基于光纖光鑷的粒子捕獲與操縱
2021-07-27 03:23:36湯曉云張亞勛劉志海1c楊興華苑立波
物理實驗 2021年7期
湯曉云,張亞勛,張 羽,劉志海,1c,楊興華,苑立波
(1.哈爾濱工程大學 a.物理與光電工程學院; b.教育部光纖集成光學重點實驗室;c.國家實驗物理教育示范中心,黑龍江 哈爾濱 150001;2.桂林電子科技大學 光子學研究中心,廣西 桂林 541004)
自1986年Arthur Ashkin等人[1]首次報道利用單光束勢阱操縱粒子以來,光鑷技術由于可操控微納尺度物質,已廣泛應用于細胞生物學、物理學、化學和生物傳感等眾多學科領域[2-4]. 2018年Arthur Ashkin因其在“光學鑷子在生物系統中的應用”的貢獻獲得了諾貝爾物理學獎,又一次激起了更多科學工作者對光鑷的興趣和關注. 傳統光鑷技術[5]利用高數值孔徑的物鏡聚焦自由空間中的光束,能夠對尺寸從幾十nm(如生物細胞中的DNA[6]、RNA[7])到幾十μm(如細胞[8]、膠體[9]、介質粒子[10])的微粒進行非接觸式、非破壞性的精確捕獲和操作. 但傳統透鏡型光鑷系統復雜,對粒子的操控受系統龐雜的限制,觀測與操控難以兼顧,導致光鑷技術在實際應用發展中受阻.
為克服傳統光鑷技術的不足,1993年,Constable等人[11]提出了光纖光鑷的概念. 由于光纖具有易制造、高靈活性等優點,因此制作簡單、便于集成、操作系統與觀測系統相分離的光纖光鑷成為光鑷發展的新趨勢. 在光纖光鑷的研究和探索過程中,早期研究者利用2根正對的單模光纖實現粒子的捕獲與操作[12-13]. Lyons和Sonek[14]于1995年通過采用具有球形尖端的光纖探針實現光纖光鑷,然而,由于光纖數值孔徑的限制,由單光纖球面錐透鏡出射的弱聚焦光束其梯度力難以達到穩定的三維捕獲強度. 為實現單光纖對微粒的穩定操縱,科研人員利用多種光纖微加工技術[15-20]制作光纖光鑷并將其應用于捕獲和操縱微觀粒子[21-23]. 本文綜述了近年來光纖光鑷在微觀粒子光學操縱方面的研究進展,以利用微結構多芯光纖的多功能光鑷對粒子的多種形式操縱和利用單模光纖模式調控對粒子的功能性操作以及利用調制的全光纖貝塞爾光束實現全能型光纖光鑷為例,就光纖光鑷對目標粒子的捕獲、旋轉、輸運、振動等操作進行詳細的歸納總結,介紹光纖光鑷的發展歷程及其在溫度傳感、染料激光器、粒徑測量和粒子輸運等領域的應用,并將光纖光鑷技術與大學物理實驗教學相結合,開展光的波粒二象性演示實驗的研究性教學探索.
1 光學捕獲的基本概念
1.1 光鑷的基本原理
光學捕獲依賴于光-物質間的相互作用,這主要涉及到2種不同類型的力[24]:一種是把物體拉向激光束焦點的梯度力,另一種是推動物體沿激光束傳播方向運動的散射力. 物體在液體環境中所受的斯托克斯拖拽力和粒子本身的布朗運動等也會影響微粒捕獲的穩定性. 光學捕獲的基本原理是光梯度力大于光散射力,因此粒子可以在靠近光束焦點的位置被捕獲,圖1(a)展示了利用梯度力實現光學捕獲的基本原理. 圖1(b)是常規光鑷系統示意圖,其中紅色為光鑷系統的控制光路,藍色用于照明,最右側是微粒位置測量區,利用物鏡實現對目標物體的操縱. 光纖光鑷直接使用光纖代替常規光鑷系統中的控制光路,利用光纖探針實現對目標粒子的操作,如圖1(c)所示,極大的簡化了光鑷操作系統.
