多級帶式輸送機集中控制系統研究
2021-07-09 17:29:31邊耀偉
山西能源學院學報 2021年2期
邊耀偉
【摘 要】 為了提高煤礦井下帶式輸送機運行效率低下、控制分散、啟動效率不高及能耗大等問題,文章提出一種多級帶式輸送機集中控制系統并進行現場應用。結果表明:1)控制系統通過將主控制與分級控制相結合,可實現帶式輸送機集中以及分級控制;2)通過監測輸送機帶煤流位置、運輸速度,并按照預先設定的控制方式可實現帶式輸送機順煤流啟動,從而顯著提升輸送機啟動效率;3)通過模糊PID控制系統實現帶式輸送機階梯調速,不僅可滿足煤炭運行需要,而且可降低帶式輸送機能耗、避免頻繁調速問題。研究成果可為其他礦井帶式輸送機集中控制系統設計及應用提供一定借鑒。
【關鍵詞】 煤炭運輸;帶式輸送機;集中控制;煤量檢測;階梯調速
【中圖分類號】 TP273 【文獻標識碼】 A 【文章編號】 2096-4102(2021)02-0017-03
現階段礦井帶式輸送機管理相對較為粗放,按照傳統逆煤流方向依次啟動帶式輸送機,啟動時需要皮帶司機值守,不符合煤礦智能化改造的趨勢;井下帶式輸送機現階段基本完成變頻控制改造,但是帶式輸送機運行多為恒速方式,變頻器僅發揮軟啟動功能,未能真正起到節能降耗作用。傳統的帶式輸送機運行控制存在啟動效率低、能耗高等問題,為此,文中提出一種井下多級帶式輸送機集中控制系統,以期能提高礦井多級串聯帶式輸送機運行效率。
1集中控制系統架構
多級帶式輸送機集中控制系統采用主控制、分級控制相結合方式,具體架構見圖1。集中控制系統主要組成部分有邏輯控制、變頻控制(速度控制)以及傳感器監測等。
邏輯控制部分采用串口總線連接,結構細分為主控制臺、PLC控制系統以及分級控制臺。主控制臺用以監測并管控各級帶式輸送機運行情況;PLC控制系統是調整帶式輸送機運行的核心,通過PLC控制系統對各臺帶式輸送機運行數據進行采集分析,并將結果傳輸給對應的分級控制臺;分級控制臺主要用以調整單臺帶式輸送機運行速度。
變頻控制部分是依據PLC控制器指令,利用變頻器調整驅動電機運行速度,進而實現帶式輸送機按照預先設定速度運行。
2輸送機煤流量監測
現階段輸送帶煤流量監測方法包括有電子皮帶秤、激光掃描儀等,其中電子皮帶秤需要在輸送帶上布置多組稱重傳感器,安裝繁瑣且監測精度較低;激光掃描儀雖然安裝方便,但是也存在受外界影響顯著、測量結果不穩定等問題。為此實現輸送帶煤流量的高精度監測,文中提出采用基于超聲波的煤量檢測裝置對煤流量進行監測。
超聲波傳感器煤量監測流程為:
通過超聲波波傳感器獲取到輸送帶上堆煤橫截面面積;
