潛標抗漂移布放技術
2021-07-16 03:11:02米智楠楊群慧吳正偉
船舶與海洋工程 2021年3期
唐 松,米智楠,楊群慧,吳正偉,金 璐
(1. 同濟大學 a. 機械與能源工程學院,上海 201804; b. 海洋與地球科學學院,上海 200092;2. 國家海底科學觀測網大科學工程辦公室,上海 200092)
0 引 言
海底科學觀測系統是繼地面與海面觀測系統和空中遙測遙感系統之后建立的第三種地球科學觀測平臺,力求從海洋內部直接、細致地對海洋環境的各種參數進行觀測。潛標作為重要的水下觀測設備,在海洋科學研究中具有重要作用,能對水體剖面實現原位、長期、連續、實時、高分辨率和高精度觀測。GOBAT等采用有限差分法建立了低張力海纜與海床相互作用的數學模型,并編寫了一套錨系姿態計算軟件。SEBASTIAO等基于離散的等效項近似模擬連續撓性原理,對纜索進行動態建模,得到了可快速自動檢索電纜的動態模型的通用算法。采用合理的潛標定位布放技術能提高觀測數據的準確性,相關研究已引起越來越多研究人員的重視。潛標入水之后,重塊會在海流的影響下發生漂移,漂移的距離隨著海水深度的增加而增大,導致潛標在水中的實際位置與入水時的經緯度存在差異。為得到潛標在水中的實際位置,有必要對其進行定位,以降低回收風險。