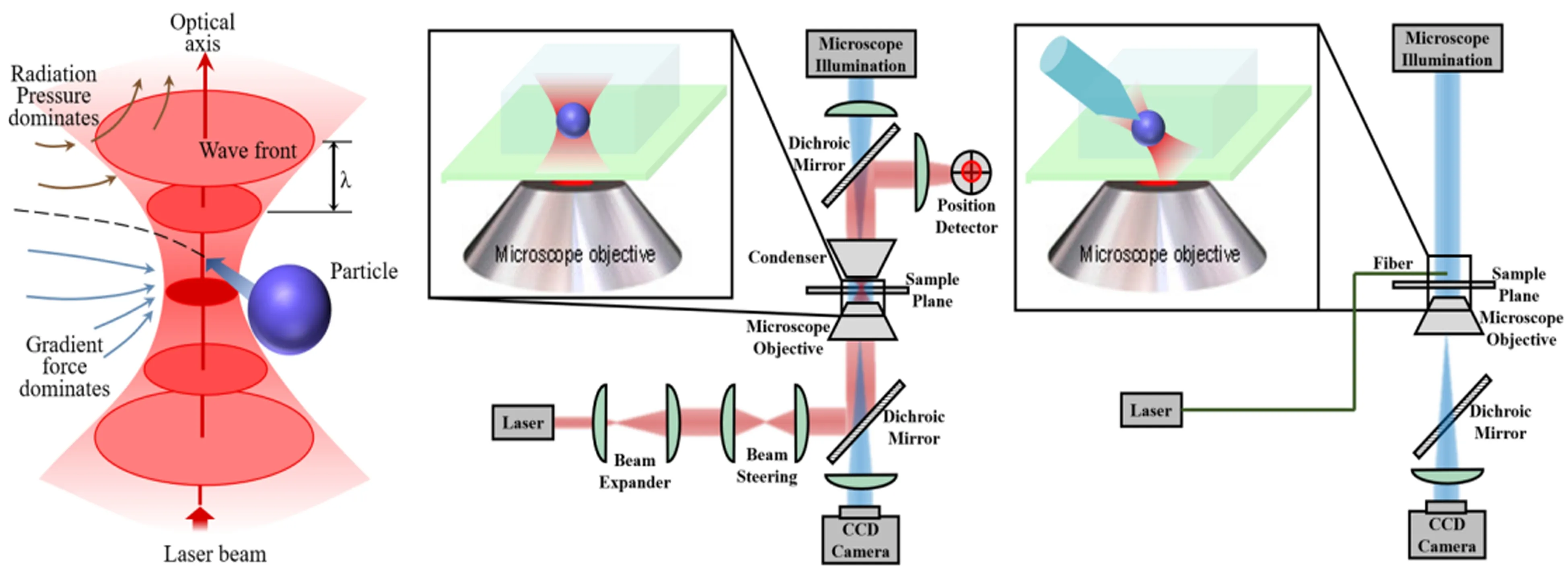
(a)光學捕獲原理圖[20] (b) 常規光鑷系統示意圖 (c) 光纖光鑷系統示意圖
1.2 光學捕獲的理論模型
光學捕獲的理論模型根據粒子和波長之間的關系可分為3類[25]:當粒子直徑比激光波長大1個數量級時,粒子尺寸在Mie散射區,利用幾何光學的射線光學模型可以很好地解釋粒子在光阱中的受力;當粒子直徑比激光波長小得多時,粒子尺寸在瑞利散射區,可采用電磁學模型解釋粒子在光阱中的捕獲原理;當粒子直徑與激光波長相當時,粒子直徑處于Mie散射區與瑞利散射區之間,可以通過洛倫茲Mie理論模型分析粒子在光阱中的捕獲原理. 其中,第3種是最常見的粒子捕獲情形. Arthur Ashkin自1970年提出光鑷[26]以來,產生了各種類型的光鑷,如新光束光鑷、近場光鑷、全息圖光鑷、等離子體光鑷和光纖光鑷等.
1.3 光纖光鑷技術
光纖光鑷直接使用光纖代替常規光鑷系統中的控制光路,利用光纖探針實現對目標粒子的操作,如圖1(c)所示,極大的簡化了光鑷操作系統. 常規光鑷需利用有較大發散場的會聚光束來提供足夠的梯度力實現粒子捕獲與操作. 然而,未經處理的光纖探針,其尖端的輸出光束通常發散角較小,輸出光束難以產生強大的捕獲力. 因此,在光纖尖端構建具有大發散角的聚焦光場是實現光纖光鑷技術的重點,而光纖類型的選擇以及光纖探針尖端的結構是其中2個關鍵因素.