通過霍爾傳感器測定驅動滾筒轉動速度,從而確定輸送帶運行速度;
將超聲波傳感器波獲取到的堆煤橫截面積、霍爾傳感器獲取到的輸送帶運輸速度信號傳輸給信息處理面板即可獲取到單位時間內輸送帶運輸煤量。
現場測試發現,L距離超過5m時獲取到的煤量檢測結果較為精準。為此,將輸送帶按照5m長度劃分成若干段,將每段煤流量信息存儲到分級控制臺中,從而可較為精準地掌握帶式輸送機上煤量的整體分布情況。
3輸送機控制策略
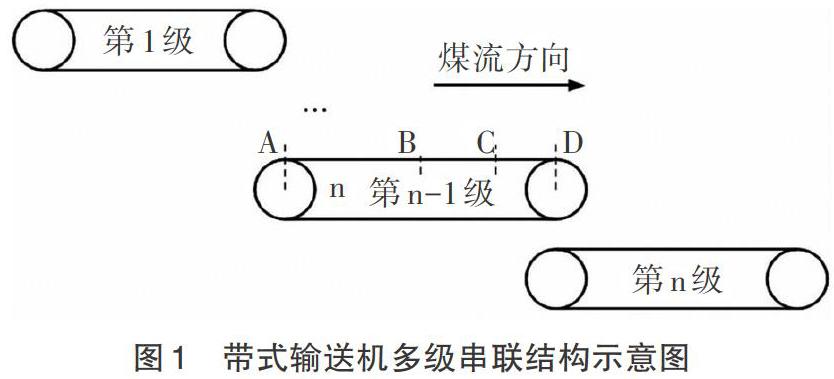
具體井下布置的帶式輸送機多級串聯結構見圖1所示。
3.1輸送機啟動控制
文中提出采用輸送機順煤流啟動控制策略。具體啟動控制流程為:
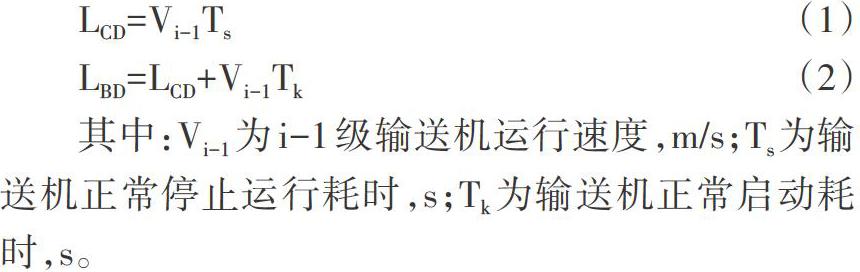
如圖1所示,將i-1級輸送機上C-D點距離LCD確定為帶式輸送機安全停止距離;B-D點距離LBD定義為安全啟動距離,則LCD、LBD可通過下述公式計算:
其中:Vi-1為i-1級輸送機運行速度,m/s;Ts為輸送機正常停止運行耗時,s;Tk為輸送機正常啟動耗時,s。
第i級輸送機啟動運行條件為:輸送機在LBD距離內無物料,則先啟動i-1級帶式輸送機,當物料達到B點位置后啟動i級帶式輸送機。
當i-1級帶式輸送機物料運行至C點位置時,i級帶式輸送機仍未正常啟動,則對各級帶式輸送機緊急制動,停止運行,確保物料不會在輸送機上堆積。
3.2輸送機運行控制
模糊PID控制系統采用控制算法調整帶式輸送機變頻器輸出頻率,通過控制電動機轉速來調整輸送機運行速度。模糊控制系統依據輸送帶運輸煤量智能調整運行速度,從而實現煤流量與運行速度匹配,使得帶式輸送機在理想狀態下運行。
系統核心部件為模糊PID控制器,為了避免帶式輸送機頻繁調整給煤炭運輸帶來影響同時增加電動機故障率,模糊PID控制器采用階梯調速方式,即為將運輸煤量劃分成若干區間,每個區間對應一運行速度,輸送機在對應煤量區間內保持某一速度運行。
4現場應用分析
山西某礦為設計生產能力300萬t/a的大型現代化礦井,現階段煤炭回采集中在6采區,煤炭運輸路線為:6501運輸順槽→6采區運輸巷→采區運輸石門→集中運輸巷→煤倉。井下布置有4臺帶式輸送機串聯運行,運輸總長度為3350m。運輸系統布置的帶式輸送機型號均為DTL-1200,配套的電機功率均為3×400kW。
4.1啟動過程分析
將文中所提帶式輸送機集中控制系統應用到該礦6501綜采工作面煤炭運輸中,現場應用后,帶式輸送機可實現一鍵順煤流啟動,較以往采取的多級逆煤流啟動方式相比,順煤流啟動可顯著提升帶式輸送機啟動效率并降低設備空轉時間,運輸系統啟動耗時縮短20min。
