基于工業攝影測量的架橋機精確落梁監控系統研究
2021-07-27 02:42:52安志剛
鐵道建筑技術 2021年7期
安志剛
(中鐵第五勘察設計院集團有限公司 北京 102600)
1 引言
我國高速鐵路預應力混凝土簡支箱梁絕大部分都是采用梁場預制的24 m、32 m、40 m預應力混凝土簡支箱梁,并通過架橋機進行現場架設的形式施工。架橋機根據運架形式分為運架分體機和運架一體機。本研究主要針對運架分體機進行的。
當前運架分體機架梁方式分為以下幾個步驟:(1)在架設完上一片梁后,架橋機移動到下一孔并就位,運梁車回梁場運送下一片梁至現場。(2)進行喂梁,將待架梁縱向移動至待架孔正上方,然后進行對位。(3)進行落梁,當梁底距離千斤頂面200 mm時,進行線路縱橫向的精確對位。在喂梁、落梁、精確對位的過程中,每個步驟均需要人員通過人工用尺子測量梁體的位置信息,并將相關信息報送給架橋機操作人員。整個喂梁落梁過程耗時時間長,監控人員和操作人員交互連通頻繁,需要配合人員多,架梁效率不高,落梁精確度難以保證,同時,多個人員分布于梁體上下前后進行人工觀測,存在安全隱患。本文研究了一種架橋機精確落梁監控系統,減少對落梁過程中操作人員的要求,提高落梁效率和落梁質量。
2 架橋機落梁技術要求
傳統落梁過程如下:
(1)架梁作業之前,復核墩臺里程、墊石十字線、墊石高程,并測量支座螺栓孔深度及偏移等,確認各個參數滿足設計要求,保證簡支箱梁順利架設,符合架設精度要求。
(2)落梁過程中(見圖1),由1名技術人員負責指揮,若干工人配合,司機負責架橋機具體操作。箱梁落梁過程中,配合工人密切關注箱梁的前后端,保證箱梁與已架箱梁及前支腿之間的距離,避免出現碰撞。同時,對吊具水平度進行監視(目測),當水平度不滿足要求時必須進行調節。當箱梁下落至底面距離墊石頂20~30 cm時停止落梁,此時,通過操作,對箱梁水平度、前后左右位置進行粗調,粗調完成后繼續落梁。當箱梁底面離墊石頂5 cm時停止,然后進行箱梁位置的精調對中,精確調整梁體前后左右位置,使其達到精度要求。精調完成后繼續緩慢落梁至設計高程。

圖1 落梁過程照片
(3)精調對中方法:在橋墩墊石上標出十字線,同樣在箱梁兩側底部標出十字線,通過人站在箱梁底部,肉眼觀測,使得箱梁十字絲和墊石十字絲重合,從而達到精確對中。
根據相關規范要求,落梁質量要求如表1[1]所示。
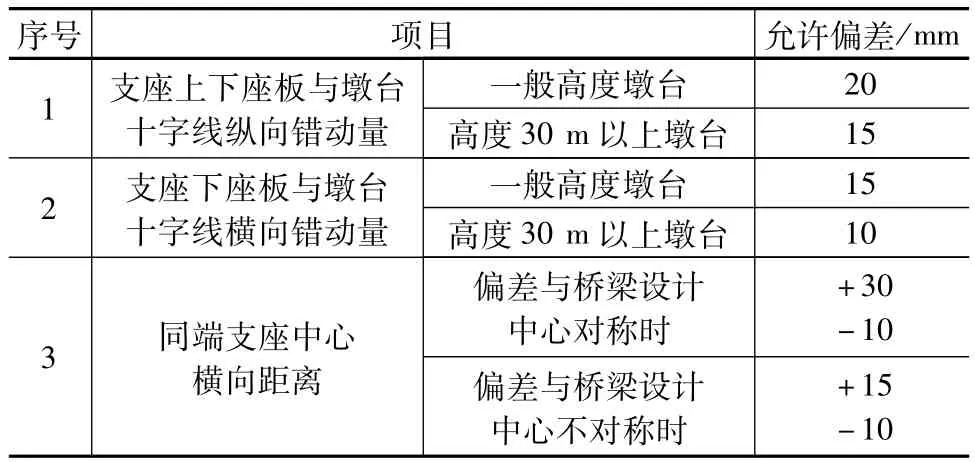
表1 雙線整孔箱梁就位允許偏差
3 自動精確落梁解決辦法概述
