大視場低畸變的星敏感器光學系統設計*
2021-07-25 15:46:20謝運強劉春雨
機電工程技術 2021年6期
關鍵詞:設計
王 循,謝運強,劉春雨,解 鵬,劉 帥
(1.中國科學院長春光學精密機械與物理研究所,長春 130033;2.中國科學院大學,北京 100049)
0 引言
近年來,隨著科學技術在各個領域的發展,推進了航天事業的不斷進步。微納衛星作為一種創新型空間航天技術研究產物,其本身擁有體積小,重量輕且靈活性強等優勢,可滿足空間遙感、定位、圖像識別等多種需求,是未來空間航天技術領域的重要發展方向[1-3]。星敏感器通過光學遙感技術,探測宇宙天體中恒星發出的微弱信號,通過圖像處理等技術進而推測出微納衛星的飛行姿態信息,是微納衛星的重要組成部分[4-5]。
目前,星敏感器的重要研究方向在于增大相對孔徑和降低畸變。增大相對孔徑可使星敏感器中探測器獲得更多能量以探測到更多的導航星,降低畸變可提升星敏感器的成像質量,進而提高星敏感器的探測精度[6-7]。此外,由于微納衛星動輒批量化的需求,故星敏感器向低周期、低成本的方向發展[8]。目前在航天領域廣泛應用的星敏感器光學系統相對孔徑在1/1.6以上[9]。王虎等[10]設計的一種星敏感器,光學系統相對孔徑較大,為1/1.1,但該光學系統成像質量較差,無法滿足星敏感器要求。