Spark 并行化改進的SDKB-DBSCAN 聚類算法
2021-07-09 17:19:22史愛武尹杰范平
現(xiàn)代計算機 2021年14期
史愛武,尹杰,范平
(1.武漢紡織大學數(shù)學與計算機學院,武漢 430000;2.湖北科技學院計算機科學與技術學院,咸寧 437000)
0 引言
數(shù)據(jù)采集存儲技術快速發(fā)展積累了大量數(shù)據(jù),對數(shù)據(jù)深入分析并指導實踐成為迫切需要,基于此大數(shù)據(jù)研究成為近年來研究熱點。聚類分析是數(shù)據(jù)挖掘中的分支,來源于多研究領域,包括統(tǒng)計學、機器學習、模式識別等。其可以輔助分類研究,應用在生物學、地理信息學、商業(yè)分析、互聯(lián)網(wǎng)搜索等領域。DBSCAN 算法是基于密度的聚類算法,它具備抗噪聲能力,能夠在具有噪聲的數(shù)據(jù)集中發(fā)現(xiàn)任意形狀類簇,有較好的聚類效果[1]。但DBSCAN 算法依然存在缺陷:算法在聚類中迭代計算,需要大規(guī)模內(nèi)存磁盤I/O 交互,降低了計算速率;算法需要人工干預確定閾值,且對初始參數(shù)大小有敏感性,參數(shù)選定不準確,易降低聚類準確率;對不同數(shù)據(jù)集分布,特別是密度分布不均勻的樣本集,采用全局閾值,對樣本核心點,邊界點和噪聲點的劃分會存在偏差,降低聚類準確率;對分布分散程度不高的數(shù)據(jù)集,全局閾值會造成不同簇類合并成同一簇類,降低聚類準確率。針對以上問題,許多學者對DBSCAN 算法進行研究及改進。
周水庚等人[2]提出矩形分區(qū)局部聚類策略;邱寧佳等人[3]提出基于MapReduce 的GA-DBSCAN 算法,胡贏雙等人[4]提出基于MapReduce 網(wǎng)格劃分強連通聚類算法;黃明吉等人[5]提出樣本數(shù)據(jù)量劃分策略和Spark并行化,計算速率有所提升,但存在網(wǎng)格劃分,數(shù)據(jù)量劃分等方法不能相對較高契合多密度不均勻聚類,準確率有所下降。韓利釗等[6]提出網(wǎng)格合并方法,可靈活定位不均勻數(shù)據(jù)劃分區(qū)域,但其需要確定Eps參數(shù)初值,且算法時間復雜度相對較高,效率相對較低;于亞飛等人[7]、宋金玉等人[8]提出DBSCAN 算法參數(shù)配置策略,利用距離k-dist矩陣以及概率密度分布曲線獲取參數(shù)值,提高參數(shù)自適應性,但是該方法需要人工干預確定k值,不同k值對應擬合曲線導數(shù)計算的大小不同;宋明等人[9]提出數(shù)據(jù)交替分區(qū)增量計算,田路強[10]提出分布式增量聚類,在提高聚類準確率同時會出現(xiàn)數(shù)據(jù)增量合并效率偏低。
針對上述學者研究需要提升的方面,提出SDKBDBSCAN 聚類改進算法,設計不規(guī)則動態(tài)區(qū)域并行計算模型,采取過濾不規(guī)則邊界單元區(qū)域,指定不重疊區(qū)域的合并策略,應用概率密度以及均值方法,搭建Spark 并行計算框架算法架構。
1 基本理論內(nèi)容
1.1 DBSCAN算法
DBSCAN 算法基于密度對空間樣本形成類簇。在n維空間內(nèi),以參數(shù)設定閾值半徑Eps以及閾值大小為聚類限定條件,將空間內(nèi)樣本點以迭代計算方式發(fā)現(xiàn)任意形狀類簇,過濾樣本數(shù)據(jù)集噪聲點,得到密度聚類結果。在n維樣本集中,列出算法相應定義:
定義1Eps鄰域在n維空間內(nèi)對任意的樣本點p,以p為中心,Eps為半徑內(nèi)所有樣本點集合。即表示為式(1):

