基于自動功率控制的EDFA泵浦驅動設計
2021-07-20 04:02:54姜倩文徐雅燕林瑜佳李文康
制導與引信 2021年1期
關鍵詞:信號
姜倩文, 徐雅燕, 林瑜佳, 李文康, 蒲 彬
(上海無線電設備研究所,上海201109)
0 引言
隨著衛星激光通信技術向著長距離、高速率的方向發展,對通信鏈路發射端提出了大功率、高可靠性、高調制速率的要求[1]。摻餌光纖放大器(EDFA)作為空間光通信最常用的光放大器件,面臨大功率、低噪聲、高穩定性的性能需求。EDFA基本結構主要包括激光泵浦源、摻餌光纖(EDF)以及光無源器件,其中激光泵浦源是決定EDFA增益大小和能否穩定輸出的核心因素之一[2-3]。由于半導體泵浦源電流和溫度的任何微小變化都會影響EDFA的輸出狀態[4-5],為保證EDFA的恒定輸出,穩定可靠的泵浦驅動控制電路至關重要[6]。
本文設計了一種基于自動功率控制(APC)的高功率EDFA泵浦驅動電路,利用模擬比例-積分-微分(PID)控制電路和基于對數放大的功率監測電路實現對功率驅動電路的閉環控制,保證光放大信號的恒功率穩定輸出。
1 級聯EDFA結構
為實現高功率的激光發射,系統采用級聯泵浦機制對入射光信號進行放大,兩級串聯泵浦結構如圖1所示。分光器Tap1和Tap2按照對應的分配比例將大部分能量透射進光纖系統,同時吸收小部分入射光能量送入光電檢測器Monitor1和Monitor2,用以監測EDFA輸入或輸出光功率。光隔離器ISO1~ISO3可抑制信號光反射形成的自激振蕩,并隔離后向放大器自發輻射噪聲(ASE)。泵浦激光器Pump1和Pump2用于提供光激勵,通過波分復用器 WDM1和WDM2分別將泵浦光耦合至摻餌光纖EDF1和EDF2,將基態鉺離子抽運至較高能級。光濾波器Filter1和Filter2對主波長附近的信號光濾波,同時過濾掉泵浦光源產生的噪聲光信號,保證輸出信號光的光譜質量。
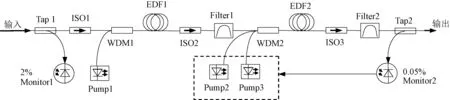
