PID控制在不壓井作業(yè)機舉升液壓控制系統(tǒng)上的應用
2021-07-25 05:30:38陳歡朱凱輝
科技創(chuàng)新導報 2021年6期
陳歡 朱凱輝

摘? 要:舉升液壓控制系統(tǒng)是不壓井作業(yè)機液壓控制系統(tǒng)的關鍵控制環(huán)節(jié),決定著作業(yè)機的作業(yè)效率。在一般工程應用中,舉升控制存在著控制穩(wěn)定性差,管柱在大負載情況下會產(chǎn)生沖擊等現(xiàn)象。本文在電液伺服液壓控制的基礎上引入閉環(huán)PID控制系統(tǒng),實現(xiàn)了作業(yè)過程中對管柱位置的實時控制,同時也降低了管柱的沖擊、震動現(xiàn)象。
關鍵詞:不壓井作業(yè)機? 液壓控制系統(tǒng)? PID? 管柱
中圖分類號:TH137 ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? ? ? ? 文章編號:1674-098X(2021)02(c)-0070-04
The Application of PID Control in the Lifting Hydraulic Control System of Snubbing Operation Machine
CHEN Huan*? ZHU Kaihui
(School of Mechanical Engineering, Yangtze University, Jingzhou, Hubei Province,434023 China)
Abstract: The lifting hydraulic control system is the key control link of the hydraulic control system of the snubbing operation machine, which determines the operation efficiency of the operation machine. In general engineering applications, the lift control has poor control stability, and the pipe string will produce shocks under heavy loads. In this paper, a closed-loop PID control system is introduced on the basis of electro-hydraulic servo-hydraulic control, which realizes real-time control of the position of the pipe string during operation, and also reduces the impact and vibration of the pipe string.
Key Words: Snubbing operation machine; Hydraulic control system; PID; Pipe string