2 基于微結構多芯光纖的單光纖多功能光鑷
在光纖光鑷的研究與發展過程中,為了克服光纖數值孔徑對于光纖光鑷技術的限制,Liu等人[15]利用單模光纖熔融拉錐技術制成如圖2(a)所示的拋物線型光纖探針,首次實現利用單光纖光鑷對酵母細胞的捕獲與操作,如圖2(b)所示.
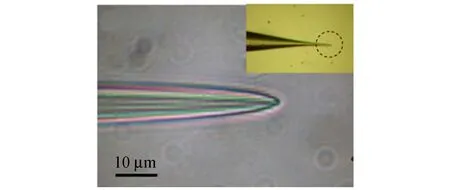
(a) 拋物線熔融拉錐型光纖探針
然而,基于單光纖的光鑷探針一般只能對粒子進行捕獲和移動,在物理化學等實際研究與應用中還需對粒子進行更多的三維非接觸式操作與裝配. 為了實現光鑷對目標物體的靈活操縱,Taguchi等人于1997年提出了基于光纖的光學微操手[18]. 利用多芯光纖、環形芯光纖、同軸雙波導光纖等特殊結構的光纖通過光纖微加工實現對目標粒子的旋轉、輸運、振動等多種功能.
2.1 基于多芯光纖的光學微操手
多芯光纖光鑷探針通過光纖微加工技術調制多芯光纖纖芯中的多光束傳輸,實現微粒的非接觸式捕獲和旋轉[27]. 其中,雙芯光纖是纖芯數量最少的多芯光纖,Yuan等人[28]于2008年提出了基于雙芯光纖的單光纖光鑷,通過熔融拉錐技術制作光纖尖端突變的雙芯光纖探針,實現酵母細胞的捕獲,如圖3(a)所示. 由于經過熔融拉錐的光纖探針其輸出光的束腰在光纖尖端,這種雙芯光纖光鑷探針僅能實現接觸式酵母細胞捕獲. 然而,接觸式捕獲有可能會損害粒子的表面特性,不利于對微粒的研究[29-30]. 因此,Yuan等人[31]在2012年利用光纖研磨與拋光技術,將雙芯光纖加工成圓錐臺型光纖光鑷探針,實現對酵母細胞的非接觸式捕獲,如圖3(b)所示. 雙芯光纖中傳輸的光束在光纖錐面進行全反射,經光纖端面折射,在遠離光纖端面位置會聚形成強梯度勢阱,實現酵母細胞的非接觸式捕獲. 由圖3(a)和3(b)可知,雙芯光纖纖芯中傳輸的光束構建的單光學勢阱,可實現單個酵母細胞的捕獲. 對稱分布的四芯光纖光鑷可形成2個光學勢阱,通過調節這2個光學勢阱可靈活操縱粒子,實現捕集、旋轉和振蕩的光學微操手功能. 當基于四芯光纖的光學微操手形成關于光纖軸對稱的雙光鑷時[32],四芯光纖微操手可實現粒子的震蕩操縱,光纖光鑷通過研磨拋光制成如圖3(c)所示的截頭金字塔. 模擬結果表明,通過調節雙光鑷的光強度分布可使粒子在2個光阱力作用下實現粒子振蕩,從而獲得全光纖粒子振蕩器.
