一種基于深度相機的非規則包裹體積計算方法
2021-07-20 04:20:51李永泮張維忠羅桂富
青島大學學報(工程技術版) 2021年2期
李永泮 張維忠 羅桂富
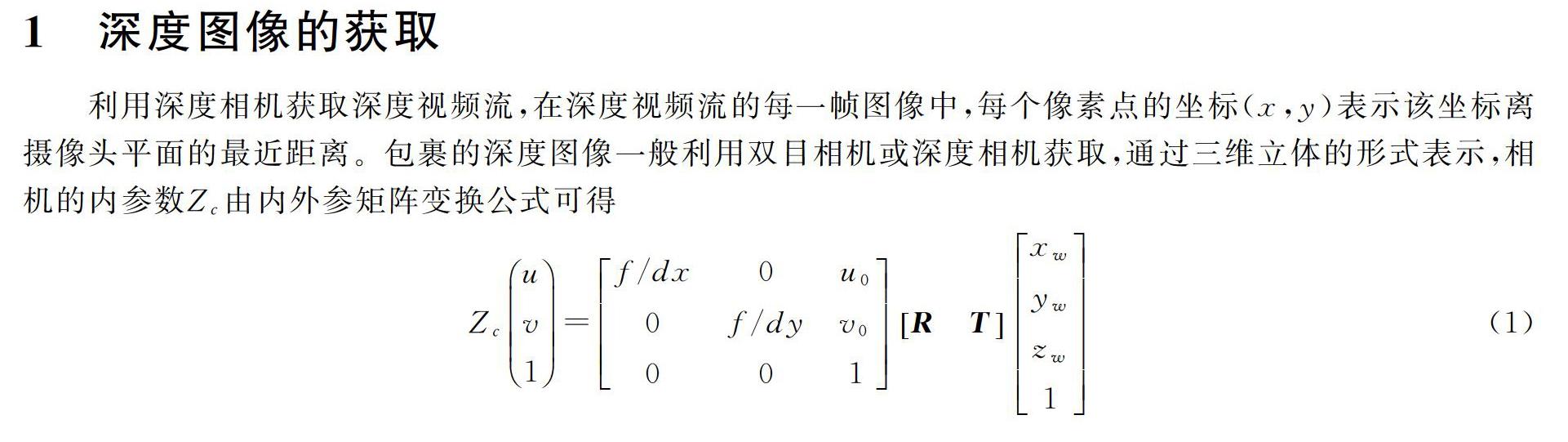
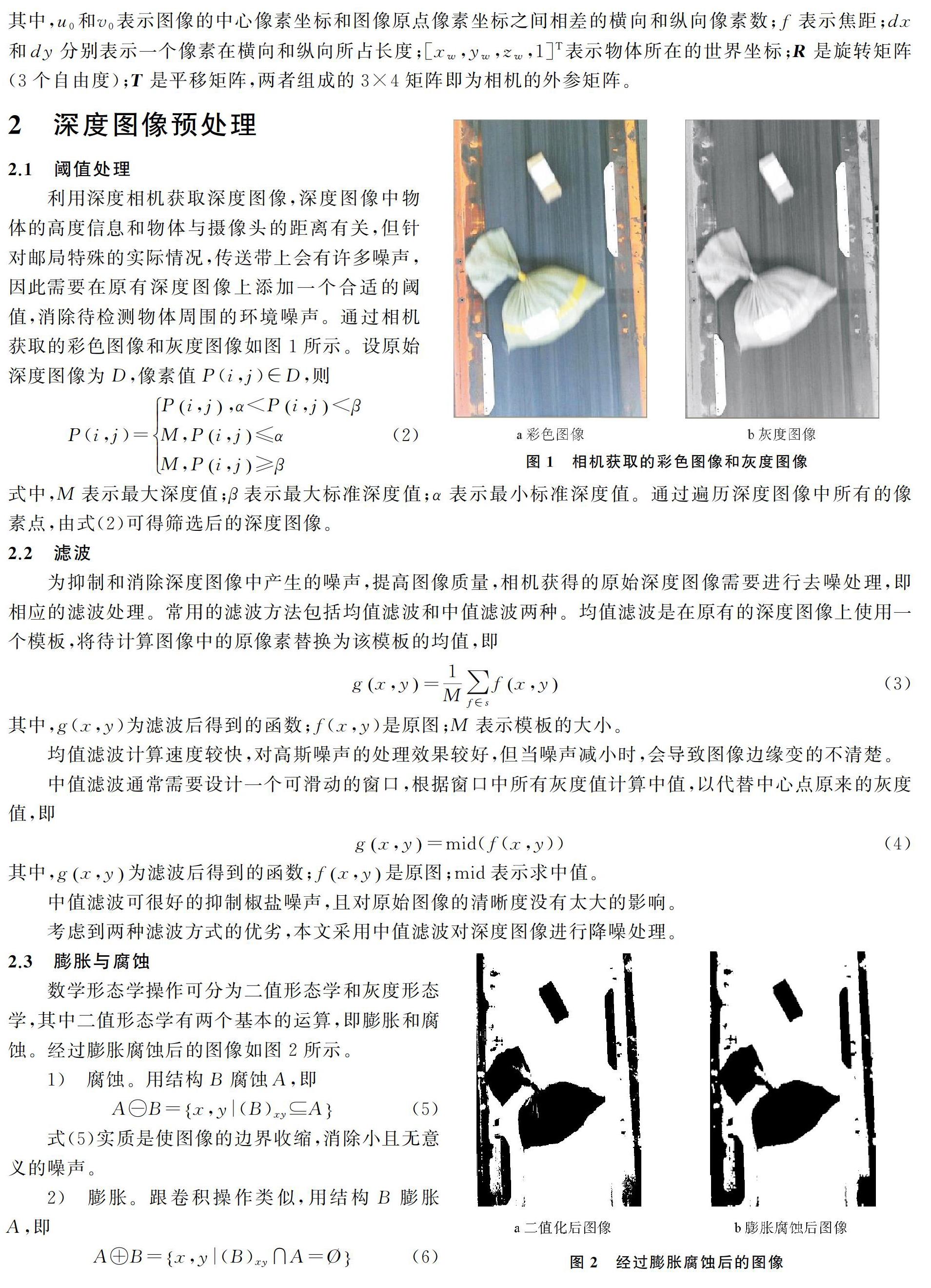
摘要: ?針對傳統的物體體積計算方法難以準確計算實際郵寄中非規則包裹(簡稱異形件)體積的問題,本文提出了一種新的基于深度相機的異形件體積計算方法。通過深度相機獲取深度圖像,利用計算機視覺中的膨脹及腐蝕等圖像處理方法對深度圖像進行形態學處理,去除實驗場景中存在的大量噪聲,利用體積與深度值的關系計算出包裹的體積,最后將該算法在青島郵區中心局及威海郵政進行大量的測試實驗。實驗結果表明,該算法的計算精度達97%以上,有效解決了郵局中大量異形件無法準確計算體積的問題,為計算貨車實際裝載率提供了重要的理論依據。該研究能夠滿足包裹實時精準的體積測量要求,具有一定的工程應用價值。
關鍵詞: ?深度相機; 深度圖像; 異形件; 體積計算
中圖分類號: TP391.41 文獻標識碼: A
3 體積計算
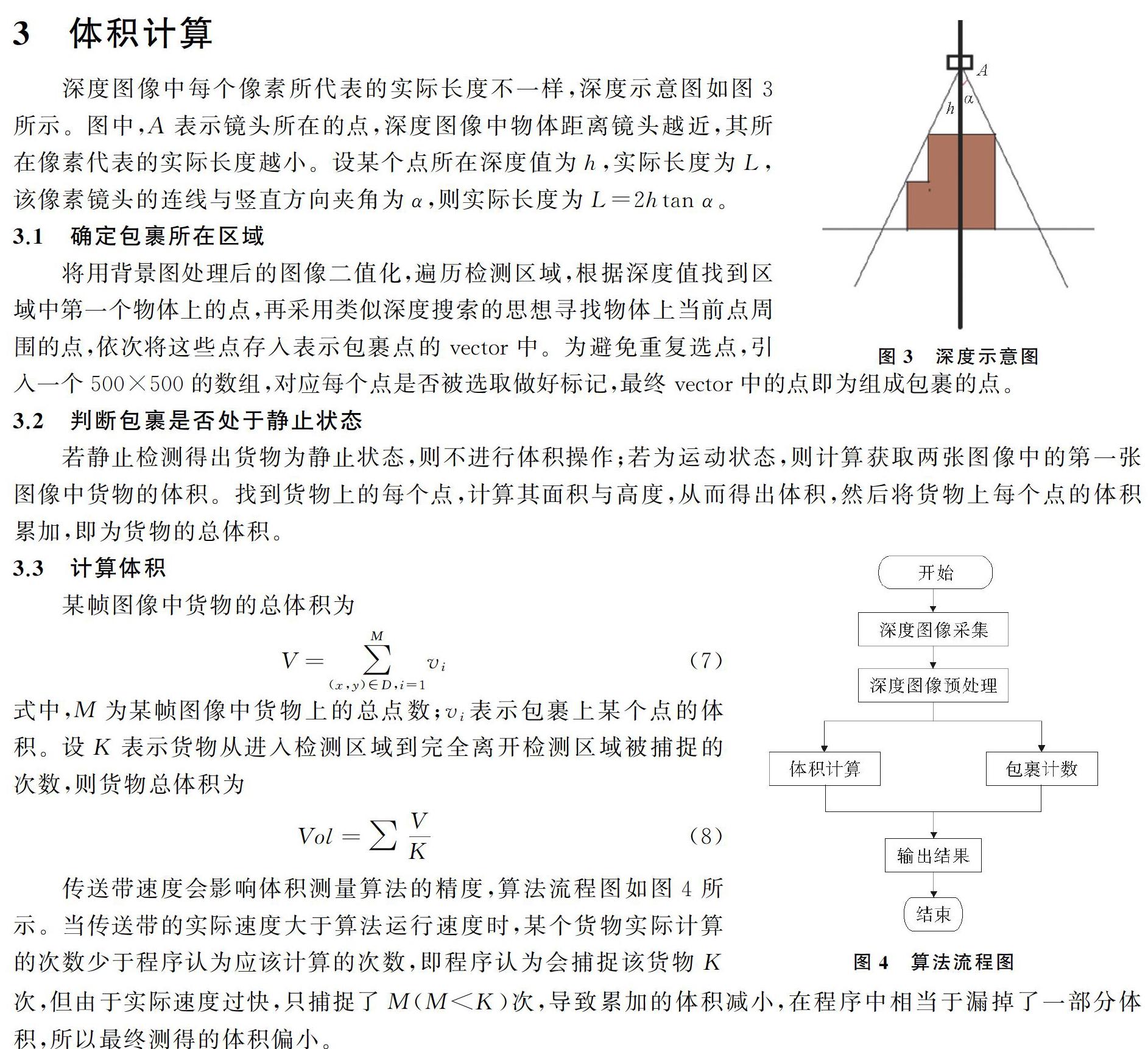
深度圖像中每個像素所代表的實際長度不一樣,深度示意圖如圖3所示。圖中,A表示鏡頭所在的點,深度圖像中物體距離鏡頭越近,其所在像素代表的實際長度越小。設某個點所在深度值為h,實際長度為L,該像素鏡頭的連線與豎直方向夾角為α,則實際長度為L=2htan α。
3.1 確定包裹所在區域
將用背景圖處理后的圖像二值化,遍歷檢測區域,根據深度值找到區域中第一個物體上的點,再采用類似深度搜索的思想尋找物體上當前點周圍的點,依次將這些點存入表示包裹點的vector中。為避免重復選點,引入一個500×500的數組,對應每個點是否被選取做好標記,最終vector中的點即為組成包裹的點。
3.2 判斷包裹是否處于靜止狀態
若靜止檢測得出貨物為靜止狀態,則不進行體積操作;若為運動狀態,則計算獲取兩張圖像中的第一張圖像中貨物的體積。找到貨物上的每個點,計算其面積與高度,從而得出體積,然后將貨物上每個點的體積累加,即為貨物的總體積。
