基于免疫連通模型與Dijkstra算法的垃圾桶區(qū)域化管理控制系統(tǒng)?
2021-07-16 14:05:16鹿順航曾志輝
電子器件 2021年3期
關鍵詞:區(qū)域化
陳 立 鹿順航 曾志輝?
(1.江西工業(yè)工程職業(yè)技術學院信息工程學院,江西 萍鄉(xiāng) 337000;2.河南理工大學電氣工程與自動化學院,河南 焦作 454003)
在日常生活中,垃圾桶的身影無處不在,垃圾桶的廣泛應用在帶來便捷、環(huán)境保護的同時也帶來了很多麻煩,在社區(qū)諸多地方垃圾桶因垃圾裝滿后沒有得到及時處理而造成環(huán)境二次污染,尤其是不可回收垃圾、有害垃圾,雖然目前很多智能垃圾桶的出現(xiàn)解決了這些問題,但由于其信息傳輸慢,功耗大,特別是在復雜的環(huán)境中,會出現(xiàn)信號丟失、軟件錯誤等故障,并不能很好地對垃圾桶實現(xiàn)監(jiān)測和管理。為了解決這一問題,設計一種基于免疫連通模型與Dijkstra 算法的垃圾桶區(qū)域化管理控制系統(tǒng)。
該系統(tǒng)主要由子系統(tǒng)節(jié)點、總站節(jié)點和系統(tǒng)管理后臺組成。子系統(tǒng)利用人體感應模塊檢測垃圾桶周圍是否有人,利用超聲波傳感器測距檢測垃圾桶內部剩余多少空間、利用紅外線傳感器檢測垃圾桶是否裝滿、通過電機驅動模塊實現(xiàn)對壓縮板以及對垃圾蓋的控制。利用LoRa 組網技術,構建了一種垃圾桶區(qū)域化管理控制系統(tǒng)。
汪華斌等[1]采用ZigBee 技術實時監(jiān)控城市的垃圾信息,但沒有設計垃圾桶的防溢出功能,且并沒有考慮傳輸距離的問題,范晨陽等[2]提出了利用NB-lot技術解決傳輸距離問題,并設計了垃圾桶的防溢出功能,但并沒有實現(xiàn)對垃圾車的調度。基于以上考慮,為了解決垃圾桶裝滿后沒有得到及時處理而造成環(huán)境二次污染的問題,提出一種基于免疫連通模型與Dijkstra 算法的垃圾桶區(qū)域化管理控制系統(tǒng),利用系統(tǒng)管理后臺來監(jiān)視城市垃圾桶垃圾,并設計了垃圾桶的防溢出功能,有效地解決了垃圾桶垃圾溢出問題,并利用LoRa 技術實現(xiàn)垃圾桶的區(qū)域化管理,合理地調度垃圾車,有效地節(jié)約垃圾車資源。
1 系統(tǒng)總體框架設計
垃圾桶區(qū)域化管理控制系統(tǒng)共包括3 部分,即子系統(tǒng)節(jié)點、總站節(jié)點和系統(tǒng)管理后臺。系統(tǒng)框架圖如圖1 所示。
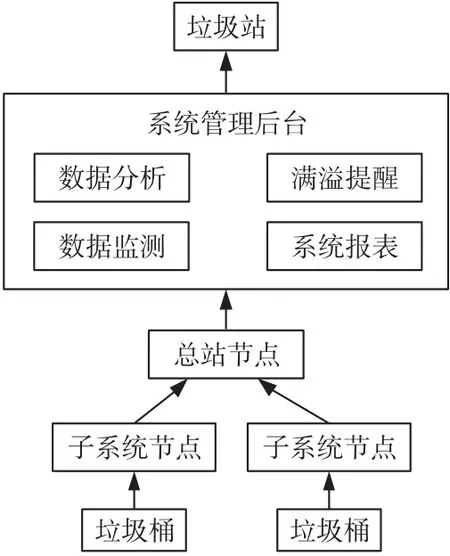
圖1 系統(tǒng)總體框架
LoRa 節(jié)點與垃圾桶連接構成子系統(tǒng)節(jié)點,子系統(tǒng)節(jié)點利用多傳感器技術,采集垃圾桶內部的剩余容量信息,并通過電機驅動模塊實現(xiàn)垃圾桶防溢出、垃圾蓋自動開閉等功能,通過無線LoRa 技術發(fā)送至LoRa 總站;LoRa 總站與微處理器連接構成總站節(jié)點,起監(jiān)視、合理派送垃圾車的作用。垃圾桶的模型圖如下圖所示:
系統(tǒng)管理后臺和總站節(jié)點設置在垃圾站,總站節(jié)點將信息處理后上傳至系統(tǒng)管理后臺,系統(tǒng)管理后臺通過JAVA 技術開發(fā)實現(xiàn)數(shù)據(jù)監(jiān)控、系統(tǒng)報表、數(shù)據(jù)分析和滿溢提醒等功能。系統(tǒng)的具體結構如圖2 所示。

