基于OpenGL的視頻車速解算虛擬仿真試驗
2021-07-14 05:33:52韓天園許江超蔡鵬亮
重慶理工大學學報(自然科學) 2021年6期
關鍵詞:模型
韓天園,王 鵬,許江超,蔡鵬亮,張 瓊
(1.長安大學 汽車學院,西安 710000;2.中國汽車技術研究中心有限公司,北京 100070;3.人民交通出版社股份有限公司,北京 100011)
據統計,2019年我國共發生了247 646起交通事故,造成62 763人死亡和256 101人受傷[1]。超速行駛與速度控制不當是事故的重要誘因[2],因此,車速鑒定是查明事故原因、判定事故責任的關鍵。目前道路交通事故車速鑒定主要通過車輛運動-動力學[3]、動量守恒[4]、事故庫數據(經驗)[5]、計算機差分仿真計算[6]、監控[7]與車載攝像[8]的視頻圖像車速解算和車載記錄設備數據讀取[9]等方法,其中基于視頻圖像的車速檢測方法技術簡單、成本低、畫面直觀,提取出的車速、運動軌跡等事故信息信服度高[10],是事故鑒定的優選方案。
基于視頻圖像的事故車速檢測方法本質是通過幀差研究車輛運行的時空關系[11]。根據攝像位置與參照物選取將視頻圖像車速解算方法大致分為道路固定攝像與車體參照物、道路固定攝像與環境參照物和本車車載攝像與環境參照物3種[12],而車輛縱向行駛距離在空間上形成的透視關系會導致車速解算偏差[13]。確切的車速解算誤差范圍是視頻圖像事故鑒定公正性的關鍵。李鵬[14]通過相機標定和對檢測區域進行網格劃分來解算圖像車速,宋濤等[15]提出一種基于運動矢量直方圖反映車輛運動速度的大小的方法,最終經實車測試車速誤差范圍約為10%。