孟祥月等[11]設計的星敏感器光學系統具有較大的相對孔徑,為1/1.25,但該種光學系統畸變較大達到了0.05%,導致成像質量有所降低。杜康等[12]設計的星敏感器光學系統相對孔徑為1/1.3,畸變較小,為0.013%,具有很好的探測精度,但其采用了非球面設計,加工周期和成本成倍提高,無法滿足微納衛星快速生產及低成本的需求。
本文基于微納衛星對星敏感器的要求,設計了一種基于球面的星敏感器光學系統。該光學系統具有大視場角、大相對孔徑、寬光譜及低畸變的特性,可更好地保證星敏感器的探測精度,從而使微納衛星在軌時獲取更準確的飛行姿態信息。
1 光學系統參數
1.1 星敏感器要求及探測器選擇
在星敏感器中,最為重要的部分即為其光學系統,光學系統的優劣程度直接影響星敏感器能否滿足探測精度要求。而星敏感器中光學系統的各項參數,主要由探測星等級、探測星數量及所選探測器種類及參數等因素決定。本文根據星敏感器的實際需求,目標獲取較大的相對孔徑,選用效率和靈敏度較高的CMV300探測器。并對以上需求參數進行約束和統計,具體參數如表1所示。
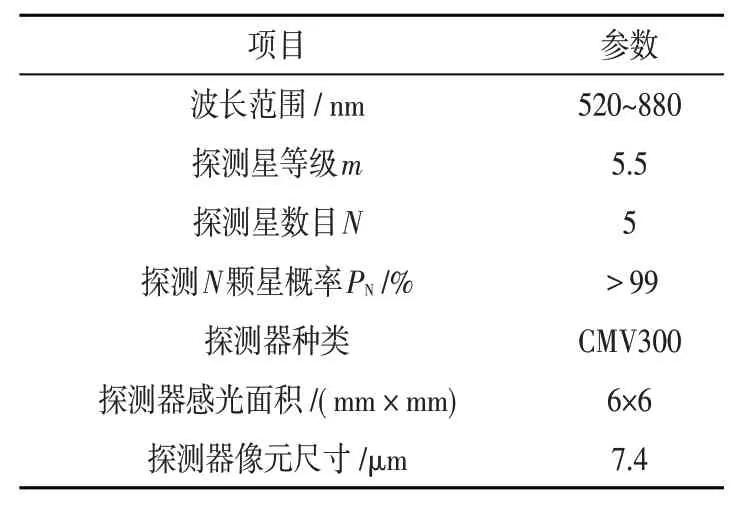
表1 星敏感器要求及探測器參數
1.2 視場角
通過表1可知,星敏感器要求設計的光學系統能夠使該星敏感器觀測5.5等星,觀測星數為5顆,且概率大于99%。通過天體恒星的分布規律,本文設計光學系統視場角參數計算滿足如下的泊松分布規律公式:
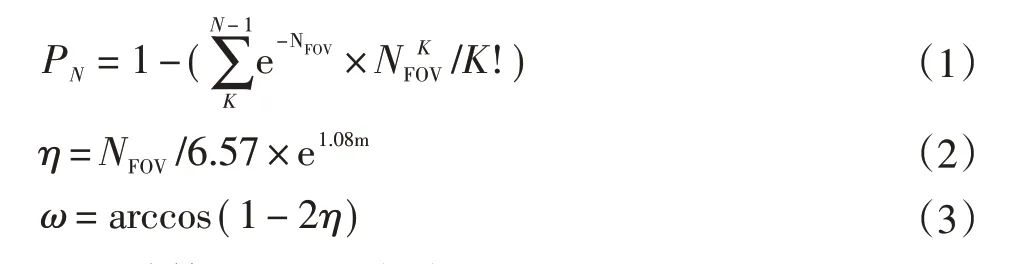
通過計算得出全視場角2ω=18°。
1.3 焦距
本文設計的光學系統焦距F,可通過1.2中計算所得的視場角2ω=18°以及探測器的對角線長度L確定,如下所示:

由表1可知,采用的探測器型號為CMV300,其感光面積為6 mm×6 mm。但是在實際加工裝配過程中,探測器可能出現遮攔等現象,感光面積無法完全利用,取其面積的90%作為實際感光面積,導出探測器對角線長度L=7.9 mm,進而可計算出焦距為F=25 mm。
1.4 相對孔徑
當星敏感器光學系統的焦距一定時,相對孔徑越大,進入探測器的能量越高,星敏感器探測恒星的概率就越高。相對孔徑為入瞳孔徑與焦距的比值,提高相對孔徑即為提高光學系統的入瞳孔徑。而光學系統的入瞳孔徑由探測器像元大小、探測器積分時間及信噪比等多因素決定。本次采用的CMV300型號探測器,像元尺寸為7.4μm,綜合星敏感器探測性能和測控指標要求,本次入瞳直徑D=16.7 mm,相對孔徑為1/1.49。
2 光學系統設計
2.1 初始結構選取
表2所示為本文設計的星敏感器光學系統參數,根據確定的光學系統參數,選取光學系統初始結構和優化方案。
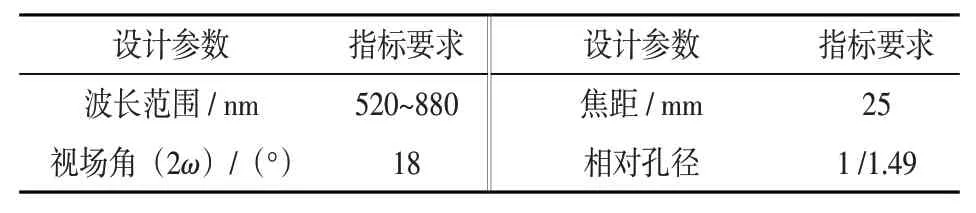
表2 星敏感器光學系統參數