王澍初等針對國內精準定位布放作業存在的問題,提出一種基于無人遙控潛水器(Remote Operated Vehicles, ROV)成像聲吶圖像構建海底平面坐標系的深水設備精準定點布放方法。周紅偉等采用超短基線技術為水下調查設備提供精確的位置信息。孫萬卿針對淺海水聲定位技術的特點,基于有窮狀態自動機理論對淺海聲場進行建模,研究了有效聲速法的水聲定位算法。王琦等采用時差定位法和交會定位法解決雙矢量潛標交會定位問題。陳經剛提出一種量化潛標三維運動的方法,將潛標分段之后,采用測量儀器確定每段線纜的傾斜方向,由壓力和潛標布放參數確定其傾斜角度,以實現潛標各部分的空間定位。米智楠等對潛標浮力配置在布放潛標過程中的作用進行了探索。
國內外學者在潛標聲學定位等方面做了有益的嘗試,但在抗漂移定位方面開展的研究還比較少。本文在滿足總浮力配置要求的前提下,從提高安全性的角度對比研究4種方案的抗漂移能力,為潛標的定位布放提供參考。
1 潛標坐標系
潛標由主浮體、系留纜索、儀器包組件(包括聲通機和傳感器組等)、機電系留纜(EM纜)和海床基組件(包括聲學釋放器、傳感器組和沉底重塊等)組成。傳統的潛標全部通過系留纜索連接,只能實現非實時、低頻科學數據采集;本文所述模型中的EM纜可連接多個傳感器包,數據傳輸到海床基,海床基能通過纜系實時通信。采用集中質量法將潛標模型離散為一系列節點和無質量的彈簧,潛標的集中質量模型見圖1。
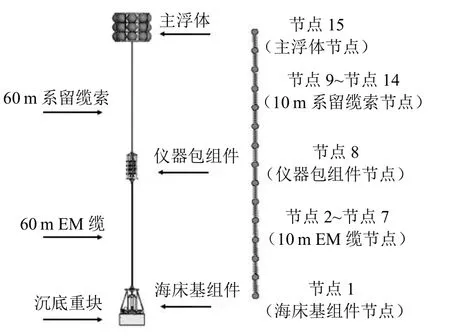
