海戰場無人機典型作戰應用場景構想
2021-07-15 10:39:52張玉葉王春歆李明珠
軍事文摘 2021年13期
關鍵詞:艦艇
張玉葉 王春歆 李明珠
無人機進入海戰場并非近些年的事情,早在20世紀60年代,反潛無人直升機已經出現。此后,各種型號各種用途的無人機相繼研發。未來,無人機也必將更加廣泛地應用于海戰場,整個海上作戰體系將伴隨無人機的介入實現重構。
無人機戰技術特點
一臺無人機必須具備以下特性:無人機應該要穩定,不可無預警突然震動、搖晃或傾斜;無人機的動作要非常精確;無人機要能抵抗下雨、灰塵、高溫等環境狀況;無人機的低功耗設計;無人機的環境感知能力;具有聯網功能。
無人機的特性決定了其應用領域將比有人飛機要廣泛得多,更能適應高危險、長時間的飛行任務。
航程遠,續航時間長美國掠奪者無人機最大航程400海里,續航時間高達40小時。而全球鷹無人機作戰半徑可達到1200海里,可對一個目標區域留空24小時持續監視。
隱身性強一般無人機的物理面積都遠遠小于有人飛機,能夠適應有人飛機適應不了的低空、超低空飛行。
經濟性好無人機設計結構簡單、重量輕、尺寸小、使用方便、易于操作和維護,所以其研制費、生產成本和維護費要比載人飛機低得多,還可節省培訓飛行員的大量費用。
智能化無人機作戰系統具備與執行任務相匹配的智能控制能力。智能控制不僅表現為可以依據事先的規劃指令和任務實施過程進行最優控制,更重要的是控制系統可以根據自身對內部、外部的感知信息,結合任務需求,自主對路徑、規避、目標選擇等作出決策。
無人機在未來海戰場的典型作戰應用場景
作戰場景一:無人機集群攻擊無人機集群協同攻擊作戰,就是在可能損失部分無人機的條件下,確保任務的完成率,從以平臺為中心,轉變為以作戰任務為中心,可以執行超長時、重復、危險任務。
集群無人機平臺在目標空域中收到攻擊指令時,無人機平臺間進行協同制導控制完成對目標的攻擊,需要解決多約束條件下的協同攻擊問題。主要的作戰樣式有:
第一,大型敵方目標的突防、飽和攻擊與毀傷。通過計算大型敵方目標的各層次設施的毀傷值,顯示僅靠單架無人機平臺打擊效果并不明顯,所以要使用多架無人機平臺進行集群飽和攻擊。根據目標規模大小,發射若干數量無人機,協同展開警戒任務和攻擊任務;高速掠海飛行突防到艦隊區域附近,急劇攀升適當高度釋放;當發現目標時,根據無人平臺協同攻擊策略和聯合火力打擊方案,可實施自主攻擊,也可引導后方火力攻擊,按照打擊優先順序,協同執行攻擊任務。
第二,島嶼登陸作戰中的預警、干擾與協同打擊。估算無人機在飛抵島嶼區域的生存率,計算完成任務需要同時發射的無人機數量;利用艦載平臺隱蔽接近目標區域,以最大數量發射無人機,形成集群發射到任務區域;執行空中預警、戰場偵察與監視、協同火力打擊、電子干擾、誘餌欺騙,以及毀傷評估等任務。