目前,普遍應用的光學系統主要分為3個種類:反射式、折反射式以及折射式。其中,反射式光學系統無論是同軸反射式還是離軸反射式,均存在加工和裝配困難等情況,對于星敏感器的研制成本相對較高。而折反射式光學系統又存在中心遮攔等現象,能量利用率較低。故本文采用了結構上相對簡單且視場角較大的折射式光學系統,選取6片匹茲伐改進型物鏡作為初始結構,其具體結構及參數如圖1及表3所示。

表3 6片匹茲伐改進型物鏡參數表
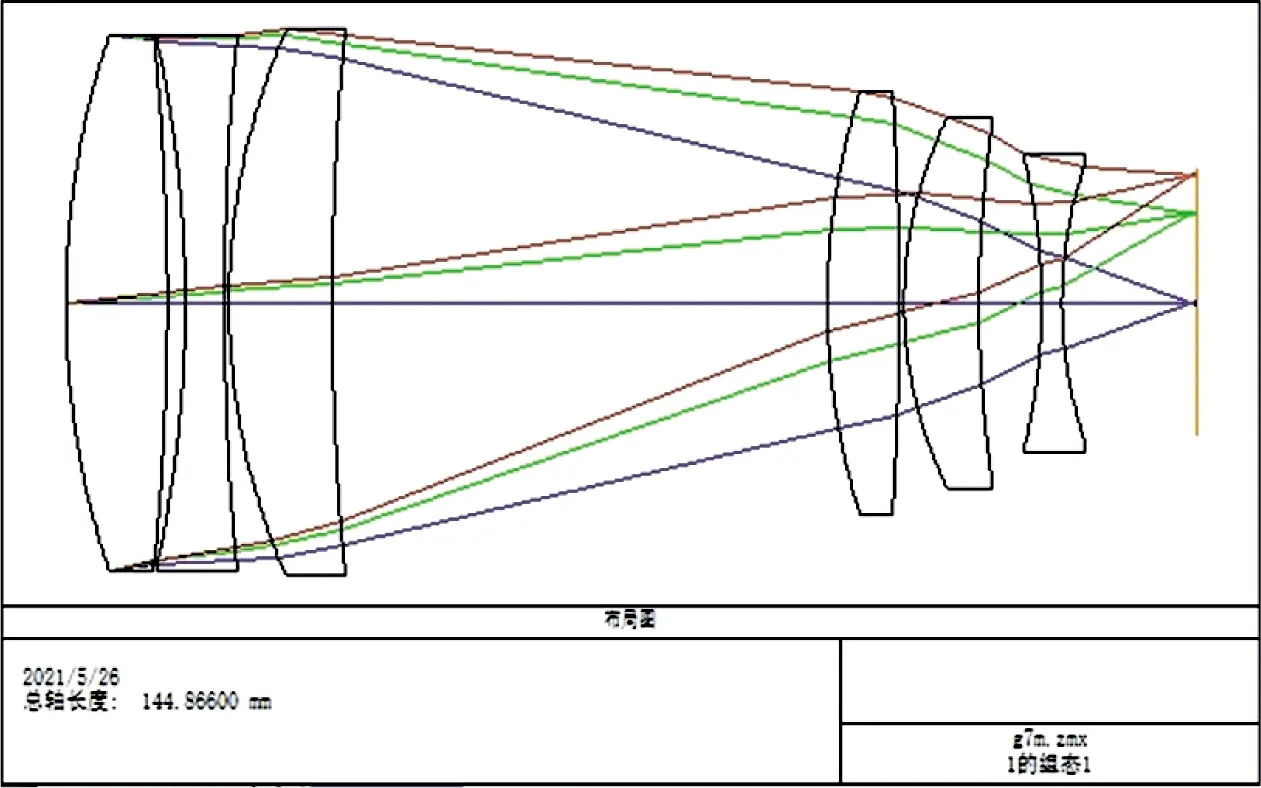
圖1 6片匹茲伐改進型物鏡結構
2.2 光學系統優化
選定初始結構后,需對整個光學系統進行優化處理。首先對初始結構的光學系統進行焦距縮放,使光學系統焦距滿足25 mm;然后根據星敏感器指標要求中其他參數,如波長范圍(520~880 nm)、視場角(18°)以及相對孔徑(1/1.49)作為光學系統的限定條件,對該光學系統進行進一步優化處理及計算;此外,為了考慮減少加工周期及成本等問題,采用的透鏡均采用球面加工,材料均采用國產透鏡材料。通過上述約束條件,基于選定的6片型匹茲伐物鏡初始結構進行優化,以滿足星敏感器精度及制造的要求。
2.3 設計結果
該光學系統基于室溫20℃進行優化設計,優化后的光學系統結構及詳細參數如圖2及表4所示。該光學系統仍保留6片透鏡數量,無膠合透鏡,且透鏡均采用國產材料和球面加工。優化后的光學系統總長僅為37.9 mm,滿足微納衛星中星敏感器小型化及輕量化的要求。
