永磁同步電機無傳感器控制在電力推進中的應用綜述
2021-07-20 03:09:28鄧智浩李爭光祝后權詹宇聲
船電技術 2021年7期
關鍵詞:信號
鄧智浩,李爭光,祝后權,詹宇聲
永磁同步電機無傳感器控制在電力推進中的應用綜述
鄧智浩,李爭光,祝后權,詹宇聲
(武漢船用電力推進裝置研究所,武漢 430064)
在高性能的船舶電力推進系統中,通常依靠機械式傳感器為推進電機提供準確的轉子位置和速度等信息。但受艙室內惡劣環境的影響,傳感器的精度可能會下降甚至將信號完全丟失,此時可將無位置/速度傳感器控制算法得到的轉子相關信息作為備用,從而提高整個控制系統的可靠性。本文以基于矢量控制的永磁同步電機為研究對象,對各種主流的無傳感器控制方案的原理、特點和最新發展情況進行了介紹和總結,并對轉子初始位置定位和全速范圍復合控制等關鍵問題進行了簡要分析。
永磁同步電機 無傳感器控制 滑模觀測器 信號注入 轉子初始位置
0 引言
近年來,節能減排的純電動船舶成為實現內河綠色航運發展的關鍵。永磁同步電動機(PMSM)體積小、重量輕、設計安裝靈活、調速范圍寬、功率因數和效率高、易維護且冷卻簡單、相關技術日益成熟,故其作為船舶電推系統的主推進電機具備明顯的優勢。因此,船舶電力推進系統的永磁化成為未來艦船發展的重要趨勢之一。
本文選取反電勢為正弦波的永磁電機為被控對象。光電編碼器、旋轉變壓器等傳感器雖然可以準確地檢測轉子位置,但這些器件需安裝在轉子上,接口、接線等會使電機體積增大、密封性下降甚至造成信號丟失,同時也增加了轉軸的轉動慣量。機械式位置傳感器價格高昂且可靠性易受環境影響而降低,需要定期維護[1~2]。考慮到位置傳感器輸出信號的不確定性,引入無傳感器(為避免歧義本文中出現的“無傳感器”均指“無位置/速度傳感器”)控制技術對提高船舶電力推進系統可靠性具有重要的意義。此外,像輪緣、甲板機械、特種推進電機等設備根本無法安裝位置傳感器,對無傳感器控制的需求也較為迫切。
PMSM無傳感器控制技術源于上世紀末,發展成熟的幾類算法均對轉速范圍有要求,故在全速范圍應用時主要采取復合控制的方式。未來交流電機無傳感器技術將會向著更廣的調速范圍、更強的魯棒性、更高的估算精度和更低的運算成本等方向發展[4]。本文將對當前主流控制方案的原理及優缺點進行介紹并對相關的研究成果和關鍵技術進行總結。
1 永磁同步電機的數學模型及其矢量控制
1.1 永磁同步電機簡介
永磁同步電機屬于旋轉交流電機,當其穩定地進行機電能量轉換時,定子磁場會和轉子磁極的轉速保持嚴格的同步。根據永磁體在轉子上的位置可分為表貼式、嵌入式、內埋(內置)式,其中表貼式電機交、直軸電感相等,屬隱極式電機;嵌入式和內埋式電機結構不對稱性致其交、直軸電感不等,屬凸極式電機。結構凸極性對電機的無傳感器控制有很大影響。永磁電機既不需要換向器及電刷也無需電勵磁裝置,體積小、重量輕,不會發生失磁、環火;功率密度、功率因數、效率高;采用封閉結構使其齒輪噪音低、磨損小、冷卻簡單。因此永磁同步電機在船舶推進、航空航天、交通運載、先進自動化生產等效率、性能、安裝要求較高的場合中發展前景十分廣闊。
1.2 永磁同步電機數學模型