圖1 EDFA級聯泵浦結構
兩級泵浦結構中,由于前級的輸入光信號功率較小,為減小系統預放大噪聲系數,EDF1長度較短,使光纖內粒子數充分反轉,提高前級光放大信噪比。Pump1選用980 nm單模泵浦激光器,內部集成熱敏電阻及半導體制冷器(TEC),具有高量子效率、低噪聲、高穩定性的特點。Pump1驅動電路設計為固定增益,以獲得合適的前級輸出功率。Pump2和Pump3采用兩路大功率多模泵浦激光器并聯設計,通過自動功率控制電路調節泵浦激光器回路驅動電流,保證EDFA的穩定輸出。同時二級摻餌光纖EDF2長度較長,當泵浦光增大時能充分轉換為信號光,獲得較大的輸出增益。
2 APC驅動電路設計
2.1 基于模擬PID的功率控制電路
APC采用PID控制系統,如圖2所示。系統設定光功率對應的設置電壓Uref(t)與輸出抽運光功率對應的采樣電壓Umon(t)之差為功率誤差電壓Ue(t);Ue(t)進入模擬PID控制器,經過比例單元KpUe(t)、積分單元Ki∫Ue(t)dt和微分單元KddUe(t)/dt處理并線性組合后形成被控電壓Uctl(t),其中Kp、Ki、Kd為誤差幅度調節參數;再用Uctl(t)對二級泵浦驅動電路的泵浦電流進行控制,從而保證EDFA光功率穩定輸出[7]。
圖2虛線框內為模擬PID控制器。其中:比例單元KpUe(t)用于即時調節被控系統偏差的比例步進,偏差信號一旦產生,模擬PID控制器便立即產生控制作用,當比例作用過大時可能導致系統振蕩次數增加,穩定性降低;積分單元Ki∫Ue(t)dt用于消除系統穩態誤差,積分強弱取決于系統積分時間;微分單元KddUe(t)/dt反映系統誤差信號變化速率,通過引入誤差的偏差修正預判,減小恒功率控制系統的調節時間。
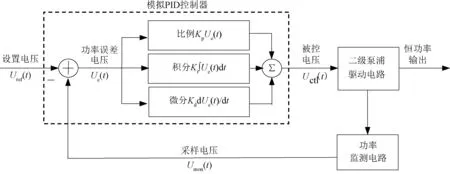
圖2 基于PID的自動功率控制框圖
本文利用運算放大器構成模擬PID控制器,具體電路如圖3所示。
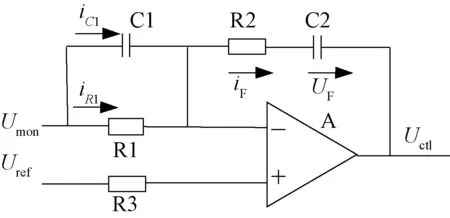