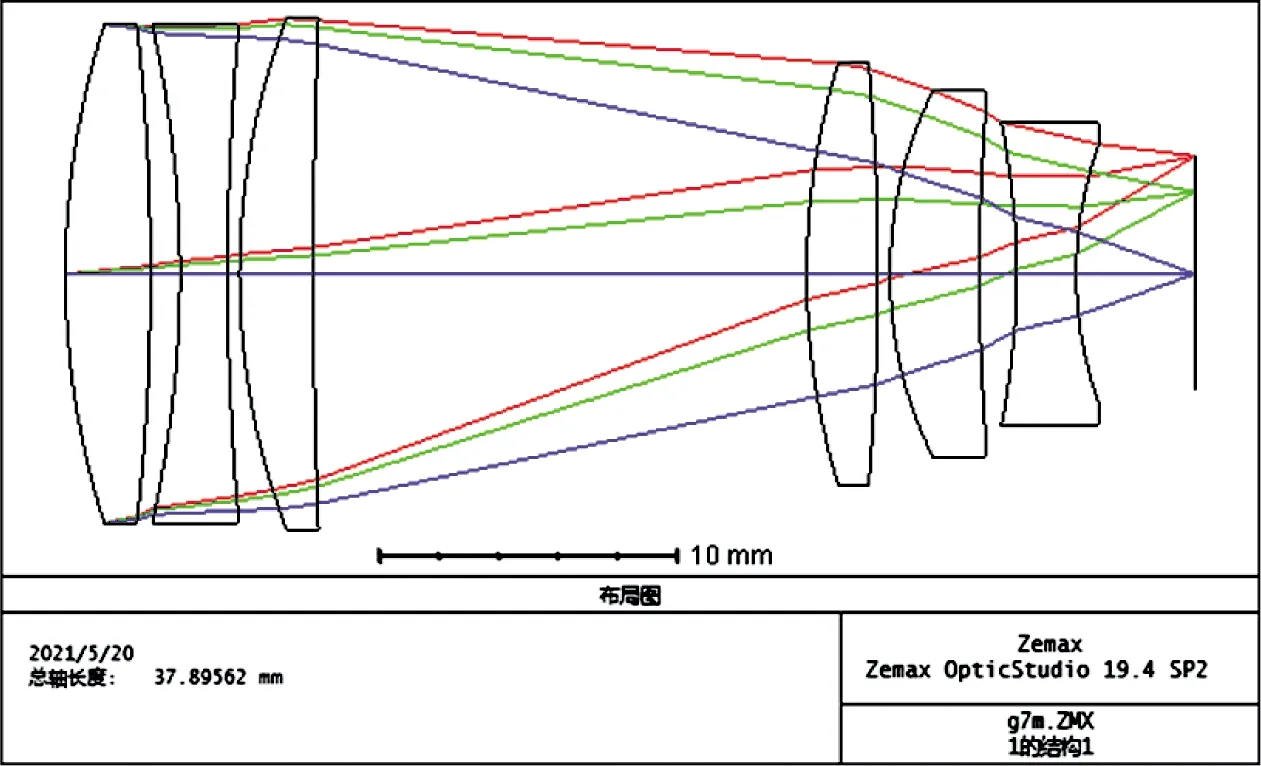
圖2 優化后光學系統結構
表4 優化后光學系統參數及材料
3 成像質量評價
根據星敏感器的實際使用需求,通過約束波長范圍、視場角、焦距及相對孔徑,設計并優化了該星敏感器的光學系統。該光學系統總長為37.9 mm,后截距為4 mm,整體尺寸較小,滿足微納衛星中星敏感器小型化要求。通過獲取該光學系統點列圖、系統場曲及畸變、能量集中度和倍率色差等參數,進而評價所設計的星敏感器光學系統的成像質量。
3.1 點列圖
星敏感器工作時,探測到的恒星在星敏感器的探測器上的像形成的彌散斑近似為一個圓點形狀,彌散斑的偏差越小,星敏感器探測精度越高。圖3所示為設計的光學系統0°、6.3°及9°視場的點列圖,該點列圖可表示星敏感器的彌散斑成像情況。由圖中RMS半徑可知,各個視場角的彌散斑均方根半徑均小于5μm,表明該光學系統可很好地滿足探測恒星的精度要求。此外,通過成像的點列圖可知,在整個視場內,彌散斑形狀均可近似成較好的圓形,且彌散斑大小基本保持均勻一致,表明該光學系統成像均勻,質量較好。
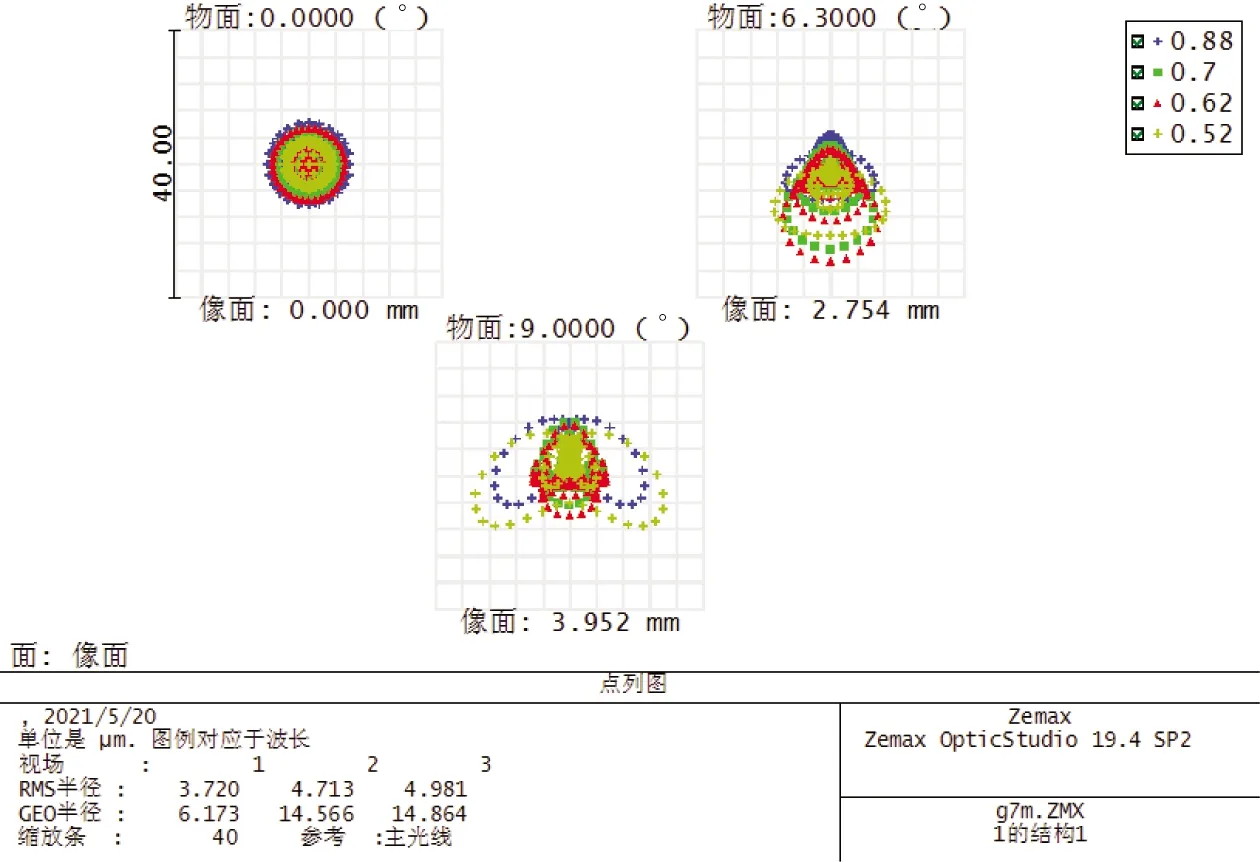
圖3 光學系統點列圖
3.2 系統場曲及畸變
