基于資源約束的多無(wú)人機(jī)聯(lián)盟的任務(wù)分配
2021-07-26 08:13:32王輝,劉爽
關(guān)鍵詞:資源實(shí)驗(yàn)
王 輝, 劉 爽
(華東理工大學(xué)機(jī)械與動(dòng)力工程學(xué)院,上海 200237)
近些年,多無(wú)人機(jī)(Multi Unmanned Aerial Vehicles, 簡(jiǎn)稱(chēng)Multi-UAV)任務(wù)分配問(wèn)題受到人們的廣泛關(guān)注,旨在將無(wú)人機(jī)分組,組成聯(lián)盟,從而更高效快捷地完成任務(wù)。資源分配是為了完成目標(biāo)任務(wù),確定無(wú)人機(jī)擁有的資源數(shù)量。隨著控制技術(shù)、通訊技術(shù)、傳感器技術(shù)和智能調(diào)度技術(shù)的快速發(fā)展[1-3],任務(wù)分配問(wèn)題已廣泛應(yīng)用于生產(chǎn)規(guī)劃、貨物運(yùn)輸和工作安排等,而多無(wú)人機(jī)任務(wù)分配更是廣泛應(yīng)用于軍事、農(nóng)業(yè)、服務(wù)業(yè)等領(lǐng)域。由于單個(gè)無(wú)人機(jī)資源有限,很難完成現(xiàn)實(shí)中復(fù)雜多變的任務(wù),因此為了更有效地解決軍事上的復(fù)雜問(wèn)題,應(yīng)采用多無(wú)人機(jī)聯(lián)盟。
國(guó)內(nèi)外的學(xué)者對(duì)任務(wù)分配問(wèn)題已進(jìn)行了大量的研究。Chopra 等[4]提出了匈牙利方法的分布式來(lái)解決任務(wù)分配問(wèn)題。在多無(wú)人機(jī)應(yīng)用的情況下,所有無(wú)人機(jī)協(xié)同計(jì)算共同分配,在對(duì)等網(wǎng)絡(luò)進(jìn)行有限局部計(jì)算。Lee[5]提出了一種基于市場(chǎng)機(jī)制的拍賣(mài)算法,在執(zhí)行任務(wù)期間,無(wú)人機(jī)會(huì)不斷消耗其資源,這些資源必須在運(yùn)行期間重新填充。在該算法中,考慮了無(wú)人機(jī)的資源,從而也產(chǎn)生相應(yīng)的成本。Jiao 等[6]提出了基于拍賣(mài)的市場(chǎng)模型,有效地最大化區(qū)塊鏈網(wǎng)絡(luò)的社會(huì)福利,并為云/霧計(jì)算服務(wù)供應(yīng)商提供有效的策略。Kurd 等[7]提出了一種新的自主生物啟發(fā)方法,在執(zhí)行任務(wù)期間,利用該方法對(duì)多個(gè)無(wú)人機(jī)進(jìn)行高效分配。