其中Dist(p,q)表示p到q的距離,通常情況下,用Minkowski距離公式計算Dist,公式表示為式(2):

定義2核心點在n維空間內(nèi)對任意樣本點p,滿足在以p為中心點的鄰域值不少于Minpts個樣本點。即表示為:,稱p為核心點;
定義3邊界點在n維空間內(nèi)存在一個p不屬于核心點,而且該點落在核心點的鄰域范圍內(nèi),稱p點為邊界點;
定義4噪聲點在n維空間存在一個點p不屬于核心點,而且該點落在所有核心點的鄰域范圍之外,稱p點為噪聲點;
定義5直接密度可達在n維空間內(nèi),若存在p在q的Eps鄰域范圍內(nèi),并且q為核心點,可稱p是從q出發(fā)直接密度可達,不具有對稱性。
定義6密度可達 在n維空間內(nèi),若存在數(shù)據(jù)集,滿足從pi出發(fā)到pi+1直接密度可達,那么可以說是p1出發(fā)到pi+1是密度可達。不具有對稱性但具有傳遞性。
定義7密度相連在n維空間內(nèi),若存在o,從點o出發(fā)到p密度可達,且從o出發(fā)到q密度可達,可稱p和q密度相連。具有對稱性,且p和q可以不屬于核心點。
1.2 Spark并行內(nèi)存計算框架
Apache Spark 是加州大學伯克利分校的AMP Lab實驗室研究并開發(fā),發(fā)展為Apache 頂級項目。Spark 是內(nèi)存分布式計算引擎框架,在沿用MapReduce 計算引擎結構基礎上,引入RDD(Resilient Distributed Dataset)分布式彈性數(shù)據(jù)集。執(zhí)行時數(shù)據(jù)映射到RDD 結構中,發(fā)揮其內(nèi)存計算結構特性以及在迭代計算中將數(shù)據(jù)反復緩存至內(nèi)存的特點,與MapReduce 將數(shù)據(jù)在內(nèi)存與硬盤I/O 轉(zhuǎn)換相較,提高十倍甚至百倍的計算速度[11]。
從RDD 依賴關系中,可對RDD 的操作分為邏輯傳遞的轉(zhuǎn)換操作和實際運行的行動操作,轉(zhuǎn)換操作不會立即執(zhí)行,要等行動操作全觸發(fā)。用于并行操作重要的算子,包括Map、Reduce、Join、Foreach 等,對算法優(yōu)化起到關鍵作用。
Spark 整體架構如圖1 所示。
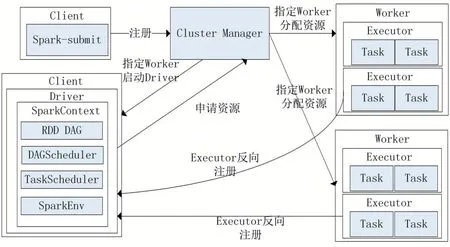
圖1 Spark架構圖
2 SDKB-DBSCAN改進算法
2.1 不規(guī)則動態(tài)密度區(qū)域劃分
網(wǎng)格劃分即設存在一個d維數(shù)據(jù)集S={s1,s2,…,sd},S中各維數(shù)據(jù)表示為在第i維數(shù)據(jù)區(qū)間[ri,li)上i=1,2,..,d且各數(shù)據(jù)是有界的,則稱D=[r1,l1)×[r2,l2)×…×[rd,ld)為d維的數(shù)據(jù)空間。D維空間是不相交數(shù)據(jù)集,表示為數(shù)據(jù)各個屬性,對每一維數(shù)據(jù)空間劃分,可形成d維網(wǎng)格單元,網(wǎng)格單元是以左閉右開的形式表示,其是d維空間基本劃分單元[9]。對于網(wǎng)格劃分,給出d維空間下每一維數(shù)據(jù)空間網(wǎng)格寬度的計算公式,表示為式(3):

