
基于SolidWorks的虛擬調試系統設計與實現*
2021-07-14 08:33:46計詩軒
機電工程技術 2021年4期
計詩軒,周 馳
(華南理工大學機械與汽車工程學院,廣州 510641)
0 引言
在世界各國為實現智能制造爭先出臺先進制造戰略的大背景下,產品制造過程中信息世界和物理世界之間的交融成為了智能制造的主要瓶頸之一。數字孿生技術[1-3]充分利用物理模型、傳感器更新、運行歷史等數據,集成多學科、多物理量、多尺度、多概率的仿真過程,在虛擬空間中完成映射,從而反映實體裝備的全生命周期過程,正成為解決該問題的關鍵技術。
虛擬調試[4-5]作為數字孿生技術的一個重要分支,可以在設備實體投入生產之前,通過用控制信號驅動CAD三維模型運動來仿真實際設備的工作情況,及早發現和解決機電設計中的問題,縮短自動化設備研發周期,并減少現場調試工作量。虛擬調試技術是國內外學者研究的熱門問題。禹鑫燚[6]在RoboDK平臺對機器人加工系統進行虛擬調試,改善PLC程序設計的不合理之處。孫萌萌[7]設計了基于CPS格模型和Moore型有限狀態機的飛機總裝配生產線虛擬調試系統,避免了傳統飛機裝配工藝存在的問題。胡凡成[8]基于3dMax和Unitu3D平臺,采用流程化的方法構建了該企業打樣車間的虛擬調試系統,解決了車間生產效率問題。
虛擬調試技術也受到國外的一些軟件公司的重視。西門子公司基于NX/MCD、TIA體系,使得設計人員可對機電一體化設備進行3D建模和仿真。達索公司推出了Delmia,配合Catia進行數字化產品虛擬調試。PTC公司研究數字紐帶類似概念,在虛擬空間和物理空間構建一個數字紐帶系統,為客戶提供高效的產品售后服務與支持。
本文對自動化設備虛擬調試系統進行系統架構設計,對信號接口和機構運動學建模和解算等虛擬調試系統核心問題進行研究。在SolidWorks平臺上利用二次開發技術,完成對虛擬調試系統的實現。以機器人智能倉儲設備為例,完成對虛擬調試系統的實驗驗證。
