油電混合多旋翼無人機技術在鐵路勘測中的應用
2021-07-15 06:48:34邢玥,郭磊,劉暢
電氣化鐵道 2021年3期
邢 玥,郭 磊,劉 暢
0 引言
目前,無人機行業中多數航測設備廠家研發的測繪無人機為固定機翼結構,該結構無人機體積較大,日常作業需要3~5人的團隊,便攜性較差,且起降受場地限制較大。部分廠家研發多旋翼結構測繪無人機[1],但由于續航時間較短,不適宜鐵路行業長距離、長航時應用。目前無人機測繪[2,3]專業程度較高,操作復雜,需要專業團隊操作,不能滿足用戶自主使用的要求。
本文對固定機翼結構測繪無人機和電動多旋翼測繪無人機的優點進行技術融合,以實現現場高質高效的航測數據收集,使數據達到共享互通,設計人員無需耗費大量人工及時間成本進行現場踏勘,在辦公室就可以獲得現場測量數據,并對收集到的現場數據進行匯總、瀏覽,滿足鐵路測繪高精度的需求,大大提高了數據的精確度、時效性,確保鐵路設計的高效率和準確度。
1 方案設計
依據現有航測無人機設備結構特征進行方案設計,主要研究內容及攻關目標如下:
(1)實現高效率、長航時、高安全性的目標。無人機的供電部分采用航空汽油發動機搭載發電機經變壓整流為全機提供電力,利用鋰電池作為后備電源。從目前動力型鋰電池行業整體技術水平來看,單位重量下能量密度尚未超越傳統燃料,因此采用內燃機提供電力在相同載重及續航下效率更高。同時動力型鋰電池雖然重量較輕,但壽命相對較短,不穩定因素較多,因此利用內燃機發電驅動電機巡航,鋰電池僅作為惡劣天氣下內燃機功率不足以巡航時的后備電源及故障情況下的備用動力,較單一能源方式更加安全可靠。
(2)系統需具備易操作的特點。拋棄傳統無人機需要人工實時操作的遙控器,基于模塊化設計將所有控制設備整合于控制站,利用控制站及自駕儀,設置航路坐標、高程、重疊率等,實現無人機完全自主起降、自主飛行,無需人工實時操作。
(3)滿足鐵路測繪高精度的需求。為滿足測繪高精度的需求,應具備高像素、低延時、結構簡潔、抗震性強、通信可靠、控制靈活、接口規范等特點。
本設計采用數碼相機CCD成像技術[4,5]進行數據記錄。系統的硬件部分由探查系統、無人機遙感平臺、數據傳輸裝置、地面控制站單元、數據管理中心組成,如圖1所示。
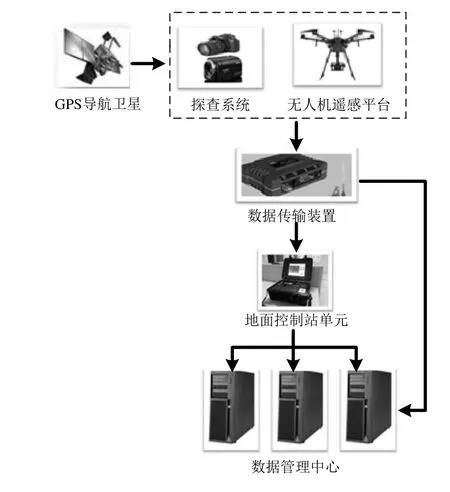
圖1 油電混合多旋翼勘測無人機系統整體架構
1.1 硬件設計
(1)機身本體。機身采用四旋翼結構,整體結構均由碳纖維材料構制而成,機架、支臂、起落架等皆為輕強結構設計。中心采用3K碳纖維管為主體,上部為碳纖維制燃油箱固定板,下部為碳纖維制電池固定板。電機架采用7075鋁合金CNC加工而成,機臂采用傘式折疊結構,折疊關節采用卡隼固定,展開方便快捷。機身本體如圖2所示。