圖1 潛標的集中質量模型
采用標錨法布放潛標,即逆著水流方向,依次放入主浮體、系留纜索、儀器包組件、EM纜和海床基組件。采用二維笛卡爾坐標系Oxy
,將y
軸定義為水深方向,將x
軸定義為海平面方向,將坐標原點O
定義在主浮體的質心上,得到布放簡化示意見圖2。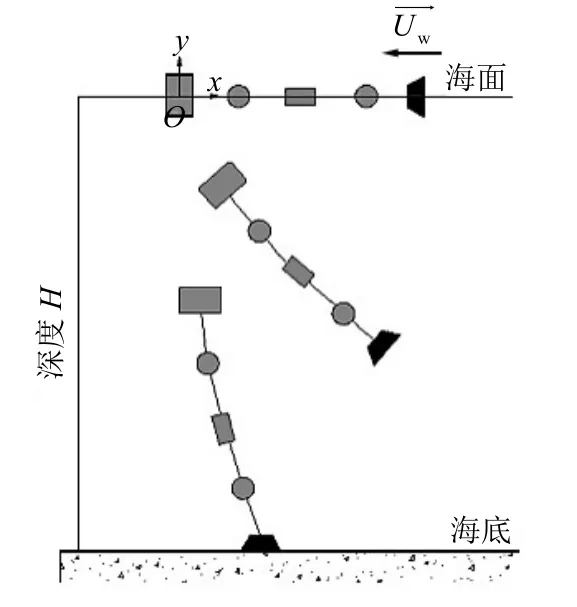
圖2 標錨法布放簡化示意

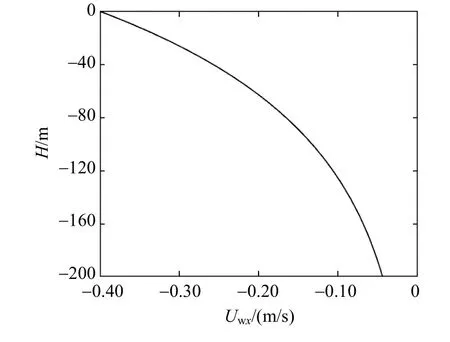
圖3 海流速度分布函數
2 潛標的數學模型
潛標節點在運動過程中受到重力iG
、浮力iB
、水動力阻力F
、慣性力F
和纜索的張力iT
的作用,受力示意見圖4,其中:v
為流體速度;v
為節點速度。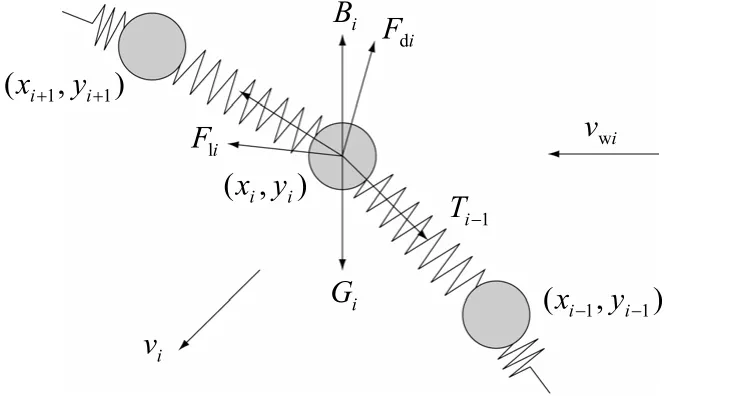
圖4 節點在布放過程中受力示意

m
為節點i
的質量;a
為節點i
的加速度;f
為海床對潛標的作用力,觸底時才會產生,故在受力圖中未表示。2.1 浮力和重力
在布放潛標過程中,將重力視為定值,浮力可通過積分求得

2.2 流體阻力
流體阻力的表達式為

C
為流體阻力系數;l
為節點之間的距離;d
為節點的直徑。2.3 慣性力
節點所受慣性力由附加質量效應產生的部分和排開流體體積2部分組成,表示為

2.4 張力