自動精確落梁解決辦法的核心是解決箱梁中線和里程位置識別,以及墊石中心識別。
根據對中原理,我們可以劃分為以下兩種方法:
(1)整體坐標法
整體坐標法的概念就是通過定位出箱梁的空間絕對坐標,和線路坐標系統一,知道墊石的設計施工坐標,我們只需要測量出箱梁兩端的中心某一點的坐標,直接進行坐標匹配,控制對中精度。
(2)相對位置法
相對位置法的概念和目前人工對中的方法類似,拋開空間絕對坐標,通過識別出墊石的中心位置和箱梁的中心位置,落梁過程中控制兩個中心位置的距離差值,控制對中精度。
根據落梁中實時監測傳感器的布置形式,我們又可以分為以下兩種方法:
(1)一體系統
一體系統的概念就是監測判定距離偏差的監測系統和控制系統均在架橋機上。落梁過程中,由架橋機自身實時監測位置,并做出控制命令。
(2)分體系統
分體系統即是我們采用的監測傳感器和架橋機分開,監測系統采集數據后通過無線傳輸發送給架橋機。
根據落梁中實時監測手段類別又可分為:衛星定位法、全站儀測量法、攝影測量法[2-3]。
綜合考慮應用的實用性、便捷性、精確性,在此我們選擇對基于工業攝影測量的架橋機精確落梁監控系統進行了設計研究。
4 基于工業攝影測量的架橋機精確落梁監控系統設計
4.1 設計思路
本方案的基本思路是在架橋機上安裝工業攝影測量相機[4-6],并在攝影測量相機可測量范圍內的支座墊石中心、已架箱梁及待架箱梁頂面、架橋機支腿的特征點位置布置工業攝影測量相機配合反射光信號的測量標志。
在喂梁過程中,待架箱梁對墊石中心遮擋前,測量出墩頂墊石中心與已架箱梁頂面、墩頂墊石中心與架橋機支腿上測量標志之間的相對空間位置關系,并存儲至數據處理終端。待喂梁到位開始落梁時,墊石中心被待架箱梁遮擋,此時,直接測量待架箱梁特征位置測量標志與已架箱梁頂面、架橋機支腿上測量標志之間的相對空間位置關系,并調用已經存儲的墩頂墊石中心與已架箱梁頂面、墩頂墊石中心與架橋機支腿上測量標志之間的相對空間位置關系,通過坐標轉換計算,得到待架箱梁特征位置測量標志和墩頂墊石中心的相對位置,從而得到待架箱梁的偏差情況,為落梁控制提供數據支撐。
4.2 基本原理
4.2.1 攝影測量基本原理
攝影測量原理如圖2所示,通過兩臺以上高分辨率的相機對被測物拍攝(或一臺相機移動多個位置拍攝),得到被拍攝物體從多個(2個以上)角度拍攝的照片,通過對照片進行圖像識別及計算分析后得到所拍攝物體精確的空間XYZ坐標[7-9]。所攝平面照片圖像在像平面坐標系中是二維坐標值,但是通過利用攝影焦距參數可以將像點坐標轉換成目標點的多個角度下(兩個角度以上)的觀測值,采用光束法平差技術,通過設置于不同角度的攝影相機同時對多個目標進行測量,得到多余觀測量,進而計算出不同攝影相機之間的空間三維位置關系以及被測物的相對空間XYZ標。架設被測物目標點Pi由j個攝影相機拍攝(j條光線相交)(見圖2),則共有j個共線方程,如式(1)所示。