圖2 機身本體
(2)數傳系統。由于測繪任務多、面積大、距離遠,為此選擇專業的數傳系統,功率1 W,頻率800 MHz,以完成雙向數據傳輸任務。雙向數據傳輸的測控鏈路能可靠實現飛行數據下傳和獲取飛行參數。
(3)飛控系統。飛控系統由主控芯片、穩壓芯片、姿態傳感器、磁力計、氣壓計、存儲器、USB串口、直插排針等組成,系統示意如圖3所示。飛控系統可將飛行器的姿態、位置、高度、速度、航向以及動力電壓等數據參數通過測控鏈路實時下傳至地面工作站,提高信息獲取效率。
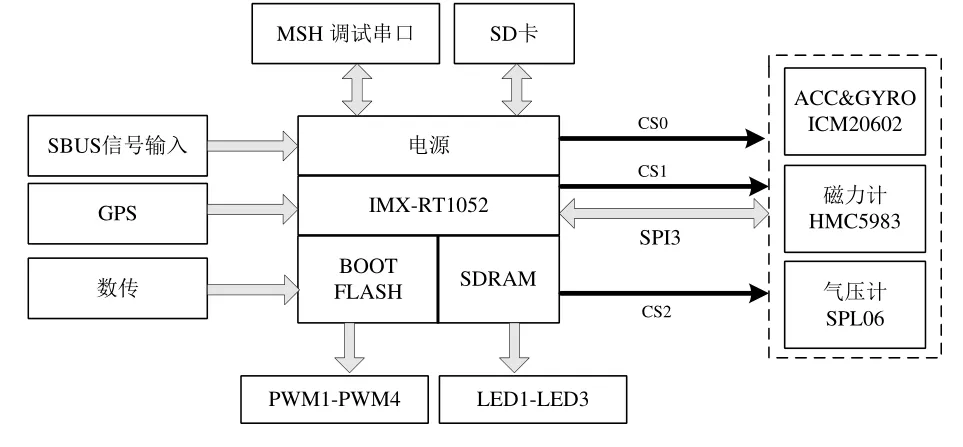
圖3 飛控系統硬件示意圖
(4)動力部分。動力部分選擇日本小松32cc航空燃油發動機,上部通過減震橡膠與機身本體相連,發動機曲軸輸出端固定連接2 000 W變頻發電機線圈輸出,并通過穩壓整流器轉換為44.4 V直流電,為電動機提供動力,增加航時的同時可提高測繪效率。發電機部分采用高集成、易檢修模塊化設計,安裝、調試、檢修實現一步到位,設計如圖4所示。
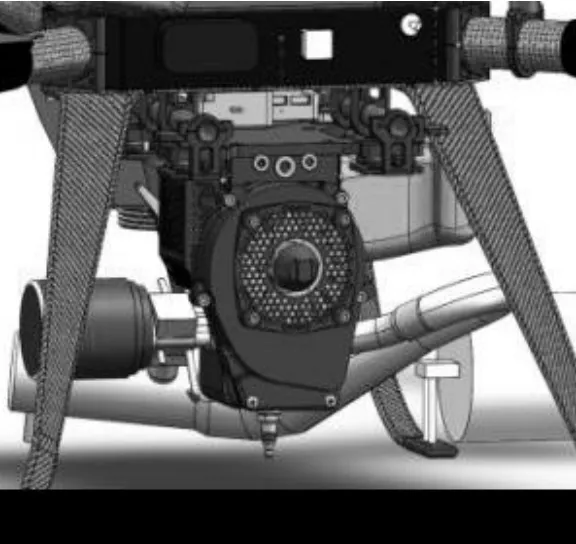
圖4 發電機設計
整套設備均采用模塊化設計,具有較強的可擴展性,可方便地實現各設備部件的更換,滿足電力巡檢等業務的需求,適應業務量、業務流程的擴展。設備具備多種應急自動處理機制,包括低電量、發動機熄火、下降速度過快、數據鏈中斷、GPS信號丟失、姿態超限與角速率超限等異常保護,進一步提高安全性。在機載電池電壓不足時,會發出報警(在遙控器和地面站上均會發出報警),提高了安全性。
1.2 無人機控制系統設計
無人機控制系統由于其組成復雜,且戶外作業時的惡劣環境大大影響了控制系統的可靠性。為實時、可靠、有效地控制無人機,提出模塊化整合無人機控制系統,如圖5所示。
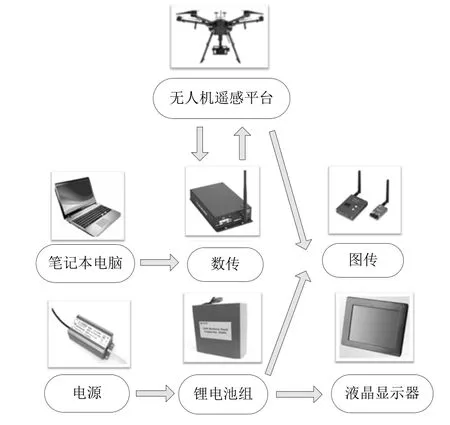
圖5 無人機地面控制站單元系統結構
外部以防水、防塵、防摔的三防安全箱保護,預留了RTK、圖傳饋線以及USB接口,并在內部設計了雙重散熱風道,確保不影響整套控制系統的正常穩定運行。同時為了更直觀地觀察到實時影像,該設計在控制系統中加入了1.2 GHz實時影像圖傳以及圖傳攝像頭,方便日常巡檢等任務。
1.3 數據采集相機自穩云臺單元設計
由于采用內燃機為動力,內燃機產生的震動成為影響采集精度的主要因素。為此,設計了可滿足精度要求的云臺組。
首先設計了云臺固定架,固定架采用航空級7075鋁合金材料,下部安裝板采用碳纖維復合材料,表面采用陽極氧化處理,并進行輕量化處理,以保證整體剛性與強度。上部固定采用碳纖維管材吊裝、抱箍結構固定的方式,穩定可靠,同時該框架式結構也可防止運輸移動過程中因意外發生磕碰相機的情況。云臺固定架與相機如圖6所示。