1 系統結構設計
虛擬調試系統由PLC控制器、OPC Server、信號數據接口模塊、運動仿真模塊、移載功能模塊、CAD平臺模塊6部分組成,如圖1所示。

圖1 虛擬調試系統架構
(1)PLC控制器模塊。該模塊作為虛擬調試系統的信號輸入,可分為PLC控制器和虛擬PLC控制器。本虛擬調試系統支持硬件在環和軟件在環兩種調試模式。
(2)OPC Server模塊。該模塊作為虛擬調試系統信號輸入的中間層,使用OPC UA標準協議與其他模塊進行連接,上承PLC控制器模塊,將輸入信號傳遞給信號接口數據模塊。該模塊使得不同的PLC控制器平臺可采用同一套接口與信號數據接口模塊進行通訊。
(3)信號數據接口模塊。該模塊實現了控制信號的獲取、將控制信號與運動副、傳感器綁定的功能。
(4)運動仿真模塊。該模塊基于運動副和運動組的約束模型,采用自主開發的機構運動學求解算法,完成機構運動學解算功能。
(5)移載功能模塊。采用自主開發的接觸模型,建立移載構件間的面面之間的距離傳感器,若觸發距離傳感器,則改變運構件間的連接關系,完成對運動仿真模塊約束模型的更新,而實現移載功能。
(6)CAD平臺模塊。該模塊是虛擬調試系統的主體模塊。可通過交互選擇功能對機構特征的選取,獲取構件的幾何、位置、屬性等信息,創建運動約束和傳感器。由運動仿真模塊的求解結果完成構件位置更新、顯示功能,同時依據CAD平臺內部相關干涉檢查接口,實現虛擬調試過程中進行干涉檢查功能。
虛擬調試系統流程如圖2所示。PLC控制器與OPC Server通過OPC UA接口協議進行信號傳輸,完成PLC控制器信號的輸入功能;OPC Server與信號數據接口模塊也采用OPC UA接口協議進行信號傳輸,實現OPC Server中信號讀取功能;用戶選取CAD平臺中的自動化設備的3 D模型特征,創建距離傳感器,實現傳感器模擬,創建運動副、運動組約束,完成虛擬數字模型的約束模型建立;將I/O信號與運動副、傳感器綁定,完成約束模型的驅動和反饋信號創建;使用運動學求解器完成對約束模型的求解,實現3 D模型位置更新;更新位置后利用CAD平臺功能接口,實現干涉檢查。