節點所受張力示意見圖5,1個單元的2個節點分別設為節點1和節點2。節點1和節點2受到的力分別為T
和T
,二者大小相等。取二維平面,可在x
方向和y
方向上投影。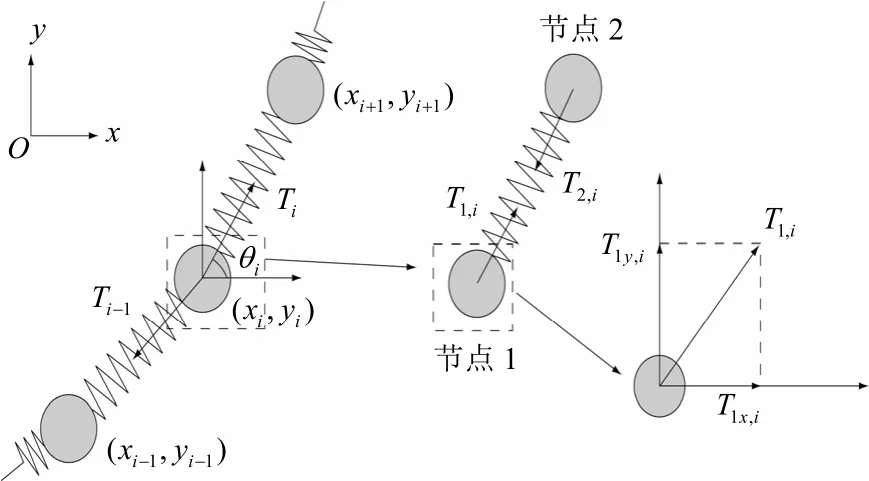
圖5 節點所受張力示意
根據胡克定律,張力的計算式為
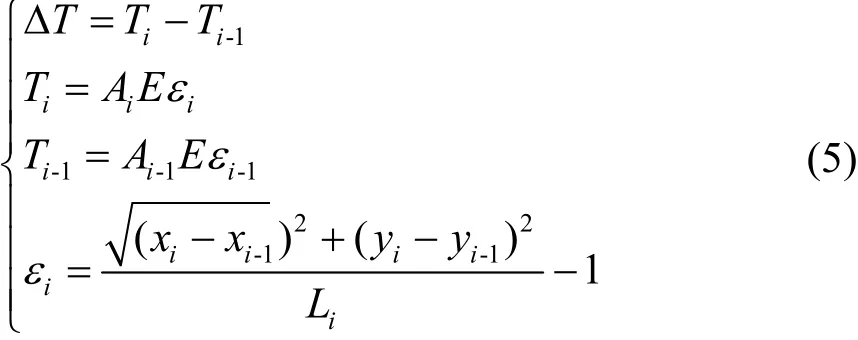
A
為節點i
的橫截面積;E
為彈性模量;L
為纜索自由長度;ε
為布放過程中纜索的伸長量與自由長度的比值。2.5 海底作用力
潛標觸底之后與海床的相互作用可參考GOBAT等和常洪波等的研究,將海底基當作線性阻尼系統求取。海底對潛標的支持力可表示為

潛標受到的海底摩擦力為

μ
為摩擦因數;k
'為海底剛度系數;c
'為線性阻尼系數。根據上述公式可得到二階非線性偏微分方程組,可采用Runge-Kutta法進行數值解算。通過MATLAB內置的 ODE45 函數對微分方程進行數值積分,可對潛標錨系進行水動力學分析。
3 數值模擬結果分析
3.1 仿真參數說明
EM纜和系留纜索的長度均為60m,每隔10m離散為1個節點,故可將潛標離散為15個節點。節點1為海床基節點,節點2~節點7為EM纜節點,節點8為儀器包節點,節點9~節點14為系留纜索節點,節點15為主浮體節點。上述公式用到的系數見表1和表2,附連質量系數C
和流體阻力系數C