圖2 系統(tǒng)具體結構圖
2 基于免疫連通模型的Dijkstra 算法設計
2.1 信號采集
系統(tǒng)利用多傳感器技術采集信息,其中人體感應模塊檢測垃圾桶周圍是否有人、紅外檢測模塊檢測垃圾桶是否裝滿、超聲波測距模塊用于檢測垃圾桶內部剩余多少空間。信息處理模塊對采集的信息進行處理并發(fā)送至LoRa 子站主控板,LoRa 子站主控板控制根據(jù)信息處理模塊發(fā)送的信息控制電機驅動模塊,并對垃圾桶內部的剩余容量信息進行處理后發(fā)送至總站節(jié)點。
2.2 Dijkstra 算法設計
Dijkstra(迪杰斯特拉)算法常用來尋找?guī)嘤邢驁D中節(jié)點之間的最短路徑。針對本系統(tǒng),本系統(tǒng)可利用Dijkstra 算法減少垃圾站與垃圾桶之間信息傳遞所消耗的能量。
利用Dijkstra 算法求解最短路徑,簡要步驟如下:
(1)設未確定的最短路徑節(jié)點集合、已確定的最短路徑節(jié)點集合分別為X和Y,并設起始點到其他所有節(jié)點的最短路徑值為T,并利用權圖的鄰接矩陣對T進行過初始化。
(2)若起始點s到點i的最短路徑的長度為T[i],把i從X放到Y中。
(3)利用節(jié)點i更新數(shù)組T中起始點s到數(shù)組Y中的節(jié)點k對應的路徑值。
(4)重復步驟1、2 直至找到起始點s到所有節(jié)點的最短路徑值。
路徑質量常用來評估傳輸穩(wěn)定性和可靠性,當路徑質量低于闕值時,表示節(jié)點發(fā)生故障。將子系統(tǒng)節(jié)點Ni和總站節(jié)點T之間的路徑質量Q定義為子系統(tǒng)節(jié)點和總站節(jié)點剩余能量與距離的歸一化權重和,定義為:

式中:λ為權重系數(shù),滿足λ1+λ2=1;Ei表示子系統(tǒng)節(jié)點Ni的剩余能量;Esi表示節(jié)點的初始能量;Di表示子系統(tǒng)節(jié)點Ni與總站節(jié)點的路徑長度。
2.3 區(qū)域化免疫連通模型設計
目前,對免疫連通模型運用在無線傳感器網絡的研究有:運用遺傳樣本優(yōu)化和蒙特卡洛評價函數(shù)最大化傳輸效率,基于二進制和概率模型的集中免疫泰森多路徑優(yōu)化傳輸[3],多目標免疫協(xié)同進化算法[4],泰森盲區(qū)多邊形傳輸控制[5],基于免疫連通模型的多路徑傳輸選擇算法[6]。基于以上考慮,區(qū)域化免疫連通模型構建如下:
抗體:垃圾桶與垃圾站之間的連通路徑保證網絡連通性和傳輸可靠性。
抗原:垃圾站監(jiān)控區(qū)域內所有的垃圾桶。
抗體抗原親和力評價函數(shù)f:垃圾桶與垃圾站之間網絡傳輸可靠性的保證能力。單條路徑質量評價函數(shù)定義為式(2)。

式中:pi為第i條傳輸路徑,qi為該路徑鏈的質量,w為路徑鏈的數(shù)量。相應的M條傳輸路徑的質量評價函數(shù)為式(3)。

抗體編碼規(guī)則:垃圾站檢測區(qū)域內的所有的垃圾桶以二進制編碼,二進制編碼位數(shù)為垃圾桶數(shù)量的最小值。
抗原/抗體(基因)變異規(guī)則:二進制數(shù)0 隨機變?yōu)?,二進制數(shù)1 隨機變?yōu)?,抗原變異后的節(jié)點須在上一節(jié)點的射頻覆蓋范圍內,抗體的變異須在垃圾站和垃圾桶之間保持連通性,沒有連通的抗體無效。
變異種群設置:最初隨機建立w個有效抗體,保持垃圾站和垃圾桶之間的連通性。抗體的變異按照自適應遺傳算法[7]中交叉概率Pc與變異概率Pm進行變異生成新的抗體群,Pc和Pm由式(4)和式(5)給出。