圖2 虛擬調試系統流程
2 信號數據接口模塊
本虛擬調試系統選取KEPServer作為OPC服務器,兩個模塊間采用OPC UA標準協議進行通訊。OPC協議是便于不同廠商的PLC設備和應用軟件進行數據交互的一種標準協議,而OPC UA標準協議是對OPC協議的擴展,包含了OPC的所有接口協議,并且不再依賴過時的COM/DCOM技術,兼容了更多的平臺。OPC UA標準協議建立在TCP/IP傳輸層之上,底層采用Socket進行進程間通訊。
信號數據接口模塊需要和OPC Server模塊建立通訊連接,完成對OPC Server I/O信號的讀取,同時信號數據接口模塊獲取機構運動學仿真模塊中建立的運動副約束信息,最后將實際模型中的對應的I/O信號與運動副進行綁定,同時本虛擬調試系統支持運動副約束與I/O信號的多重映射關系。作為約束的模型輸入信號。操作步驟如圖3所示。操作界面如圖4所示。
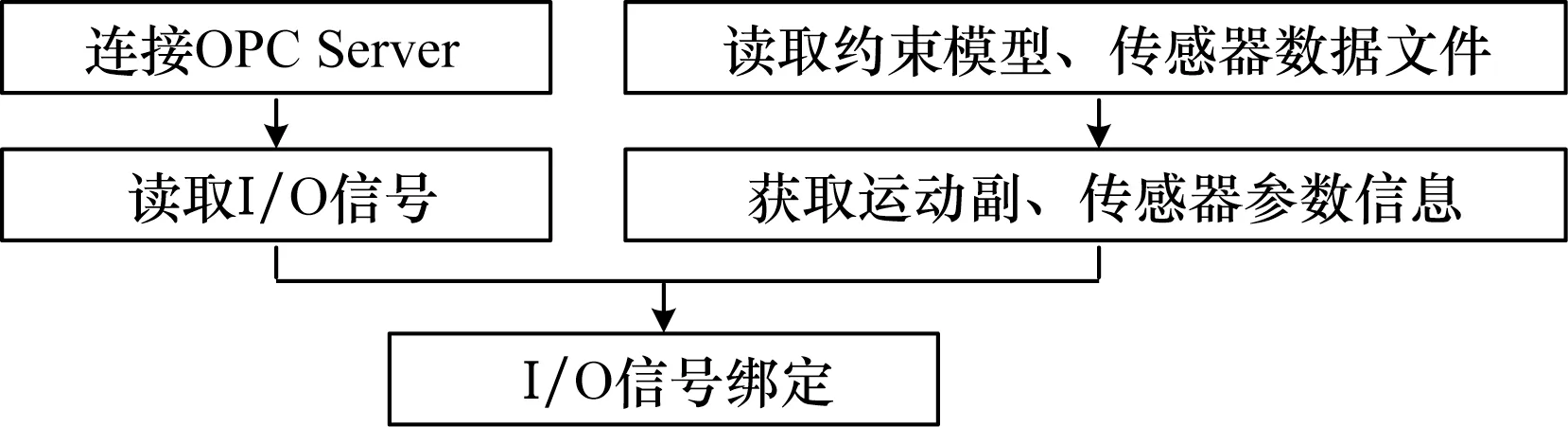
圖3 信號數據接口模塊操作流程
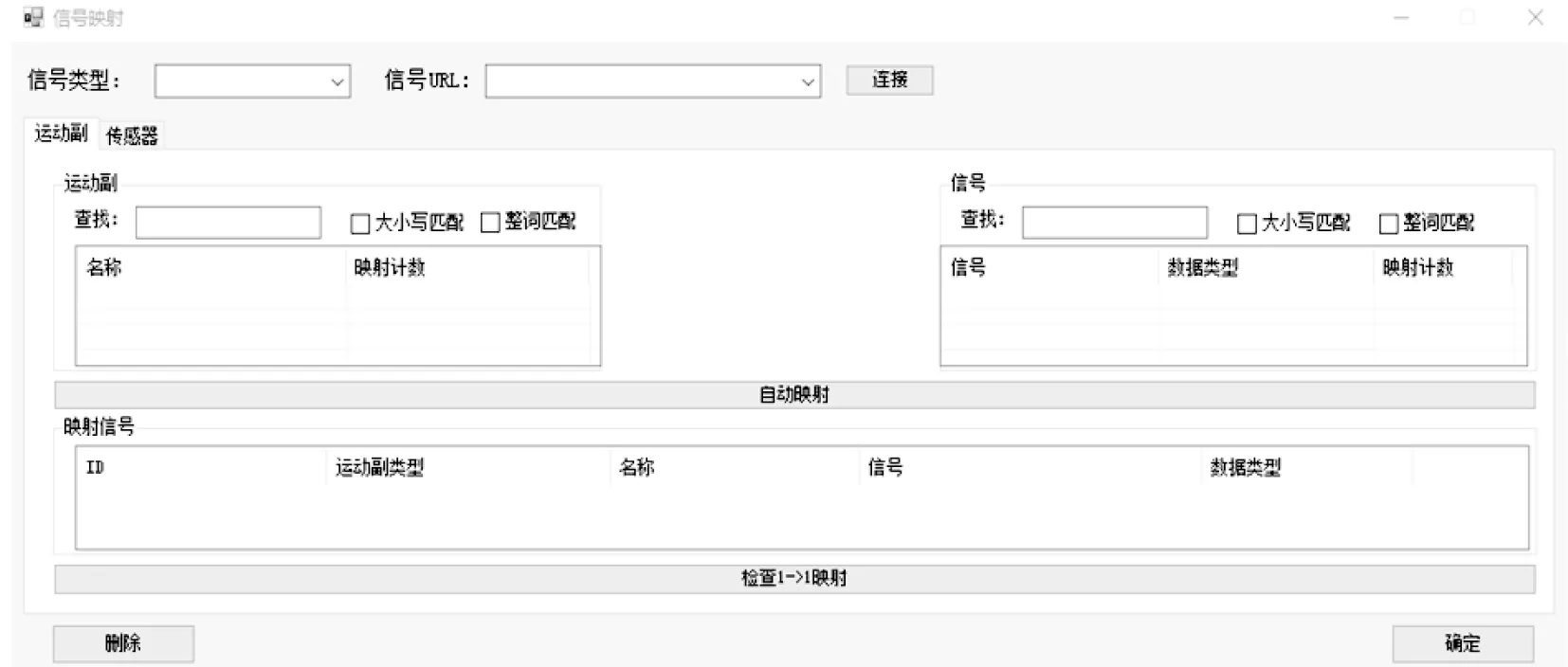
圖4 信號數據接口模塊界面
3 機構運動學建模與位置解算模塊
機構運動學位置求解的本質在于對初始時刻的變換矩陣的計算,本文采用自主研發的運動學引擎進行機構運動學建模與求解。該引擎基于運動副約束、運動組約束、固定約束進行運動學建模和位置求解,約束模型如圖5所示。
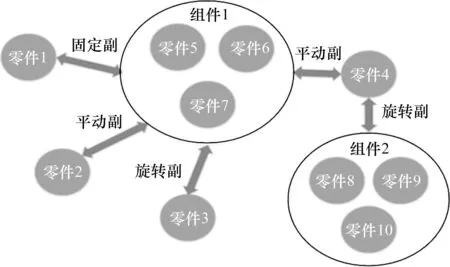
圖5 約束模型
本約束系統的相關定義如下。