Han[16]通過比較基于車載攝像和基于GPS的估計車速,以證明視頻車速解算的適用性。Kim等[17]采用Vbox測試基于視頻圖像的事故車速解算誤差。然而無論實車試驗、GPS或Vbox驗證都不能消除車速控制誤差和傳感器檢測誤差,運用不確定的“真實車速”去驗證車速解算誤差缺少說服力。基于可視化的車輛運動仿真模擬試驗可以精確控制車速,完成不同車速下的視頻車速解算誤差分析。
例如Car-Sim、Pc-crash等目前流行的仿真軟件主要應用于車輛動力性仿真,而在車輛可視化運動性仿真試驗中人機交互性差、視覺表現不逼真[18-19]。隨著虛擬現實技術與信息技術的快速發展,基于OpenGL的三維虛擬仿真被廣泛應用于現代機械運動控制[20]。3DMAX三維模型通過OpenGL實現三維圖像可視化和漫游[21]。本文基于Visual C++平臺搭建OpenGL三維模型環境后,開發了車輛運行場景仿真系統以研究基于視頻車速解算方法的準確性。
1 車輛運行場景仿真系統的開發
車輛運行場景仿真是指車輛三維模型在虛擬道路場景中運動的可視化仿真,為模擬相機對車輛發生道路交通事故時的空間運動過程的視頻圖像,考慮該視頻圖像解算事故車速和探究解算結果的可靠性,基于Visual C++與OpenGL開發了車輛運行場景仿真系統。系統通過OpenGL圖形接口將3D MAX繪制的車輛、道路等三維模型(“.3DS”)導入系統,并實現三維模型在VC++窗口的可視化、可編輯化與良好的交互性,具體如下。
1.1 三維模型的幾何變換與空間運動