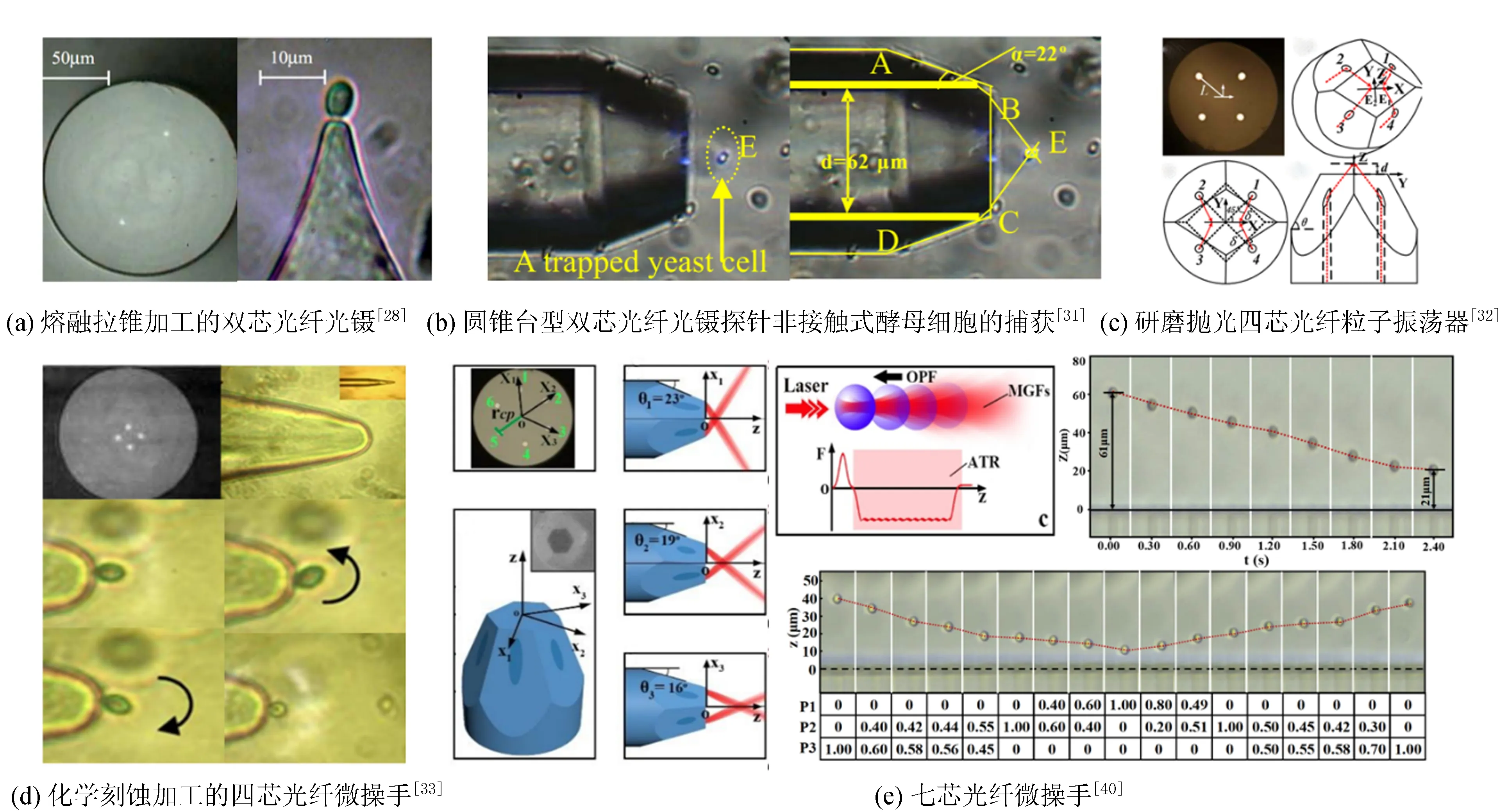
圖3 基于多芯光纖的光學微操手
四芯光纖通過化學腐蝕,可使四芯光纖微操手的2個光阱會聚于一處[33]實現粒子的捕集與旋轉功能,如圖3(d)所示. 四芯光纖微操手捕獲酵母細胞時,細胞長軸平行于光纖軸向,通過調節四芯光纖纖芯中的光場分布獲得使酵母細胞旋轉的力矩,實現酵母細胞沿逆時針或順時針方向的偏轉操縱;也可實現酵母細胞垂直于紙面的旋轉操作. 這種基于四芯光纖微操手的粒子旋轉方法,既不需要借助特殊調制的矢量光束[34-35]又不需要制造特殊的粒子[36-37],是一種簡單的實現粒子旋轉的方式.