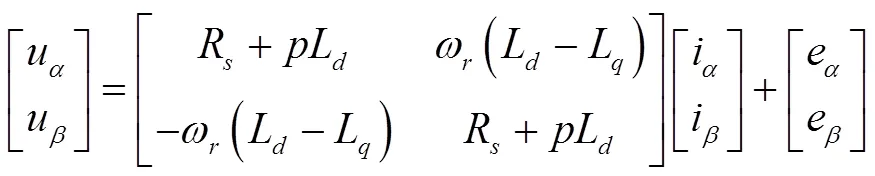



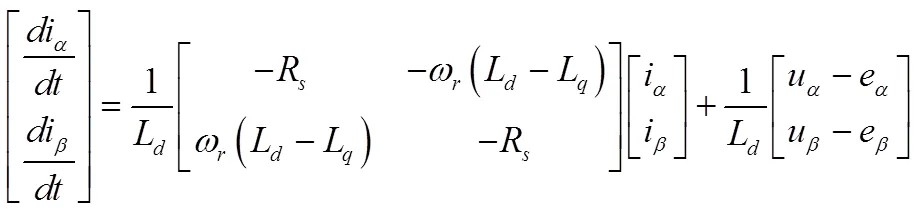
此外,PMSM轉矩和運動方程分別為



1.3 矢量控制
電機瞬態模型中的電壓、電流、磁鏈等均為空間矢量,可通過控制器對其相角和幅值進行調節進而控制電機運行。矢量控制最早源于Blaschke于1971年提出的磁場定向控制理論(FOC),通過坐標變換的方式對轉矩和磁鏈的控制進行解耦。隨后日本學者A.Nabae提出了空間矢量脈沖寬度調制技術(SVPWM)通過逆變器控制空間電壓矢量的作用時間和切換順序,使電動機獲得近似圓形的旋轉磁鏈,動態性能大幅提升。
2 各類PMSM無傳感器控制方法介紹
目前永磁同步電機無傳感器控制方法主要分為基于電機基波模型的非自適應算法和自適應算法以及基于電機凸極模型的信號注入算法。
2.1 基于電機基波模型的非自適應(開環)算法
這類方法根據電機基波模型進行開環計算。在電機參數準確時響應快,結果較為準確。但實際運行時電機參數易變精度無法保證且低速時很難準確測量定子反電勢。
2.1.1電流/電壓模型法
據式(1)和式(2)可知準確測出電壓、電流、電阻、電感等參數即可算得轉子位置
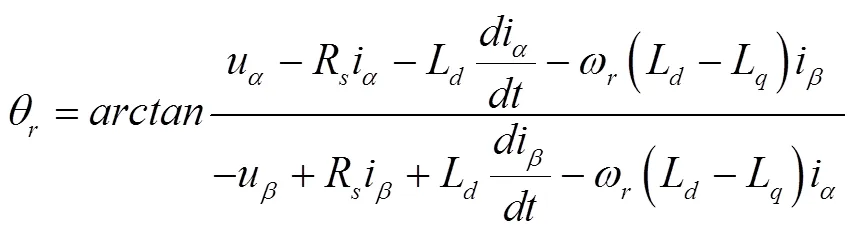
該法原理簡單,響應快,但計算用到了電流的微分且受溫度影響定子電感和電阻等參數不夠準確,降低了精度和可靠性。為了提高估算精度,有學者提出了一種改進電流模型法,根據每個采樣周期檢測到的電流實際值與估算值的誤差來修正轉子的估計位置,甚至可在精度要求不高的場合克服低速問題直接啟動[5]。
2.1.2基于電感變化的估算方法
凸極電機的同步電感是轉子位置的函數,可以通過檢測定子相電壓和相電流計算得到相電感值再查表獲取轉子位置。該法原理簡單、易于計算,但收斂速度慢、精度低、僅適合凸極電機而且飽和效應和參數變化都會影響電感值的獲取。
2.1.3反電勢法
1)反電勢積分法(磁鏈觀測法):電機穩態時定、轉子磁鏈相對位置不變均按照同步速度旋轉,角度相差負載轉矩角。因此轉子位置可以根據定子磁鏈而確定,而定子磁鏈可利用定子電壓方程通過反電勢積分法來獲得[4],即
2)擴展反電動勢法:磁鏈觀測法不適應于凸極電機,為解決這一問題,有學者提出了一種擴展反電動勢法,將凸極電機軸和軸上電感的直流分量和交流分量進行解耦,并將后者加入到定子繞組的反電勢中形成擴展反電勢,進而估算轉子位置。通過引入擾動觀測器可以抑制擴展反電勢中的高次諧波[10]。
3)反電動勢三次諧波法:利用磁路飽和效應或在永磁體磁鏈上加入三次諧波分量,均可在定子繞組上產生含三次諧波分量的反電動勢,利用三相電阻網絡測出反電勢信號并檢測其過零點可獲取轉子位置,也可以通過鎖相環對三次諧波信號進行處理來估算轉子位置。
4)反電勢過零法:該法在無刷直流電機無傳感器控制中應用較多,通過懸空相端電壓與中性點電壓的比較得到反電勢的過零點,確定換相時刻進而獲得轉子位置角。若電樞電感太小,中點電壓難以獲取,反電勢信噪比也很低。
2.2 基于電機基波模型的自適應(閉環)算法
