基于Kinco觸摸屏與DanFoss控制器之間的自定義CAN通訊*
2021-07-12 00:47:46陳永輝郝長峰
現代機械 2021年3期
關鍵詞:設置
陳永輝,郝長峰,張 峰,劉 栓
(1.河南省高遠公路養護技術有限公司,河南 新鄉 453000;2.公路養護技術裝備國家工程實驗室,河南 新鄉 453000;3.河南省高等級公路檢測與養護技術重點實驗室,河南 新鄉 453000)
0 引言
隨著信息技術的不斷發展,工業觸摸屏的價格在不斷降低。觸摸屏與CAN總線的集成使得觸摸屏在工程機械中的應用更加普及。尤其是通用組態型工業觸摸屏不僅具有成本優勢,而且在圖形界面的設計上更加方便。比如采用IFM控制器與IFM觸摸屏配合使用,雖然有成熟的基于Can Open的EDS可以應用,但是圖形界面卻要技術人員自己編程實現[2]。同樣如DanFoss控制器雖然可以與DanFoss觸摸屏直接進行硬件組態而不必考慮具體通訊問題,但是同樣圖形界面也是需要技術人員通過編程而不是通過組態的方式來實現。而采用通用組態型觸摸屏則很好地解決了其中比較繁瑣的圖形界面設計問題,但是與控制器之間的通訊問題則往往需要技術人員通過自行編程來實現。由于通用觸摸屏廠商通常并不對用戶開放通訊代碼,因此使其應用受到相應的限制。本文采用重新生成底層驅動的方式實現自定義CAN通訊協議并成功實現了通用觸摸屏與控制器之間的CAN通訊。
1 主要功能及實現
本文采用Kinco MT4414T觸摸屏和DanFoss MC050控制器進行通訊。Kinco MT4414TE觸摸屏具有7英寸有效顯示面積,帶有兩個串行口,一個CAN總線接口和一個以太網接口,采用HMIWare軟件進行組態和編程。DanFoss MC050控制器具有兩個CAN總線接口,采用PLUS+1 GUIDE軟件進行編程。首先對觸摸屏進行組態并設置CAN總線。如圖1所示在通訊連接選項中選擇現場總線。
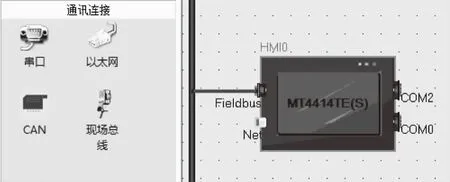
圖1 觸摸屏設置CAN總線示意圖
在現場總線設置中選擇 CAN CUSTOM PROTOCOL波特率根據MC050控制器的CAN參數做相同設置,如圖2。

圖2 CAN總線的波特率設置
對觸摸屏進行圖形組態后在Kinco軟件安裝目錄里找到builddriver文件夾并打開fbserver文件,自定義CAN通訊協議驅動代碼需要在該文件內進行編程實現。如圖3。

圖3 選擇CAN通訊協議驅動代碼
1.1 觸摸屏發送數據
