剛性接觸網(wǎng)跨距對弓網(wǎng)動態(tài)性能的影響分析
2021-07-15 06:45:40皋金龍
電氣化鐵道 2021年3期
關(guān)鍵詞:模型
皋金龍
0 引言
剛性接觸網(wǎng)在隧道內(nèi)相對柔性接觸網(wǎng)具有一定優(yōu)勢,其接觸線無張力,不用設(shè)置下錨裝置,不會發(fā)生斷線事故,零部件少,載流量大,安全可靠,維修工作量小,被廣泛應(yīng)用于地鐵隧道內(nèi)[1]。隨著國內(nèi)軌道交通線路運行速度的不斷提高,對弓網(wǎng)系統(tǒng)的動態(tài)性能要求越來越高。跨距是剛性接觸網(wǎng)的一項關(guān)鍵參數(shù),弓網(wǎng)之間的良好受流質(zhì)量需要選取合理的跨距,鑒于此,有必要對不同速度等級下剛性接觸網(wǎng)跨距的選取進行研究。
目前,針對不同速度等級下剛性接觸網(wǎng)跨距選取的研究較少,文獻[2~4]建立弓網(wǎng)耦合模型,通過靜力分析與弓網(wǎng)動態(tài)仿真分析僅研究了在160 km/h及以下速度等級下與某種型號受電弓相匹配的跨距方案,尚未對在不同速度等級下與不同型號受電弓相適應(yīng)的剛性接觸網(wǎng)跨距進行研究。本文建立剛性接觸網(wǎng)與受電弓模型,采用弓網(wǎng)動態(tài)仿真技術(shù),分析不同型號受電弓以不同速度通過不同跨距剛性接觸網(wǎng)的弓網(wǎng)動態(tài)性能參數(shù),得出不同速度等級下與不同型號受電弓相適應(yīng)的剛性接觸網(wǎng)跨距,為受電弓與剛性接觸網(wǎng)系統(tǒng)設(shè)計提供研究基礎(chǔ)。