上世紀末美國學者基于現代控制理論利用電機微分模型設計出了全階狀態觀測器和降階觀測器對包含轉子位置在內的所有狀態變量進行估計,實現了對電機轉速的閉環控制,精度較開環大幅提高,系統的魯棒性也較強,但低速時反電勢信噪比仍很小且易受干擾。
2.2.1滑模觀測器法(SMO)
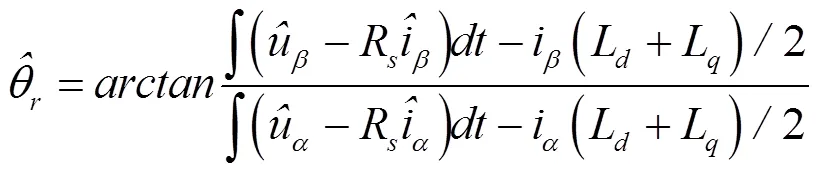
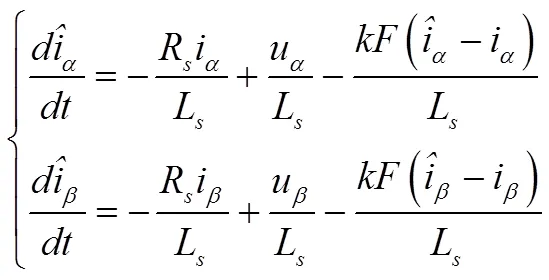
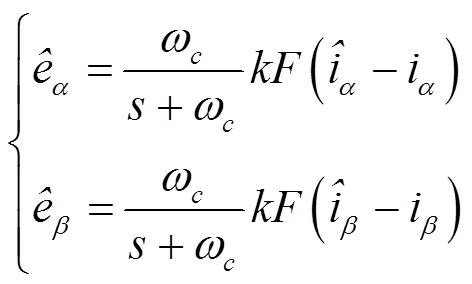
日本T.Furuhashi于1992年提出可將滑模變結構應用于狀態觀測器中對無刷直流電機進行無傳感器控制,隨后被推廣到PMSM。系統的動穩態性能僅取決于滑模面自身,對外部變化不敏感,魯棒性很強。但滑模結構因高頻變化的開關特性存在抖振且低通濾波器(LPF)的引入會削減高頻分量并造成相移。其原理圖及推導過程如圖1:

圖1 SMO法原理圖
將電流誤差作為滑模切換面,由式(3)可知對表貼式電機而言有
2.2.2擴展卡爾曼濾波器法(EKF)
卡爾曼濾波器是由美國R.E.Kalman于上世紀60年代提出的一種通過協方差矩陣來衡量預測值與實測值的關聯程度確定Kalman增益進而對線性系統在最小方差意義上實現最優估計的遞歸濾波器,可以在含有噪聲的測量中對系統的狀態進行觀測。擴展后的卡爾曼濾波器法可以對永磁同步電機等非線性系統的狀態變量進行觀測。
非線性系統在考慮系統和測量噪聲時的數學模型為:
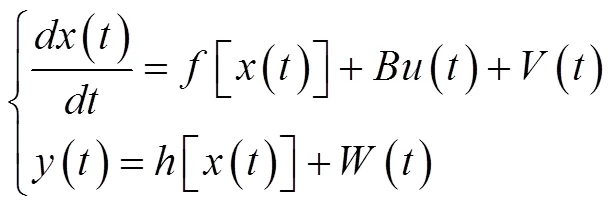
EKF法分為預測—計算(Kalman增益)-校正三個階段,即式(12),(13)和(14)



EKF采用實時遞推形式將非線性系統線性化再濾波,最突出的優勢是可以有效地削弱隨機干擾和測量噪聲,使輸出快隨地跟蹤實際狀態。隨著數字信號處理技術的發展,EKF法成為PMSM無傳感器控制領域研究的熱點。大批學者對降低EKF法的運算成本進行了深入研究,如通過基于FPGA并行的EKF算法簡化迭代過程[19]。值得注意的是,EKF法須選擇恰當的狀態變量,否則可能會在啟動過程中收斂到錯誤的結果[20]。
2.2.3模型參考自適應法(MRAS)
該方法的控制系統一般包括參考模型、可調模型以及自適應算法。可調模型中往往包含自適應系統的待估計量。通常將參數確定的PMSM自身作為參考模型,將含有待估計量的電流或電壓模型作為可調模型。一般采用三相電壓為輸入量,交、直軸電流為輸出量,將兩者的輸出量相比較,通過自適應算法不斷調整可調模型直至輸出相等。MRAS是基于Lyapunov穩定性理論或Popov超穩定理論設計的閉環算法,在參數準確的前提下精度較高、穩定性好[22]。為提高控制系統的動態性能和魯棒性,有學者采用基于STA的二階滑模觀測器取代傳統的PI控制器,性能更優。
2.2.4基于智能控制的改進閉環觀測法
智能控制理論的特點是具有較強的學習、決策、容錯、自適應能力和魯棒性。針對非線性系統的模糊控制和神經網絡控制在電機無傳感器控制中應用較多,如基于神經網絡控制的參數辨識[23]和反電勢估算;將模糊控制與SMO或MRAS法相結合[24];建立基于智能控制的觀測器等。
