類推,能夠了解到攝像機后轉信號的運轉狀況。攝像機視頻方位角在前、后方向分別旋轉60°。
3.2 本體牽引控制模塊
主要用于調節、控制牽引系統驅動機器人自體的前進、后退過程,確保其能順著輸送機方向往返運轉、全面的采集生產現場形成的數據[7]。前進、后退兩個控制信號間形成了閉鎖式關系,若系統前行階段按下了“后退”鍵,則會引起系統逆向發生閉鎖,緊急剎車,只有在復位閉鎖信號以后,二次啟動以后,系統方能恢復到正常運轉狀態中。
3.3 運行控制模塊
主要是控制輸送機的運轉過程,若在輸煤現場采集到的溫度或煙霧數據超出警界線值時,即可調控輸送機實現停車,也可以通過指派人工進行控制進行急速暫停。為確保系統運行過程的安全性、穩定性,為本系統內置了多路傳感器、軸編碼器、限位開關等,并且設計了相配套的信號輸入解析報警流程,比如張緊異常、錯向維護、電機過流、電機運轉過程堵塞等,不管是出現以上哪種類型的保護報警信號,造成的后果均是一樣的,即系統急停;只有在解除故障問題之后,按下“事故復位”鍵,清理掉所有故障信號后,才可以再次啟動系統運轉。
3.4 中斷程序模塊
其通過收集軸編碼器運轉方向信息,動態獲得機器人自體的現實運轉方向。在抵達定時時間以后,則便會即刻觸發中斷,實施關聯中斷程序INT -0,這樣便能順利獲得機器人的現實運行方向,基于機器人自體的運轉方向設定系統實際方向。輸送機機頭運轉時正向前進,既機尾運轉是逆向后行[8]。按下“前進”或“后退”鍵后便能啟動系統,牽引機器人本體便會隨之運轉。若機器人本體的現實運轉方向和調控指令方向相逆,那么系統將會自動傳送出誤向維護報警信號,系統急停;按下“事故復位”鍵后,便會智能清理掉故障報警信號,而后就可以重新啟動系統。
4 結束語
本文設計并介紹了一款輸煤棧橋巡檢機器人系統,較為詳細地闡述了其控制系統、運行控制原理及實現本體功能的方法。在該機器人裝置的協助下,能夠動態采集輸送機運轉階段形成的各種數據信息,及時探查到輸送機運轉階段形成的各種問題,針對異常情況及時發出報警信息,借此方式使輸送機實現安全、穩定生產有更大保障。目前,本系統已經通過權威機構的試驗驗證,各項性能指標檢測值完全符合輸煤現場安全生產的要求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