4.2運行過程分析
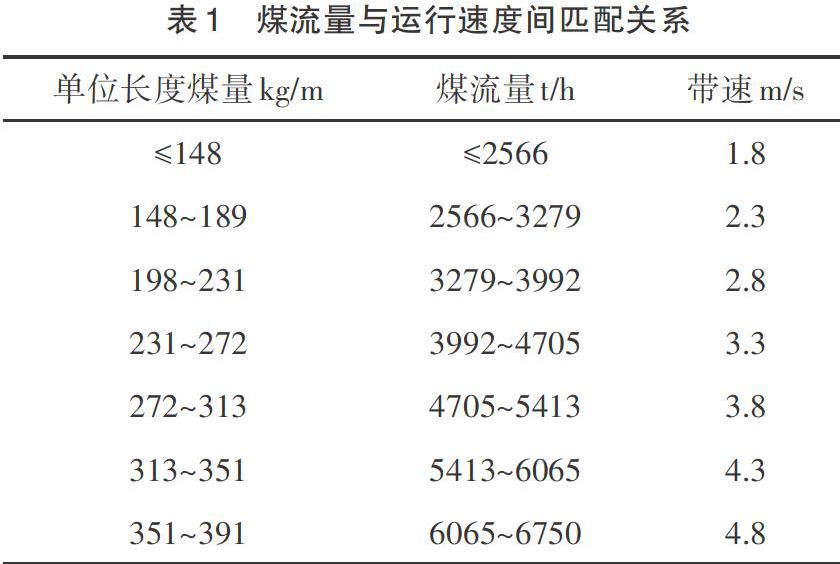
根據DTL-1200帶式輸送機工作情況,輸送機運行按照表1所示關系控制。
具體現場監測到6501運輸順槽內帶式輸送機流量及運行速度匹配情況見圖2。
從圖中看出:6501運輸順槽內帶式輸送機運行速度可根據煤流量進行調整,同時由于采用階梯調速方式,當煤流量變化較小時帶式輸送機運行速度保持不變;在現場監測期間(2h),帶式輸送機煤炭最大運輸量為額定運輸量的80%,輸送機按照3.5m/s運行速度時間為90min,按照3.0m/s(低速)以及4.0m/s(高速)運行時間均為15min,表明采取的運行控制方式不僅可滿足輸送機煤炭運輸需要而且可降低輸送機能耗,避免頻繁調速。
未采用集中控制系統前6501采面煤炭運輸系統能耗約為2.3×107kW·h/a,采取集中控制系統后能耗降低至約1.6×107kW·h/a,降低量達到7×106kW·h/a,年可節省電費約350萬元。
5結束語
文章提出了一種帶式輸送機集中控制系統,該系統將主控制以及分級控制相結合,實現帶式輸送機順煤流方向啟動;通過監測運載煤流量調整輸送機運行速度,實現運輸量與運行速度間匹配,從而實現多級帶式輸送機高效運行目的。
在6501工作面現場應用后,控制系統運行平穩,不僅提高了帶式輸送機運行效率而且降低了能耗,預計年可降低電費投入約350萬元,取得較為顯著的應用成果。
【參考文獻】
[1]宋晉華.煤礦帶式輸送機綜合監控系統的設計與應用[J].機械工程與自動化,2020(6):213-214,217.
[2]李志國.煤礦主運輸系統集中控制改造研究[J].機械管理開發,2020,35(11):149-150,153.
[3]孫圣華.帶式輸送機集中控制系統研究[J].能源與節能,2020(7):93-94.
[4]吳水章.PLC在長距離帶式輸送機中的應用[J].煤礦機械,2020,41(6):188-190.
[5]高士崗,高登彥,歐陽一博,等.煤礦智能一體化輔助生產系統及關鍵技術[J].煤炭科學技術,2020,48(7):150-160.
[6]都波.帶式輸送機綜合自動監控系統的設計[J].煤礦機電,2019,40(6):99-101,106.
[7]高立斌.基于順煤流節能的優化控制研究[J].中國礦山工程,2019,48(4):65-67.
[8]張漢昌.多級帶式輸送機遠程集中控制系統設計[J].煤礦機電,2019,40(4):28-31.