在OpenGL開發環境中glLoadMatrix()命令用來指定M矩陣為當前加載矩陣,而glMultMatrix()命令通過其他變換命令矩陣與當前矩陣M相乘生成新的矩陣M。
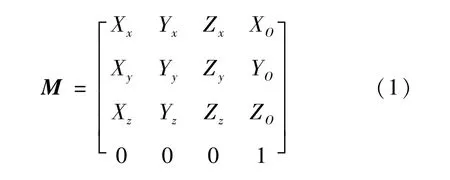
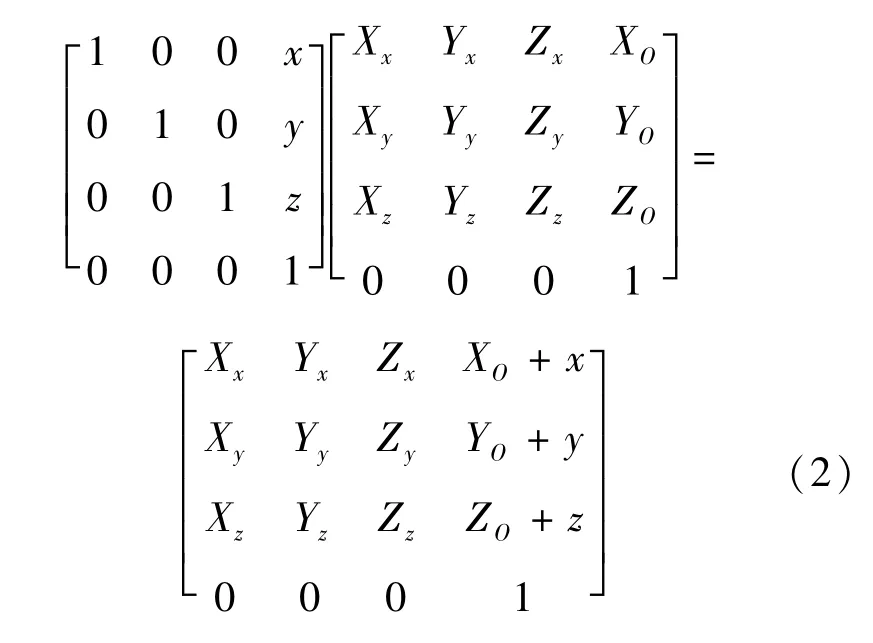
調用平移函數glTranslatef(x,y,z)進行三維圖形的位移變換,如式(1)所示,其中參數x、y、z分別表示對象沿3個坐標軸移動的偏移量。
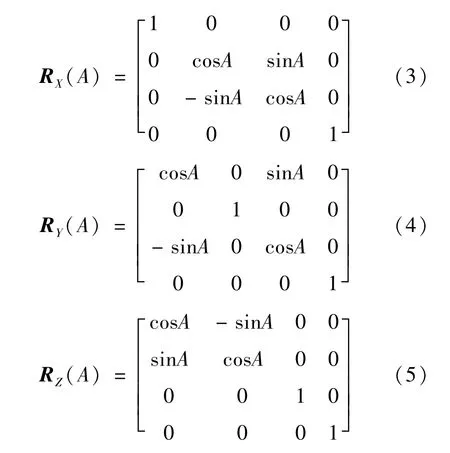
調用旋轉函數glRotatef(A,x,y,z)進行三維圖形的方向變換,其中(x,y,z)坐標來確定旋轉軸,參數A表示旋轉角度。如式(2)所示,RX(A)、RY(A)、RZ(A)分別為繞3個坐標軸旋轉變換之后的矩陣。
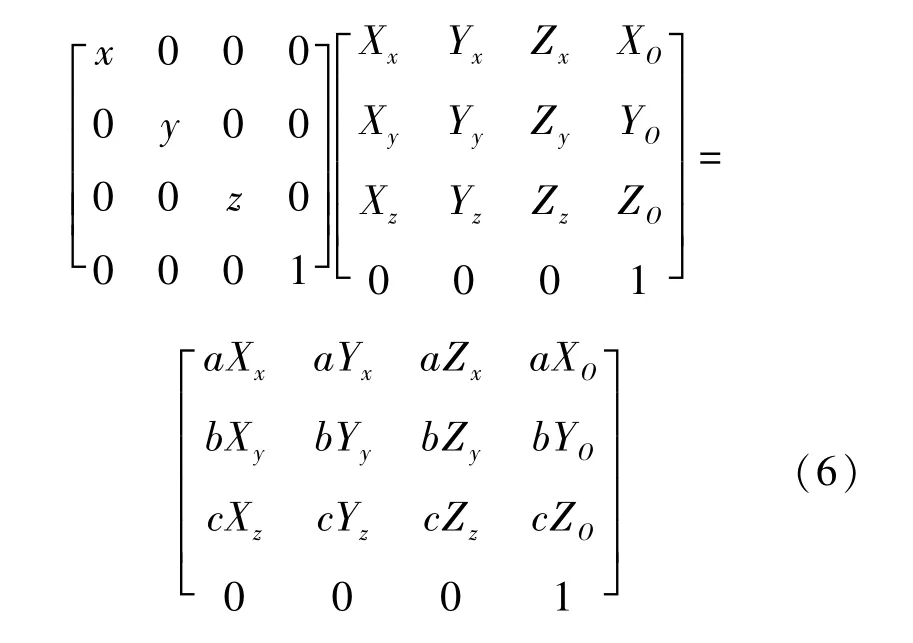
調用縮放函數glScalef(x,y,z)進行三維圖形的尺寸變換,如式(1)所示,其中參數a、b、c為沿3個坐標軸縮放的比例因子。
數據分析用SPSS18.0系統;計量(±s),t檢驗;計數(n,%),X2檢驗;P<0.05指有差異,符合統計學意義。
1.2 相機模型的參數設置與視圖變換
1.2.1 虛擬相機模型構建
實際相機拍攝實質是一個透視投影過程,不同的橫向視角和焦距大小參數有不同拍攝效果,其中鏡頭決定視角和焦距大小。