每個(gè)無(wú)人機(jī)根據(jù)與各個(gè)無(wú)人機(jī)運(yùn)行狀態(tài)和任務(wù)參數(shù)有關(guān)的標(biāo)準(zhǔn)動(dòng)態(tài)調(diào)整任務(wù)分配,而不參與任務(wù)的無(wú)人機(jī)之間可以進(jìn)行直接通信。Fang 等[8]提出了一種基于情緒傳染(PTA-EC)的任務(wù)分配算法,建立了人格和情感模型,將人格映射到行為并設(shè)計(jì)了情感互動(dòng)。文獻(xiàn)[9]提出了一種自組織的多機(jī)器人任務(wù)分配算法,研究了集中通信策略下的性能。這些結(jié)果表明本地策略可以在集中任務(wù)策略方面提高系統(tǒng)性能,降低總體通信吞吐量,并降低通信成本,從而擴(kuò)展了對(duì)通信效果的理解。所采用的框架是從對(duì)螞蟻、人類(lèi)和機(jī)器人社會(huì)系統(tǒng)的觀察中得出的自組織分工的通用模型。Gulpinar 等[10]提出了一種構(gòu)造啟發(fā)式算法,該算法基于估計(jì)的邊際效用,將代理和資源按順序分配給任務(wù)。基于這種啟發(fā)式算法,還提出了各種近似動(dòng)態(tài)規(guī)劃方法和一種進(jìn)化算法。Jin 等[11]提出了一種分布式協(xié)調(diào)模型,針對(duì)競(jìng)爭(zhēng)性有限的通信,以競(jìng)爭(zhēng)性方式為多個(gè)非完整機(jī)器人開(kāi)發(fā)了一種新的協(xié)調(diào)控制。在這種建議的控制方法中,只有比賽的獲勝者才會(huì)得到任務(wù)并被激活以朝著目標(biāo)前進(jìn)。
在現(xiàn)有的研究中,假定無(wú)人機(jī)具有自動(dòng)執(zhí)行任務(wù)的能力,并且任務(wù)分配框架只專(zhuān)注于最大限度地減少總成本。但在任務(wù)分配中,尚未廣泛考慮任務(wù)的難度、成功率以及任務(wù)的個(gè)數(shù)。現(xiàn)實(shí)情況是無(wú)人機(jī)沒(méi)有足夠的資源和能力來(lái)執(zhí)行每一項(xiàng)任務(wù),任務(wù)也是多變的。在完成特定任務(wù)中,如果無(wú)人機(jī)數(shù)量不足,聯(lián)盟可能無(wú)法成功完成任務(wù);或者該聯(lián)盟能夠完成任務(wù),倘若再加入幾架無(wú)人機(jī),任務(wù)的成功率和效率可能更高。