其中c為擴充線性方程,適當放縮網(wǎng)格寬度,找到合適的初始單元網(wǎng)格。計算各個維度的邊界差與樣本個數(shù)的比并取其最小值作為網(wǎng)格寬度的基準。之后可確定各個數(shù)據(jù)維度網(wǎng)格數(shù)量并確定其網(wǎng)格索引[12]。表示為式(4):

區(qū)域合并即初始網(wǎng)格單元后,在d維空間內(nèi)數(shù)據(jù)p是包含在某一個網(wǎng)格單元中,每一個網(wǎng)格單元由不同數(shù)據(jù)填充,可用每一個不相交的網(wǎng)格數(shù)據(jù)個數(shù)作為網(wǎng)格單元密度,den(f)表示密度大小。不規(guī)則分區(qū)算法偽代碼如下所示:
算法1 貪心策略廣度優(yōu)先搜索層次歸并算法
輸入:DataSet 數(shù)據(jù)集
輸出:partitionInfo 分區(qū)數(shù)據(jù)集

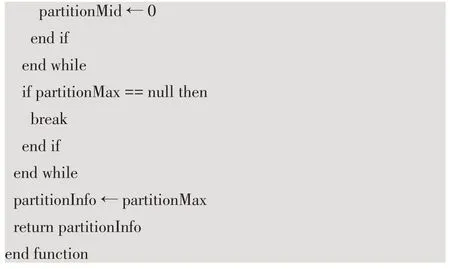
區(qū)域劃分是控制相鄰單元網(wǎng)格密度相對差比來合并網(wǎng)格單元,引入貪心策略,將問題分解成若干子問題,尋找未標記索引對應的密度最大值為核心網(wǎng)格單元,與相鄰網(wǎng)格單元計算密度相對差比[13]表示為式(5):

將其作為判斷網(wǎng)格合并條件,初始核心與相鄰網(wǎng)格依次按上式計算,并將滿足d d()f,f0<ε條件,來確定相鄰網(wǎng)格歸屬。若滿足條件時,將相鄰網(wǎng)格與核心網(wǎng)格標為一類,為減弱平均密度帶來的密度差比波動,采取一種層次歸并算法,統(tǒng)一平均密度值,其表示為式(6):
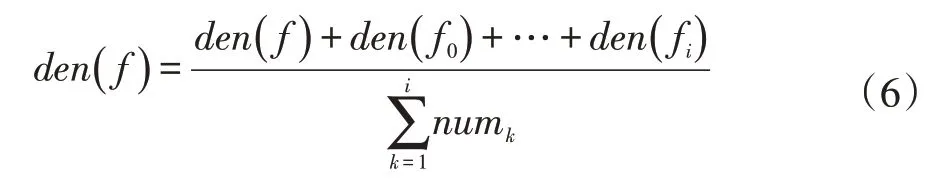
區(qū)域劃分采用廣度優(yōu)先搜索算法,不斷合并滿足條件的網(wǎng)格;不滿足條件時,相鄰單元網(wǎng)格標記為邊界網(wǎng)格。將所有計算過的網(wǎng)格標記為已搜索狀態(tài),直到本次合并結束。若此時還有符合條件是未搜索狀態(tài),則繼續(xù)求解子問題,直至區(qū)域劃分結束。
2.2 區(qū)域自適應參數(shù)局部聚類
數(shù)據(jù)區(qū)域劃分后,將不同區(qū)域數(shù)據(jù)分配到Spark 的RDD不同分區(qū)中。改進算法優(yōu)化不同分區(qū)自適應確定Eps和Minpts,一定程度減小密度不均勻數(shù)據(jù)所統(tǒng)一參數(shù)對聚類的影響。
改進算法在自適應確定參數(shù)上引入核密度估計理論。定義為:設X1,X2,…,Xn是從總體X中抽取的獨立同分布樣本,總體X有未知分布密度函數(shù)f(x),x∈R,則f(x)的核密度估計為式(7):