在OpenGL中,則通過透視投影函數gluPerspective(fovy,aspect,zNear,zFar)模擬相機參數,其中“fovy”表示視野的角度,范圍在0°~180°,角度越大,視野越開闊,物體在視口中顯示越小;“aspect”為寬高比,默認值為1;“zNear”表示視點與近裁面的距離,“zFar”表示視點與遠裁面的距離,如圖1所示。通過調整透視投影各參數實現相機模型參數的設置。
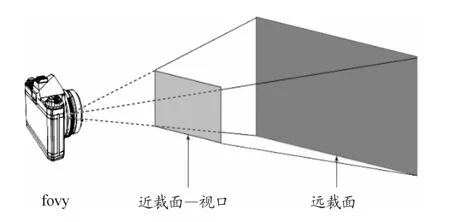
圖1 gluPerspective()函數透視關系
1.2.2 世界坐標系中的相機定位
基于視圖函數gluLookAt(eye x,eye y,eye z,center x,center y,center z,up x,up y,up z)模擬相機機位設置原理,類比于實際相機的三腳架,并將鏡頭指向要拍攝的場景,其中“eye”為相機視點坐標,“center”為觀察中心點坐標,“up”是相機正向姿態坐標,同時相機對象坐標系S-x′y′z′的z軸穿過“up”點。由“eye”為起點指向“center”為終點的空間向量確定了相機唯一的拍攝方向,由“eye”為起點指向“up”為終點的空間向量確定了相機唯一的拍攝姿態。基于上述坐標點與空間向量表征了虛擬相機、觀察目標相對于世界坐標系的空間關系,如圖2所示。
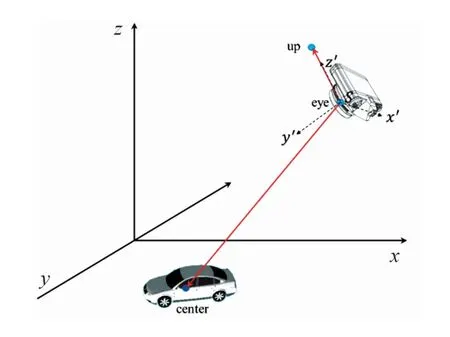
圖2 世界坐標系中的相機定位
通過調整“eye”“center”和“up”坐標參數完成相機的空間定位,模擬不同交通場景中不同的相機。
1.3 車輛運行場景仿真系統功能與結構