作戰場景二:無人機誘餌對抗艦載戰斗機編隊作戰時,無人機搭載平臺同時釋放無人機誘餌,誘餌數量是編隊中戰斗機數量的2~3倍或者更多。戰斗機編隊與無人機在空中匯合組成混合編隊,無人機編隊在前,戰斗機編隊在后,保持安全飛行距離,采用低空突防方式殲敵。誘餌機與戰斗機飛行速度基本相同,混合編隊隊形與戰斗機編隊類似。

艦載戰斗機編隊對抗階段示意
假設突防開始后,由于雷達探測及隱身性能的差異,敵機雷達會先發現我方編隊,整個作戰過程分為三個階段。
第一階段,敵我雙方距離達到敵機空空打擊距離范圍時,敵機雷達開機搜索截獲我方目標并發射空空彈攻擊。此時,我方被截獲的目標可能是有人戰斗機,也可能是誘餌無人機。由于誘餌機數量遠多于戰斗機、反射雷達電磁波能力更強,并且位置上更靠前,敵機雷達大概率會截獲誘餌機。
第二階段,利用敵方雷達制導空空導彈對誘餌進行攻擊的時間間隙,我方戰斗機繼續向敵方飛機突防,到達我方雷達探測距離內,我方雷達即開機搜索、截獲目標,實施空空導彈攻擊。
第三階段,當誘餌機突防成功,到達敵機一定距離時,以自爆的形式向敵機造成損傷。
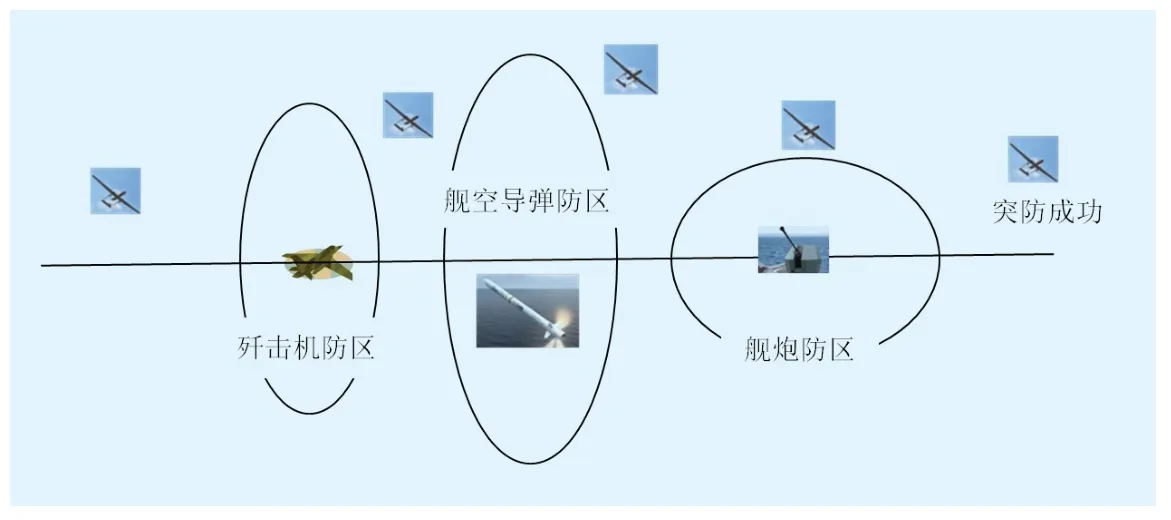
無人機突防過程
作戰場景三:無人機海戰場效能評佑艦艇編隊作戰中很重要的一項任務是海戰場效能評估。無人機可以攜帶多種成像傳感器,如光學、紅外、SAR等成像設備,可以獲取各種類型的圖像數據進行海戰場偵察。無人機將海戰場信息傳送給指揮中心,指揮中心將打擊后的圖像與打擊前模型庫做匹配,根據這些信息對打擊效果進行評估。
無人機要到敵方海域活動,面臨著由預警雷達、航空火炮、航空導彈和殲敵機等構成的現代化防空系統的威脅。無人機突防能力指標常常定義為:敵殲擊機防區突破概率、敵艦空導彈防區突破概率、敵艦炮防區突破概率三者的乘積。需要綜合考慮無人機性能、油耗、到達時間、飛行區域等條件,根據敵防空布置情況,為艦載無人機規劃出從起始點到目標點的一條或多條最優航線,保證艦載無人機突破敵防空系統,完成任務并安全返回。無人機突破敵方防空系統常常采用:超低空飛行、中高空突防、無線電靜默、隱性技術、欺騙戰術等。遵循三原則:采取隱身手段不被發現;盡量不進入敵防空區域;采取規避動作免受損傷。
作戰場景四:無人機遠海防衛信息保障第一,利用臨近空間無人機進行遠海作戰的通信中繼。對于遠海艦艇編隊來說,最好的通信中繼就是衛星,但很多遠海地域是中繼衛星覆蓋邊緣或者覆蓋范圍之外。短時間內,大量發射中繼衛星覆蓋大量遠海范圍并不現實,而臨近空間無人機可以很好地解決這一問題。臨近空間即離地球表面約20~100千米的空域。對大多數飛機來說這個區域太高,對衛星來說又太低。而臨近空間無人機運行于臨近空間,相比于使用衛星成本很低,生存能力強。
其中,太陽能無人機的滯空時間長,成為各國研究的重點。目前各國臨近空間太陽能無人機大都還處于驗證階段,主要問題是載荷較小,面對臨近空間復雜的電磁環境是無人機可靠性不高等問題。