不壓井作業(yè)技術是一項能夠在工程作業(yè)過程中保護油、氣產(chǎn)層的同時提高油、氣生產(chǎn)效率的新技術,被廣泛運用于石油行業(yè)中,因此,優(yōu)化提升不壓井作業(yè)機液壓控制系統(tǒng)成為當前的一項重要技術難關[1]。針對當前不壓井作業(yè)機舉升液壓控制系統(tǒng)存在的管線抖動,控制系統(tǒng)不穩(wěn)定等現(xiàn)象,采用PID控制接入電液比例伺服控制系統(tǒng)中使系統(tǒng)實現(xiàn)閉環(huán)控制。液壓控制系統(tǒng)能實時調(diào)控管柱的位置、起升下放的速度、加速度,減小大載荷下管柱產(chǎn)生的抖動。該控制系統(tǒng)具有操作簡單、可靠性高、工作效率高、穩(wěn)定性高等優(yōu)點,對不壓井作業(yè)機的舉升液壓控制系統(tǒng)的研究具有重大意義[2]。
1? 新型不壓井作業(yè)機
1.1 新型不壓井作業(yè)機舉升系統(tǒng)結構
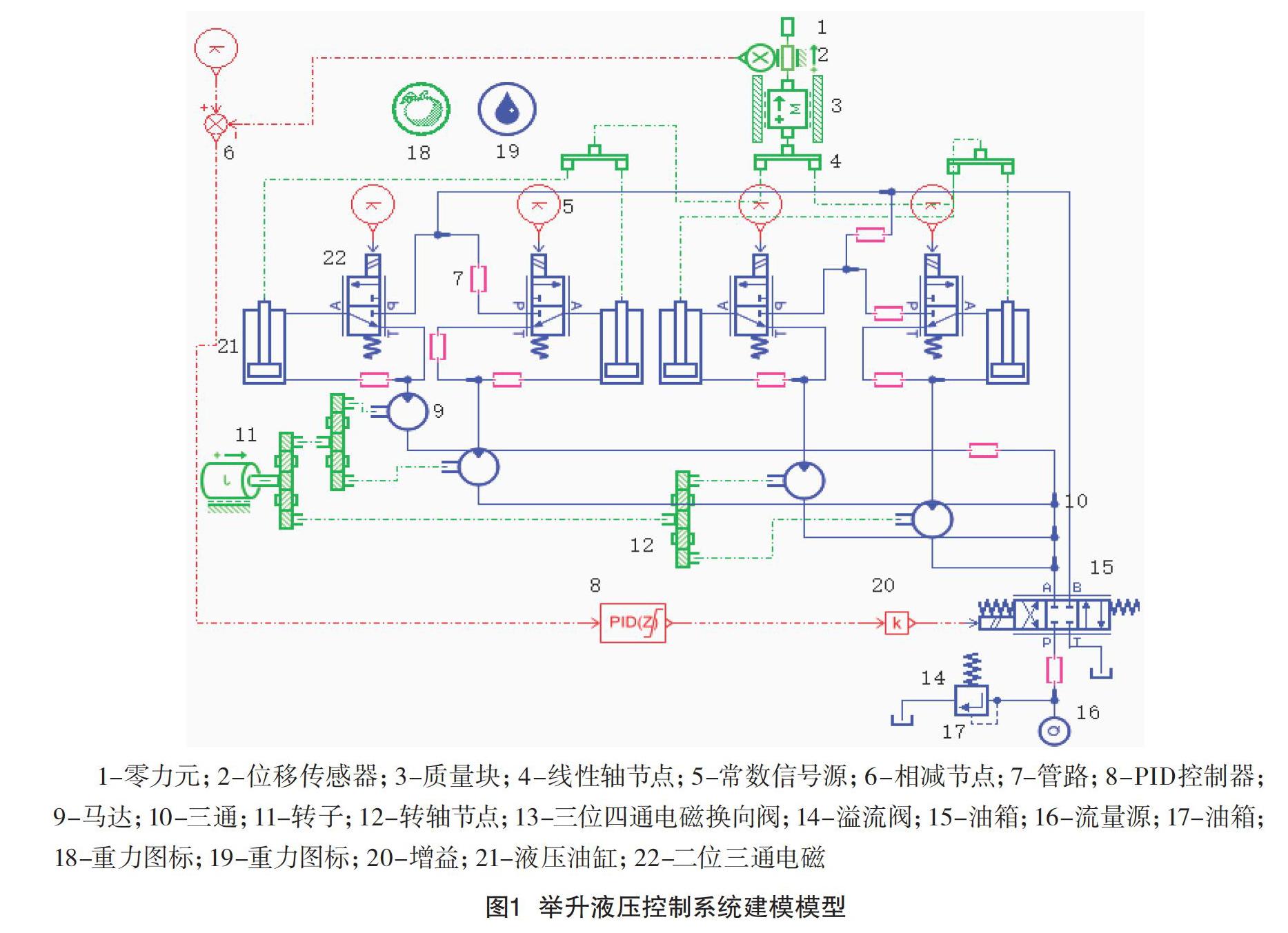
如圖1,新型不壓井作業(yè)機舉升液壓控制系統(tǒng)主要由舉升機、轉盤、固定卡瓦、游動承重卡瓦、游動防頂卡瓦、旋轉卡瓦、底座及支撐架構成。舉升機帶轉盤、游動承重卡瓦、游動防頂卡瓦(如有需要)一起上行、下行。轉盤位于移動面板上部,與移動承重卡瓦和移動防頂卡瓦相連,轉盤在旋轉過程中可以承受載荷,一般采用液壓馬達驅動,齒輪傳動或鏈條傳動。固定卡瓦安裝在支撐架上,一般有2個或者3個,用于卡緊管柱。游動卡瓦有2個,包括移動承重卡瓦和移動防頂卡瓦,用于起下油管。旋轉卡瓦主要是在管柱下放過程中配合管柱實現(xiàn)管柱的旋轉[3]。
1.2 舉升系統(tǒng)工作原理
不壓井作業(yè)機的作業(yè)工況主要分為管柱起升和管柱下放兩種工況。管柱起升作業(yè)前,舉升機液缸處于壓縮狀態(tài),固定卡瓦卡緊管柱。開始起升作業(yè)時,即當油管全部位于井筒中時,油管豎直方向的合力向下處于“管重的“狀態(tài)。隨著管柱的起升,油管豎直方向向下的合力逐漸減小最終變?yōu)?,此時油管受力達到靜平衡狀態(tài)。再對油管進行起升作業(yè)時,油管所受的合力向上,處于”管輕“狀態(tài)。以油管上行為例講述起升液壓控制系統(tǒng)的工作原理。管柱起升作業(yè)前,起升液壓控制系統(tǒng)的油缸處于低位壓縮狀態(tài),固定卡瓦卡緊管柱。起升作業(yè)時,下端固定卡瓦松開,游動卡瓦抱緊管柱。通過操作平臺的控制面板對起升液壓控制系統(tǒng)的三位四通電磁換向閥輸入控制信號,電磁鐵將閥芯吸到左位,左位通電,換向閥執(zhí)行左位機能,液壓油壓入油缸無桿腔,活塞上行驅動舉升機上行。舉升機帶動游動卡瓦卡住油管上行,使油管上行。當控制系統(tǒng)的傳感器檢測到接箍信號時,反饋信號使換向閥斷電切換到中位,執(zhí)行0位機能,斷開供油回路。待接箍頭通過,換向閥左位通電使得管柱繼續(xù)上行,當達到PID期望信號時,即活塞達到指定位移,游動卡瓦松開,上端固定卡瓦抱緊管柱,控制信號讓換向閥執(zhí)行右位機能,此時液壓缸空載回復,恢復至壓縮低位,重復之前操作,直到完成一根油管的起升[4-6]。