(1)運動副約束:描述兩個零件間的相對運動約束,表征相對運動關系。兩個零件分別被定義為參考零件和運動零件。運動零件繞參考零件所創建的運動軸運動;參考零件的運動軸隨參考零件運動。運動副約束可以用運動矩陣的形式表示。兩相鄰的構件之間有一個公共的軸線,兩構件之間構成一個運動副,允許沿軸線或繞軸線作相對運動[9]。該定義表明了定義在兩構件間的常見的運動副約束可轉化成為其中一構件繞另一個構件的定軸移動或定軸旋轉運動,或者其疊加。常見運動副的相對變換矩陣如表1所示。其中T(υ?,l)表示沿著單位向量υ?平移l距離的變換矩陣,R(υ?,θ)表示沿著單位向量旋轉θ角的變換矩陣。輸入信號控制的即為相對初始時刻的距離位移值和旋轉角度值。
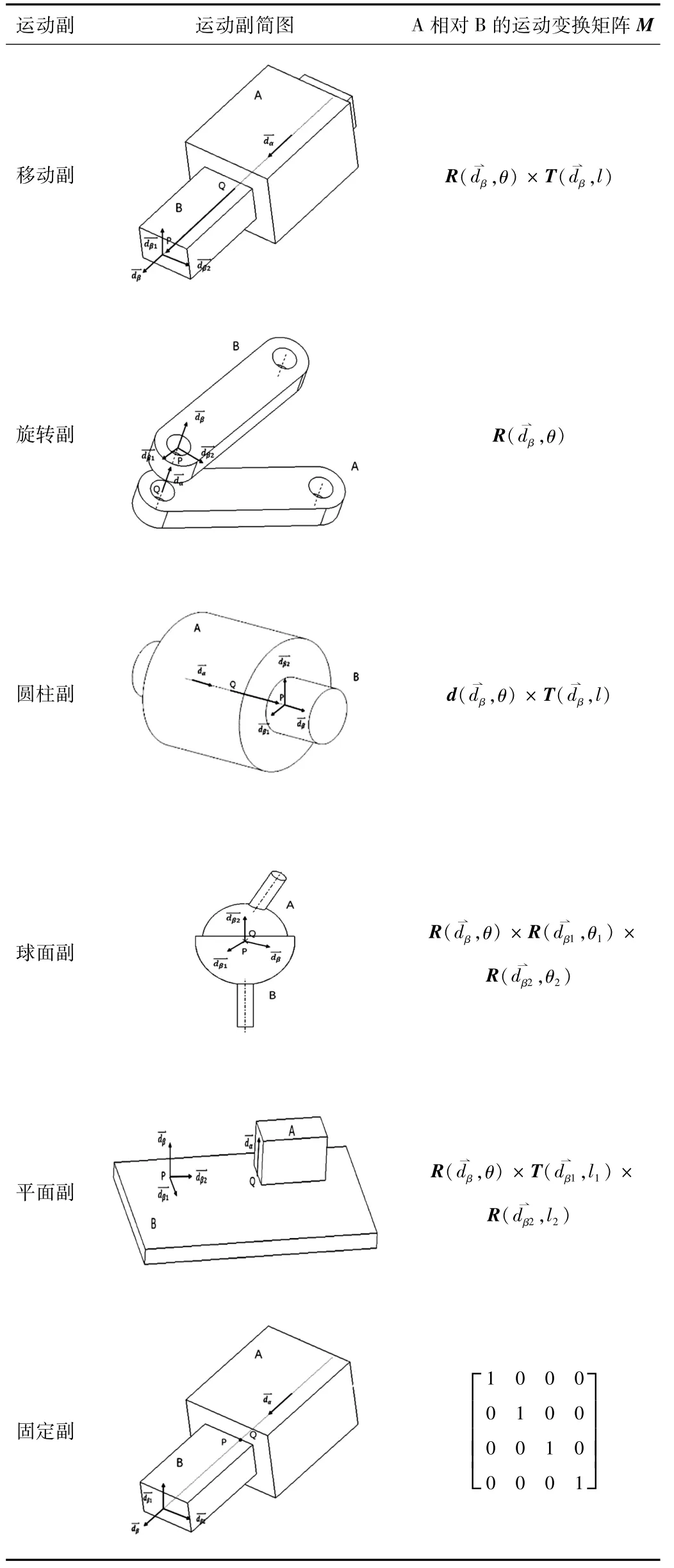
表1 常見運動副的幾何約束方程和相對變換矩陣
創建運動副約束如圖6(a)所示。
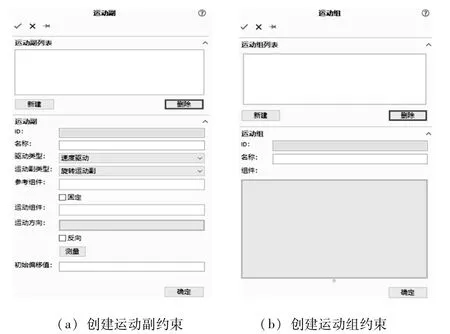
圖6 創建運動約束
(2)運動組約束:將多個零件合并成運動組后,若組內零件與某一組外零件建立運動副約束,且組內零件為運動副約束中的參考零件,則該運動組內其余零件也會與該組外零件建立相同運動約束。概念上可將創建為運動組后的零件可認為是一個一起運動的一個組件。運動組間的零件創建運動副約束如圖6(b)所示。
(3)固定約束:建立運動副過程中,參考零件可選為固定,被選為固定的參考零件,將永遠保持固定狀態,且該零件將標識為運動鏈的起點。
(4)運動鏈:運動鏈是由零件、運動副組成的約束系統。在虛擬調試系統中,運動鏈的起點必須為固定約束的零件。將實際運動模型映射到該虛擬調試系統的過程,實際上是建立多條運動鏈。運動鏈可分為開環運動鏈和閉環運動鏈。
在虛擬調試過程中大部分自動化設備為開環運動鏈系統或者可以忽略掉閉環傳動機構部分。針對開環運動鏈的虛擬調試系統的運動學位置求解算法如下:
(1)根據建立的運動副約束、運動組約束、固定約束,構造約束無向圖;