參考BERTEAUX的描述,滑動摩擦因數參考孫雷等關于摩擦因數的描述,海底剛度系數k
'和線性阻尼系數c
'參考FEBER關于土壤等效剛度和阻尼的說明。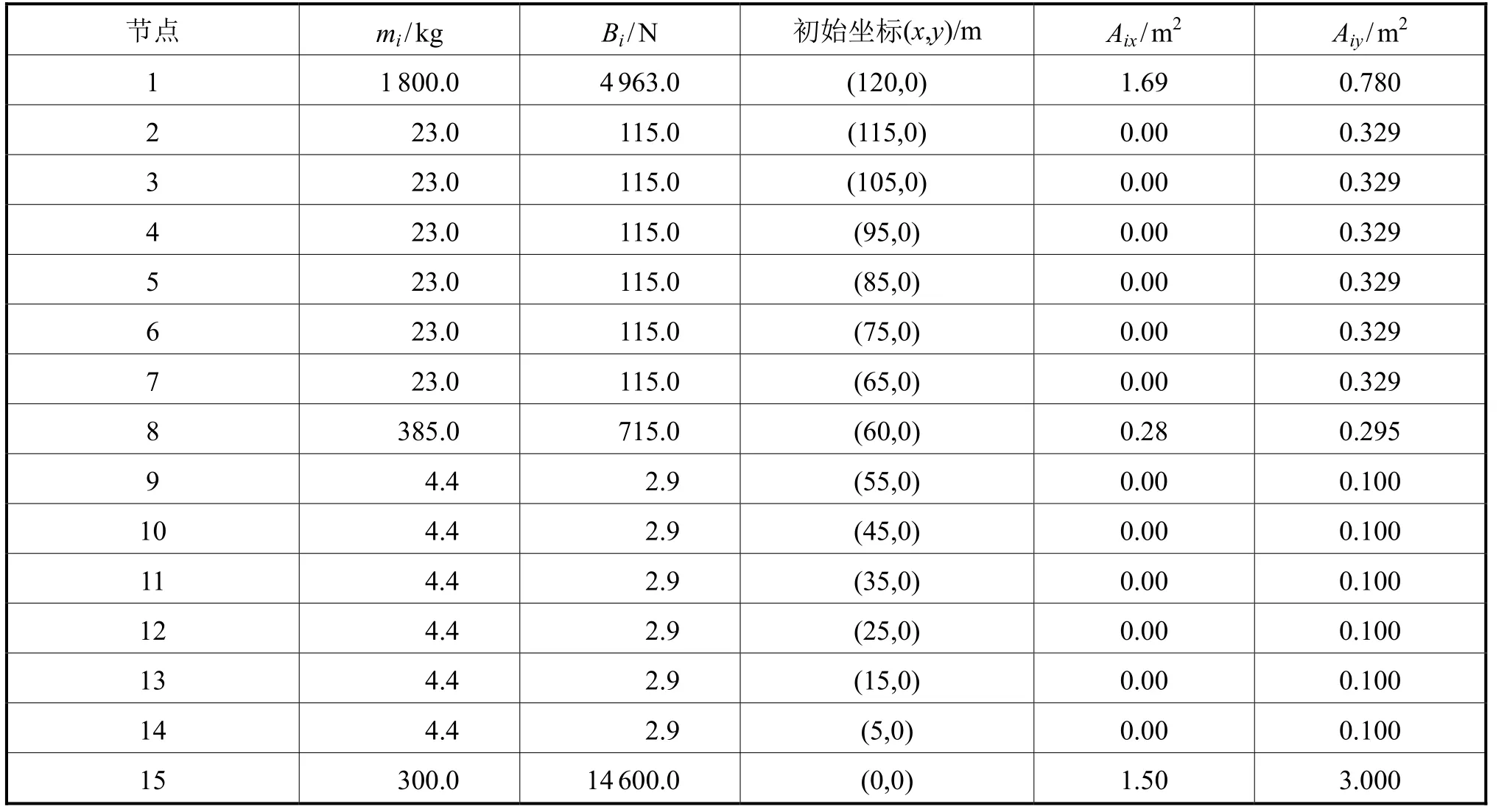
表1 各節點的物理參數

表2 潛標錨系水動力學參數
3.2 不同型式潛標水平方向運動對比
在滿足總浮力需求的前提下,從提高抗漂移性能的角度出發,兼顧回收的可靠性、張力和著底沖擊力的下降等,提出4種潛標方案(見圖6),其中:方案1是對比研究的基礎,不增加額外浮力;方案2是在海床基與儀器包之間增設浮力部件(小浮球組);方案3是在儀器包與主浮體之間增設浮力部件;方案4是在儀器包的上、下兩端均配置浮力部件。由于增設了浮力部件,方案2和方案3相應增加1個離散節點(即1個小浮球組節點),方案4增加2個離散節點(即2個小浮球組節點)。
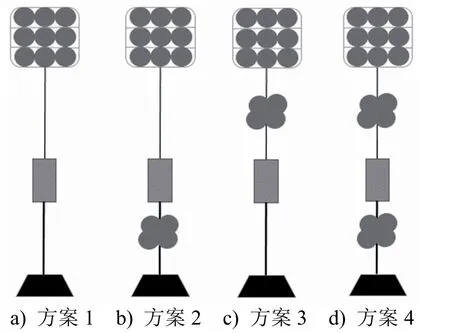
圖6 4種潛標方案
潛標入水之后,各部件會在海床基(包括沉底重塊)的作用下逐漸向中間靠攏,并在重力的作用下繃直、下降。選取海床基節點、儀器包節點和主浮體節點等3個關鍵部件,得到4種方案下各節點在水平方向上的漂移量見圖7。
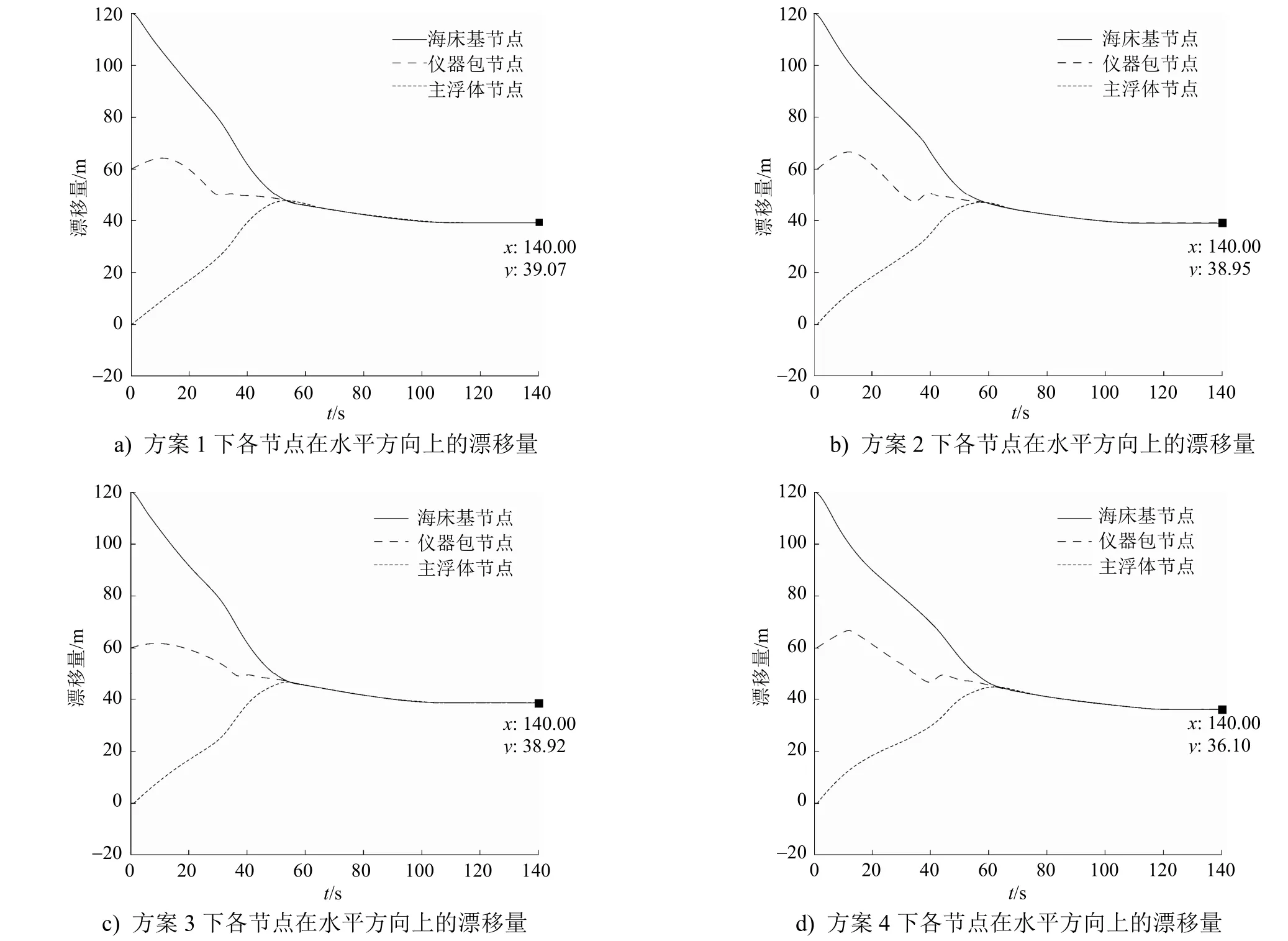
圖7 4種方案下各節點在水平方向上的漂移量