圖3 模擬PID控制器電路
根據系統設定的EDFA恒定輸出功率值,計算得出二級泵浦驅動所需控制電壓Uref。Uref送入運算放大器A的同向輸入端,反向輸入端為電阻R1、R2和電容C1、C2組成的負反饋控制電路,iF和UF分別為反饋端電流和電壓,Umon為經功率監測電路采樣的實際輸出抽運功率對應電壓,由此計算抽運功率控制電壓Uctl。

可以看出,被控抽運功率端為負反饋調節機制,當EDFA在工作過程中受到溫度或輸入光信號擾動時,功率監測電路的探測光功率變化隨即被反饋到運放反向輸入端,PID控制器電路將根據運放同向輸入端和反向輸入端的差值電壓及時調整驅動回路電流,使系統重新達到動態平衡。
2.2 二級泵浦驅動電路
半導體泵浦激光器為電流注入型器件,驅動電路的電流需連續可調,因此本文設計了圖4所示的電流積分負反饋電路來實現驅動電源的控制。因圖1中Pump2、Pump3的驅動電路為完全相同的并聯電路,圖4中泵浦激光器用Pump表示。運算放大器A1選用軌到軌運算放大器AD8552,場效應管MOSFET選用IRL5NJ024。模擬PID控制器輸出的控制電壓Uctl經過運算放大器A1及電容C1組成的電流積分電路對MOSFET進行控制。改變電容C1的容值可以控制MOSFET的打開時間,消除開關開合時產生的浪涌電流,實現驅動電路緩啟動。2.2 V電源為泵浦激光器提供偏壓,當MOSFET打開時,激光器回路導通,導通電流由控制電壓Uctl決定。電阻R4為采樣電阻,本文選用0.1Ω的功率電阻。采樣電壓經放大后進入信號處理系統,實現驅動回路工作電流的監測和控制。
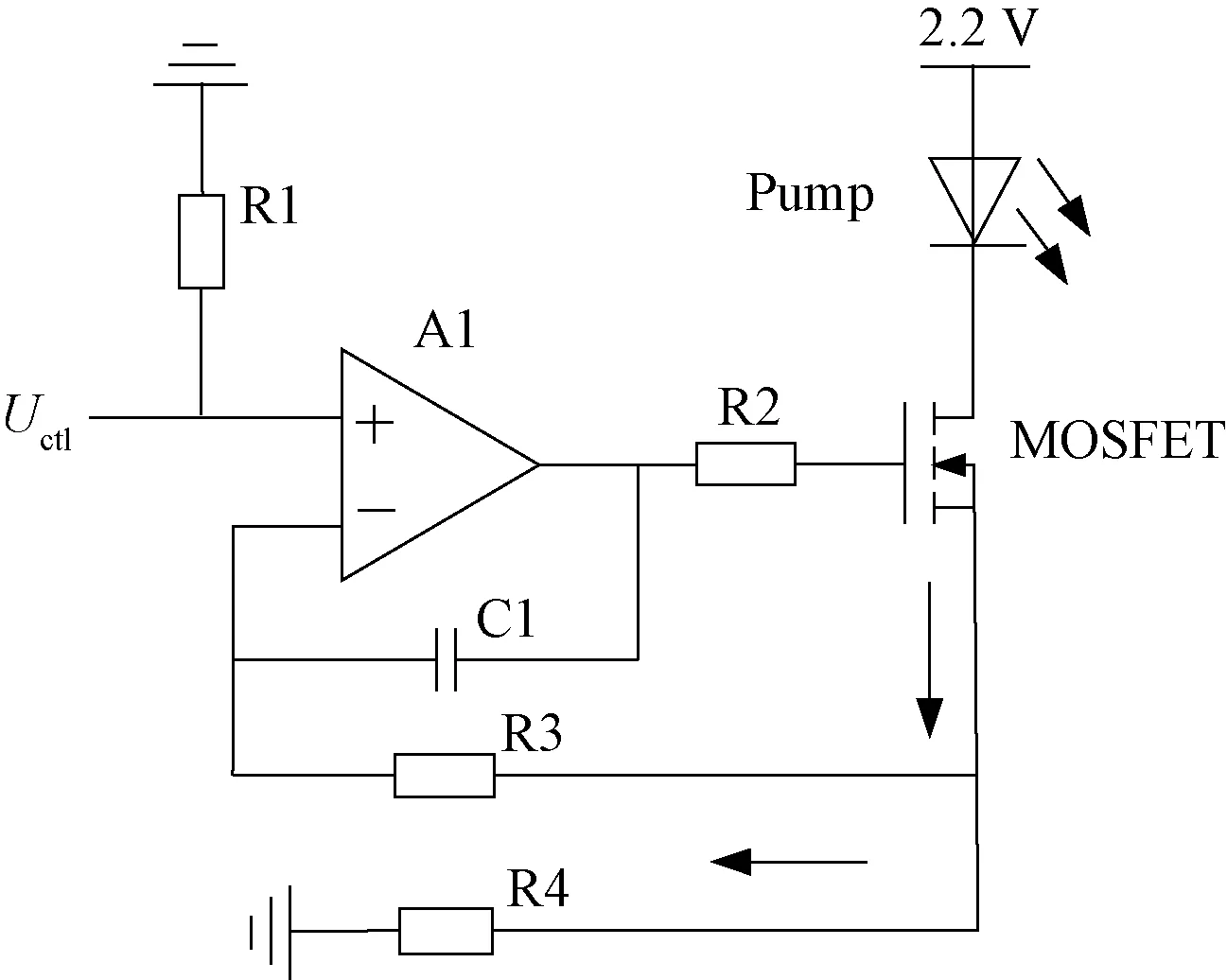
圖4 泵浦驅動電路
2.3 功率監測電路
基于對數放大電路設計了一種高精度寬動態范圍的功率監測電路。光電二極管將EDFA輸出端分光器分得的小部分光信號轉換成電信號,經過對數放大電路的放大處理,作為模擬PID控制器的反饋輸入信號。原理圖如圖5所示。