本文提出了一種基于資源的建模方法和多無(wú)人機(jī)任務(wù)分配算法,旨在為每個(gè)任務(wù)分配最佳的聯(lián)盟組合,同時(shí)考慮了任務(wù)執(zhí)行的成功率和效能。
1 問(wèn)題描述
1.1 資源模型
將Rn表示為任務(wù)所需的資源,其中n是資源索引,n=1,2,··· ;R是資源類(lèi)型。

6 種資源模型及相關(guān)參數(shù)詳見(jiàn)表1。
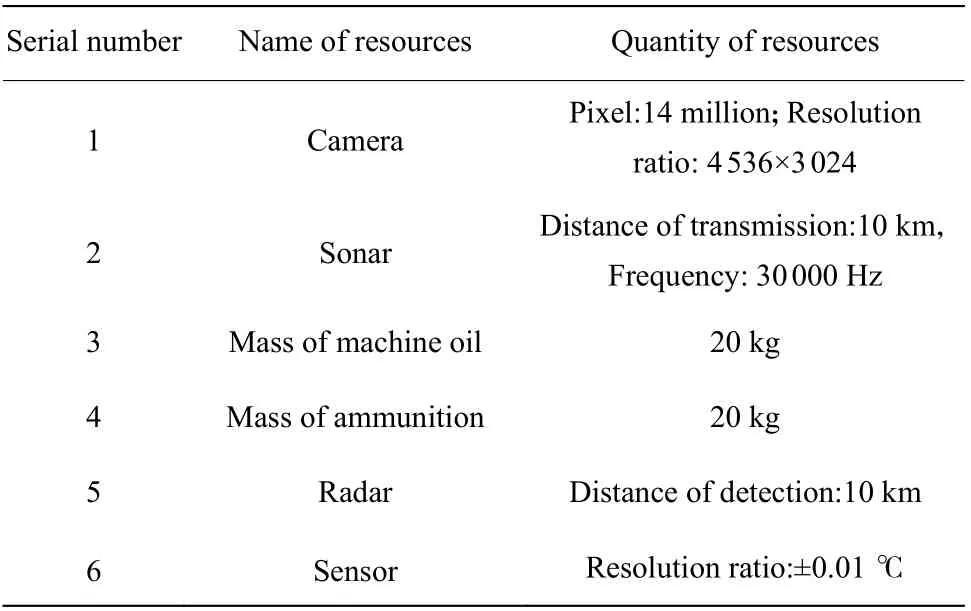
表1 無(wú)人機(jī)的資源Table 1 Resources of UAV
1.2 基于資源約束的無(wú)人機(jī)模型和任務(wù)約束
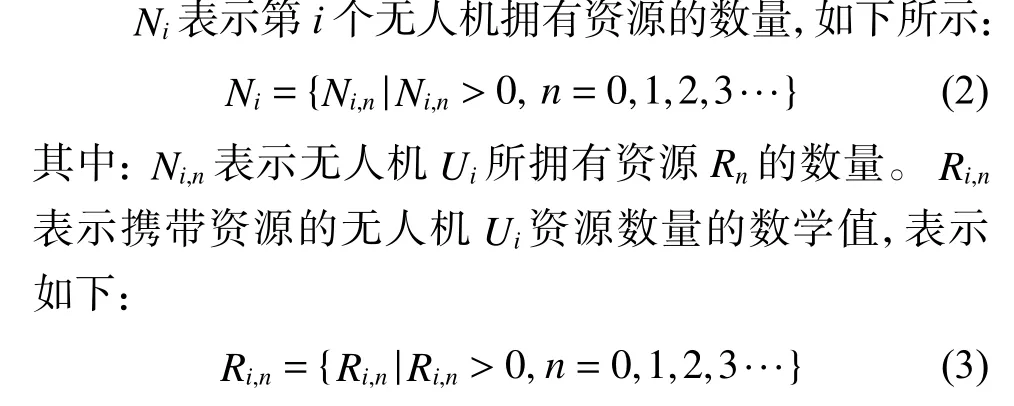
此外,定義資源約束任務(wù)Ti為施加的無(wú)人機(jī)聯(lián)盟C的約束,聯(lián)盟級(jí)別約束通過(guò)任務(wù)Ti反映了高級(jí)資源需求,即促進(jìn)聯(lián)盟中的多個(gè)無(wú)人機(jī)擁有分組完成任務(wù)Ti的能力。強(qiáng)調(diào)多個(gè)無(wú)人機(jī)的協(xié)作技能,例如一個(gè)無(wú)人機(jī)視覺(jué)系統(tǒng)引導(dǎo)其他多個(gè)無(wú)人機(jī)執(zhí)行攻擊任務(wù)。定義Niu為執(zhí)行任務(wù)Ti時(shí)聯(lián)盟必須擁有的資源數(shù)量,如下所示:

此外,每個(gè)聯(lián)盟可能要執(zhí)行多個(gè)任務(wù),任務(wù)的難度有所不同,因此將任務(wù)的難度定義為DT。DT與任務(wù)所需資源、時(shí)間有關(guān),需要的資源越多,花費(fèi)的時(shí)間越多,表示該任務(wù)難度越大,因此可以將DT定義為:

并且DT的函數(shù)表示為[10]:

2 問(wèn)題求解
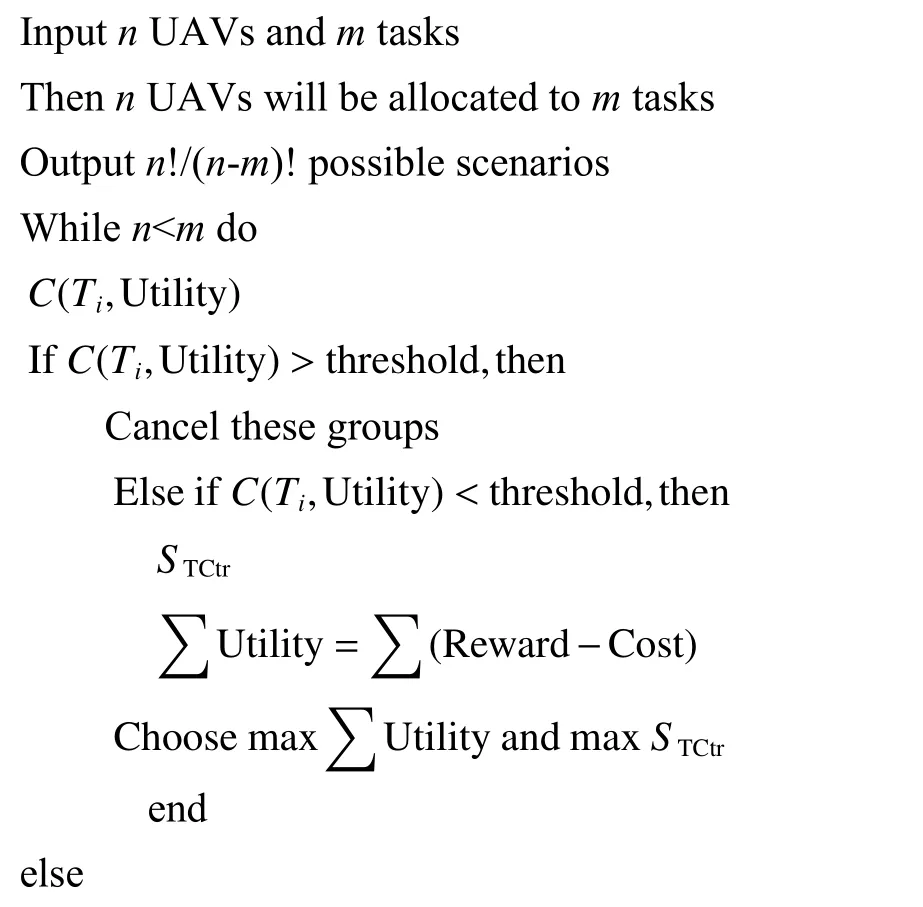
2.1 算法描述
Leader-follower 聯(lián)盟算法主要是通過(guò)啟發(fā)的方式來(lái)形成多無(wú)人機(jī)聯(lián)盟,而任務(wù)分配算法(Task Allocation Algorithm,簡(jiǎn)稱(chēng)TA 算法)是通過(guò)計(jì)算的方式來(lái)實(shí)現(xiàn)多無(wú)人機(jī)的分組,計(jì)算每個(gè)分組方式執(zhí)行任務(wù)的效能值(Utility)、獎(jiǎng)勵(lì)值(Reward)、代價(jià)函數(shù)值(Cost) 和成功率STCtr,將任務(wù)分配給成功率和效能值最大的組合,從而可以更高效地完成任務(wù)。算法核心如下:
2.2 成功率
每架無(wú)人機(jī)具有相同的能力和技能,并且是同類(lèi)型的無(wú)人機(jī),在給定的時(shí)間t內(nèi),根據(jù)資源來(lái)定義決策變量,將資源Rn分配給無(wú)人機(jī)Ui來(lái)執(zhí)行任務(wù)T,用RTru表示該資源的數(shù)量。X是一個(gè)二維變量,表示無(wú)人機(jī)聯(lián)盟C在時(shí)間t使用資源Rn完成任務(wù)T產(chǎn)生的影響,當(dāng)任務(wù)Ti在時(shí)間t分配給無(wú)人機(jī)聯(lián)盟C時(shí),XTCtr為1,否則為0。
因此,可以在t時(shí)刻將任務(wù)T分配給聯(lián)盟C,來(lái)定義任務(wù)執(zhí)行的成功率[12]STCtr,
2.3 代價(jià)函數(shù)
代價(jià)函數(shù)是衡量多無(wú)人機(jī)聯(lián)盟在執(zhí)行任務(wù)的過(guò)程中所產(chǎn)生不理想結(jié)果的函數(shù)。首先,在執(zhí)行任務(wù)的過(guò)程中,飛機(jī)會(huì)不斷消耗機(jī)油和彈藥,這會(huì)產(chǎn)生很大的成本;其次,飛機(jī)在飛行的過(guò)程可能會(huì)發(fā)生其他系統(tǒng)損壞,導(dǎo)致飛機(jī)墜毀;然后,任務(wù)初期,可能還有一些飛機(jī)不執(zhí)行任務(wù),在空中懸停,這也會(huì)產(chǎn)生一定的成本,這些都會(huì)影響無(wú)人機(jī)聯(lián)盟執(zhí)行任務(wù)的成功率。因此,飛機(jī)的成本函數(shù)可以描述為[10]

式中:r表示無(wú)人機(jī)的總數(shù);ns(T)表示在任務(wù)區(qū)域,執(zhí)行T任務(wù)的無(wú)人機(jī)數(shù)量;ncrash(T)表示執(zhí)行任務(wù)T時(shí),發(fā)生墜毀的無(wú)人機(jī)數(shù)量;nb(T)和nf(T)表示執(zhí)行任務(wù)T時(shí),分別消耗的彈藥和機(jī)油數(shù)量;Cloc、Ccrash、Cb和Cf分別表示無(wú)人機(jī)不執(zhí)行任務(wù)、發(fā)生墜毀、消耗彈藥和機(jī)油所產(chǎn)生的成本。