2? PID位置控制
PID是比例、積分、微分控制的簡稱,通過比例、積分的環(huán)節(jié)的調(diào)控控制油缸速度,并對控制對象的結果作一個負反饋。整個控制流程是PID控制函數(shù)與被控對象油缸的傳遞函數(shù)、一個負反饋結合完成的,保證控制對象的傳遞函數(shù)與負反饋結合的閉環(huán)系統(tǒng)能夠在最短的時間內(nèi)達到給定的期望[7]。
3? AMEsim仿真
3.1 仿真參數(shù)與建模
如表1所示。
3.2 仿真結果分析
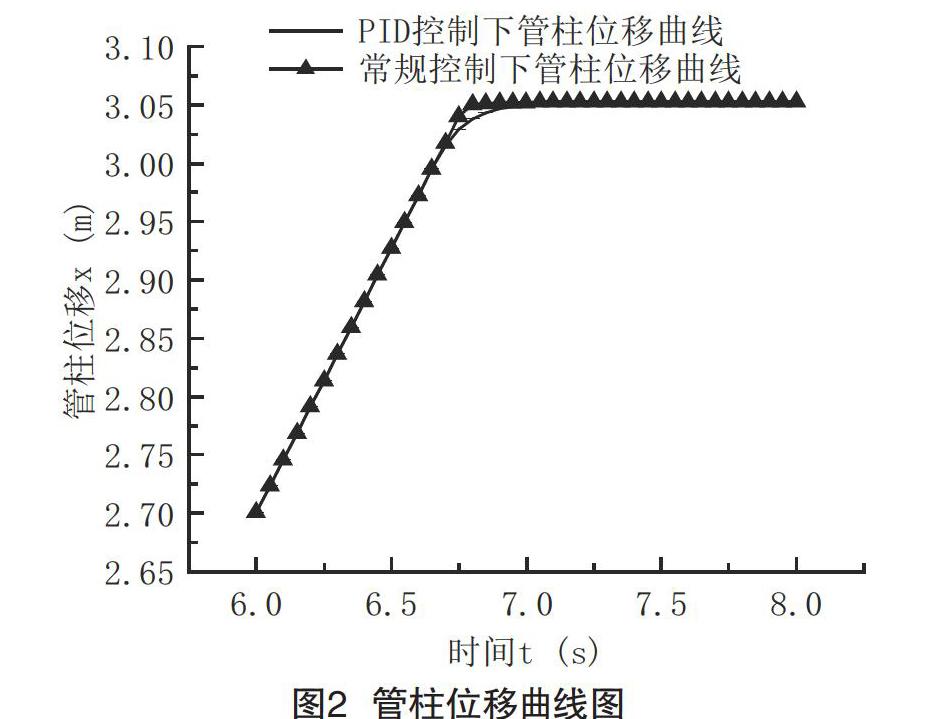
通過圖2和圖3管柱提升曲線中,我們可知PID控制能夠實時調(diào)控管柱的速度、位移。開環(huán)控制下管柱位移曲線表現(xiàn)為勻速直線上升,速度曲線表現(xiàn)為加速、勻速、減速,在接近3.05m處管柱速度會產(chǎn)生波動,即有明顯的沖擊現(xiàn)象。在PID閉環(huán)控制系統(tǒng)中,管柱在接近3.05m處會有一段緩慢的減速過程,降低管柱所產(chǎn)生的震動,提升了管柱運動的平穩(wěn)性。
通過圖4和圖5的油缸進口壓力、流量曲線,更好地反映出閉環(huán)PID控制與傳統(tǒng)開環(huán)控制的區(qū)別。開環(huán)控制下油缸進口的油壓在到達油缸行程終點時,油缸內(nèi)的壓力會急劇上升,不具備回油功能,油缸進油口流量會產(chǎn)生不穩(wěn)定波動。而閉環(huán)PID控制下,油缸具備較好的回油功能,壓力到達2.5MPa后降低至初始壓力,且流量曲線呈勻速下降,無波動現(xiàn)象。
4? 結語
(1)提供了一種新型不壓井作業(yè)機起升液壓控制系統(tǒng)的設計方法。
(2)在PID閉環(huán)控制方法下,油缸壓力減小,管柱運動起點與終點的位置得到實時的控制,顯著減小了舉升液壓控制系統(tǒng)在工程作業(yè)過程中所遇到的管柱震動、沖擊現(xiàn)象。降低了事故發(fā)生的概率,對不壓井作業(yè)機的起升控制系統(tǒng)的研究具有指導意義。
參考文獻
[1] 梅雪松.基于PLC的不壓井作業(yè)機液壓控制系統(tǒng)特性研究[D].荊州:長江大學,2018.
[2] 羅娜娜.基于非線性PID控制的挖掘機液壓系統(tǒng)穩(wěn)定性研究[J].中國工程機械學報,2019,17(4):367-370.
[3] 孫新.節(jié)能型起升機構閉式液壓系統(tǒng)研究[D].大連:大連理工大學,2019.
[4] 于大偉.新型獨立式帶壓作業(yè)設備的研發(fā)與應用[J].油氣開發(fā)工程,2017,45(5):103-106.
[5] 邾啟孟.新型帶壓作業(yè)設備平衡絞車研制與應用[J].裝備制造技術,2016(9):101-114.
[6] 劉濤.不壓井修井機控制[D].成都:西南石油大學,2012.
[7] 呂衛(wèi)強.液壓缸位置伺服系統(tǒng)模糊PID控制[J].兵工自動化,2020,39(9):41-44.