光學系統發生的畸變可能造成所成的像失去幾何對稱度,直接影響星敏感器的探測精度,故畸變率是評定光學系統成像質量的重要指標。根據星敏感器要求,光學系統的畸變率應小于0.5%,圖4所示為光學系統場曲及畸變,由圖可知可知該光學系統場曲小于或等于0.05 mm,畸變率小于或等于0.12%,具有極低的畸變率,可更有效地降低星敏感器測試角度的誤差,提升星敏感器的探測精度。
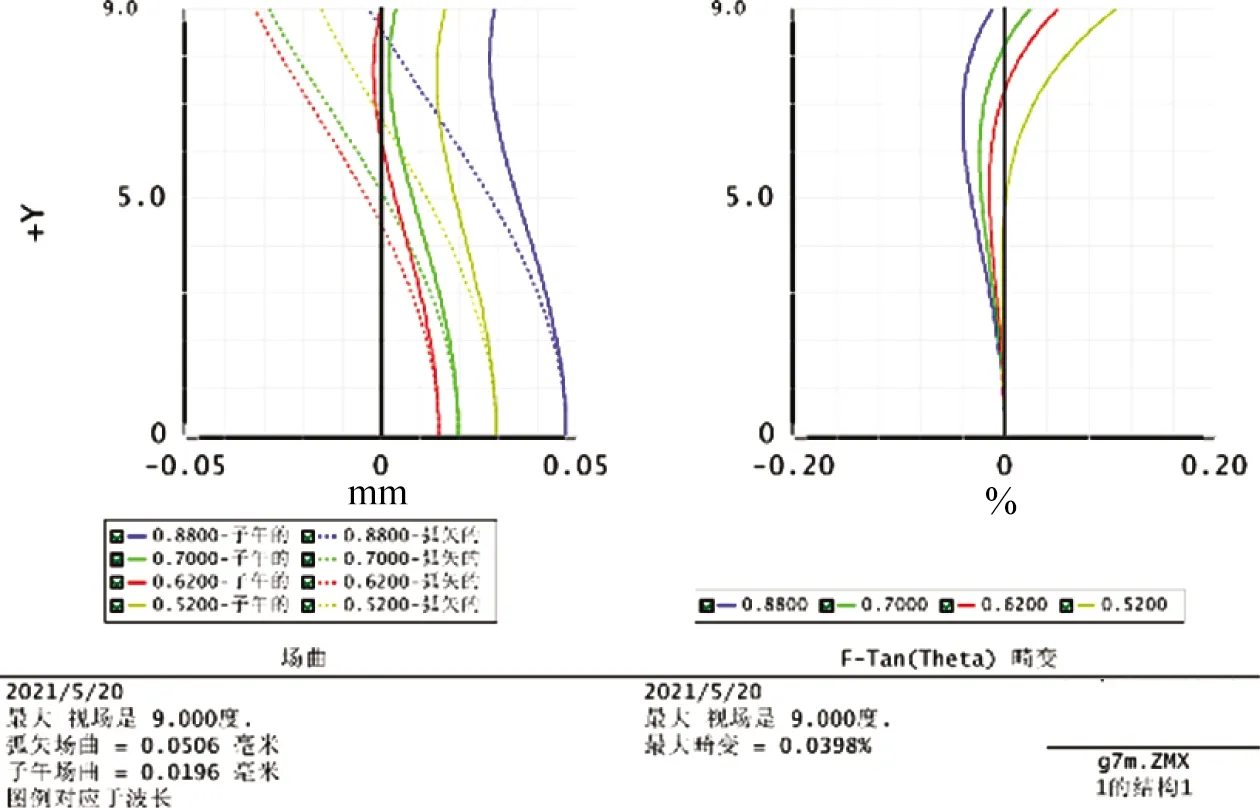
圖4 光學系統場曲及畸變
3.3 能量集中度
光學系統的能量集中度表示距離質心一定半徑范圍內能量分布的比例,也是評價光學系統成像質量的重要指標。在有限半徑范圍內能量集中度越高,表明成像質量越好。圖5所示為光學系統能量集中度曲線,可知在2×2像元尺寸半徑范圍內,各個視場角度能量集中度較高,均保持在90%以上,有利于提升星敏感器探測恒星的準確度,滿足設計要求。

圖5 光學系統能量集中度
3.4 倍率色差
倍率色差可以表示光學系統中不同波長的光斑偏離程度,也是評價光學系統成像質量的重要指標。圖6所示為最大視場下垂軸倍率色差曲線,可知設計的光學系統倍率色差分布于兩側艾里斑曲線內。表明該光學系統不同位置所成像質量保持一致,具有良好的色差矯正,可有利于提升星敏感器探測精度。

圖6 光學系統倍率色差
4 公差分析