1 弓網(wǎng)仿真模型
剛性接觸網(wǎng)由匯流排、接觸線、懸掛與定位結(jié)構(gòu)等組成。匯流排通過一定的夾持力將接觸線固定,兩者形成一個整體,懸掛與定位結(jié)構(gòu)主要包含門式結(jié)構(gòu)與懸臂式結(jié)構(gòu)。利用有限元法建立剛性接觸網(wǎng)仿真模型時,可將匯流排與接觸線考慮為一個整體,等效為歐拉梁單元,將門式懸掛結(jié)構(gòu)與懸臂式懸掛結(jié)構(gòu)等效為一個帶質(zhì)點的彈簧單元。因剛性接觸網(wǎng)的匯流排截面慣性矩較大,通常剛性接觸網(wǎng)成“之”字形布置,又因拉出值較小,一般最大為250 mm,相對于剛性接觸網(wǎng)的錨段長度250 m,拉出值變化率很小,故建模時忽略拉出值的變化。
在建立剛性接觸網(wǎng)錨段關(guān)節(jié)模型時,為使受電弓從一個錨段平滑過渡到另一個錨段,剛性接觸網(wǎng)的錨段關(guān)節(jié)利用兩錨段剛性接觸網(wǎng)幾何上重疊實現(xiàn),重疊區(qū)域在空間上存在等高點,并將錨段末端的歐拉梁單元抬高70 mm[5],剛性接觸網(wǎng)等效模型如圖1所示。

圖1 剛性接觸網(wǎng)等效模型
本文分析的跨距值分別為6、8與10 m,根據(jù)工程經(jīng)驗及文獻[3],建立3個錨段模型,其中跨距6 m的錨段內(nèi)跨距分布為1.8 m + 2 m + 4 m + 6 m×39 + 4 m + 2 m + 1.8 m,跨距8 