2.3 基于電機凸極模型的信號注入法
基于結構凸極性或飽和凸極性的電機凸極模型是信號注入法的理論基礎,該法不依賴電機的參數和工況,對測量誤差也不敏感,解決了零低速無傳感器控制的難題;但對硬件檢測電路要求較高,估算時間長,位置更新頻率低且高速運行時轉矩脈動大,動態性能差。由于船舶電推系統對低速性能要求不高,一般采用相對更簡單的I/F控制快速啟動,僅在某些特殊場合采用此類方法。
2.3.1高頻信號注入法
此類方法最早由美國Matthew J. Corley和R. D. Lorenz于1993年提出,該法通過注入特定頻率(0.2~2 kHz)的三相電壓或電流信號來人為地使電機產生不對稱的凸磁極,再檢測相應的高頻響應信號來獲取轉子的位置。注入頻率過高,會增加濾波難度,降低系統性能;注入頻率過低,會增加轉矩脈動,產生噪聲。該法不依賴反電勢,解決了零、低速范圍無傳感器控制的難題。根據信號的類型可分為以下三類:
1)旋轉高頻電壓注入法:向靜止兩相坐標系中注入高頻電壓并檢測電流響應,經帶通濾波器(BPF)濾波后提取含有轉子位置的電流負序分量來進行估算,適合電壓源型逆變器。為解決采樣、計算、濾波、逆變器非線性、波形畸變等因素帶來的延時問題,有學者提出了帶誤差補償的旋轉高頻電壓注入法,提高了估算精度[25]。
2)旋轉高頻電流注入法:與1)類似,將電壓信號改成電流信號并檢測電壓響應,適合電流源型逆變器。

有學者通過注入脈振高頻方波信號[27]省去濾波環節,提高了轉子位置估算的帶寬,但使損耗增加。考慮到磁場交叉飽和效應,有學者提出注入變角度方波電壓[28]提升動態性能;也有文獻采用雙陷波濾波器取代BPF級聯LPF[29]和利用二階全通濾波器進行帶通濾波消除二次諧波[30]等方式提高估算精度。
2.3.2低頻注入法

2.3.3基于在線電抗測量的間接磁鏈檢測法(INFORM)
該法基于電機的凸極特性也被稱為在線脈沖法,是一種在線測量方式。通過向電機注入不同方向的電壓矢量并檢測相應的電流響應,經過信號處理和計算得到轉子位置角度的估計值。該法實現難度低但估算時間較長且易引起相電流畸變和電機振動,特殊的PWM方式對控制器和采樣電路的要求較高。
2.3.4載波頻率成分法(CFCM)
該法的高頻激勵信號為逆變器固有的載波頻率信號,逆變器通常采用三相三角波載波SPWM模式,通過對載波頻率成分電流信號的包絡線進行處理或對載波頻率成分電流信號進行積分,實現轉子位置的估計且誤差在5°左右[31],可以有效解決附加損耗、噪聲和集膚效應等問題。CFCM法既不需要注入特定的信號,也無需改變原有控制結構,但受電機交、直軸電感比值影響大,對硬件檢測電路要求高,負載運行時的誤差較空載時更大且僅適合凸極電機[32]。
3 轉子初始位置定位
確定轉子初始位置才能使電機獲得最大的啟動轉矩保證船舶電推系統順利啟動,較大的位置誤差可能會導致啟動失敗甚至引起電機反轉。