圖6 云臺固定架與相機
自穩云臺本體采用三軸結構,使用碳纖維復合材料及輕質高強度7075鋁合金CNC加工,抗震性強;自穩伺服機選用高速無核伺服機,角速度最快可達到7.476 rad/s,控制靈活,俯仰動作、橫滾動作、航向動作均可實現及時糾偏,并根據相機規格設計了固定夾具。動作部分選用了高角速度伺服機,以齒輪傳遞結構連接至云臺。云臺下部與云臺固定板之間裝有4只濾波減震橡膠,進一步有效過濾、降低震動,如圖7所示。

圖7 自穩云臺單元
2 試驗驗證
設備研制完成后,組織了設備驗收及測試,并對距離、面積等測量數據的精度進行了驗證。通過實時遙感影像傳輸,獲取相應坐標高程參數及高精度數據,還可進行數據計算,同時提高了數據處理的效率。
2.1 試驗驗證1
首先在鐵路線路附近拍攝約3 km2的實時地形信息,并獲取相應坐標高程參數。經過實地測量,該路段路燈桿間距為50 m,利用無人機航測獲取的數據為49.999 m,相對誤差為0.1%,滿足高精度測距的精度要求。
2.2 試驗驗證2
在集通電氣化改造工程項目好魯庫220 kV牽引變電所選址中,利用研制的無人機對現場周圍環境進行勘測,設定6處路徑,將獲得的數據分別與人工現場測距進行對比,對比數據如表1所示。結果表明,無人機測試距離誤差小于5%,滿足工程選址精度要求。

表1 測量數據誤差對比數據
3 經濟效益分析
研制的油電混合多旋翼無人機于2019年8月在京廣鐵路電氣化工程改造項目中進行了現場實地勘測與測量。經統計,采用該方式較傳統方式累計節約成本12萬余元,經濟效益較好。
4 結語
本文研究在傳統多旋翼無人機設備的基礎上,重新構建新型油電混合多旋翼無人機勘測設備設計方案,采用系統集成、模塊化設計思路,最終實現了全部航測數據的共享互通,極大提高了鐵路工程勘測的作業效率,并在工程項目中得到了實際應用,獲得了良好的經濟效益。
猜你喜歡
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
上海建材(2019年4期)2019-05-21 03:13:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
纖維復合材料(2018年4期)2018-04-28 08:45:28
纖維復合材料(2018年3期)2018-04-25 07:22:58
中國公共安全(2017年7期)2017-10-13 08:18:11
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年9期)2017-04-17 03:01:00