此外,在許多無(wú)人機(jī)任務(wù)分配的應(yīng)用中,為了確定無(wú)人機(jī)聯(lián)盟是否執(zhí)行任務(wù)以及任務(wù)執(zhí)行情況,增加了通信中繼的應(yīng)用程序,確保無(wú)人機(jī)之間、基地和無(wú)人機(jī)之間可以相互交流通信[12-15]。人工操作人員或基于地面的操作系統(tǒng)可以使用此程序向無(wú)人機(jī)發(fā)送命令,或收集和分析來(lái)自無(wú)人機(jī)的實(shí)時(shí)傳感器數(shù)據(jù)。例如,在配備攝像頭的無(wú)人機(jī)進(jìn)行搜索和攻擊的任務(wù)中,操作人員可能需要觀察來(lái)自每個(gè)無(wú)人機(jī)的實(shí)時(shí)視頻來(lái)確定敵方的可能位置。此外,在許多情況下每個(gè)無(wú)人機(jī)的通信范圍可能會(huì)受到限制,特別是可能小于基地和監(jiān)視區(qū)域之間的距離。因此,在這種情況下,有必要形成通信“鏈”,由空間分隔的一串無(wú)人飛行器組成,用于中繼消息在基地和任務(wù)執(zhí)行區(qū)之間來(lái)回傳遞。
為了建立通信鏈的需求,代價(jià)函數(shù)C(T,U)按以下方式修改為[10]

其中:邏輯函數(shù)m(T)取值0 或1,當(dāng)無(wú)人機(jī)之間存在通信聯(lián)系時(shí),m(T)取1;否則取0。
2.4 獎(jiǎng)勵(lì)函數(shù)
盡管執(zhí)行任務(wù)會(huì)產(chǎn)生一定的成本,但是任務(wù)執(zhí)行成功也會(huì)獲取相應(yīng)的獎(jiǎng)勵(lì),每成功地執(zhí)行完一個(gè)任務(wù),無(wú)人機(jī)都會(huì)獲取相應(yīng)的獎(jiǎng)勵(lì)[10]

其中:ait表示任務(wù)分配參數(shù),若已分配任務(wù),則取1,否則取0;Rit表示單個(gè)無(wú)人機(jī)所獲取的獎(jiǎng)勵(lì),Rit=1-e-au;a表示彈藥的性質(zhì);u表示彈藥的數(shù)量。
2.5 效能函數(shù)
在執(zhí)行任務(wù)的過(guò)程中,每當(dāng)這個(gè)聯(lián)盟執(zhí)行完一個(gè)任務(wù)就更新這個(gè)效能函數(shù)值,效能函數(shù)由獎(jiǎng)勵(lì)函數(shù)(Reward)和代價(jià)函數(shù)(Cost)兩部分組成,獎(jiǎng)勵(lì)函數(shù)值減去代價(jià)函數(shù)值即為效能值,效能函數(shù)U[10-12]如下:

3 結(jié)果及分析
3.1 實(shí)驗(yàn)結(jié)果
為了驗(yàn)證該算法的有效性,在Matlab 環(huán)境下進(jìn)行仿真實(shí)驗(yàn),該實(shí)驗(yàn)將3 組任務(wù),共15 個(gè)任務(wù)分配給40 架無(wú)人機(jī),每架無(wú)人機(jī)擁有的資源是相同的,因此,經(jīng)過(guò)計(jì)算,3 組任務(wù)的實(shí)驗(yàn)數(shù)據(jù)分別見(jiàn)表2、表3和表4。
表2 第1 組任務(wù)分配實(shí)驗(yàn)數(shù)據(jù)Table 2 The first set of experimental data on task allocation
表3 第2 組任務(wù)分配實(shí)驗(yàn)數(shù)據(jù)Table 3 The second set of experimental data on task allocation
表4 第3 組任務(wù)分配實(shí)驗(yàn)數(shù)據(jù)Table 4 The third set of experimental data on task allocation
此外,在Matlab 環(huán)境下做了仿真動(dòng)畫(huà)來(lái)進(jìn)一步驗(yàn)證該算法的有效性。動(dòng)畫(huà)中,五角星表示無(wú)人機(jī),虛線代表飛行的路線,圓形表示無(wú)人機(jī)飛行的范圍,三角形表示任務(wù)點(diǎn)位置,三角形面積大小表示任務(wù)難度,顏色變化反映了任務(wù)的執(zhí)行進(jìn)展,分別是深紅、橙色、黃色、綠色和藍(lán)色,其中深紅表示任務(wù)還未執(zhí)行,藍(lán)色表示任務(wù)執(zhí)行完畢。另外,在動(dòng)畫(huà)的中央設(shè)定了一個(gè)飛機(jī)場(chǎng),無(wú)人機(jī)從飛機(jī)場(chǎng)出發(fā),如圖1(a)所示。首先,第1 組任務(wù)共有6 個(gè)任務(wù),由于任務(wù)相對(duì)簡(jiǎn)單,故只由25 架飛機(jī)來(lái)執(zhí)行這些任務(wù),其他飛機(jī)在飛機(jī)場(chǎng)內(nèi)待命。這6 個(gè)任務(wù)中如果有任務(wù)提前完成,該任務(wù)點(diǎn)就消失,同時(shí)飛機(jī)在原地盤(pán)旋,等待被分配第2 批任務(wù),如圖1(b)所示。