圖7中,數據游標顯示值為海床基節點的最終落地點在水平方向上的坐標(x
,y
)。由圖7可知:方案1~方案4的落地點縱坐標依次為39.07m、38.95m、38.92m和36.10m,而4種方案的初始縱坐標均為120m,因此方案1~方案4的海床基節點的漂移量分別為80.93m、81.05m、81.08m和83.90m;增加浮力部件(小浮球組)會使水平漂移量增大,對應方案2和方案3,二者的水平漂移量差別不大,說明浮力部件與安裝位置關系不大。考慮到增加浮力部件會引起張力發生變化,選取海床基節點、儀器包節點和主浮體節點等3個關鍵部件,得到4種潛標關鍵部位的張力響應對比見圖8。
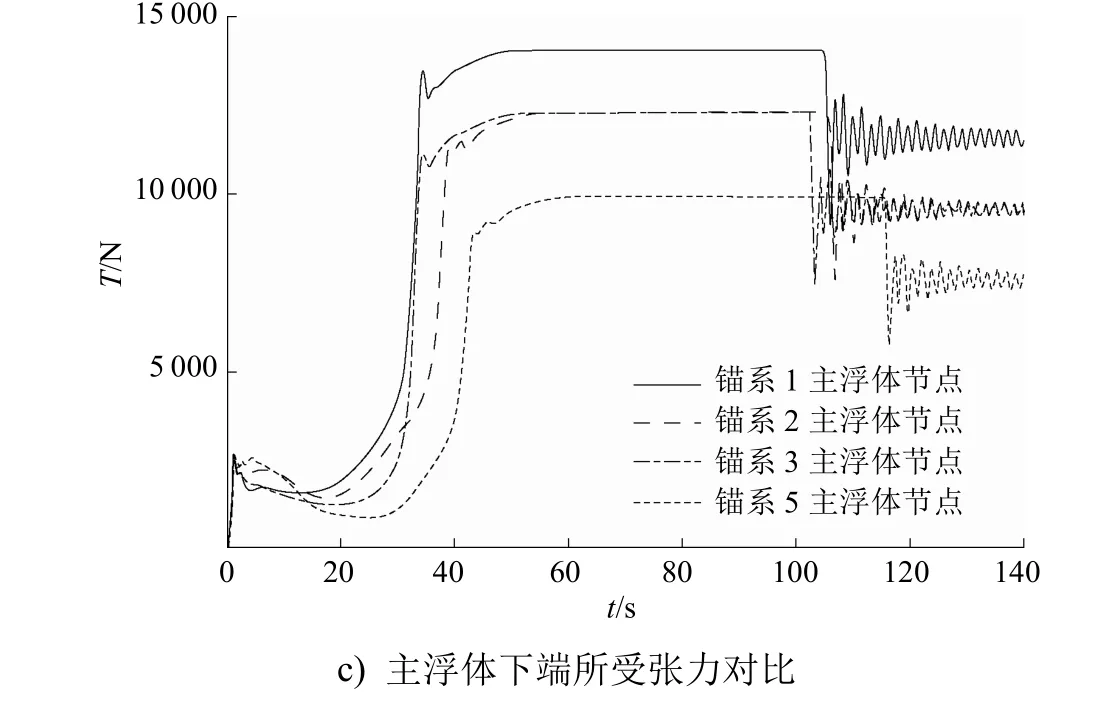
圖8 4種潛標關鍵部件的張力響應對比
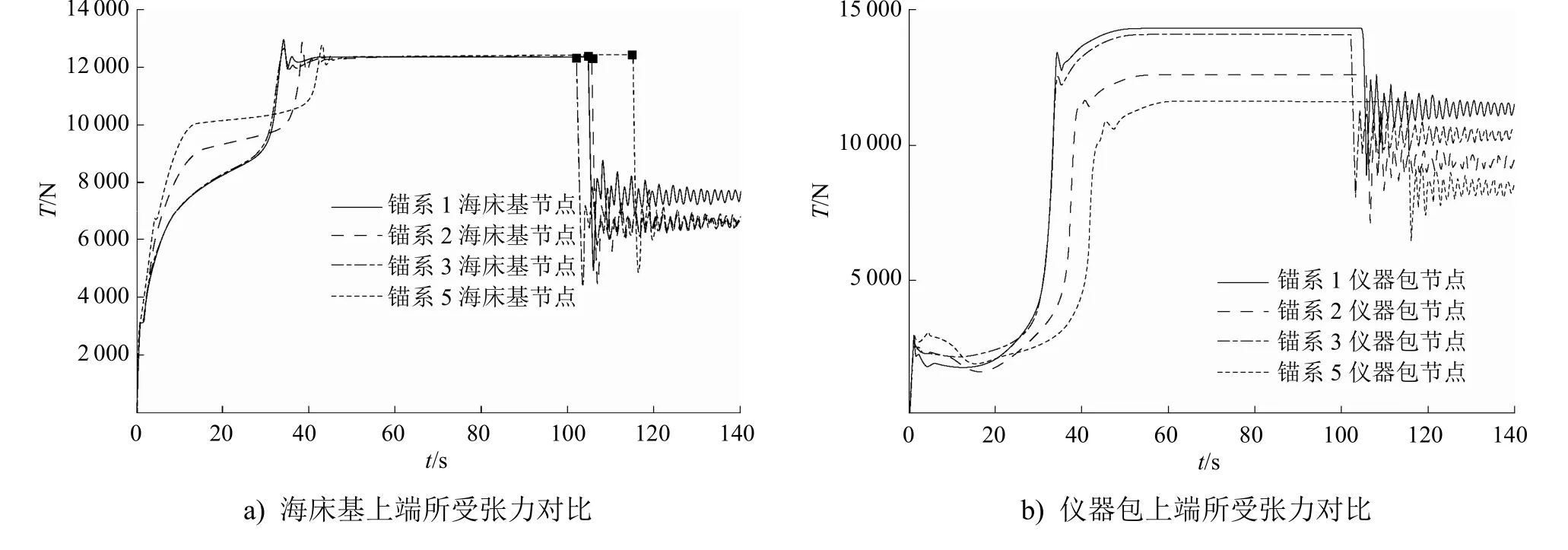
由圖8可知:方案1~方案4的潛標觸底時間依次為101.7s、104.4s、105.3s和114.7s,即隨著浮力部件的增加,潛標觸底時間變長;增加浮力部件對海床基上端所受張力的峰值幾乎沒有影響,但可降低其穩態張力;對于儀器包和主浮體,增加浮力結構可有效降低其張力峰值和穩態張力值。
3.3 海床底質環境的影響
海床底質可能為淤泥、沙質和巖石底質等。隨著底質的逐漸密實,海床的剛度系數會逐漸增大。選擇3種海床底質的剛度系數,即K