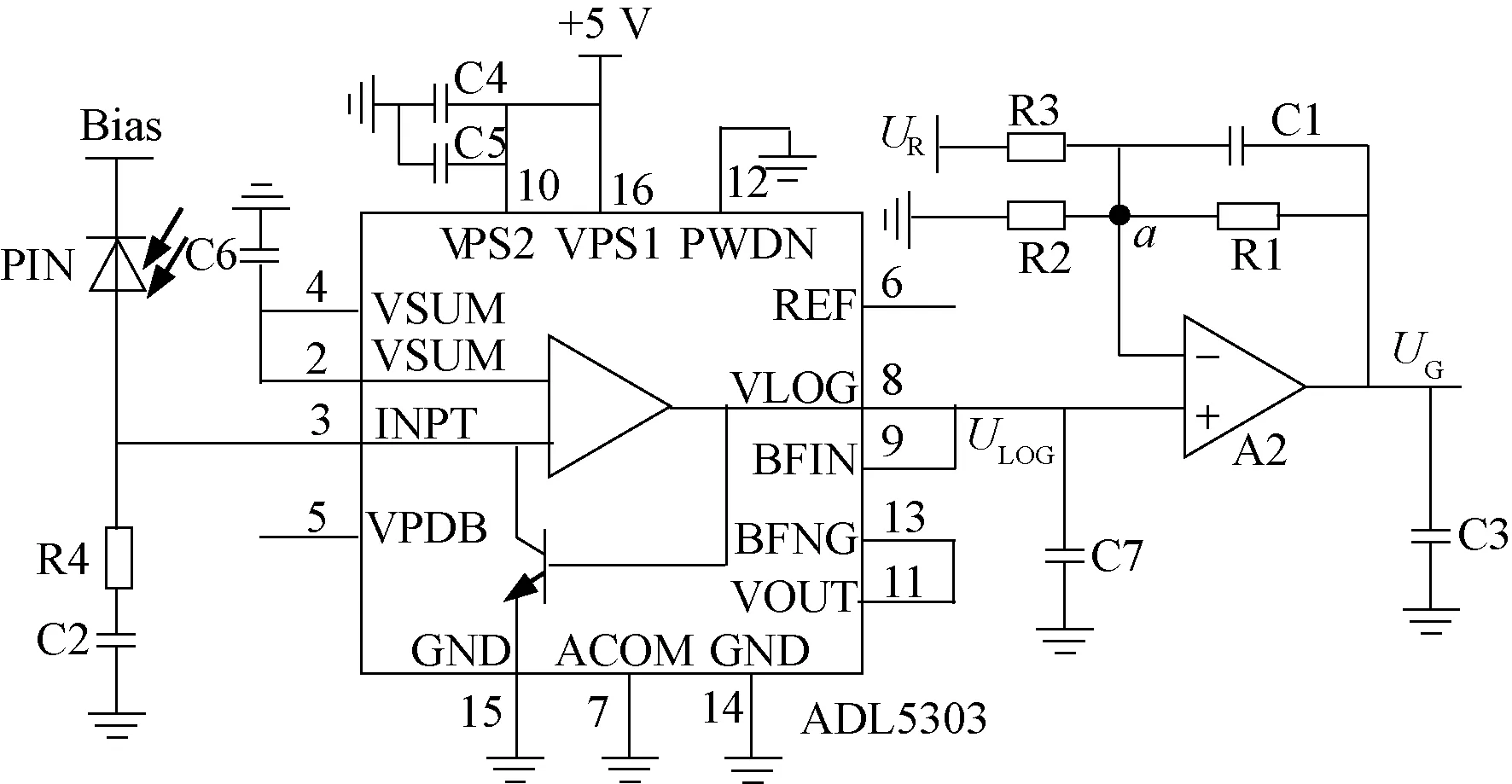
圖5 對數放大功率監測電路
光電探測器選用InGaAs型PIN光電二極管,該型光電二極管在1 550 nm波長下響應度為0.95 A/W,具有響應速度快、受溫度影響小的特點。選用ADL5303高精度對數轉換器,利用雙極型晶體管的基極-射極電壓與集電極電流的對數關系,實現被探測光電流的對數轉換。本電路具有160 dB的動態范圍,且對數輸出斜率截點可調,以適應電源電壓變化。Bias為PIN光電二極管提供反向偏置電壓,光照時產生的反向光電流隨光強變化,進入對數放大器的輸入級。施加于放大器INPT引腳的輸入電流IPD與中間級對數輸出引腳的電壓ULOG關系為

式中:UK為斜率電壓;IZ為截點電流。為適應后級信號處理量程子范圍,增加了斜率和截點調整電路。調整電路由運算放大器A2和外部反饋電阻R1、R2、R3組成,運算放大器A2同樣選用AD8552,UR為外部基準電壓源,為緩沖器反饋端提供偏壓,UG為監測電路輸出電壓。根據基爾霍夫電流定律,節點a處的電流i R1、i R2、i R3三者關系為
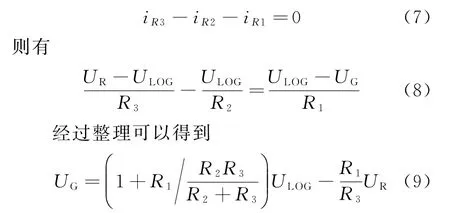
系統實際輸出光功率為(20~33)d Bm,分光比為0.05%時,輸出端PD實際接收功率為(-13~0)dBm。若斜率電壓UK=0.2 V,截點電流IZ=100 p A,由此計算得到VLOG端輸出電壓ULOG為(1.14~1.40)V。驅動回路可用量程為(0~5)V,基準電壓UR為2.5 V,為獲得合適的電壓輸出范圍,反饋電阻的阻值分別為R1=15.0 kΩ,R2=64.7 kΩ,R3=3.3 kΩ,則輸出電壓UG為(2.03~3.53)V。通過調整反饋電阻R1、R2、R3的阻值,電路可以適用于不同量程范圍的功率監測應用。
3 EDFA調試及試驗結果
設輸入信號光源峰值波長1 559 nm,實際光功率0 dBm,要求EDFA輸出光功率在33 dBm以上,且功率恒定可調。