觸摸屏作為一款在工業以及工程機械中常用的人機交互裝置通常用來顯示設備信息和輸入相關控制數據。在輸入數據的時候輸入一個數據大約需要3~5 s,因此從觸摸屏向控制器發送數據的實時性要求并不是特別高[3]。但是由于CAN總線是典型的多主總線,通常要聯接多個控制器進行實時數據共享,為了提高系統的實時性和總線帶載能力,通訊協議要盡量節約總線負載。同時考慮到觸摸屏要實時顯示大量控制器信息,那么向控制器發送數據報文要盡量簡潔。
發送數據工作原理是在觸摸屏通電啟動后首先設定CAN通訊程序循環周期,并讀取所有待發送數據的初值。在后續的每個循環周期中讀取每個待發數據的實時值,并與上次循環所讀取的數值進行比較,如果本次循環所讀取的待發數據實時值與上次循環所讀取的實時值不同,則認為該值是通過觸摸屏被輸入或修改的數據。通過代碼對該數據進行打包并發送到控制器。
程序框圖4如下:
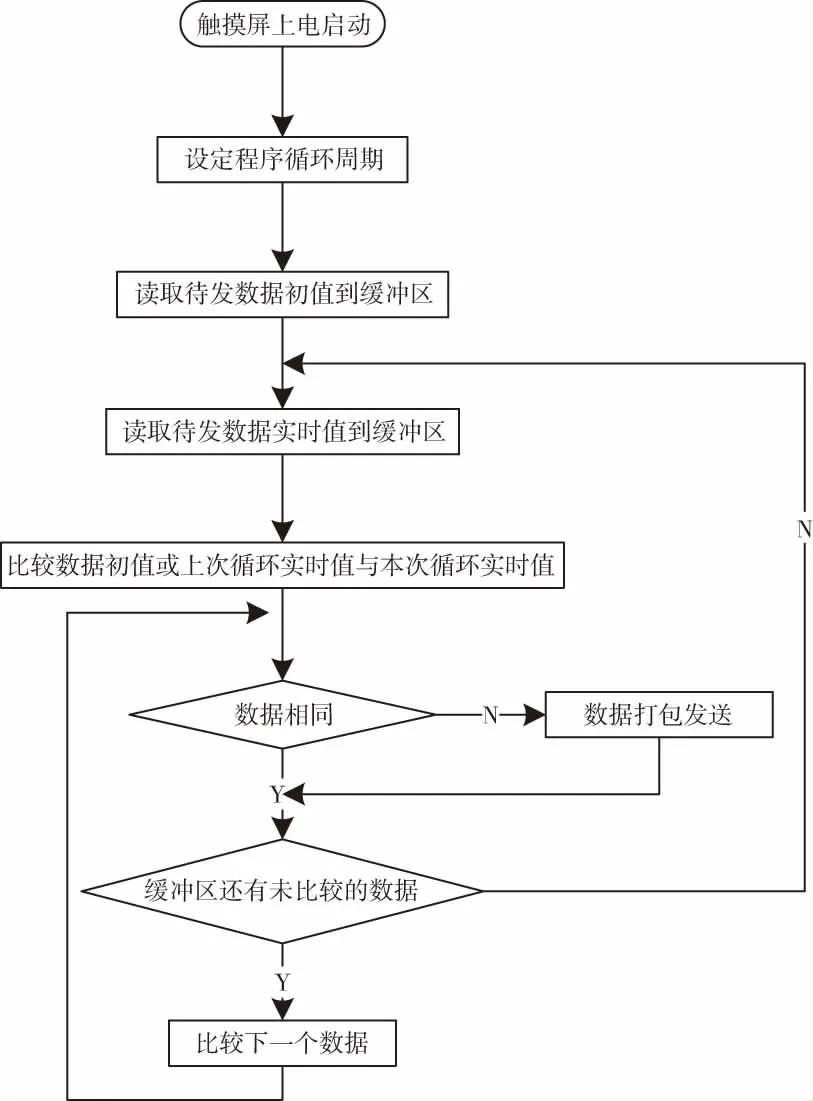
圖4 程序框圖
代碼如下:
void Init(CAN_PORT CanPort) //程序初始化
{
Set_Cycle(50); //設置循環處理時間50ms
pCANPort = CanPort;
CopyFromLW(8400,Buf,70); //復制觸摸屏內存LW8400開始的70個字節數據到緩沖區Buf
memcpy(ReadBuf1,Buf,70); //通過內存復制把字節數據轉換成16位數據
}
void main_process(CO_Data* d,UNS32 id)//循環處理程序
{
unsigned short i;
Message Msg;
CopyFromLW(8400,Buf,70); //重新讀取觸摸屏內存數據
memcpy(ReadBuf2,Buf,70);
for(i=0;i<36;i++)
{
if(ReadBuf1[i]!=ReadBuf2[i]) //與上次讀取的內存數據進行比較當數據發生改變后打包發送
{
ReadBuf1[i]=ReadBuf2[i];//更新原數據以備下次循環對比使用
Msg.cob_id.w=0x182; //觸摸屏發送數據采用固定節點號
Msg.rtr=0;
Msg.len=3; //數據長度固定為三個字節
Msg.data[0]=i;
Msg.data[1]= Buf[i*2];
Msg.data[2]= Buf[i*2+1];
Send_Msg( pCANPort,&Msg,0);