=10kN/m(底質1)、K
=20kN/m(底質2)、K
=40kN/m(底質3),研究海床底質對潛標布放運動的影響。圖9為方案4在3種海床底質剛度系數下的張力變化情況。由圖9可知:在3種海床底質剛度系數下,方案4的海床基節點所受峰值張力和穩態張力幾乎是一樣的,即不同剛度的海床底質對海床基節點的峰值張力和穩態張力幾乎沒有影響,這可能是由于在觸底時海床基節點的張力已達到峰值;同時,在觸底過程中,海床基觸底會導致纜索松弛,并在浮力的作用下呈現張緊狀態,即在觸底過程中,纜索交替出現松弛、張緊現象。這種現象因海床底質剛度系數的不同而尤為明顯;海床底質的剛度越大,振動幅度和頻率越大。
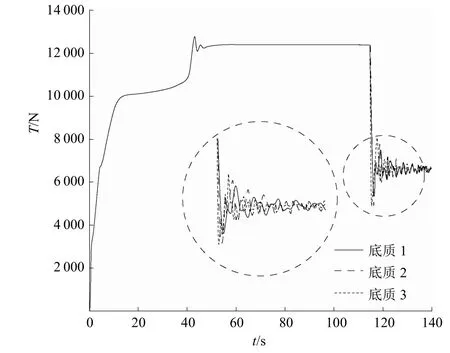
圖9 方案4在3種海床底質剛度系數下的張力變化情況
3.4 海流速度的影響
在布放潛標過程中,海流速度也不盡相同,海流對潛標的作用主要體現為拖曳作用。下面考慮海流速度分別為U
=0(環境1)、U
=-0 .2e(環境2)和U
=-0 .4e(環境3)等3種情況,研究潛標的運動軌跡。以方案4為例,海床基節點在不同海流的作用下呈現出不同的漂移量(見圖10)。圖10中,數據游標顯示值為穩態時,水平方向(x
方向)上的漂移量和鉛垂方向(y
方向)上的運動量。由圖10可知:當海流速度U
=-0 .4e時,潛標落地點坐標為(36.10, -200.3);當海流速度U
