區(qū)間阻抗下無人駕駛接駁出租車合乘路徑優(yōu)化
2021-07-19 13:07:28劉津洋
公路與汽運(yùn) 2021年3期
關(guān)鍵詞:模型
劉津洋
(長沙理工大學(xué) 交通運(yùn)輸工程學(xué)院, 湖南 長沙 410114)
實(shí)際交通網(wǎng)絡(luò)中行程時(shí)間包含很多不確定性。基于不確定條件對交通網(wǎng)絡(luò)的路徑優(yōu)化研究主要分為兩類:一是基于概率分布的期望時(shí)間,研究路徑的行程時(shí)間概率分布;二是基于區(qū)間數(shù)據(jù)表達(dá),用區(qū)間數(shù)據(jù)表示路網(wǎng)中的種種不確定性因素。現(xiàn)實(shí)生活中難以獲取較精確的數(shù)據(jù),而通過概率分布選取的最佳路徑與數(shù)學(xué)模型的期望值成相關(guān)關(guān)系,但不能稱之為最可靠路徑。可見,更適合采用區(qū)間數(shù)據(jù)表達(dá)路網(wǎng)的不確定性。
2020年是中國無人駕駛車輛落地試運(yùn)營的開局之年,全國各地多城市陸續(xù)開展了試運(yùn)營相關(guān)測試。現(xiàn)階段無人駕駛出租車不可隨意切換路徑,乘客必須在指定位置上下車。該文將多輛無人駕駛接駁出租車和合乘問題相結(jié)合,建立基于區(qū)間阻抗的最短路徑優(yōu)化模型。
1 問題描述
區(qū)間阻抗下無人駕駛接駁出租車合乘路徑優(yōu)化是以原始最短路模型為基礎(chǔ),考慮路網(wǎng)間阻抗的不確定因素,結(jié)合決策者的區(qū)間分析方法,形成對應(yīng)約束條件,建立在區(qū)間阻抗數(shù)據(jù)背景下的最短路優(yōu)化模型。模型可運(yùn)用于出行者的路徑方案選擇決策,根據(jù)所求結(jié)果選擇最佳出行路徑方案。將路網(wǎng)詳細(xì)描述成有向網(wǎng)絡(luò)圖G=(V,A),其中V表示路網(wǎng)圖中所有節(jié)點(diǎn)集合,A表示路網(wǎng)圖中所有邊的集合。起點(diǎn)、終點(diǎn)r,t∈V,(i,j)∈A表示路網(wǎng)內(nèi)任意一條邊,賦予邊的區(qū)間阻抗為[lij,uij],共有n輛車,每輛車的最大載客為Q人。路網(wǎng)中每個需求點(diǎn)有對應(yīng)的上車需求人數(shù),同時(shí)規(guī)定車輛行駛最大時(shí)間Tmax,目標(biāo)是滿足所有上車需求點(diǎn)且在規(guī)定時(shí)間內(nèi)調(diào)度方案的魯棒成本最小。
在區(qū)間阻抗背景下,兩兩區(qū)間值因?yàn)榉N種不確定因素不能進(jìn)行直接比較,應(yīng)考慮魯棒偏差,即考慮出行者所選路徑與當(dāng)前情景下最短路的差值。某種情景用s表示,魯棒偏差是在某種情景下與之相對應(yīng)的網(wǎng)絡(luò)整體狀態(tài)。如從起點(diǎn)r到終點(diǎn)t的路徑方案p,其魯棒偏差為:

魯棒偏差的大小可反映出行者選擇該路徑的后悔程度。因此,可根據(jù)所有情景下的魯棒偏差,找到魯棒偏差的最大值,再根據(jù)魯棒優(yōu)化的極小化極大值準(zhǔn)則尋找魯棒偏差的最小值路徑即魯棒最短路徑。這里的路徑魯棒性是在當(dāng)前情景選定路徑與最壞情景最短路徑之間的差值,出行者作出決策選擇魯棒最短路方案后,即使在所有不確定因素全部發(fā)生的條件下,也可保證當(dāng)前的魯棒最短路方案與實(shí)際最短路徑差值最小。對交通樞紐接駁車輛、特殊工種車輛、災(zāi)區(qū)應(yīng)急物流等有硬時(shí)間窗約束或?qū)r(shí)間可靠性要求高的路徑方案進(jìn)行決策時(shí),路徑魯棒性可作為關(guān)鍵評價(jià)指標(biāo)。
2 模型構(gòu)建
基于以上分析,構(gòu)建魯棒最短路混合整數(shù)規(guī)劃模型。定義Xij、Wij為所選路網(wǎng)路徑?jīng)Q策變量,當(dāng)邊(i,j)在魯棒最短路徑上時(shí),Xij、Wij取1,否則取零。定義Y為車輛c所選路徑?jīng)Q策變量,經(jīng)過點(diǎn)i時(shí)取1,否則取零。以pickupi表示點(diǎn)i的乘車人數(shù),passnodes表示上車需求點(diǎn)集合(這里討論的情況為需求點(diǎn)全部滿足)。邊(i,j)的路徑行程時(shí)間Cij可表示為lbij+(ubij-lbij)Xij(lbij為路段ij的下界值;ubij為路段ij的上界值)。xt表示當(dāng)前情形下起點(diǎn)s到終點(diǎn)t的最短路徑時(shí)間,是一個隨變量Xijc取值而定的變量。混合整數(shù)規(guī)劃模型如下:
(1)
約束條件如下:
xj≤xi+lij+(ubij-lb)Xij;?(i,j)∈E
(2)
(3)
(4)
c∈1,…,n
(5)
(6)
Xijc+Xjic≤1,?i,j∈E,c∈1,…,n
(7)
c∈1,…,n
(8)
(9)
c∈1,…,n
(10)
(11)
(12)
式中:E為路網(wǎng)中所有i、j點(diǎn)的集合。
式(1)中xt可描述為:
Xijc)]Wijc
(13)
對于Wijc,有:
(14)
式(1)為目標(biāo)函數(shù)模型,表示求最小魯棒成本下最優(yōu)路徑;式(2)為當(dāng)前情景下最短路徑約束;式(3)、式(4)為參照傳統(tǒng)最短路徑的所有選擇路徑的起點(diǎn)、終點(diǎn)約束;式(5)為路網(wǎng)各節(jié)點(diǎn)流量約束;式(6)表示上車需求點(diǎn)(必經(jīng)節(jié)點(diǎn))需全部滿足;式(7)為避免兩點(diǎn)間出現(xiàn)路徑成環(huán)現(xiàn)象的約束;式(8)為各車輛行駛最大時(shí)間約束;式(9)表示每一個上車需求點(diǎn)(必經(jīng)節(jié)點(diǎn))只能被一輛車服務(wù);式(10)表示上車需求點(diǎn)(必經(jīng)節(jié)點(diǎn))被車輛c服務(wù),與經(jīng)過當(dāng)前節(jié)點(diǎn)的車輛c為同一輛;式(11)為車輛c的最大載客量約束;式(12)為其余變量取值范圍。
3 算法設(shè)計(jì)
Benders分解算法在解決較大規(guī)模混合整數(shù)規(guī)劃、隨機(jī)規(guī)劃等問題方面應(yīng)用廣泛。運(yùn)用割平面的思想,將復(fù)雜變量固定后不斷迭代求解產(chǎn)生新的約束,產(chǎn)生新的約束后主問題的約束增加產(chǎn)生新解,通過不斷迭代計(jì)算求得最優(yōu)解。該文研究的魯棒成本,首先固定車輛路徑,再計(jì)算在該情形下的最短路徑,與Benders分解算法有異曲同工之處。因此,采用Benders分解算法對最小魯棒成本下最優(yōu)路徑模型進(jìn)行求解。步驟如下:

(2) 將路網(wǎng)中車輛經(jīng)過的所有路徑取區(qū)間阻抗的上界值,未經(jīng)過路徑取區(qū)間阻抗的下界值,求解子模型,獲得新的最優(yōu)解Wijc、Yic。如果目標(biāo)函數(shù)值小于上界UB值,則更新UB。
(3) 將Wijc代入主模型,形成式(15)所示新的約束條件,得到新的解Xijc、Yic。如目標(biāo)值z大于下界LB值,則更新LB。
lbij(1-Xijc)]Wijc
(15)
(4) 若UB=LB,目標(biāo)模型得到最優(yōu)解,停止計(jì)算。否則,進(jìn)入下一步。

4 算例分析
采用圖1所示交通仿真網(wǎng)絡(luò),對上述模型和算法進(jìn)行論證。該路網(wǎng)由26個節(jié)點(diǎn)、61條路段組成,兩點(diǎn)之間的區(qū)間阻抗值均作標(biāo)記。在AMPL中編寫B(tài)enders算法,寫出對應(yīng)主問題、子問題,并調(diào)用Gurobi求解器進(jìn)行求解。

圖1 路網(wǎng)測試圖
車輛數(shù)設(shè)定為3臺;需求點(diǎn)設(shè)置為7個,分別為路網(wǎng)中節(jié)點(diǎn)4、6、9、15、19、22、23,各點(diǎn)上車需求人數(shù)見表1;最大載客量設(shè)定為4,最大行駛時(shí)間設(shè)定為15 min。表1為車輛所滿足的各個需求點(diǎn),因設(shè)定最大載客量為4,需求點(diǎn)需求量的不同會對路徑產(chǎn)生不同約束。