所開發的車輛運行場景仿真系統如圖3所示,通過調用平移函數glTranslatef(x,y,z)、旋轉函數glRotatef(A,x,y,z)和縮放函數glScalef(x,y,z)命令表征與控制車輛等虛擬模型的空間坐標與運動,實現車輛運動、道路參數構建和路燈、道路景觀等模型在世界坐標系中的數字化匹配與定位。通過調用透視投影函數gluPerspective(fovy,aspect,zNear,zFar)仿真照相機模型的透視原理和通過視圖變換函數gluLookAt(eyex,eyey,eyez,centerx,centery,centerz,upx,upy,upz)設置虛擬相機拍攝方位,最終實現了車輛運行場景仿真系統的車輛自主運動、場景數字化編輯、視角自由切換,如圖4所示。
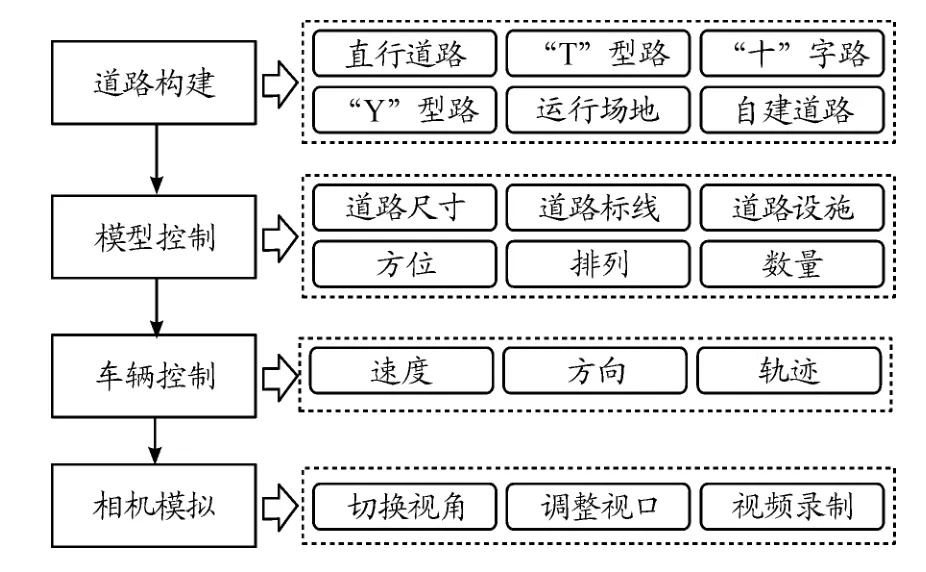
圖3 車輛運行場景仿真系統結構
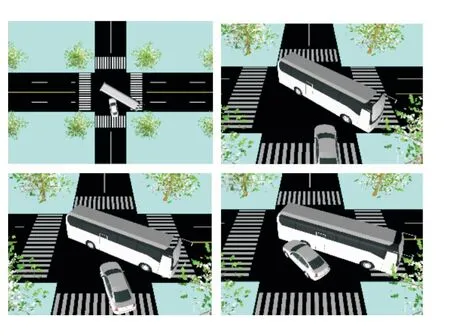
圖4 三維車輛運行仿真場景
2 仿真試驗
2.1 試驗設計
2.1.1 試驗場景設置
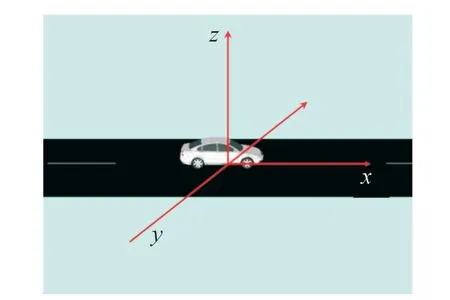
圖5 三維虛擬交通試驗場景
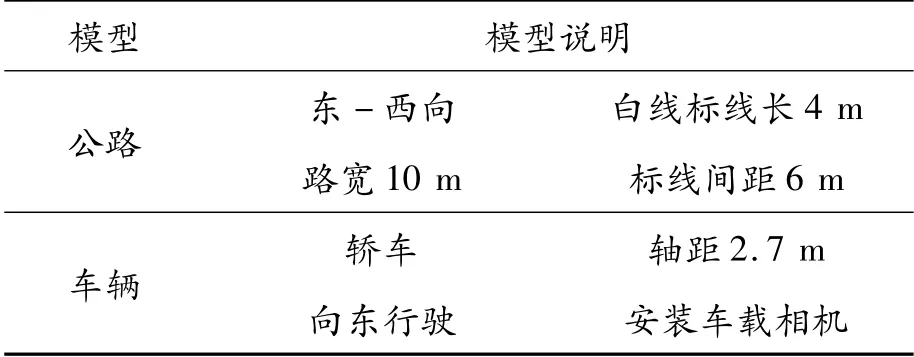
表1 車輛與場景的空間關系
2.1.2 相機機位設置
由于相機的搭載方式和搭載位置的不同,用于視頻圖像車速解算的空間距離參照物的選取不同。依據視頻圖像中參照物與車輛行駛的關系,可將場景分為3類,如圖6所示,(a)場景為固定攝像,可以車軸為參照物,對應道路固定攝像與車體參照物解算法;(b)場景為固定攝像,可以道路標線為參照物,對應道路固定攝像與環境參照物解算法;(c)場景為車載攝像,可以道路標線為參照物,對應本車車載攝像與環境參照物解算法。