第2 組任務(wù)共有5 個(gè)任務(wù),且難度較高,40 架飛機(jī)全部執(zhí)行任務(wù),如圖2(a)所示,同樣的,當(dāng)某項(xiàng)任務(wù)先執(zhí)行完畢后,任務(wù)點(diǎn)就會(huì)消失,如圖2(b)所示。當(dāng)執(zhí)行完第2 批任務(wù)后,有15 架飛機(jī)發(fā)現(xiàn)油量和彈藥不足,不能繼續(xù)執(zhí)行接下來(lái)的任務(wù),故這15 架無(wú)人機(jī)先返回飛基地,由剩余25 架無(wú)人機(jī)執(zhí)行第3 組任務(wù),如圖3 所示。

圖1 第1 組多無(wú)人機(jī)任務(wù)分配Fig. 1 The first group of multi-UAV task allocation
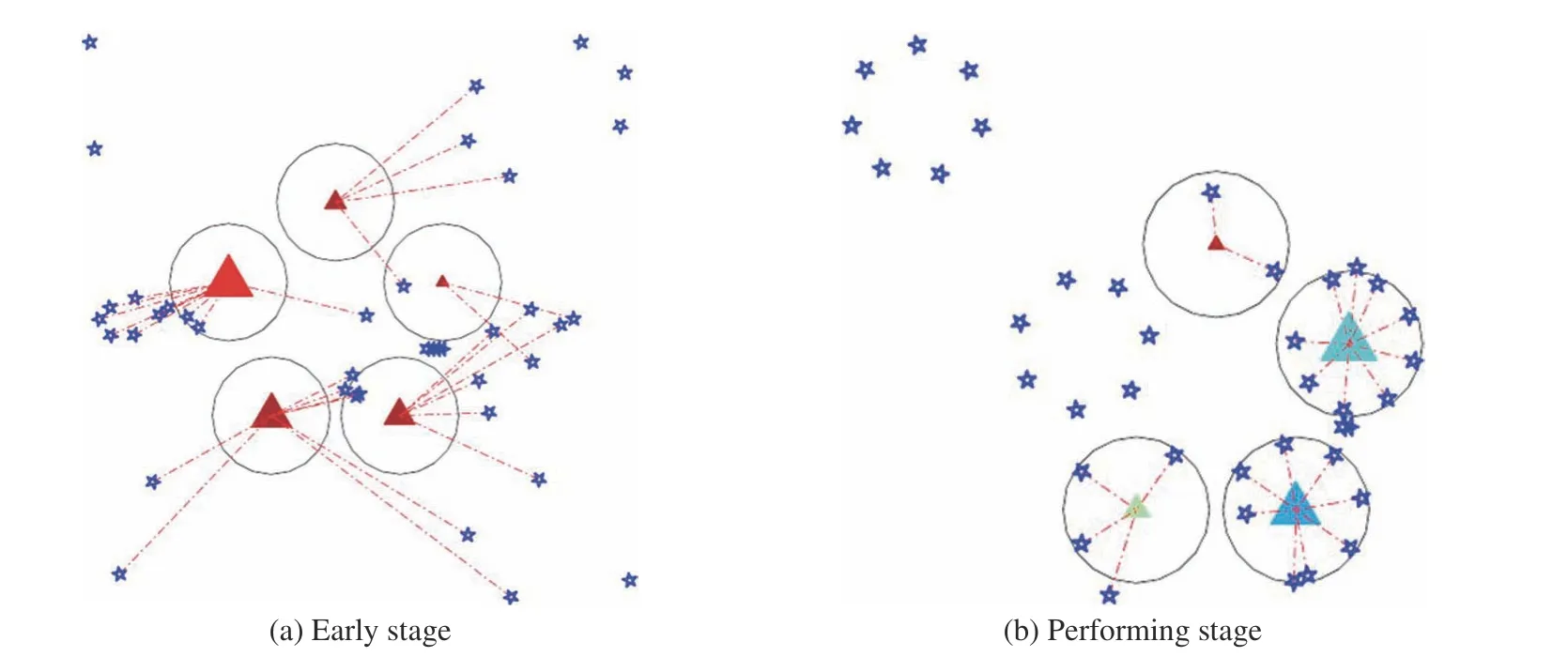
圖2 第2 組多無(wú)人機(jī)任務(wù)分配Fig. 2 The second group of multi-UAV task allocation
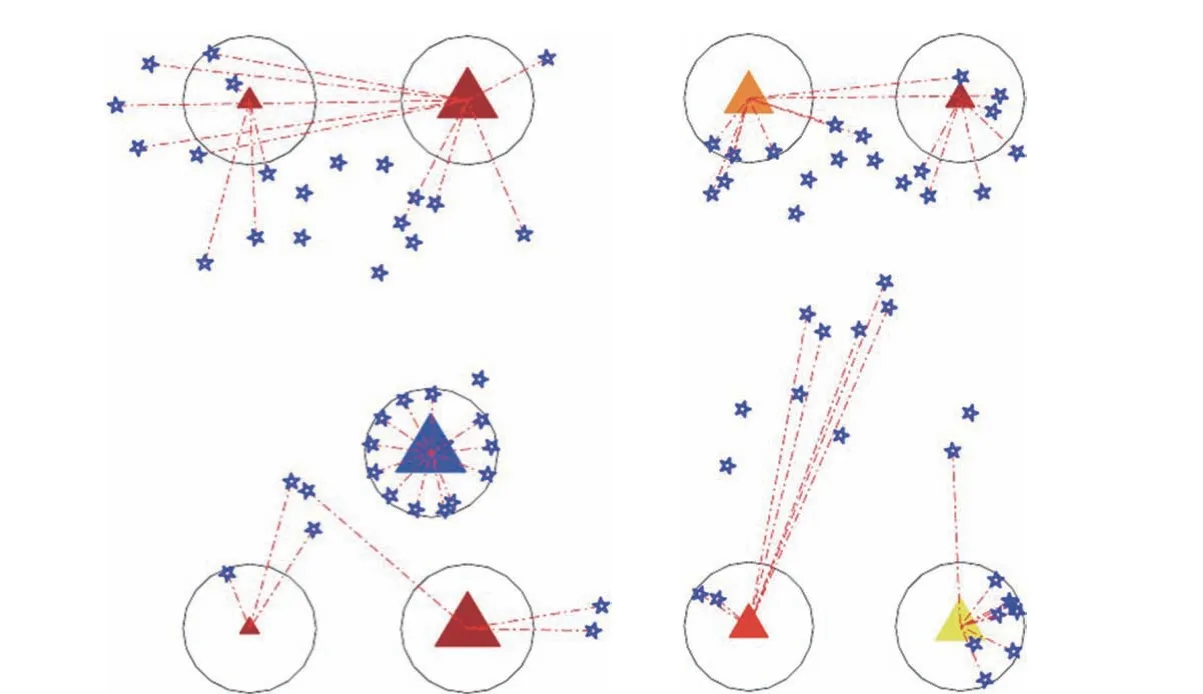
圖3 第3 組多無(wú)人機(jī)任務(wù)分配Fig. 3 The third group of multi-UAV task allocation
3.2 實(shí)驗(yàn)對(duì)比
在利用Matlab 得到理想的效果和數(shù)據(jù)后,也不能確定所采用的TA 算法具有優(yōu)越性,于是,將該算法與遺傳算法[16-17]、匈牙利算法[4]和拍賣(mài)算法[6]進(jìn)行了對(duì)比,結(jié)果見(jiàn)表5、表6 和表7,對(duì)比分析了在這些算法的框架下,飛機(jī)執(zhí)行任務(wù)的成功率、獎(jiǎng)賞值、代價(jià)值和效能值。由于仿真實(shí)驗(yàn)的任務(wù)眾多,故只對(duì)比分析每一輪任務(wù)的第1 個(gè)任務(wù),結(jié)果表明,通過(guò)上述數(shù)據(jù)對(duì)比分析可以得出TA 算法具有一定的優(yōu)越性,在該算法框架下,任務(wù)執(zhí)行的成功率最高且效能值最大。
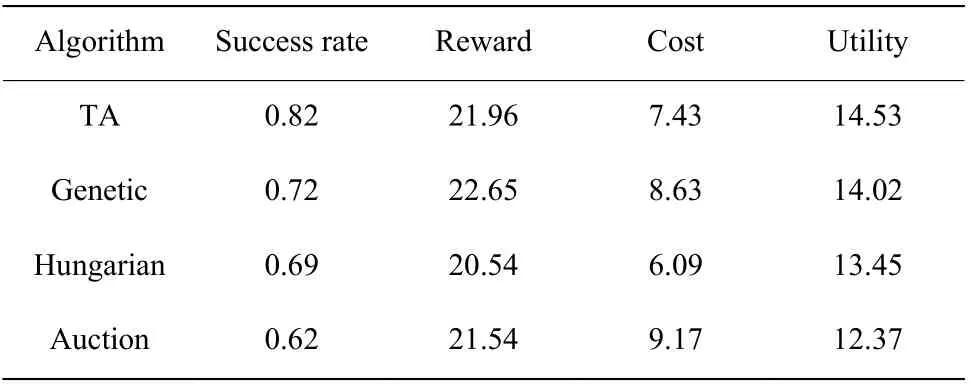
表5 不同算法下第1 組第1 個(gè)任務(wù)實(shí)驗(yàn)數(shù)據(jù)對(duì)比Table 5 Comparison of experimental data of the first round of the first task under different algorithms