閉環啟動要求對轉子位置進行實時跟蹤且轉子啟動前不能隨意轉動,電機凸極性是靜止狀態下轉子位置定位的理論基礎。有學者利用交、直軸電感差異,提出電感矩陣計算法進行定位;還有學者提出施加方向不同的等幅值電壓脈沖,根據定子電流最大值來確定轉子位置的旋轉電壓法[34],該法不依賴參數,通過不斷均分預估扇區可提高精度,但電壓脈沖的幅值和時間需不斷修正,精度也受采樣的影響;之后又有學者在此基礎上改用六組等寬電壓脈沖[35]提高了精度;還有文獻提出雙脈沖法、電流激勵法、基于INFORM的五脈沖電壓注入法[4]等進行位置辨識。此外,還有學者提出二次諧波法等基于高頻信號注入的方法,根據電流響應或電感飽和引起的阻抗變化來確定轉子位置并通過有限元計算進行了驗證[36]。
開環啟動包括預定位、外同步加速、自同步運行三個階段。這種方式操作簡便,大大降低了控制的難度。但也存在諸多弊端,如很多場合不允許轉子隨意轉動且預定位階段存在死區可能無法產生足夠大的電磁轉矩;加速階段可能發生電機失步;整個定位過程用時較長。有學者輪流施加三個互差120°的電壓矢量驅使轉子達到預定位置,使電壓矢量幅值下降,定位精度提高,死區范圍減小,可靠性增強[33]。船用電機負載一般為螺旋槳,其轉矩與轉速成平方關系,啟動時克服的負載轉矩小且允許轉子小范圍轉動,故可以采取開環啟動的方式簡化控制算法。
4 全速范圍復合控制
目前還很難得到一種全速范圍的高性能PMSM無傳感器控制方法,故通常選擇復合控制的方式。船舶電推系統對零低速區精度要求不高,一般可采用I/F控制,即轉速開環、電流閉環的方式直接啟動[38],若對零低速區精度要求較高,常用高頻電壓注入法;中高速范圍選用SMO、EKF、MRAS、Back EMF等方法。不同方案間需要平滑切換,確保切換區間的電機轉矩、轉速及電流不出現大的脈動。
有學者提出在切換時逐漸減小電流幅值的方法[39],根據轉矩—功角自平衡,電機為達到新的轉矩平衡,指令電流矢量與d軸的夾角會趨于零,這時再將中高速方案估算的位置信號切入;也有學者提出對兩種方案的估算角度通過線性加權[40]或引入滯環[41]的方式切換;還有學者利用高頻信號注入法構建誤差項對觀測器進行校正,將前者較高的穩態精度與后者較快的動態響應相結合。
5 總結
1)將PMSM無傳感器控制技術應用在船舶電力推進系統中,可以避免機械位置傳感器發生故障時電機的電流和轉矩等出現較大的脈動。但實際應用中需要精度高、動態響應快、調速范圍廣、啟動轉矩大、魯棒性和可靠性強的算法作為保障。
2)船舶電力推進系統對零低速性能要求不高,可利用I/F控制開環啟動簡化無傳感器控制算法;在某些對零低速較高的特殊場合,則可選用精度更高的信號注入方法,但高頻激勵會增加損耗、降低逆變器電壓利用率,還要處理復雜數字的信號,需要更優的信號處理算法來減少相位延遲和分離高頻響應,提高估算精度。
3)對于中高速段的無傳感器控制,采用各種基于電機基波模型的觀測器的閉環算法因精度高、魯棒性強成為主流,更強的自適應能力和更低的參數依賴性是其發展趨勢;開環算法雖然受參數影響精度不高,但其計算簡單、動態響應迅速仍有一定的改進空間和使用價值。
4)全速范圍復合控制需要可靠的銜接策略使切換過程平滑,避免電流、轉矩等出現較大脈動。
[1] 李永東, 朱昊. 永磁同步電機無速度傳感器控制綜述[J]. 電氣傳動, 2009, 39(09): 3-10.