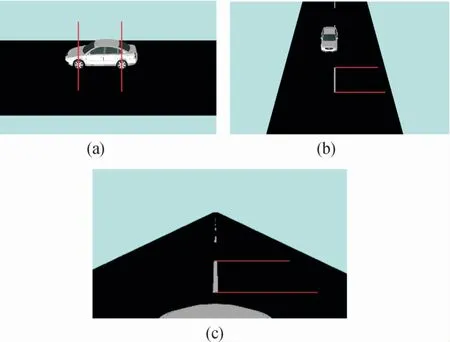
圖6 3種視頻解算方法的應用場景
試驗分別設置了3個相機模型以對應3種車速解算方法。試驗時,分別調整固定相機1、固定相機2和車載相機的相機參數和拍攝機位,模擬車輛在模擬道路上行駛并錄制為視頻圖像。3個相機模型的gluLookAt()函數各參數如表2所示。
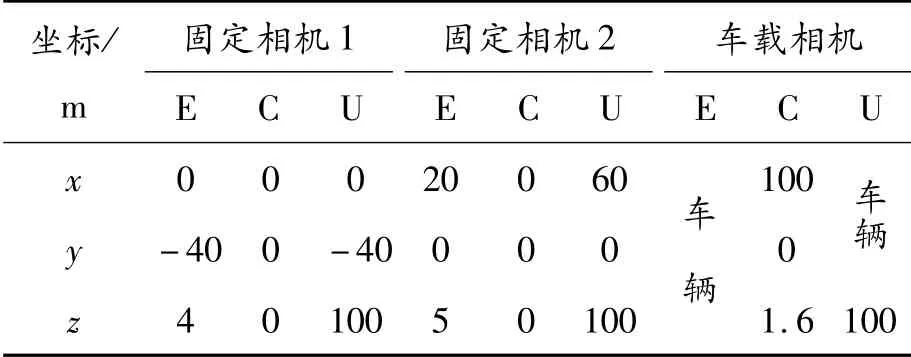
表2 相機機位設置
2.1.3 試驗方案設置
針對3種視頻圖像車輛行駛車速解算方法分別設置了3個試驗,每個試驗設置了30 km/h(低速)、60 km/h(中速)和90 km/h(高速)3組車速,每組車速連續解算10次。試驗時,車輛以確定車速由西向東行駛,模擬相機錄制試驗過程圖像后,選擇車體參照物或環境參照物,并用對應方法解算出行駛車速。試驗設置如表3所示。
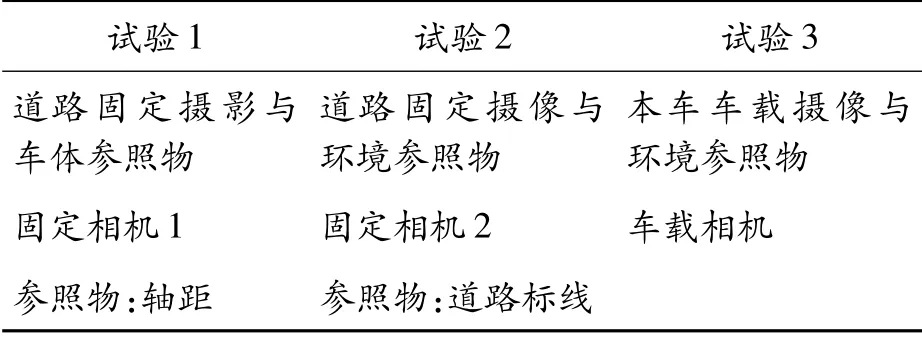
表3 試驗相機與參照物設置
2.2 試驗數據處理
2.2.1 車速解算原理
《基于視頻圖像的車輛行駛速度技術鑒定》(GA/T 1133—2014)中規范了視頻圖像車速解算方法和要求。視頻圖像記錄了車輛運動的時空信息,確定視頻圖像幀率f,由式(1)計算得到相鄰兩幀間隔時間t,選取距離參照物特征點并獲取兩特征點距離S′,確定車輛經過兩特征點所用的幀數n(n1,n2),n1為經過特征點的上一幀,n2為經過特征點對應幀數。

則車輛行駛車速v范圍為:
基于圖像像素可近似計算經過參照物兩特征點的幀數N,m1、m2分別為n1、n2幀距離參照物特征點的像素。則幀數N約為:

因此在事故視頻中,車輛行駛車速v為:
2.2.2 試驗車速解算
依據式(10),分別基于道路固定攝影與車體參照物解算法(a)、道路固定攝像與環境參照物解算法(b)和本車車載攝像與環境參照物解算法(c)解算試驗視頻車速。解算結果如圖7所示。
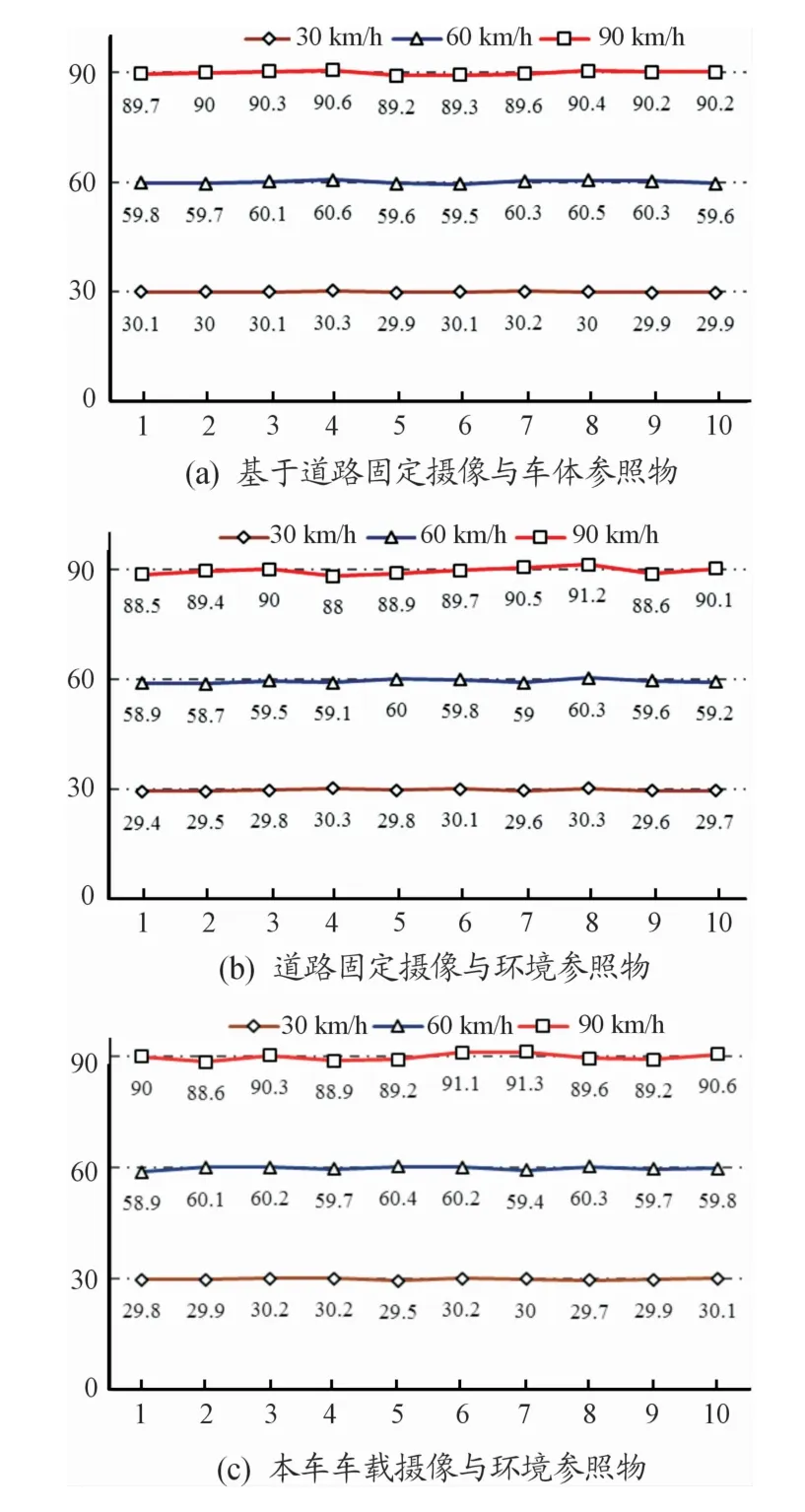
圖7 試驗視頻車速解算
2.3 試驗結果分析
在試驗車速范圍內,基于道路固定攝像與車體參照物解算法解算結果的相對誤差明顯最小,約為1%;基于道路固定攝像與環境參照物解算法解算結果的最大相對誤差不超過2.2%,基于本車車載攝像與環境參照物解算法解算結果的最大相對誤差不超過1.8%,如圖8所示。3種方法相比,基于道路固定攝像與車體參照物解算法的準確度最高,基于道路固定攝像與環境參照物解算法解算的準確性最差。
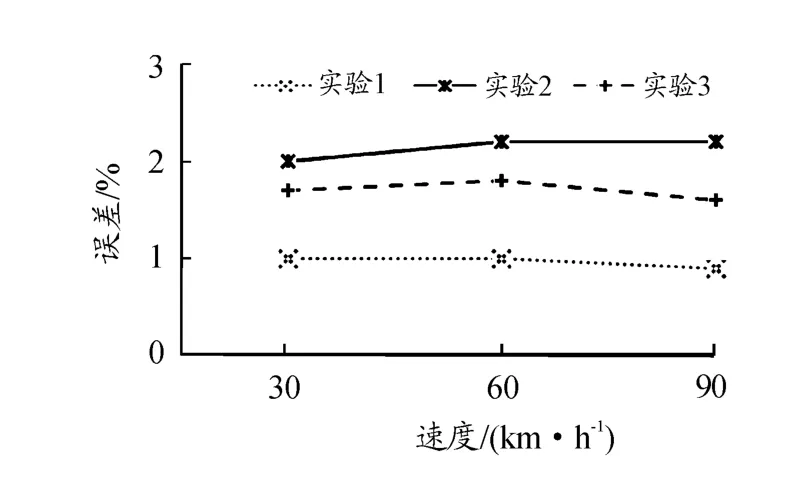
圖8 試驗車速解算誤差分析
為分析基于視頻圖像車速解算的3種方法和實際車速對解算相對誤差的顯著性影響,通過計算所解算車速的最大相對誤差數據的離差平方和與均方離差,構建自由度為(r-1,(r-1)(s-1))的F分布,通過雙因素方差分析方法(無重復雙因素分析)評價不同試驗方法(因子A)和車輛運行速度(因子B)對解算車速誤差的顯著性影響。
現給定顯著水平α=0.05,已知Fα(2,4)=6.944 3,方程分析結果如表4所示。則FA(2,4)>F0.05(2,4),FB(2,4)<F0.05(2,4)。因此,3種試驗方法的選擇(因子A)對解算車速相對誤差的影響顯著,但車輛運行速度(因子A)對解算車速相對誤差影響不顯著。說明,基于視頻的車速解算方法適用于對不同事故車速的解算。