}
}
}
1.2 控制器接收數據
DanFoss MC050控制器循環接收觸摸屏發送過來的CAN數據幀,該數據幀是以固定節點號發送。包含3個字節數據,第一個字節數據作為索引字節表示后續的兩個數據字節所對應的控制器參數,后續兩個字節代表所對應的參數數值。程序流程圖如圖5。
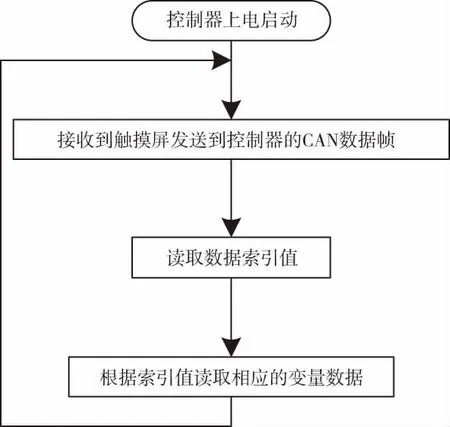
圖5 控制器接收數據流程圖
PLUS+1GUIDE是一款圖形化編程軟件,具有簡潔易懂等特點。針對上述流程圖編程如圖6。
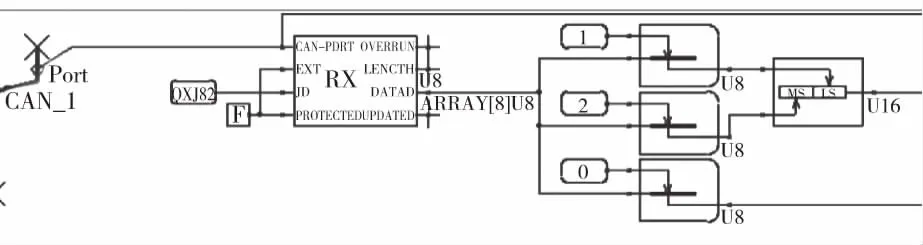
圖6 控制器接收數據編程示意圖
在程序中設置MC050控制器始終接收觸摸屏發送的以0X182為節點號的CAN總線數據幀,數據長度為3個字節。并把數據幀中最后兩個字節數據封裝成16位無符號整型數據。
如圖7所示,設置所接受的數據索引號為9。當接收到索引號為9的數據時,首先讀取控制器內部相應存儲器數值與接收到的數值進行比較。當所接受的數據與控制器中所存儲的數據數值不相等時,將所接收的數據存儲到相應的存儲器中,同時輸出到MC050數據總線供后續程序使用。

圖7 設置接受數據的索引號
1.3 控制器發送數據
鑒于MC050控制器所發送到觸摸屏的數據量比較多,為了盡量節約總線帶寬、降低總線負載并充分利用每個所要發送的數據幀,對每個待發數據幀單獨分配一個節點號,并盡量使每個待發數據幀的8個數據字節保持填滿狀態。
針對圖8編程如圖9圖10,設置每個數據幀循環發送周期為400 ms,每幀8個數據字節。
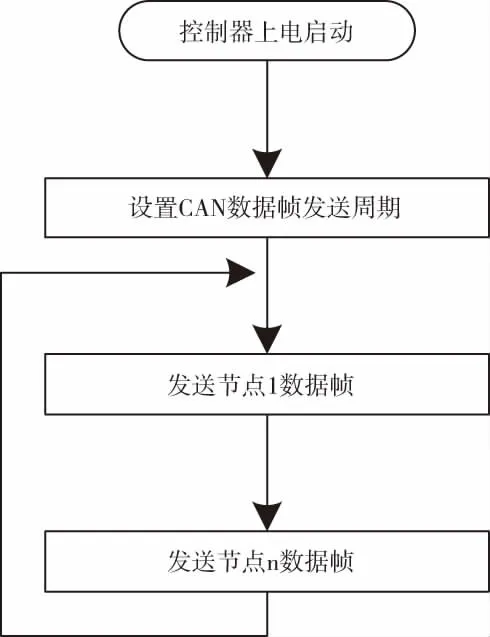
圖8 控制器發送數據編程框圖
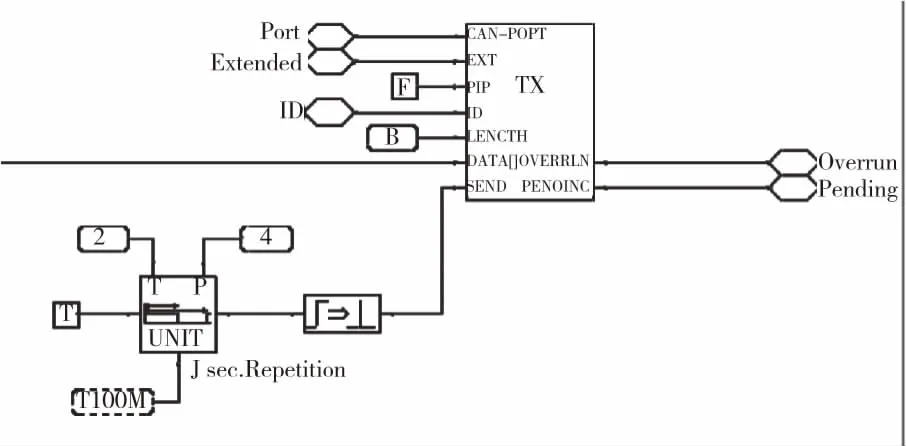
圖9 控制器發送數據流程圖
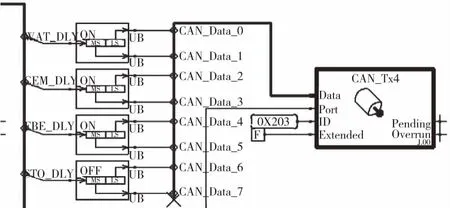
圖10 設置發送數據的索引號
發送數據,設置該幀CAN ID為0X203和非擴展幀并把每個待發的16位數據分解為字節數據輸入到幀數組中,使每個幀數據包含8個字節數據。
1.4 觸摸屏接收數據
Kinco MT4414T觸摸屏接收MC050控制器發送過來的所有以0X200為起始CAN ID的數據幀,并以CAN ID為地址索引把數據寫入到對應的內部存儲器中。程序代碼如下:
void MsgDispatch(CO_Data* d,Message *m)
{