傳送帶速度會影響體積測量算法的精度,算法流程圖如圖4所示。當傳送帶的實際速度大于算法運行速度時,某個貨物實際計算的次數少于程序認為應該計算的次數,即程序認為會捕捉該貨物K次,但由于實際速度過快,只捕捉了M(M 當傳送帶的實際速度小于算法運行速度時,某個貨物實際計算的次數多于程序認為應該計算的次數,即程序認為捕捉這個貨物K次,但由于實際速度過慢,包裹被捕捉到M(M>K)次,導致累加的體積增多,相當于重復計算了一部分體積,導致最終測得的體積偏大。特殊情況下,當貨物靜止不動時,程序會重復計算當前幀下的包裹體積,導致MK,因此計算得出的實際體積結果也會遠大于真實體積值。 4 結果與分析 將該算法應用于青島郵區中心局和威海郵政進行大量的實驗驗證。通過在郵局實地搭建深度相機,模擬郵局進行裝車時的場景,利用相機實時進行體積計算,實驗中包含大量規則包裹及異形件,數據樣本量充足。 首先對規則包裹進行模擬體積計算,規則包裹體積計算準確率如表1所示,表1中,準確率=(abs(包裹真實體積算法測量結果)/包裹真實體積)×100%, 然后模擬異形件體積計算。因為異形件的實際體積不方便測量,本文采用選取固定體積大小的籠箱(青島郵區中心局的籠箱容積是09 m3),把異形件裝在籠箱內,且盡量裝滿不留空隙,然后用算法計算該籠箱內全部包裹的總體積,以此作為算法準確率的依據。非規則包裹體積測量準確率如表2所示。由上述實驗結果可以看出,與傳統的物流包裹體積計算算法相比,本文提出的算法不僅對規則包裹的體積計算準確率較高,而且異形件體積的計算準確率也達97%以上。因此,該算法適用于郵局實際場景中各種情況下包裹的體積計算,擁有較好的魯棒性。 5 結束語 針對計算物體體積的傳統方法難以解決實際郵寄中非規則包裹(簡稱異形件)的體積計算問題,本文提出了一種新的基于深度相機的非規則包裹體積計算方法。該算法利用形態學處理去除噪聲,通過計算機視覺方法對包裹進行精準定位,并對包裹在深度圖像下每個像素點體積的累加得到總體積,最后在青島郵區中心局和威海郵政進行實驗驗證。實驗結果表明,該算法具有較高的準確率,滿足郵局對車輛裝載率精確計算的要求。該研究為智慧物流的建設提供了一種精準實時的體積計算手段,不僅能對規則包裹的準確率有很好的延伸,并且針對非規則包裹的體積計算提出了新的思路。