式中函數(shù)K(u)為核函數(shù),h是與n有關的正數(shù),為光滑參數(shù)或者窗寬[14]。
設定不同h窗寬,可得到不同效果f(x)。h窗寬過小時,f(x)限制局部觀測數(shù)據(jù),會得到過多錯誤峰值,估計函數(shù)效果不理想,將h映射對應自適應Eps取值過小,會增加樣本成為噪聲概率,降低聚類準確率;h窗寬過大時,f(x)過于光滑,無法去反映出正確的密度函數(shù),同樣h窗寬對應Eps取值過大,對于不同密度數(shù)據(jù)會錯誤合并為同一類,降低聚類準確率。
h窗寬的確定可影響Eps確定,改進算法采用Gaussian做為核函數(shù),最小化積分均方誤差MISE計算求得最優(yōu)h窗寬,獲取最優(yōu)Eps[15]。MISE表示為式(8):
其中可將AMISE(h)表示為漸進積分均方差誤差,表示為式(9):

求解最優(yōu)h窗寬,即需要AMISE(h)誤差值取得最小,因此對上式求偏導數(shù)可得式(10):

數(shù)據(jù)樣本總體服從方差為σ2的正態(tài)分布,用高斯核函數(shù),代入式(10)可得式(11):

由此可得自適應下最優(yōu)Eps。
自適應確定Minpts采用在分區(qū)中每個Eps鄰域范圍內(nèi)樣本個數(shù)的均值策略,表示為式(12):

其中Num即表示在每個Eps鄰域范圍內(nèi)所包含樣本數(shù)量,將上式定義到并行結構中內(nèi)存計算。
2.3 自定義聚類合并策略
區(qū)域劃分以及分區(qū)自適應確定參數(shù)并行計算后,給出自定義策略將局部聚類結果合并,形成最終全局聚類[16]。改進合并策略采用對各分區(qū)下不規(guī)則邊界網(wǎng)格單元中樣本進行局部合并。具體分為以下幾點:
(1)設在兩個分區(qū)C1,C2的邊界網(wǎng)格上分別對應樣本P1,P2,若P1,P2分別在對應分區(qū)上為其自適應確定下Eps的核心點,并且存在dist(P1,P2)≤min(epsC1,epsC2),可以判定C1,C2合并為同一分類;
(2)在一類簇不規(guī)則邊界網(wǎng)格單元中的噪聲點,有可能是另一個類簇中的邊界點。設在一個分區(qū)C1中存在一個噪聲點P1,若在其他類簇中如C2的邊界網(wǎng)格單元中樣本能符合一個P2使得dist(P2,P1) ≤epsC2,則將分區(qū)C1中的P1劃分為C2類;
(3)在兩個不規(guī)則邊界網(wǎng)格單元中的噪聲點,會有邊界樣本個數(shù)一側相對較少或者密度相對較低的情況。在聚類合并的全局條件下,若存在兩個分區(qū)C1,C2中分別有噪聲點數(shù)據(jù)集S1,S2,其中一個樣本P,滿足dist(P,Pi)≤min(epsC1,epsC2)的鄰域范圍內(nèi)密度直達的樣本Pi有Numi≤min(epsC1,epsC2),則可將噪聲點P定義為一個新類簇中的核心點,剩余的樣本Pi為新類簇中的邊界點。
2.4 改進算法流程結構
上述為SDKB-DBSCAN 具體改進算法方案,這里給出算法整體流程與Spark 并行化設計結構。SDKB_DBSCAN 算法執(zhí)行邏輯流程如圖(2)所示。
SDKB_DBSCAN 算法Spark RDD 并行化轉(zhuǎn)換執(zhí)行算子流程如圖(3)所示。

圖3 SDKB_DBSCAN RDD轉(zhuǎn)換執(zhí)行算子流程圖
InitData 在經(jīng)過mapValue 算子切割后,將InitRDD轉(zhuǎn)化成DataFrame 數(shù)據(jù)格式。數(shù)據(jù)在分區(qū)階段設計結構dfZone
分區(qū)內(nèi)并行計算LocalDBSCAN,動態(tài)自適應確定Eps以及Minpts。分區(qū)聚類結果標記數(shù)據(jù)結構partition
改進算法分區(qū)合并策略,設計數(shù)據(jù)結構為merge
3 實驗分析
3.1 實驗環(huán)境
為驗證改進算法準確率和運行速率性能,編碼實現(xiàn)改進算法,設計實驗加以分析。實驗環(huán)境如表1所示。