=-0 .2e時,潛 標 落 地 點 坐 標 為(47.81,-200.3);當海流速度U
= 0時,潛標落地點坐標為(60.35, -200.3);3種情況下潛標的水平漂移量分別為83.90m、72.19m和59.65m,即隨著海流速度的減小,潛標的水平漂移量逐漸減小。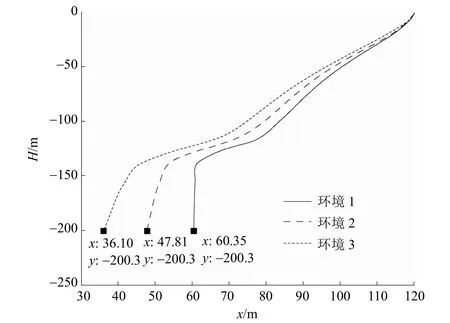
圖10 不同流速下海床基節點的運動軌跡
4 結 語
本文采用集中質量法將潛標離散為多個集中質量節點與無質量彈簧連接,對潛標在布放過程中的受力情況進行分析,并編制MATLAB程序模擬分析4種配置的模型、3種剛度的海底底質和3種海流速度情形下潛標在布放過程中的漂移量和觸底時間的變化情況,研究結果如下:
1) 在保證總浮力滿足需求的前提下,適當在關鍵部位增加浮力部件有助于提高潛標回收的可靠性,但在布放潛標時會增加其水平漂移量,并在一定程度上延遲觸底時間。浮力部件的安裝位置對潛標水平漂移量的影響較小。
2) 海流速度對潛標漂移量的影響也需考慮,海流速度越大,潛標漂移量越大。因此,在布放潛標時需考慮當地海流的速度。
3) 3種海床底質條件對纜索的峰值張力和穩態張力的影響非常小,這可能是由于在潛標觸底時各節點的張力已達到峰值。同時,在觸底過程中,纜索交替出現松弛和張緊現象,海床底質的剛度越大,纜索的動態振動幅度和頻率就越大。