m的錨段內(nèi)跨距分布為1.8 m + 2 m + 6.4 m + 8 m×27 + 7 m + 6 m + 2 m + 1.8 m,跨距10 m的錨段內(nèi)跨距分布為1.8 m + 2 m + 6 m + 10 m×23 + 6 m + 2 m + 1.8 m。
受電弓由弓頭、上框架、下臂桿、傳動系統(tǒng)與底架等組成,結(jié)構(gòu)復雜,在弓網(wǎng)動態(tài)仿真中需要將其進行簡化。目前,多數(shù)學者進行弓網(wǎng)動態(tài)仿真分析時通常將受電弓結(jié)構(gòu)等效為質(zhì)量塊模型、多剛體模型、剛?cè)狁詈夏P汀⑷狍w模型[6],因本文不對受電弓結(jié)構(gòu)特點進行分析,且根據(jù)文獻[7]的研究,三質(zhì)量塊模型的仿真結(jié)果比二質(zhì)量塊模型更準確,故本文選取受電弓三質(zhì)量塊模型進行弓網(wǎng)動態(tài)仿真。本文基于交流供電制式的市域快速軌道交通線路,選取能夠滿足最高運行速度200 km/h的3種型號(DSA200、DSA250與DSA380)受電弓進行分析研究。
2 弓網(wǎng)動態(tài)性能分析
選取接觸力標準偏差、接觸力最大值與接觸力最小值作為評價指標,分析不同型號受電弓以不同速度通過不同跨距時的弓網(wǎng)動態(tài)性能。
2.1 DSA200型受電弓
DSA200型受電弓以不同速度分別通過6、8、10 m 3種跨距的剛性接觸網(wǎng),得到受電弓在不同運行速度下的接觸力標準偏差與接觸力最值,分別如圖2、圖3所示。