星敏感器光學系統中各組件在加工及裝配等環節,均會產生誤差,進而影響光學系統的成像質量,故需對該光學系統進行合理的公差配置。利用Zemax軟件中的公差分析功能對光學系統進行分析,分析結果如表5所示。再通過利用蒙特卡洛分析法,對光學系統進行隨機誤差分析,結果如表6所示。
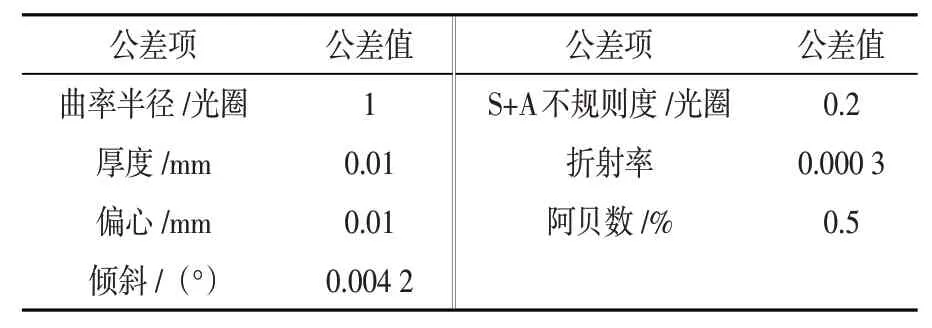
表5 光學系統公差分配表
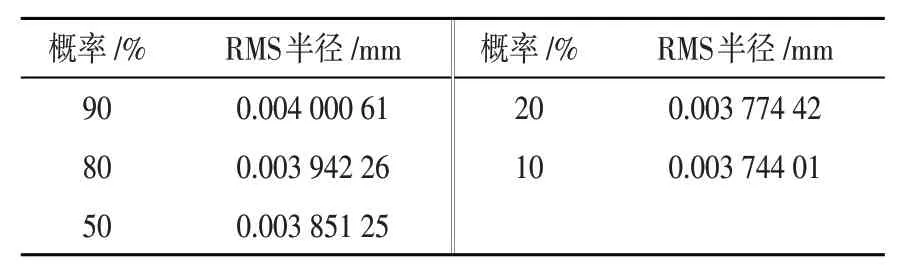
表6 蒙特卡洛分析結果
5 結束語
本文設計了一種基于球面的星敏感器光學系統,該光學系統具有較大的光譜范圍(520~880 nm),較大的視場角(18°)以及較大的相對孔徑(1/1.49)。光學系統根據6片匹茲伐改進型物鏡作為初始結構并進行優化處理,均使用國產透鏡材料,并采用球面加工,降低了加工周期及成本。光學系統焦距為25 mm,后截距為4 mm,系統總長僅為37.9 mm,滿足星敏感器小型化需求。在光學系統成像質量上,彌散斑呈圓形且大小保持一致,成像均勻。且該光學系統擁有極低的畸變率(小于或等于0.12%),可有效地減小星敏感器的測角誤差。此外在2×2像元尺寸半徑范圍內,各個視場角度能量集中度保持在90%以上,探測恒星準確度較高,且具有良好的色差校正。故該光學系統設計合理,可滿足微納衛星對星敏感器的要求及發展需要。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04