下一步的研究重點是當若干包裹堆疊或包裹底部有空隙等情況的包裹體積計算問題。本算法還可結合動態秤及掃碼相機對每個包裹的信息準確匹配,從而實現包裹信息的統一化,便于郵局和用戶準確掌握包裹動向。 參考文獻: [1] 馮相如. 基于二維圖像規則物品體積計算方法研究[D]. 合肥: 中國科學技術大學, 2020. [2] 馮相如, 朱明. 基于單視圖3D重建的快遞紙箱體積測量算法[J]. 計算機系統應用, 2020, 29(10): 192198. [3] 邵寶峰. 基于點激光和雙目視覺的貨物尺寸測量的研究[D]. 大連: 大連理工大學, 2016. [4] 張巍, 楊忠根. 基于模型的單視圖線性自標定及三維重建算法[J]. 電腦知識與技術, 2008(15): 10651067. [5] 張葆成. 攝像機自標定及三維重建算法研究[D]. 上海: 上海海事大學, 2006. [6] 宓逸舟. 基于雙目視覺的快遞包裹體積計量系統[D]. 合肥: 合肥工業大學, 2017. [7] 劉翔. 多閾值OTSU快速算法的研究[D]. 長春: 吉林大學, 2017. [8] 王安, 王芳榮, 郭柏蒼, 等. 基于邊緣檢測的視差圖效果優化[J]. 計算機應用與軟件, 2019, 36(7): 236241. [9] 孫鵬, 馬鵬博, 郎宇博, 等. 結合SURF算法的雙目視覺測距方法[J]. 中國刑警學院學報, 2020(5): 110116. [10] 張志剛, 霍曉麗, 周冰. 基于雙目立體視覺的物流包裝箱尺寸測量研究[J]. 包裝工程, 2020, 41(19): 230236. [11] Chen C L Z, Wei J P, Peng C, et al. Improved saliency detection in RGBD images using twophase depth estimation and selective deep fusion[J]. ?IEEE Transactions on Image Processing, 2020, 29: 42964307. [12] Du Z C, Wu Z