圖2 弓網(wǎng)接觸力標準偏差
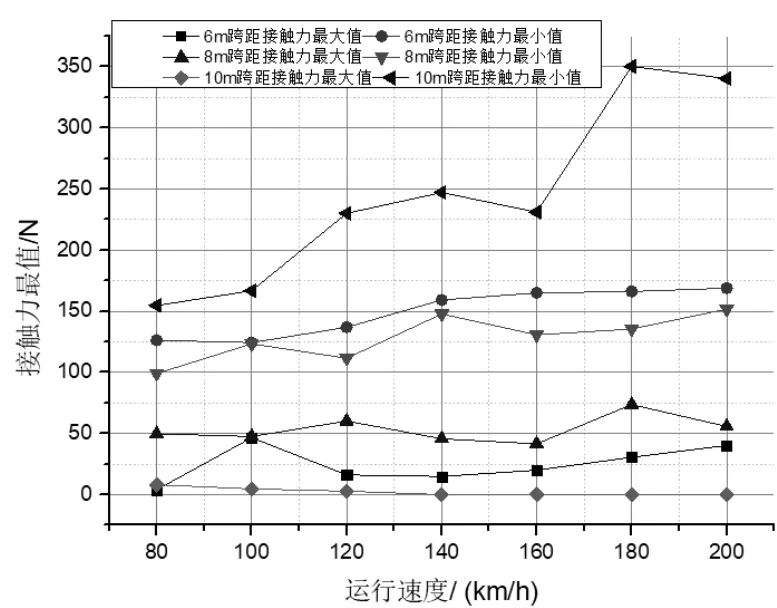
圖3 弓網(wǎng)接觸力最值
選擇運行速度80、120、160、200 km/h 4種工況,統(tǒng)計3種跨距的接觸力特征值,如表1所示。
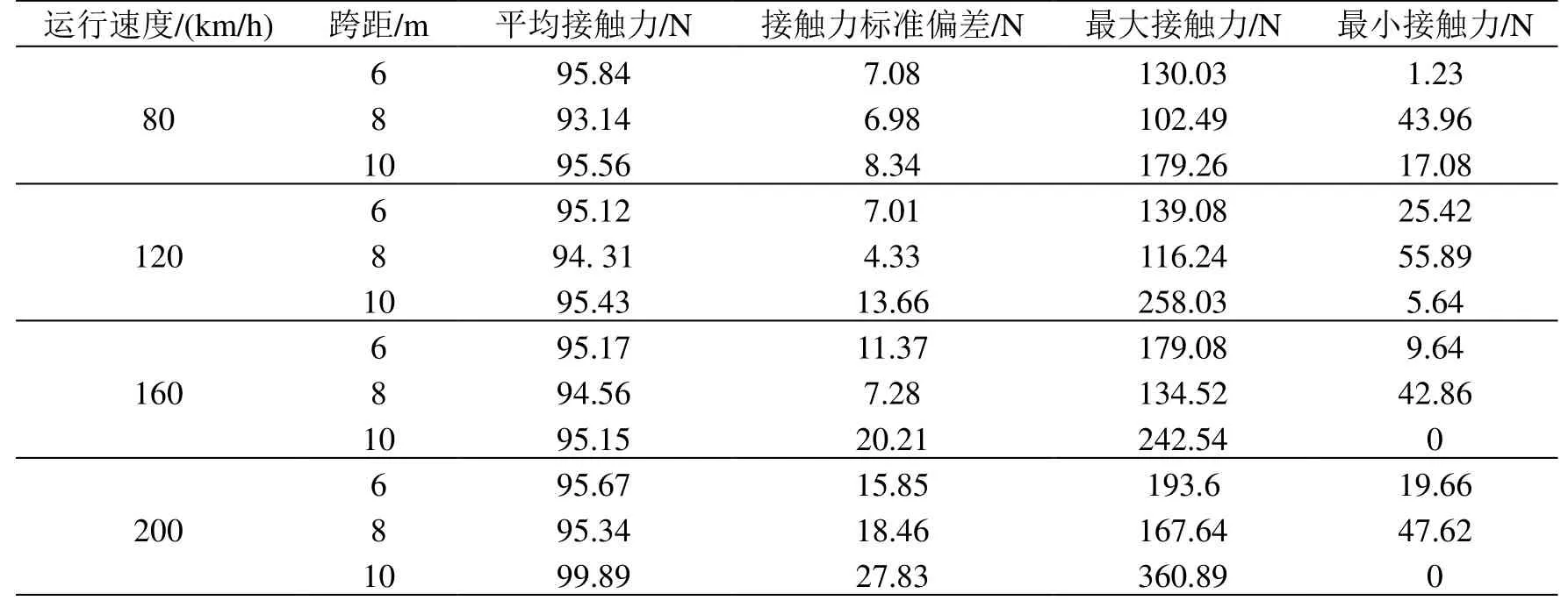
表1 DSA200型受電弓通過不同跨距接觸網(wǎng)的弓網(wǎng)接觸力統(tǒng)計
從表1可以看出,以160 km/h運行速度通過10 m跨距時,最小接觸力已經(jīng)為0,表明DSA200型受電弓不適合以160 km/h速度通過跨距為10 m的剛性接觸網(wǎng)。接觸力標準偏差越小,表明接觸力的分布越集中于平均接觸力,弓網(wǎng)接觸質(zhì)量越好。在速度為80~160 km/h時,8 m跨距的弓網(wǎng)接觸力標準偏差最小,表明DSA200型受電弓與8 m跨距剛性接觸網(wǎng)的適應(yīng)性更好。在速度達200 km/h時,6 m跨距的弓網(wǎng)接觸力標準偏差最小,表明DSA 200型受電弓與跨距為6m的剛性接觸網(wǎng)匹配性較好。
2.2 DSA250型受電弓
DSA250型受電弓以不同速度分別通過6、8、10 m 3種跨距的剛性接觸網(wǎng),得到受電弓在不同運行速度下的接觸力標準偏差與接觸力最值,如圖4、圖5所示,弓網(wǎng)接觸力統(tǒng)計如表2所示。
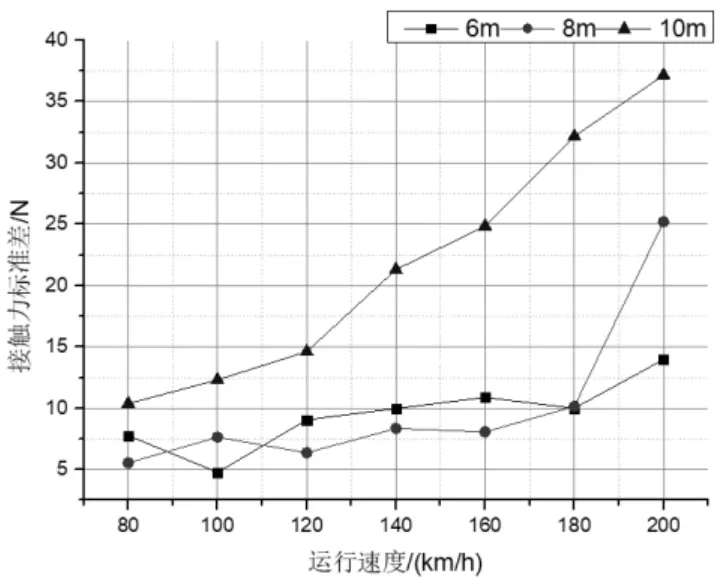
圖4 弓網(wǎng)接觸力標準偏差