圖2 攝影測量基本原理
4.2.2 坐標原理
兩個右手空間直角坐標系進行轉換時,一般存在三個平移量、三個旋轉量和一個尺度因子[10]。儀器所構成的測量坐標系O-XYZ先縮放k倍,再旋轉(εx,εy,εz),最后平移(X0,Y0,Z0)后,轉換到被測量坐標系o-xyz中。點P在O-XYZ中的坐標為(X,Y,Z),在o-xyz中的坐標為(x,y,z),則有:

同理也有:

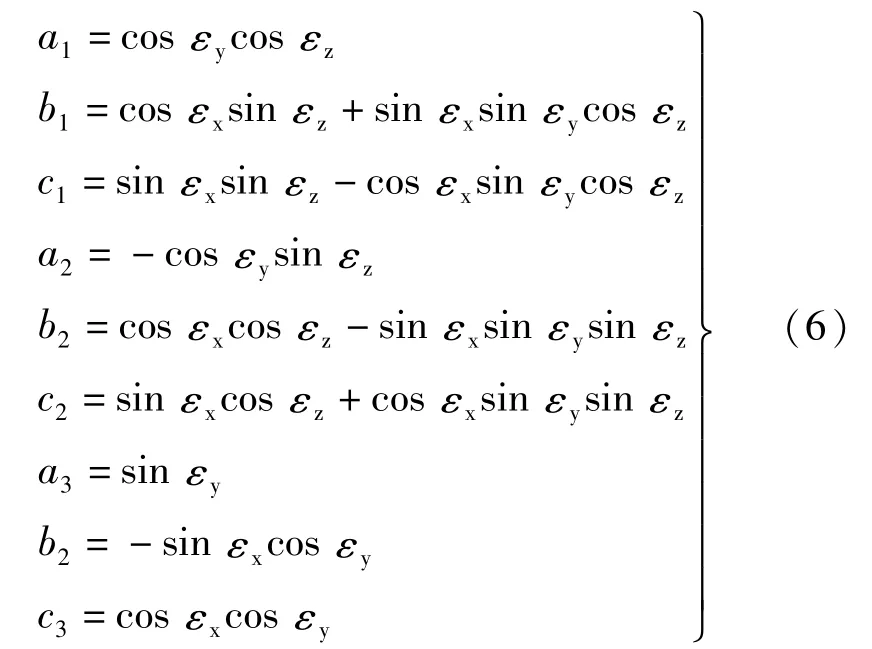
式中,R為旋轉矩陣,繞X、Y、Z測量坐標軸的旋轉矩陣分別表示為:

旋轉矩陣的構造按Kardan旋轉進行,其要點是三個連動的旋轉軸中不出現同名軸。首先繞X軸旋轉x,此時Z軸到達OYZ與OYX兩面的交線位置;其次繞旋轉后的Y軸旋轉y,使Z軸最終到達z軸;最后繞z軸旋轉z,最終使X、Y軸分別與x、y軸重合。則旋轉矩陣R為:
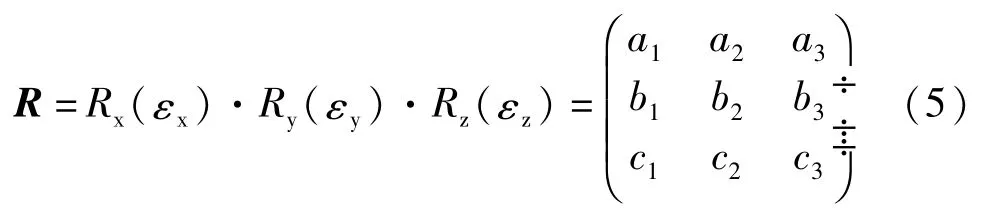
式中,R矩陣的諸參數為:
4.3 設計方案
4.3.1 系統組成
如圖3~圖5所示,基于工業攝影測量的架橋機精確落梁監控系統由工業攝影測量相機[11-12](6)和(7),測量標志(8)、(9)、(10)、(11)、(12)、(13),數據采集終端,監測平臺以及顯示屏幾部分組成。
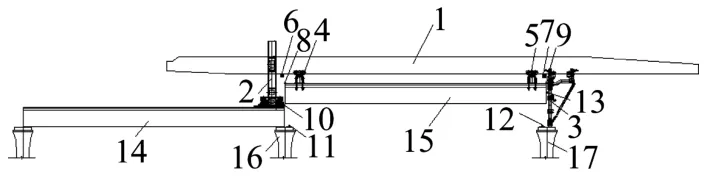
圖3 系統組成示意a
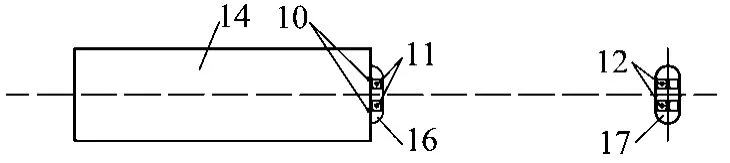
圖4 系統組成示意b
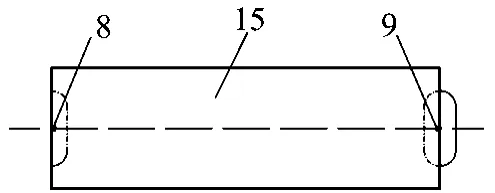
圖5 系統組成示意c
其中測量標志包括布置于架橋機前支腿3表面的測量標志(13),以及設置于待架梁對應橋墩(16)上方支座墊石中心的測量標志(11),設置于待架梁對應橋墩(17)上方支座墊石中心的測量標志(12),以及設置于已架梁(14)前端頂面邊緣,沿邊緣橫向布置的2個測量標志(10),以及設置于待架梁(15)前端頂面邊緣中心的測量標志(9)和后端頂面邊緣中心的測量標志(8)。
其中工業攝影測量相機和數據采集終端、數據采集終端同監測平臺均通過有線方式進行通訊連接。
4.3.2 系統運行流程設計