(2)獲取輸入信號中的運動副驅動參數值,即獲取運動副所對應的繞定軸相對初始時刻旋轉角度和沿著定軸相對初始時刻平移距離;
(3)遍歷每條運動鏈,將無向圖變為以固定約束構件節點為起點的有向圖,則當前時刻運動鏈中的每個構件相對初始時刻的變換矩陣,為運動副約束有向圖中,從固定節點到該節點的每個邊(運動副)上的相對變換矩陣的連乘;
(4)根據初始時刻的構件位置信息,由求解出的變換矩陣完成對構件位置的更新。
與開環機構運動學位置求解相比,閉環機構中的部分運動副,可能存在多個輸入,其位置不能唯一確定。可借鑒裝配問題中的處理方法[10],賦予運動副約束權值,通過最小生成樹算法,切除運動副約束,將閉環運動轉變成開環運動鏈,引入切除運動副的約束方程進行求解。
4 系統驗證開發與應用
本虛擬調試系統以西門子S7-1500作為PLC控制器,KEPServer作為OPC服務器。以C#作為開發語言,Visual Studio 2015為開發IDE,SolidWorks 2018作為系統運行環境,開發了虛擬調試系統,實現了PLC控制器對SolidWorks中的自動化設備進行控制的功能。系統功能模塊如圖7所示。

圖7 虛擬調試系統功能模塊
以智能倉儲設備為例,進行虛擬調試。智能倉儲設備數字模型如圖8所示。該倉儲系統的功能為:旋轉機械臂通過帶傳動在水平導軌和垂直導軌上運動,實現貨架從存儲平臺到出庫平臺、從入庫平臺到存儲平臺的移動。虛擬調試系統將通過模擬這一過程,實現PLC控制器直接對SolidWorks中數字模型控制的目的。
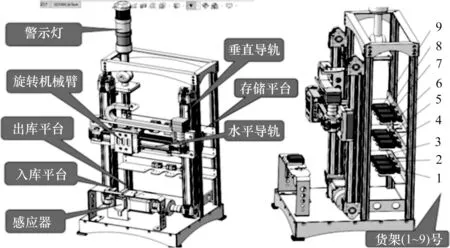
圖8 智能倉儲數字模型
智能倉儲調試流程如圖9所示。

圖9 智能倉儲調試流程
本虛擬調試系統對智能倉儲進行虛擬調試,需建立運動約束、移載接觸、距離傳感器。建立運動約束,主要需建立運動副、運動組約束。根據實際模型,建立了3組運動副約束:垂直導軌移動副、水平導軌移動副、機械臂旋轉副,3組運動組:垂直導軌運動組、水平導軌運動組、機械臂運動組。