unsigned short Temp;
Message msg;
memcpy(&msg,m,sizeof(Message));
Temp=8000+(msg.cob_id.w-0x200)*4;//以接收到數據幀的節點號作為索引存放接收到的數據
CopyToLW(Temp,msg.data,8);
}
2 編譯觸摸屏程序并生成驅動文件
fbserver程序編寫并保存后重新打開圖3文件夾,并運行該文件夾內的build批處理程序。build程序運行后將對fbserver文件進行編譯并生成CAN CUSTOM.so 和Can custom.ge兩個驅動文件,并自動保存在Kinco組態軟件安裝目錄lib文件夾下的fieldbus driver目錄中。對觸摸屏組態程序進行全部編譯并下載到觸摸屏中進行通電測試。MC050程序通過PLUS+1GUIDE軟件編譯后采用PLUS+1Server Tool軟件下載并監控。在MC050控制器以250 k波特率400 ms周期發送70個16位數據情況下采用PLUS+1Server Tool軟件監控測試總線負載率達到9%。為后續加載其他CAN通訊裝置預留了足夠的通訊閾度。
3 結論
本文以Kinco MT4414TE觸摸屏和DanFoss MC050控制器為研究對象,分析了該觸摸屏和控制器的CAN通訊特點,并通過重新生成底層驅動的方式設計了自定義CAN通訊協議。該通訊協議充分利用了CAN總線的多主特性對通訊帶寬進行了充分的壓縮,有效地降低了總線負載[4]。并在MOH半柔性攤鋪機上經過實際應用,取得了較好的使用效果和經濟效益。
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
水上消防(2020年5期)2020-12-14 07:16:18
中國畢業后醫學教育(2020年5期)2020-12-06 06:52:46
鐵道通信信號(2019年7期)2019-10-08 08:38:02
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
鐵道通信信號(2018年1期)2018-06-06 02:27:38
玩具世界(2017年9期)2017-11-24 05:17:29
作文評點報·低幼版(2017年42期)2017-11-16 22:12:34
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