表1 實驗硬件以及軟件環(huán)境
實驗采用對串行DBSCAN 算法,并行化網(wǎng)格分區(qū)SparkDBSCAN 算法,以及SDKB_DBSCAN 改進算法對比實驗,使用的數(shù)據(jù)集如表2 所示。

表2 實驗數(shù)據(jù)集
實驗數(shù)據(jù)聚類結果對比分析:全局人工干預閾值Local_DBSCAN 算法,類簇劃分需多次調(diào)參以獲取更適類簇,圖4(a)所示,密度不均勻聚類存在噪聲點較多,誤差較大;Spark_DBSCAN 并行算法,網(wǎng)格分區(qū)并行迭代,全局人工干預閾值,重疊邊界區(qū)域局部合并來實現(xiàn)并實驗,聚類依賴于網(wǎng)格劃分,不能做到動態(tài)參數(shù)自適應,且網(wǎng)格分區(qū)會使算法無法在全局范圍識別任意類型簇,圖4(b)所示,SparkDBSCAN 算法聚類準確率,略低于Local_DBSCAN 算法;SDKB_DBSCAN 改進算法,不規(guī)則動態(tài)分區(qū)降低密度不均勻敏感性,動態(tài)自適應閾值減少人工干預誤差并內(nèi)存計算,設計緩存機制模型,圖4(c)所示,改進算法在聚類數(shù)據(jù)尤其是密度不均勻類簇準確率較前兩種算法有相對提升。

圖4 三種算法數(shù)據(jù)聚類效果圖
Local_DBSCAN、SparkDBSCAN、SDKB_DBSCAN算法準確率量化數(shù)據(jù)如表3 所示。

表3 三種算法聚類準確度(%)
3.2 并行實驗性能
從運行數(shù)據(jù)量和時間來看,Local_DBSCAN 算法在相同數(shù)據(jù)維度下有明顯時間消耗,效率限制明顯,串行計算消耗更多CPU 與內(nèi)存,SDKB_DBSCAN 改進算法,設計并行計算有向無環(huán)圖DAG 以及Spark 并行過濾緩存機制與類簇合并融合算法,從局部聚類到聚類合并提升計算效率,在數(shù)據(jù)分區(qū)階段廣度優(yōu)先搜索不規(guī)則分區(qū),需消耗一定計算資源,整體來講Spark_DBSCAN與SDKB_DBSCAN 改進算法聚類效率在數(shù)量級上相同。圖5 所示,SDKB_DBSCAN 改進算法運行效率略高于Spark_DBSCAN 算法,高于Local_DBSCAN 算法。

圖5 三種算法時間消耗對比圖
加速比是同一任務運行單核處理和并行處理運行時間消耗的比率,可以用來衡量并行性能。圖6 顯示不同核數(shù)不同數(shù)據(jù)量加速比。

圖6 SDKB_DBSCAN多核加速比
在核數(shù)低且數(shù)據(jù)量少的情況下,對并行處理效率并無明顯提升,其中調(diào)度資源分配,并行化Suffle 階段會消耗一定時間,若數(shù)量增加核數(shù)增大,則加速比提升明顯。
4 結語
針對DBSCAN 算法存在的缺陷,串行計算速度慢,人工干預確定閾值參數(shù)敏感,數(shù)據(jù)密度不均勻降低準確率等問題,提出一種不規(guī)則動態(tài)區(qū)域劃分,自適應并行確定各閾值,不規(guī)則邊界區(qū)域緩存機制合并的SD?KB_DBSCAN 聚類改進算法。實驗表明,改進算法對準確率和運行速率相對優(yōu)于Local_DBSCAN 以及Spark_DBSCAN 算法。
后續(xù)工作,將圍繞對更多的數(shù)據(jù)集進行測試和算法優(yōu)化。包括分區(qū)策略算法選取優(yōu)化以及Spark 并行融合設計優(yōu)化,改進算法運行模式,Spark 緩存策略和內(nèi)存管理優(yōu)化,進一步提高SDKB_DBSCAN 聚類改進算法性能。