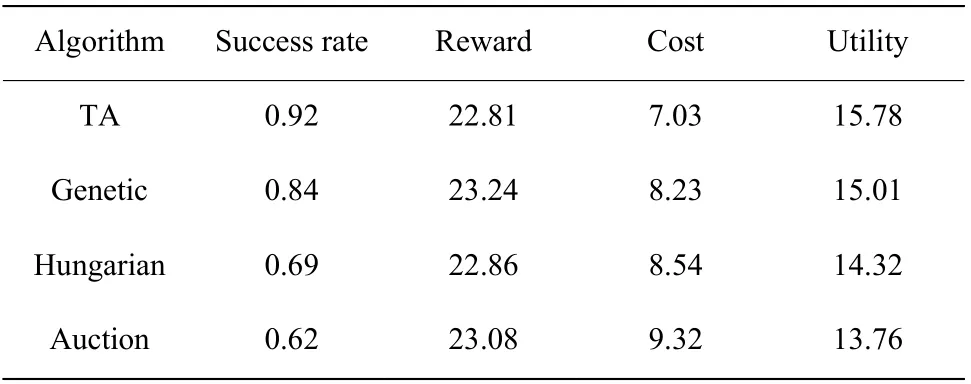
表6 不同算法下第2 組第1 個(gè)任務(wù)實(shí)驗(yàn)數(shù)據(jù)對(duì)比Table 6 Comparison of experimental data of the second round of the first task under different algorithms
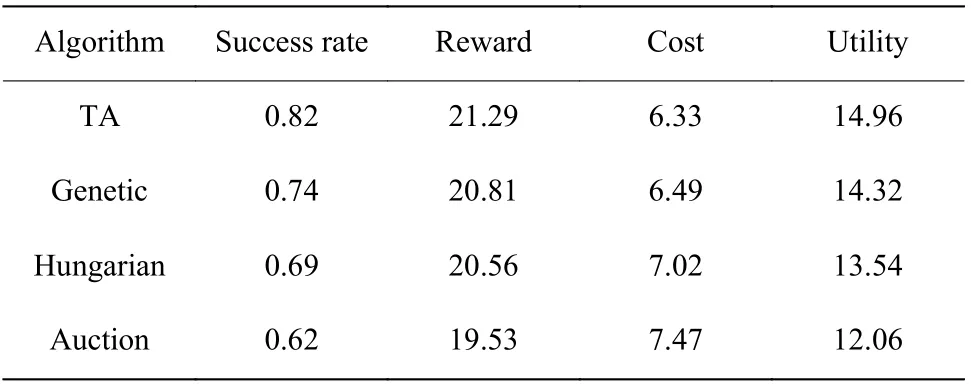
表7 不同算法下第3 組第1 個(gè)任務(wù)實(shí)驗(yàn)數(shù)據(jù)對(duì)比Table 7 Comparison of experimental data of the third round of the first task under different algorithms
4 結(jié)束語(yǔ)
研究了基于資源的多無(wú)人機(jī)任務(wù)分配,提出了一種任務(wù)分配算法,重點(diǎn)介紹了在該算法的有效性,同時(shí)考慮了任務(wù)的成功率、獎(jiǎng)勵(lì)值、代價(jià)值和效能值,將任務(wù)分配給最佳的無(wú)人機(jī)組合,從而提升了任務(wù)分配的準(zhǔn)確性以及任務(wù)的成功率。為了驗(yàn)證該算法的有效性,在Matlab 中進(jìn)行了仿真實(shí)驗(yàn),做了仿真動(dòng)畫(huà),并且對(duì)比了該算法與遺傳算法、匈牙利算法和拍賣(mài)算法的成功率、獎(jiǎng)賞值、代價(jià)值和效能值,證明該算法可以大大提升任務(wù)的成功率和效能值。
猜你喜歡
江蘇安全生產(chǎn)(2023年1期)2023-02-08 05:58:38
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
吉林廣播電視大學(xué)學(xué)報(bào)(2021年4期)2022-01-14 02:35:48
作文成功之路·小學(xué)版(2020年5期)2020-06-11 12:48:26
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
小天使·一年級(jí)語(yǔ)數(shù)英綜合(2018年11期)2018-11-23 09:47:26
資源再生(2017年3期)2017-06-01 12:20:59
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55