表1 上車需求點(diǎn)分配
3輛車魯棒最短路徑見表2,總魯棒成本為26.7,路徑形成見圖2。

表2 魯棒最短路徑
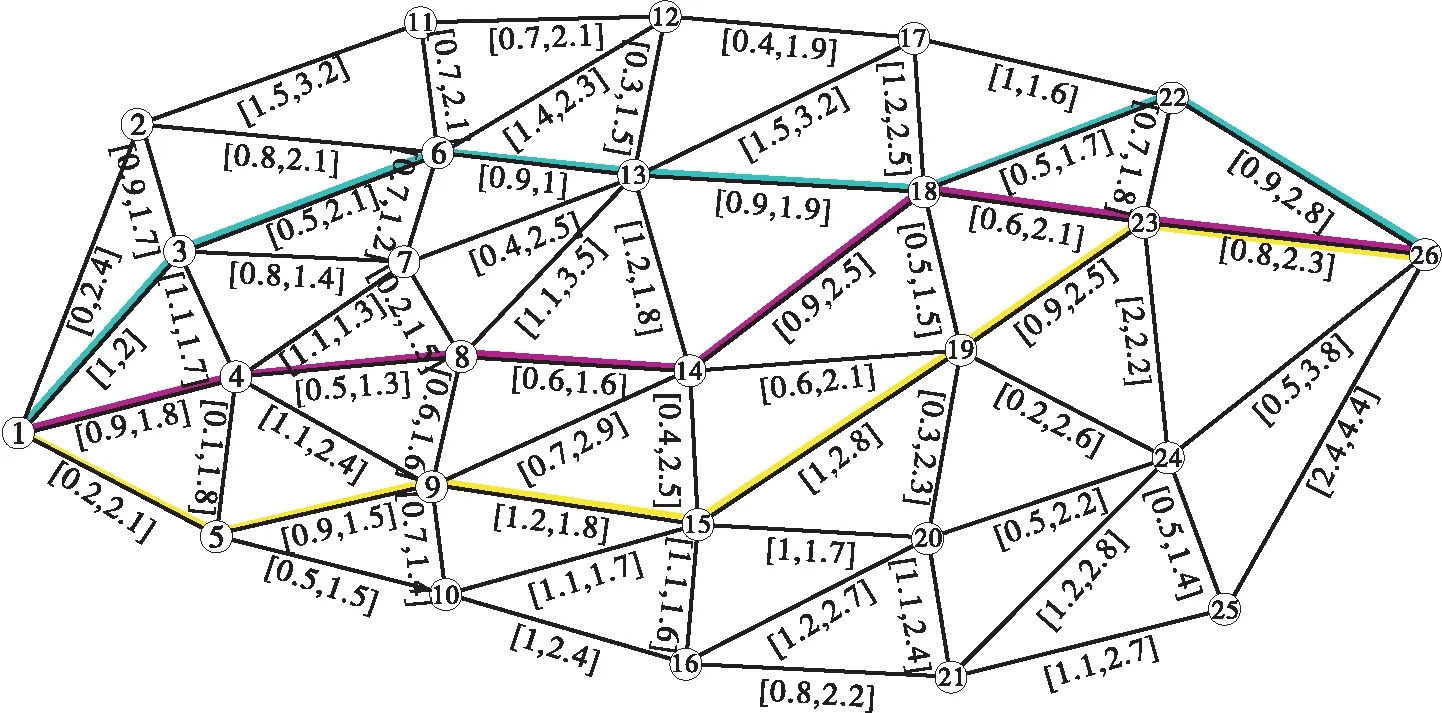
圖2 魯棒優(yōu)化路徑
表3為傳統(tǒng)下界最短路的車輛行駛路徑方案。雖然在3臺車的行程時(shí)間區(qū)間中,下界值均比表2中魯棒最短路徑的下界時(shí)間小,但總體魯棒成本大于表2中成本。魯棒成本越大,則行程時(shí)間的不穩(wěn)定性增加。說明所建立的基于區(qū)間阻抗的最短路徑優(yōu)化模型和算法可行,所得最短路徑相較于傳統(tǒng)最短路徑具有更強(qiáng)的魯棒性。

表3 下界最短路徑
5 結(jié)語
結(jié)合無人駕駛路徑研究熱點(diǎn),將多輛無人駕駛接駁出租車和合乘問題相結(jié)合,以總體魯棒為目標(biāo)成本,在滿足乘客需求下,將車輛資源、環(huán)境資源、時(shí)間資源等做到最大整合,最大限度滿足乘客需求和出行時(shí)間的穩(wěn)定性要求。考慮到出行者在路網(wǎng)中選擇出行路徑方案時(shí)間的不確定性,建立基于區(qū)間阻抗的最短路徑優(yōu)化模型,模型經(jīng)由CPLEX搭建并驗(yàn)證,驗(yàn)證過程中為避免非線性因素采用對偶模型,并設(shè)計(jì)Benders算法通過固定復(fù)雜變量進(jìn)行求解。算例驗(yàn)證結(jié)果表明該魯棒最短路徑相較于傳統(tǒng)最短路徑具有更強(qiáng)的魯棒性和穩(wěn)定性,對于接駁運(yùn)輸、應(yīng)急物流等均具有應(yīng)用價(jià)值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19