一旦太陽能臨近空間無人飛行器技術成熟,就可以解決遠海艦艇編隊的衛星通信覆蓋不到的問題。遠海艦艇編隊與臨近空間通信中繼機建立鏈路,再利用中繼機的高度優勢,與通信衛星建立連接,可以實現遠海艦艇編隊在覆蓋范圍外與通信衛星建立星地鏈路,為衛星通信補盲。
通常臨近空間無人機可以滯空若干天,也就是說它可以根據任務態勢,提前布置在任務區域,并且持續執行任務。但是由于臨近空間大氣稀薄,空氣升力較小,氧氣含量較少,這種臨近空間無人機通常都要有較大的翼展以保證足夠的升力,這樣就決定了它無法在海基平臺發射,包括航母平臺,但由于臨近空間飛行器擁有超長時間的續航時間,因此可提前部署到任務區域,而且由于飛行距離接近太空,受他國領空限制較少。可以覆蓋范圍達上百海里,可以為其遠海艦艇編隊提供通信中繼服務。
第二,無人預警機用于遠海防衛信息保障。與載人偵察預警機相比,無人預警機可以更前出,執行更危險的任務,有人預警機一般要在己方制空區域內活動。比如艦載預警機一般在距離航母400千米以內巡邏警戒,還要4 架戰機貼身護航,4架在預警機前方100千米左右護航。因此,航母能掌握700~800千米內的空情。有了無人預警機后,就可以再前出300千米,增加200多千米的預警距離。航母就能發現離自己1000千米的遠程轟炸機,并起飛艦載殲擊機前去攔截。

衛星覆蓋范圍外的通信中繼無人機工作示意
對于驅護艦為主的遠海艦艇編隊而言,無人預警機能夠擺脫地球曲率對艦載雷達的限制,大大提高偵察預警的范圍,還能為導彈提供中繼制導服務,提高導彈命中率。其適合于各種遠海艦艇編隊,即使是中小型編隊也能大大提高預警能力。無人預警機相當于一個移動雷達,不具備時時指揮功能,需要下傳數據,艦艇分析后再進行指揮,也可以說這種預警機相當于艦載雷達的空中延伸,解決艦艇編隊對海上中低空目標的探測能力不足的問題。目前,預警無人機主要朝更大載荷、更短短距起降、更長滯空時間方向發展。
結語
要使無人機在未來海戰場充分發揮作用,還需要進一步發展相關的關鍵技術,如無人機編隊飛行控制技術、高速遠程無人機動力系統設計、傳感器技術、無人機的聯網與通信等。
猜你喜歡
小學生學習指導(小軍迷聯盟)(2023年5期)2023-05-29 08:13:18
環球時報(2022-12-30)2022-12-30 15:15:00
軍事文摘(2022年13期)2022-08-27 01:26:26
鳳凰動漫(軍事大王)(2022年3期)2022-06-17 01:46:36
艦船科學技術(2022年5期)2022-04-19 10:58:46
軍事文摘(2021年21期)2021-11-14 10:14:56
軍事文摘(2017年24期)2018-01-19 03:36:16
兵器知識(2017年10期)2017-10-19 19:31:38
軍事體育學報(2014年3期)2014-02-27 16:00:16
船海工程(2013年6期)2013-03-11 18:57:37