基于工業攝影測量相機的架橋機落梁偏位監測裝置和方法,運行流程設計如圖6所示。
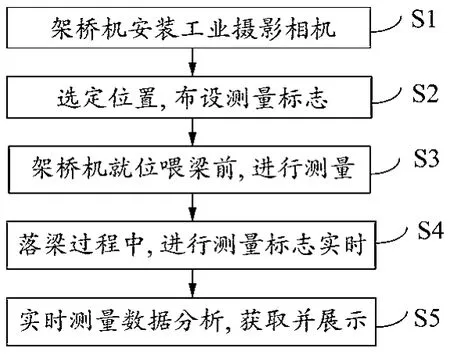
圖6 系統運行流程設計示意
具體實施步驟如下:
步驟S1:在架橋機選定位置固定安裝工業攝影測量相機(6)和(7),并調整角度,以使所述工業攝影測量相機(6)的測量范圍,在落梁前包括測量標志(10)和(11),在落梁過程中包括測量標志(10)和(8);以使所述工業攝影測量相機(7)的測量范圍,在落梁前包括測量標志(12)和(13),在落梁過程中包括測量標志(9)和(13)。
步驟S2:在架橋機前方腿(3)上布設測量標志(13),每個支腿立柱各布置1個,并調整布設位置,以使所述測點在落梁過程中,避開所架梁體的遮擋。架橋機就位后,設置待架梁對應橋墩(16)上方支座墊石中心的測量標志(11),以及設置待架梁對應橋墩(17)上方支座墊石中心的測量標志(12),以及設置已架梁(14)前端頂面邊緣沿橫向布置的2個測量標志(10)。在待架梁對應的前方兩個支座墊石中心,以及后方兩個支座墊石中心,各布設1個測量標志;在已架梁前段頂面邊緣,沿邊緣橫向布置2個測量標志。
步驟S3:架橋機就位,喂梁前,工業攝影測量相機(7)拍攝架橋機前支腿(3)上布設的測量標志(13)和待架梁對應橋墩(17)上方支座墊石中心的測量標志(12);工業攝影測量相機(6)拍攝已架梁(14)前端頂面邊緣沿橫向布置的2個測量標志(10)和待架梁對應橋墩(16)上方支座墊石中心的測量標志(11)。
工業攝影測量相機(7)的拍攝數據經過數據采集終端處理并傳輸至監測平臺,分析處理,以待架梁對應橋墩(17)上方支座墊石中心的測量標志(12)的兩個測量標志相對位置關系建立空間坐標系XYZ-1,并計算得到架橋機前方腿(3)的兩個測量標志在空間坐標系XYZ-1中的三維坐標值。
工業攝影測量相機(6)的拍攝數據經過數據采集終端處理并傳輸至監測平臺,分析處理,以待架梁對應橋墩(16)上方支座墊石中心的測量標志(11)的兩個測量標志相對位置關系建立空間坐標系XYZ-2,并計算得到已架梁(14)前端頂面邊緣沿橫向布置的2個測量標志(10)在空間坐標系XYZ-2中的三維坐標值。
步驟S4:喂梁到位后以及落梁過程中,工業攝影測量相機(7)實時拍攝架橋機前方腿(3)上布設的測量標志(13)和待架梁(15)前端頂面邊緣中心的測量標志(9);工業攝影測量相機(6)拍攝已架梁(14)前端頂面邊緣沿橫向布置的2個測量標志(10)和待架梁(15)后端頂面邊緣中心的測量標志(8)。