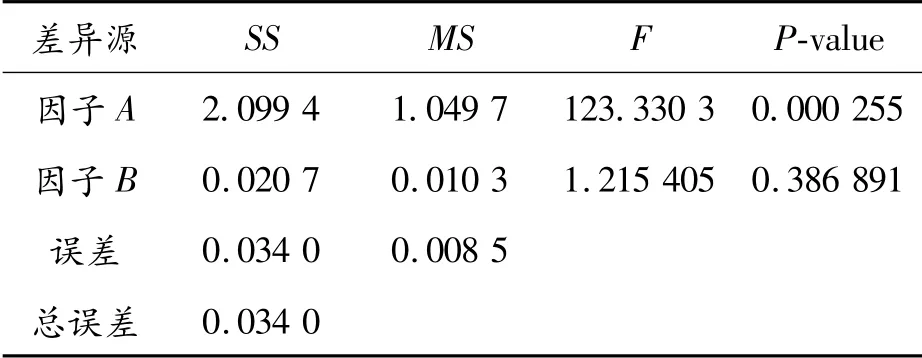
表4 二元方差分析
3 結論
基于Visual C++平臺搭建OpenGL三維模型環境后開發了車輛運行場景仿真系統,完成3D MAX繪制的車輛、道路等模型在V C++窗口的可視化。系統通過OpenGL命令函數控制三維模型在世界坐標系中的幾何變換與空間運動,通過OpenGL命令函數構建相機模型與控制視圖切換,構建的車輛運行場景視覺逼真,交互優良,實現了車輛的自主運動、場景的數字化編輯和視角的自由切換。
基于所構建的交通場景和相機模型記錄了車輛縱向運動的視頻圖像,并分別使用道路固定攝像與車體參照物、道路固定攝像與環境參照物、本車車載攝像與環境參照物3種方法解算視頻車速,通過與實際車速對比發現,基于道路固定攝像與車體參照物解算法的誤差最小,基于道路固定攝像與環境參照物解算法解算的誤差最大。
采用雙因素方差分析方法評價不同試驗方法和車輛運行速度對試驗結果的顯著性影響。分析表明,顯著水平α=0.05時,試驗方法的選擇對解算車速相對誤差的影響顯著,車輛運行速度對解算車速相對誤差的影響不顯著。
所開發的車輛運行場景仿真系統不能模擬現實車輛運動所致的車載相機畫面的抖動,因此,在理論上基于本車車載攝像與環境參照物的試驗車速解算的誤差小于實際誤差。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