前級泵浦源設置為固定增益,后級泵浦源保證恒功率輸出。通過閉環電路監測輸出光功率并控制后級泵浦源的驅動電流,當EDFA受輸入信號光功率波動或溫度等影響導致輸出功率變化時,功率監測電路的光電流響應隨之發生變化,模擬PID控制器依據偏差量改變控制電壓,調整功率輸出。采用兩個相同泵浦激光器同時工作,可在提高系統可靠性的同時分擔大電流壓力。輸出光功率設定為33 dBm時,2 h內測定的輸出功率如圖6所示,功率穩定度在1%以內。
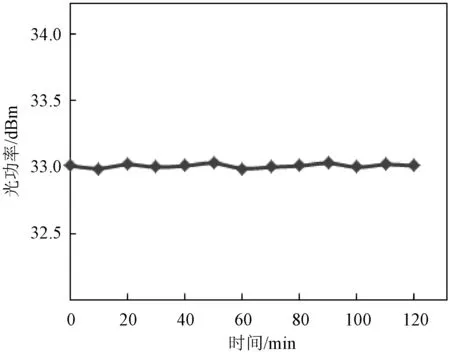
圖6 EDFA輸出功率實測曲線
被測電路底部設置熱沉,測量工作時間2 h內Pump2和Pump3的溫度及驅動電流,如圖7所示。可以看出,隨著后級泵浦激光器溫度升高,APC電路實時調整驅動電流,光功率穩定輸出,40 min后模塊溫度趨于穩定,達到熱平衡。
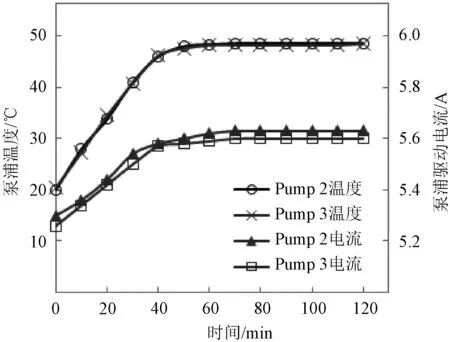
圖7 泵浦激光器溫度及驅動電流測試
對衰減后的輸出信號光進行波長測試,輸出光譜如圖8所示。輸出光譜中心波長為1 559 nm,與輸入光源峰值波長一致。
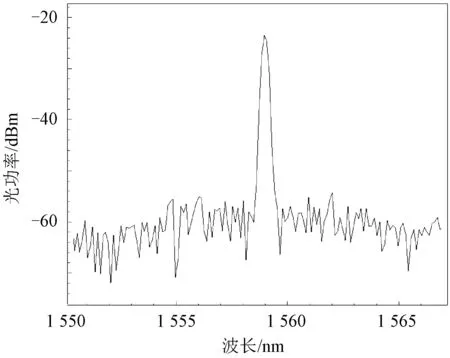
圖8 EDFA輸出光譜圖
4 結束語
本文介紹了一種級聯式EDFA自動功率控制泵浦驅動電路。功率控制電路采用模擬PID控制器實現功率誤差的實時調整;泵浦驅動電路利用電流積分負反饋實現驅動電源的有效控制;功率監測電路基于對數放大器實現高精度量程可調光電信號的監測。相比利用數字處理器實現功率的自動控制,本設計利用模擬電路閉環調整泵浦驅動電流,使EDFA穩定工作在系統設定的功率點,具有復雜度低、功耗低、可靠性高的優點。試驗結果表明:本自動功率控制電路可控制EDFA實現33 d Bm以上的恒功率輸出,功率穩定度在1%以內,對實際工程應用中選取控制參數、優化系統性能具有指導意義。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06