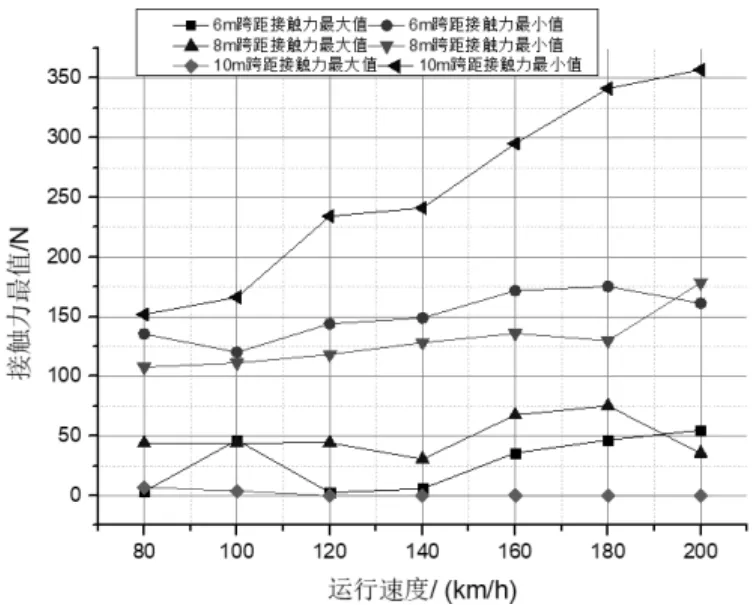
圖5 弓網(wǎng)接觸力最值
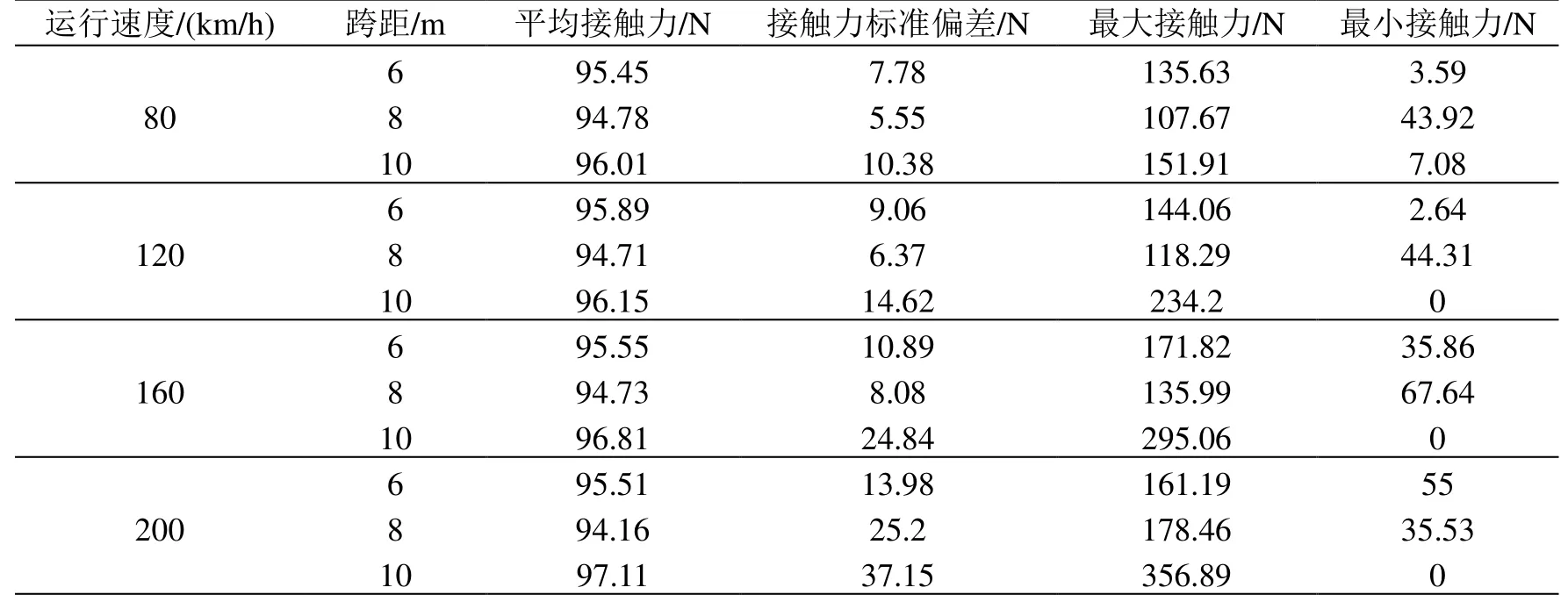
表2 DSA250型受電弓通過不同跨距的弓網(wǎng)接觸力統(tǒng)計
從表2可看出,在速度達到120 km/h時,跨距為10 m的剛性接觸網(wǎng)的最小接觸力已經(jīng)為0,表明DSA250型受電弓不適合以120 km/h速度通過跨距為10 m的剛性接觸網(wǎng)。DSA250型受電弓在80、120、160 km/h速度等級下,8 m跨距的弓網(wǎng)接觸力標準偏差最小,表明DSA250型受電弓與8 m跨距的剛性接觸網(wǎng)更匹配。在速度達200 km/h時,6 m跨距的弓網(wǎng)接觸力標準偏差最小,表明DSA250型受電弓與6 m跨距的剛性接觸網(wǎng)更匹配。
2.3 DSA380型受電弓
DSA380型受電弓以不同速度分別通過6、8、10 m 3種跨距的剛性接觸網(wǎng),得到受電弓在不同運行速度下的接觸力標準偏差與接觸力最值,如圖6、圖7所示,弓網(wǎng)接觸力統(tǒng)計如表3所示。
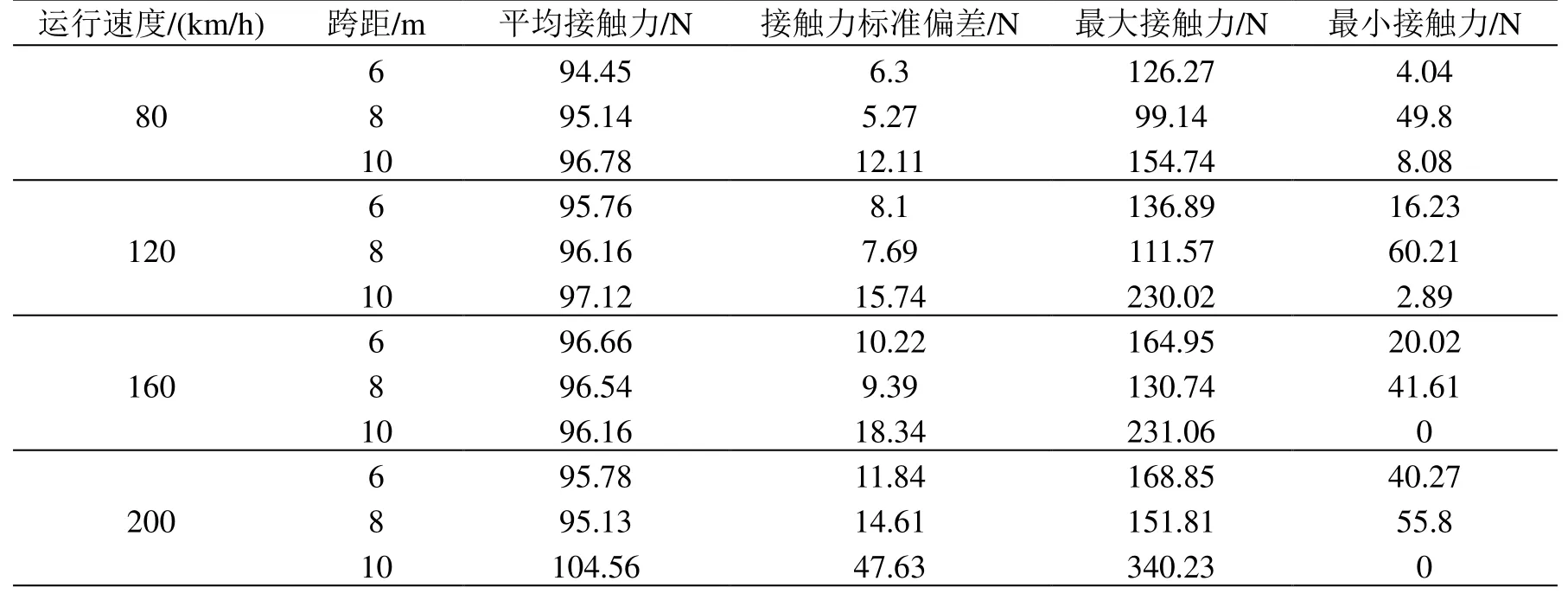
表3 DSA380型受電弓通過不同跨距的弓網(wǎng)接觸力統(tǒng)計
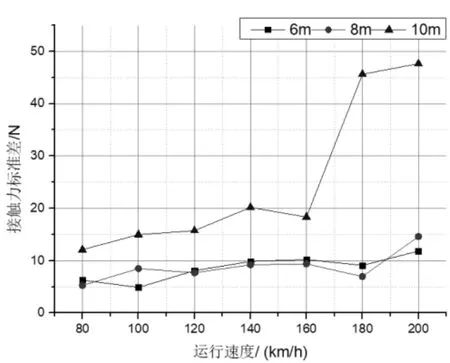
圖6 弓網(wǎng)接觸力標準偏差
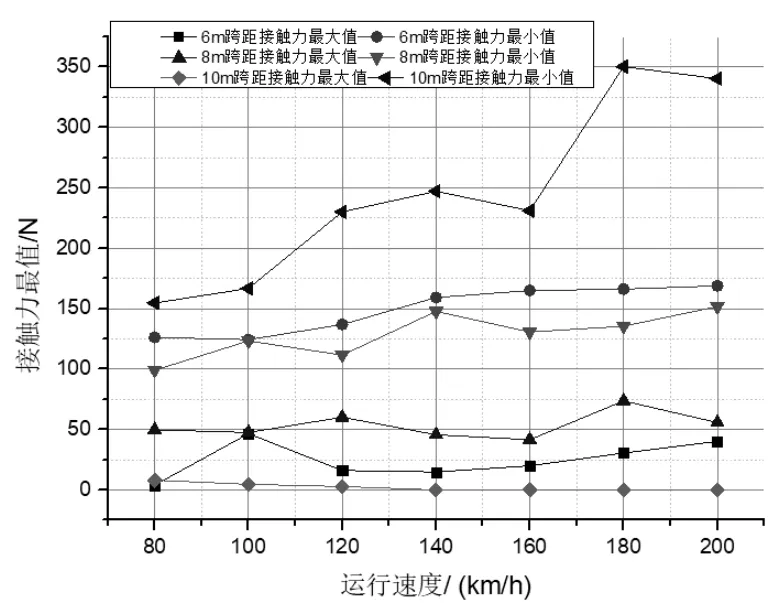