在調試中,還涉及到對貨架的移載功能:旋轉機械臂運動到一定位置與貨架發生接觸,機械臂繼續上升,本虛擬調試系統的移載功能原理為:旋轉機械臂和貨架的接觸面、貨架和存儲平臺的接觸面、貨架和出庫平臺的接觸面,這3組接觸面建立距離傳感器,當構件位置更新后,檢測距離傳感器數值,若發生新的接觸,則刪除舊的運動副連接,建立新的運動副連接,完成對約束模型的更新。貨架接觸到入庫平臺會觸發傳感器,作為返回信號發送給PLC控制器,要模擬該過程,需要為感應器表面和貨架下表面添加距離傳感器,當檢測到距離滿足觸發條件時,將向PLC控制器返回觸發信號。
完成調試準備與設定后,搭建了圖10所示的智能倉儲調試驗證平臺。通過PLC控制器的控制信號同時控制虛擬數字模型與實體設備。在實驗過程中,虛擬調試系統能實現設備運動仿真,反饋傳感器信號,記錄干涉數據等功能。該實驗驗證了系統的準確性和可靠性。
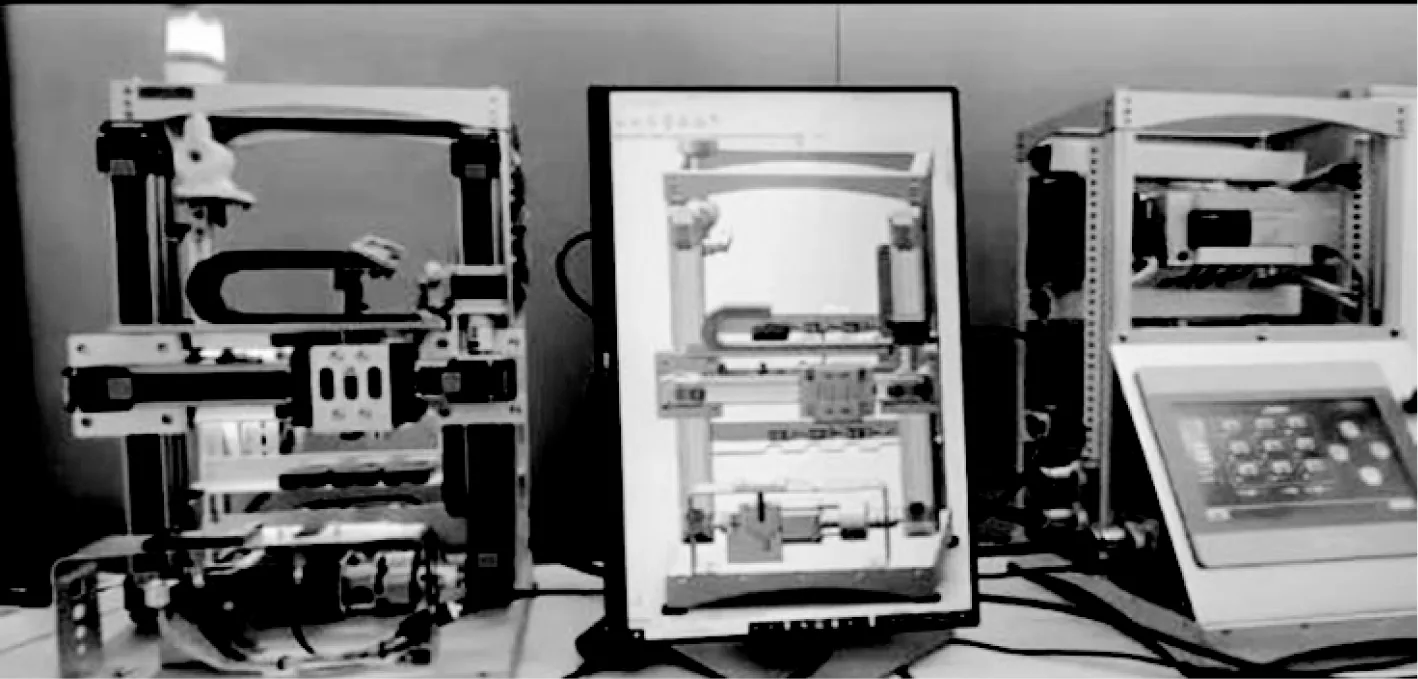
圖10 智能倉儲調試驗證平臺
5 結束語
本文設計了由PLC控制器、OPC Server、信號數據接口模塊、運動仿真模塊、移載功能模塊、CAD平臺模塊組成的虛擬調試系統,并基于SolidWorks平臺完成對虛擬調試系統的開發實現。在智能倉儲設備的虛擬調試過程中,驗證了系統的準確性和穩定性。未來可將本系統用于自動化設備調試領域,實現縮短研發周期、降低調試風險、優化控制程序、優化產品生產節拍、提前消除錯誤的目的。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
電子制作(2018年12期)2018-08-01 00:47:44
制造技術與機床(2017年6期)2018-01-19 02:41:21
電子制作(2017年19期)2017-02-02 07:08:38
光學精密工程(2016年6期)2016-11-07 09:07:19