Y, Yang J G. Point cloud uncertainty analysis for laser radar measurement system based on error ellipsoid model[J]. Optics & Lasers in Engineering, 2016, 79: 7884. [13] 韓倩. 基于雙目視覺的攝像頭測距系統的設計與實現[D]. 石家莊: 河北科技大學, 2019. [14] 王玉偉, 尹顏朋. 基于RCF邊緣檢測和雙目視覺的箱體體積測量算法[J]. 現代計算機: 專業版, 2017(35): 7174. [15] 毛琳琳. 基于雙目立體視覺的大堆物料體積測量方法研究[D]. 杭州: 中國計量學院, 2015. [16] 劉星明, 劉曉利, 張平安, 等. 基于計算機視覺的三維重建技術研究[J]. 深圳信息職業技術學院學報, 2013, 11(3): 1319. [17] 呂聯林. 物流包裹動態測量與分揀系統[D]. 福州: 福州大學, 2018. [18] Hsueh J T, Lin C Y. Constructing a network model to rank the optimal strategy for implementing the sorting process in reverse logistics: case study of photovoltaic industry[J]. Clean Technologies and Environmental Policy, 2015, 17(1): 155174. [19] Wang X H, Li S, Chen C L Z, et al. Datalevel recombination and lightweight fusion scheme for RGBD salient object detection[J]. ?IEEE Transactions on Image Processing, 2020, 30: 458471. [20] 李文. 計算機視覺中運動目標檢測算法探究[J]. 數碼世界, 2019(6): 5051.
