基于攝影測量的起重機主梁變形檢測方法*
2021-07-21 13:03:36趙章焰魯恩順
起重運輸機械 2021年13期
趙章焰 朱 強 魯恩順
武漢理工大學物流工程學院 武漢 430063
0 引言
近年來,我國港口發展迅速,港口機械數量也逐漸增長,起重機的安全事故頻發。自2014年起,我國起重機械安全事故數量逐年遞增,2016年達到了94起,且死亡人數在特種設備安全事故總死亡人數中的比重也在不斷上升。因此,對起重機進行安全檢測勢在必行。主梁是門式起重機的主要承載構件,如果主梁發生嚴重變形后仍正常使用,不僅影響起重機的使用性能,更可能造成安全事故,所以需要重點檢測主梁的變形。
1 常用方法
常用的測量主梁變形的方法有拉鋼絲法、水準儀法和布設傳感器法。鋼絲法操作簡單,測量成本低,但測量結果會受到鋼絲繩自重影響。另外,鋼絲繩具有一定的彈性和韌性,彎曲后不易拉直,會造成較大誤差。水準儀法是將水準儀放在主梁端部調平,用鋼直尺置于待測位置進行測量。水準儀法測量快捷準確,但攜帶水準儀到主梁上不方便,且測量人員站在主梁上會使主梁變形,從而影響精度。此外,光線不足、距離較遠都會影響讀數,產生誤差。利用布設傳感器的方式進行測量,可取得精確、詳實的相關數據,但效率極低,往往需要相關設備停機1~2 d才能完成測量工作,且傳感器的安裝工序也十分復雜,由于港口環境較為惡劣,傳感器裸露在外,很難滿足長期穩定工作的要求。鑒于此,針對于起重機械的變形檢測,需要一種高效便捷的檢測方法。
2 攝影測量方法
2.1 求解外方位元素
攝影測量是一種非接觸式測量方法,僅需少量控制點和指針點的坐標信息即可通過拍照的方式獲取被測物體的三維坐標,從而得到尺寸信息。此方法在測量效率、實驗成本以及測量距離上均有優秀表現,隨著攝影測量技術和計算機視覺的發展,使用攝影測量技術來測量構件三維尺寸的方法在工程測量領域的應用越來越廣泛。
在進行攝影測量時,首先要求解相片的內外方位元素。內方位元素是指攝影過程中鏡頭中心相對于相片的位置關系參數,在相機標定檢校時即可確定。外方位元素是指相機在待測物體所在物方坐標系的位置參數T和姿態參數R,包括3個線元素X、Y、Z和3個角度參數ψ、ω、κ,求解原理可表示為
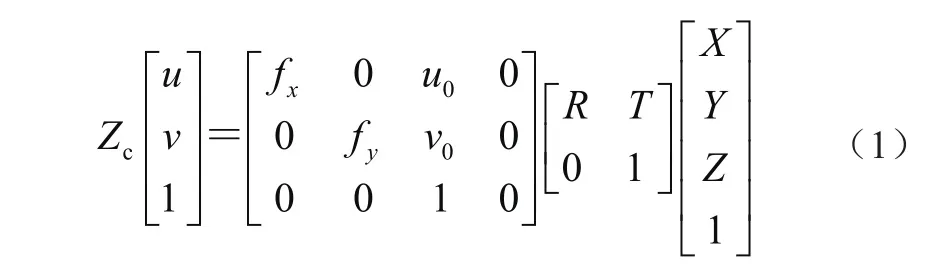

采用單像空間后方交會的方法,利用4個控制點的物方坐標、影像坐標和相機的相關參數,根據共線方程求出攝影中心的外方位元素。
2.2 雙目測距
3 實驗
3.1 實驗準備
本次實驗所選擇的相機為佳能EOS 5DS,分辨率8 688×5 792,搭配的鏡頭型號為EF 50 mm f/1.8 STM,所采用的相機標定方法是Matlab提供的Camera Calibrator工具箱,測量對象為門式起重機,試驗場環境見圖1。

圖1 試驗場環境
3.2 實驗流程
如圖2所示,在現場架設全站儀,獲取控制點的坐標信息,本文中所有點的坐標通過拓普康602G全站儀采集。該全站儀最遠有效測距為200 m,無外界干擾情況時的測量最大誤差為±(3+2×10-6D)㎜,充分滿足測量的工程要求。為保證數據的準確性,所有數據都進行3次獨立測量,試驗坐標取平均值。