圖7 弓網(wǎng)接觸力最值
由圖6可以看出,在速度為160 km/h及以上,10 m跨距的弓網(wǎng)接觸力標準偏差呈直線增加,表明在高速運行區(qū)段,10 m跨距的剛性接觸網(wǎng)弓網(wǎng)匹配關(guān)系急劇惡化。由表3可以看出,DSA380型受電弓在80、120、160 km/h運行速度下,8 m跨距的弓網(wǎng)接觸力標準偏差最小,表明DSA380型受電弓與跨距為8 m的剛性接觸網(wǎng)更匹配。在速度為200 km/h時,6 m跨距的弓網(wǎng)接觸力標準偏差最小,表明此時DSA380型受電弓與跨距為6 m的剛性接觸網(wǎng)更匹配。
3 結(jié)語
本文通過建立3個錨段的剛性接觸網(wǎng)仿真模型及受電弓三質(zhì)量塊仿真模型,分析了DSA200、DSA250及DSA380型受電弓以不同速度通過6、8及10 m 3種跨距剛性接觸網(wǎng)時弓網(wǎng)動態(tài)性能參數(shù),結(jié)果表明不同型號受電弓在不同速度等級下應(yīng)采取不同的跨距以得到最佳的弓網(wǎng)動態(tài)性能。
通過分析比較弓網(wǎng)接觸力標準偏差得出:在80~160 km/h速度等級下,DSA200、DSA250及DSA380型受電弓與跨距為8 m的剛性接觸網(wǎng)更匹配;當速度達到200 km/h時,DSA200、DSA250及DSA380型受電弓與跨距為6m的剛性接觸網(wǎng)更匹配。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19