[2] 劉計龍, 肖飛, 沈洋, 麥志勤, 李超然. 永磁同步電機無位置傳感器控制技術研究綜述[J]. 電工技術學報, 2017, 32(16): 76-88.
[3] 孫偉. 永磁同步電動機無位置傳感器控制與高性能運行策略的研究[D]. 浙江大學, 2017.
[4] 王子輝. 永磁同步電機全速度范圍無位置傳感器控制策略研究[D]. 浙江大學, 2012.
[5] 張越雷, 黃科元, 蔣智, 黃守道. 基于估算電流模型的永磁同步電機無速度傳感器控制[J].電工技術學報, 2016, 31(11): 68-74.
[6] Li Y, Zhu Z Q. Improved rotor position estimation in extended back-EMF based sensorless PM brushless AC drives with magnetic saliency[C]//International Electric Machines & Drives Conference, Antalya, Turkey, 2007: 214-219.
[7] 麥志勤, 劉計龍, 肖飛, 姚斌. 基于鎖相環的永磁同步電機無位置傳感器控制[J].電力電子技術, 2017, 51(07): 97-99.
[8] 張磊, 高春俠. 改進型永磁同步電機全速度范圍無傳感器控制策略[J]. 電機與控制學報, 2012, 16(07): 103-110.
[9] Liu J M, Zhu Z Q. Improved sensorless control of permanent-magnet synchronous machine based on third-harmonic back EMF[J]. IEEE Transactions on Industry Applications, 2014, 50(3): 1861-1870.
[10] Chen Z Q, Tomita M, Doki S, et al. An extended electromotive force model for sensorless control of interior permanent- magnet synchronous motors[J]. IEEE Transactions on Industrial Electronics, 2003, 50(2): 288-295.
[11] 李政, 胡廣大, 崔家瑞, 劉廣一. 永磁同步電機調速系統的積分型滑模變結構控制[J]. 中國電機工程學報, 2014, 34(03): 431-437.
[12] Kim H, Son J. A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J]. IEEE Transactions on Industrial Electronics, 2011, 58(9): 4069-4077.
[13] 涂志文, 蔣成明, 涂群章, 黃皓, 朱昌林. 基于改進型SMO的PMSM無傳感器控制方法[J]. 裝備制造技術, 2020(11): 12-17.
[14] Gao Peng, Zhang Guangming,Lv Xiaodong. Model-Free control using Improved smoothing extended state observer and super-twisting nonlinear sliding mode control for PMSM drives[J]. Energies, 2021, 14(4).
[15] 張曉光, 孫力, 陳小龍, 安群濤. 基于二階滑模觀測器的永磁同步電機無位置傳感器控制[J]. 電力自動化設備, 2013, 33(08): 36-41.
[16] 蘇健勇, 李鐵才, 楊貴杰. 基于四階混合滑模觀測器的永磁同步電機無位置傳感器控制[J]. 中國電機工程學報, 2009, 29(24): 98-103.
[17] 丁文, 梁得亮, 羅戰強. 兩級濾波滑模觀測器的永磁同步電機無位置傳感器控制[J]. 電機與控制學報, 2012, 16(11): 1-10.
[18] Qiao Z W, Shi T N. New sliding-mode observer for position sensorless control of permanent-magnet synchronous motor[J]. IEEE Transactions on Indu- strial Electronics, 2013, 60(2): 710-719.
[19] Quang N K, Hieu N T. FPGA-based sensorless PMSM speed control using reduced-order extended Kalman filters[J]. IEEE Transactions on Industrial Electronics, 2014, 61(12): 6574-6582.
[20] 張猛, 肖曦, 李永東. 基于擴展卡爾曼濾波器的永磁同步電機轉速和磁鏈觀測器[J].中國電機工程學報, 2007(36): 36-40.
[21] Antti P, Marko H. Adaptation of motor parameters in sensorless PMSM drives[J]. IEEE Transactions on Industry Applications, 2009, 45(1): 203-212.