圖2 數據采集所使用的全站儀
坐標信息采集完成后,通過相機對現場進行拍攝。分別拍攝起重機在吊載和空載狀況下的照片,每次拍攝從左方、右方兩個角度進行,左方、右方夾角為45°~60°。拍攝完成對試驗數據進行處理,在起重機上設置實驗點,將吊載和空載下的數據進行比較可得到主梁的變形量。控制點和指針點的選取如圖3所示,其物方坐標如表1所示。
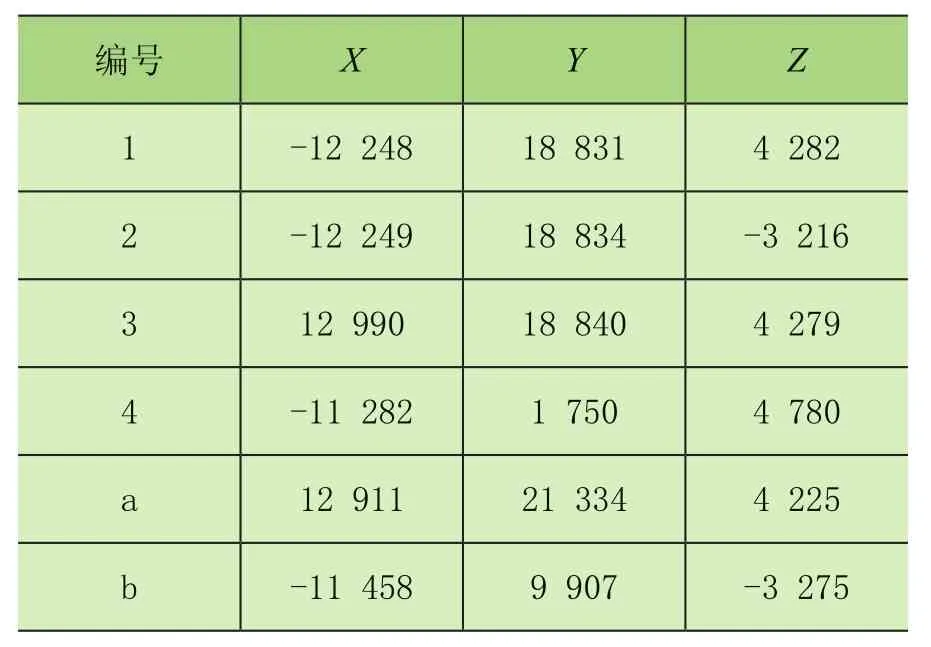
表1 起重機測量控制點、指針點物方坐標 mm
3.3 實驗結果
分別處理3組空載和吊載的實驗照片,人工選取各個測量過程中的左右照片中的控制點和指針點,利用后方交會解算外方位元素,取3次實驗的平均值作為最終結果,表2~表5為相機的外方位元素和試驗點物方坐標。

表2 空載測量外方位元素

表3 吊載測量外方位元素

表4 空載時試驗點物方坐標 mm

表5 吊載時試驗點物方坐標 mm
將得到的數據對比,發現X坐標和Z坐標的誤差在5 ㎝左右,進而說明測量精度的可靠性。以試驗點X坐標和吊載、空載Y坐標的差值為參數進行曲線擬合,得到圖4所示主梁變形曲線。

圖4 曲線擬合
4 結論
本文基于攝影測量設計了針對起重機主梁變形的測量方法,通過全站儀進行控制點和指針點的標定,解算出相機的外方位元素,然后通過人工選點進行關鍵點的測量,從而得到主梁的變形信息。相比于傳統的測量方法本文所述方法具有以下優勢:
1)非接觸測量方式,可排除接觸測量的人為等受力干擾,便于實現自動化;
2)操作簡單,實驗環境安全;
3)可同時測量多個目標,測量效率高;
4)除了測量主梁變形,也可通過設計專用算法,對其他參數進行實時監測。
目前,本文提出的方法仍然存在改進空間,受限于環境因素影響,相機采集的相片中同名點的自動匹配效果不佳,主要依賴于人工選擇。未來將探究自動匹配算法,提高測量精度的穩定性和測量過程的自動化程度。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
電測與儀表(2016年9期)2016-04-12 00:29:52