工業攝影測量相機(7)的拍攝數據經過數據采集終端處理并傳輸至監測平臺,分析處理,以架橋機前方腿(3)上布設的測量標志(13)的兩個測量標志相對位置關系建立空間坐標系XYZ-1′,并計算得到待架梁(15)前端頂面邊緣中心的測量標志(9)在空間坐標系XYZ-1′中的三維坐標值;依據S4中測量分析結果,對空間坐標系XYZ-1′進行轉換,得到待架梁(15)前端頂面邊緣中心的測量標志(9)在空間坐標系XYZ-1中的空間坐標值。
工業攝影測量相機(6)的拍攝數據經過數據采集終端處理并傳輸至監測平臺,分析處理,以已架梁(14)前端頂面邊緣沿橫向布置的2個測量標志(10)相對位置關系建立空間坐標系XYZ-2′,并計算得到待架梁(15)后端頂面邊緣中心的測量標志(8)在空間坐標系XYZ-2′中的三維坐標值;依據S4中測量分析結果,對空間坐標系XYZ-2′進行轉換,得到待架梁(15)前端頂面邊緣中心的測量標志(8)在空間坐標系XYZ-2中的空間坐標值。
步驟S5:落梁過程中,在S4中得到的待架梁(15)前端頂面邊緣中心的測量標志(9)在空間坐標系XYZ-1中的空間坐標值,待架梁(15)前端頂面邊緣中心的測量標志(8)在空間坐標系XYZ-2中的空間坐標值,與落梁最終的理論設計位置進行對比分析,即得到落梁過程中待架梁的實時位置偏差。實時位置偏差分析結果通過顯示屏通過數字和圖像形式直觀展示給架橋機操作員,輔助其精確架梁。
5 結束語
本文采用基于工業攝影測量技術的方法,通過對架橋機落梁過程中各個特征點連續監測,坐標轉換計算,實現了架橋機落梁過程中偏位狀態的自動監控。該方法的不足之處在于工業攝影測量需要設置專門的測量標志,整個落梁監控系統仍然需要人工參與,為了完善架橋機的自動架梁技術,下一步將圍繞如何進一步減少人工參與,實現完全的自動化問題展開研究。
猜你喜歡
建材發展導向(2021年14期)2021-08-23 00:57:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
城市道橋與防洪(2019年5期)2019-06-26 00:55:40
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
建筑科技(2018年6期)2018-08-30 03:41:12
鐵道學報(2018年5期)2018-06-21 06:21:22
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
工程建設與設計(2016年4期)2016-02-27 10:51:12