式中:fmax為抗體中路徑的最大值,favg為抗體中路徑質量的平均值,fd為變異抗體的評價值,fc為耦合交叉抗體的評價值,k1,k2,k3,k4為常數(shù)。
2.4 基于免疫連通模型的Dijkstra 算法
利用Dijkstra 算法選擇最短路徑傳輸,子系統(tǒng)節(jié)點和總站節(jié)點容易產生多條最短路徑,通過免疫機制來選擇合適的最短路徑,還有效彌補了Dijkstra 算法中剩余節(jié)點能量對通信的影響,以及解決了節(jié)點意外故障對數(shù)據(jù)傳輸?shù)挠绊憽K惴▓?zhí)行流程圖如圖3 所示。

圖3 基于免疫連通模型的Dijkstra 算法
算法執(zhí)行步驟如下:
首先,算法根據(jù)垃圾桶數(shù),垃圾桶位置,通信距離和檢測區(qū)域大小,建立能量矩陣,建立初始抗體群,對抗原抗體進行二進制編碼。子系統(tǒng)節(jié)點根據(jù)式(1)判斷節(jié)點的通信質量,選擇從垃圾桶到垃圾站的w條傳輸路徑作為w個抗體。
用式(2)對所有的抗體成員進行評價,挑選出a個抗體作為初始抗體成員群,即C={p(1),p(2),…,p(a)}。用式(3)對選擇出的路徑進行評價,篩選出滿足條件的路徑,并對這些路徑進行Dijkstra 算法求解,選出新的路徑組成優(yōu)秀抗體群。
判斷優(yōu)秀抗體群的剩余能量是否小于節(jié)點剩余能量最小值,選出滿足條件的抗體節(jié)點,并對選出的抗體節(jié)點進行抗體節(jié)點變異,根據(jù)抗體節(jié)點變異的規(guī)則,對抗體群里的節(jié)點按照式(4)、式(5)進行變異。用式(3)變異后的新抗體進行評價,評價后與原抗體混合比較,選擇全局最優(yōu)的路徑,并循環(huán)執(zhí)行上述步驟直至迭代次數(shù)超過預先設計值。
子系統(tǒng)節(jié)點利用該算法對發(fā)送的信息進行處理后發(fā)送至總站節(jié)點,可有效地解決節(jié)點意外故障對數(shù)據(jù)傳輸?shù)挠绊懀_到信息最優(yōu)化傳輸和減少節(jié)點能耗的目的。
3 垃圾桶防溢出功能設計
垃圾桶經常存在垃圾溢出現(xiàn)象,因此需要給垃圾桶設計防溢出功能,即利用垃圾桶內部的LoRa 子站主控板根據(jù)信息檢測系統(tǒng)檢測到的信息控制電機驅動系統(tǒng)完成壓縮板自動壓縮和垃圾蓋自動關閉。
垃圾桶防溢出設計的流程圖如圖4 所示。
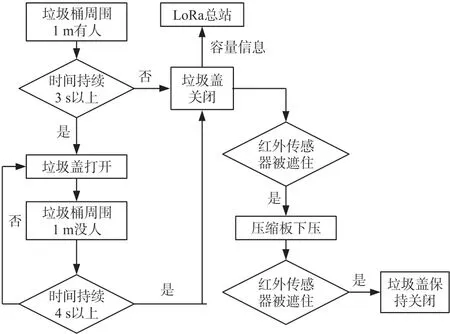
圖4 垃圾桶防溢出流程圖
具體實施過程如下:
步驟1 人體感應傳感器及電機驅動模塊在垃圾桶的頂部,人體感應傳感器檢測到垃圾桶周圍1 m 有人且時間持續(xù)3 s 以上時,電機驅動模塊控制垃圾蓋打開。
步驟2 人體感應模塊檢測到垃圾桶周圍1 m沒人且時間持續(xù)4 s 以上時,電機驅動模塊控制垃圾蓋關閉,反之執(zhí)行步驟1。
步驟3 紅外傳感器位于垃圾桶的入口處,當垃圾蓋關閉后,判斷垃圾桶入口處紅外傳感器是被遮住,被遮住后執(zhí)行步驟5,否之,執(zhí)行步驟1。
步驟4 入口處的紅外傳感器被遮住后,電機驅動模塊控制垃圾桶頂部壓縮板自動下壓后上升。
步驟5 當垃圾桶入口處紅外傳感器再次被遮住時,垃圾蓋保持關閉,否之執(zhí)行步驟1。
步驟6 當垃圾桶內部的垃圾被回收后,系統(tǒng)將被復位。
4 實驗結果與分析
4.1 實驗設置
為了驗證該系統(tǒng)能夠實現(xiàn)信息最優(yōu)化傳輸和減少節(jié)點能耗以及是否能夠合理節(jié)約垃圾車資源,進行相關實驗驗證,對運用該算法的區(qū)域化管理系統(tǒng)與普通的區(qū)域化管理系統(tǒng)進行了實驗對比。
實驗將子系統(tǒng)節(jié)點隨機部署在1 000 m?1 000 m的模擬區(qū)域內,并將節(jié)點初始能量設置成E0=2 J;網絡延遲值設置為5;節(jié)點密度為200;速度為15 m/s。實驗分別從網絡壽命、傳輸延遲和垃圾車利用率三方面驗證。其中實驗制作的垃圾桶模型圖如圖5(a)、5(b)所示。