[22] 林茂, 李穎暉, 吳辰, 袁國強, 李辰. 基于滑模模型參考自適應系統觀測器的永磁同步電機預測控制[J]. 電工技術學報, 2017, 32(06): 156-163.
[23] 李鴻儒, 顧樹生. 基于神經網絡的PMSM速度和位置自適應觀測器的設計[J].中國電機工程學報, 2002(12): 33-36.
[24] 諸德宏, 汪瑤, 周振飛. 基于模糊滑模算法的永磁同步電機無位置傳感器矢量控制[J]. 電機與控制應用, 2020, 47(08): 29-35.
[25] 郭磊, 楊中平, 林飛. 帶誤差補償的高頻信號注入永磁同步電機無傳感器控制策略[J]. 電工技術學報, 2019, 34(21): 4458-4466.
[26] 劉穎. 永磁同步電機脈振高頻信號注入無位置傳感器技術研究[D]. 南京航空航天大學, 2012.
[27] 李文真, 劉景林, 陳雙雙. 基于高頻方波信號注入法的永磁同步電機轉子位置檢測方法[J].電工技術學報, 2018, 33(24): 5821-5829.
[28] 吳春, 陳科, 南余榮, 魏春, 曾志成. 考慮交叉飽和效應的變角度方波電壓注入永磁同步電機無位置傳感器控制[J]. 電工技術學報, 2020, 35(22): 4678-4687.
[29] 劉計龍, 付康壯, 麥志勤, 肖飛, 張偉偉. 基于雙頻陷波器的改進型高頻脈振電壓注入無位置傳感器控制策略[J]. 中國電機工程學報, 2021, 41(02): 749-759.
[30] 劉兵, 周波. 脈振高頻電壓注入SPMSM無位置傳感器控制的估計誤差分析與抑制方法[J]. 中國電機工程學報, 2018, 38(14): 4232-4241+4329.
[31] 高宏偉, 于艷君, 柴鳳, 程樹康. 基于載波頻率成分法的內置式永磁同步電機無位置傳感器控制[J]. 中國電機工程學報, 2010, 30(18): 91-96.
[32] 于艷君. 基于載波頻率成份法的永磁同步電機無位置傳感器控制研究[D]. 哈爾濱工業大學, 2009.
[33] 朱熀秋, 成秋良. 無起動繞組永磁同步電機初始定位及起動策略[J]. 中國電機工程學報, 2008(09): 61-65.
[34] 梁艷, 李永東. 無傳感器永磁同步電機矢量控制中轉子初始位置的估算方法[J].電工技術雜志, 2003(02): 10-13.
[35] 韋鯤, 金辛海. 表面式永磁同步電機初始轉子位置估計技術[J]. 中國電機工程學報, 2006(22): 104-109.
[36] 賈洪平, 賀益康. 基于高頻注入法的永磁同步電動機轉子初始位置檢測研究[J].中國電機工程學報, 2007(15): 15-20.
[37] Silva C, Asher G M. Hybrid rotor position observer for wide speed-range sensorless PM motor drives including zero speed[J]. IEEE Transactions on Industrial Electronics, 2006, 53(2): 373-378.
[38] 劉計龍, 肖飛, 麥志勤, 高山, 余錫文. IF控制結合滑模觀測器的永磁同步電機無位置傳感器復合控制策略[J].電工技術學報, 2018, 33(04): 919-929.
[39] Jiang D., Lai R., Wang, F., Burgos, R., Boroyevich, D., Start-up transient improvement for sensorless control approach of PM motor[C], Applied Power Electronics Conference and Exposition, 2010: 408-413.
[40] 張海燕, 劉軍, 兗濤, 趙瑤瑤. 永磁同步電機在全速范圍內的無位置傳感器矢量控制[J]. 電機與控制應用, 2014, 41(07): 1-5.
[41] 曹虎, 魏雄, 汪志. 永磁同步電機無傳感器控制算法切換策略研究[J]. 電力電子技術, 2020, 54(06): 62-65.
Overview of Application of Sensorless Control of PMSM in Electric Propulsion
Deng Zhihao, Li Zhengguang, Zhu Houquan, Zhan Yusheng
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
TM341
A
1003-4862(2021)07-0049-07
2021-03-31
鄧智浩(1997-),碩士。研究方向:永磁同步電機控制。E-mail:1103642225@qq.com
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06