圖5 垃圾桶模型圖
系統(tǒng)的實物圖如圖6、圖7 所示。

圖6 子系統(tǒng)節(jié)點實物圖

圖7 總站節(jié)點實物圖
4.2 數(shù)據(jù)收集及分析
(1)網絡壽命
通過計算存活節(jié)點的數(shù)量從而得出網絡的效率,獲得子系統(tǒng)節(jié)點的平均通信輪回次數(shù),當75%的子系統(tǒng)節(jié)點能量耗完時,網絡可認為完全死亡。
圖8 顯示了本系統(tǒng)和普通的區(qū)域化管理系統(tǒng)的平均輪回次數(shù)的對比,根據(jù)圖8 可知,本系統(tǒng)的平均輪回次數(shù)比普通區(qū)域化管理系統(tǒng)的次數(shù)多,即本系統(tǒng)比普通系統(tǒng)的網絡壽命更長。

圖8 網絡壽命
(2)傳輸延遲
傳輸延遲是指包的接收時間與發(fā)送時間差,包括路由延遲以及數(shù)據(jù)傳輸延遲的平均值。
圖9 顯示了本系統(tǒng)和普通的區(qū)域化管理系統(tǒng)的平均傳輸延遲的對比,根據(jù)圖9 可知,本系統(tǒng)的平均延遲時間比普通區(qū)域化管理系統(tǒng)的時間短。

圖9 傳輸延遲
(3)垃圾車利用率
假設每個子系統(tǒng)節(jié)點即垃圾桶裝滿垃圾需要10 s,設置同樣的垃圾桶數(shù)量,比較普通系統(tǒng)和本系統(tǒng)使用垃圾車的數(shù)量,使用垃圾車的數(shù)量越少,垃圾車的利用率越高,
圖10 顯示了本系統(tǒng)和普通區(qū)域化管理系統(tǒng)的垃圾車利用率對比,根據(jù)圖10 可知垃圾車利用率隨子系統(tǒng)節(jié)點數(shù)的增加而升高,無論子系統(tǒng)節(jié)點少或者多,本系統(tǒng)的傳垃圾車利用率比普通系統(tǒng)高。
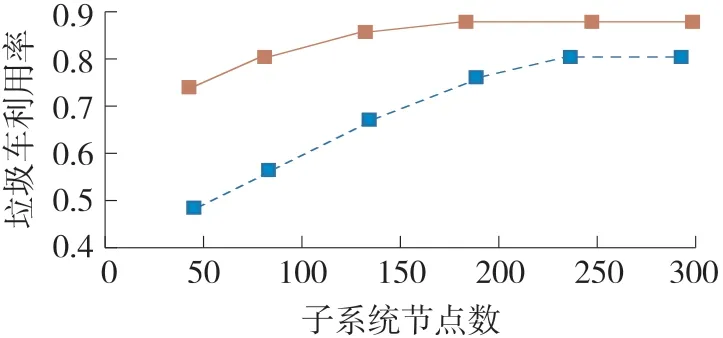
圖10 傳輸可靠性
5 結語
所提出的一種基于免疫連通模型與Dijkstra 算法的垃圾桶區(qū)域化管理控制系統(tǒng),不僅可以解決在社區(qū)諸多地方垃圾桶因垃圾裝滿后沒有得到及時處理的問題,還可以提高信息最優(yōu)化傳輸以及減少節(jié)點的能耗,合理地使用垃圾車資源,實現(xiàn)垃圾站對垃圾桶準確監(jiān)測和管理。
猜你喜歡
軍民兩用技術與產品(2022年6期)2022-08-06 07:31:20
江蘇安全生產(2022年1期)2022-03-09 06:24:54
煤氣與熱力(2021年11期)2021-12-21 07:15:32
礦產勘查(2020年5期)2020-12-25 02:39:00
云南醫(yī)藥(2019年3期)2019-07-25 07:25:20
中國勞動關系學院學報(2016年1期)2016-09-26 01:56:51
黨員生活(2015年5期)2015-05-20 19:46:43
河北地質大學學報(2015年5期)2015-02-27 13:10:01
浙江人大(2014年1期)2014-03-20 16:19:57
絲綢(2014年4期)2014-02-28 14:55:12