單光纖中的2個光學勢阱既可實現微粒旋轉功能亦可制作基于光纖的粒子振蕩器,單光纖多光學勢阱的疊加可對粒子實現更多功能性操作,如通過改變七芯光纖出射光強的梯度分布,可產生全光纖的主動式牽引光束[38-39],如圖3(e)所示. 通過光纖研磨,將3個等效的雙芯光纖光鑷集成在1根七芯光纖中,加工成截頭為六角錐體的七芯光纖光鑷在沿著光纖主軸產生3個分立的光學勢阱,從而能夠獲得基于七芯光纖的粒子多功能操縱探頭. 調節和控制每個纖芯的入射激光功率,可以實現粒子的捕獲、長距離牽引、雙向傳輸和軸向位置可控調節[40]. 基于七芯光纖的全光纖探頭具有光鑷與牽引光束的兼容性,光束牽引有效范圍增加,從而拓寬了光捕獲的范圍. 這種通過調節光強度的梯度分布產生全光纖主動式牽引光束的方式,擴展了光纖對粒子的操作方式.
因此,基于多芯光纖的單光纖光鑷可實現粒子的多功能操縱:包括粒子捕獲、旋轉、振蕩與位置調節等,在生物學、細胞分選、生物醫學等相關領域具有巨大的應用潛力.
2.2 基于同軸雙波導光纖的光槍
光纖光槍在粒子捕獲基礎上可發射粒子. 相比常規光纖光鑷而言,光槍需在捕獲粒子后施加額外的力將粒子推離捕獲勢阱,粒子三維捕獲的過程可類比為子彈裝載,額外力將粒子推離捕獲勢阱的過程可類比為子彈發射. 具有環形分布纖芯和中心纖芯的同軸雙波導光纖可構成粒子捕獲和發射的光槍,見圖4[41]. 通過光纖研磨技術將同軸雙波導光纖加工成圓錐臺型的光纖探針,環形光束耦合到同軸雙波導光纖的環形纖芯中,經全反射,在光纖前端出射會聚形成穩定的光學捕獲勢阱[42],可實現微粒的捕獲,見4(a)[41]. 耦合到同軸雙波導光纖的中心纖芯的高斯光束,可提供額外的力將粒子推離捕獲勢阱,見圖4(b). 當高斯光束作用在目標粒子上的推力超過了環形纖芯的捕獲力時,被捕獲的粒子會沿光束傳播方向射出,圖4(b)中粒子運動軌跡表明了同軸雙波導光纖中心纖芯對捕獲粒子的發射作用. 因此,基于同軸雙波導光纖的光鑷既可對粒子進行捕獲又可通過中心纖芯將粒子發射. 這擴展了基于光纖的光學操作的應用前景,可以應用于生物學的微粒分選、粒子的靶向輸送以及觀察藥物的協同作用.
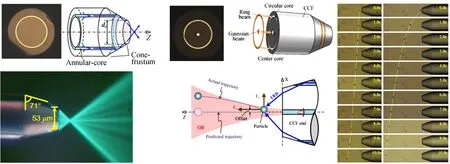
(a)基于環形芯光纖的粒子捕獲與裝載[42] (b)基于同軸雙波導光纖的光槍[41]
3 基于普通單模光纖的通用型單光纖多功能光鑷
基于微結構光纖的單光纖光鑷在實現粒子捕獲的同時可以實現多功能應用,但由于該種光鑷所使用的特種光纖價格昂貴,加工復雜,使得該光纖的光鑷技術難于推廣. 基于普通通信光纖的單光纖光鑷對大多數研究人員而言更為方便和利于推廣,因此,簡化光纖光鑷探針的加工技術和兼顧對目標粒子進行多種操控是光纖光鑷面臨的關鍵問題.
3.1 基于光纖模式復用的單光纖光鑷
通過模式復用技術使普通單模光纖實現微粒的位置調整和旋轉,有利于光纖光鑷的推廣與應用. 基于單模光纖的模式復用技術,通過2種模式(LP01和LP11)的功率調整與選擇,可實現粒子位置的調整,如圖5(a)所示[43]. 將980 nm的單模光纖偏移2 μm拼接到G.652光纖上產生LP01和LP11模式,利用光纖上裝配的模式選擇器控制選擇輸出光束模式. 將單模光纖探針加工成帶有半透鏡的錐形尖端,LP01模式的光束在單光纖光鑷探頭中起主要作用時,光纖探頭對酵母細胞進行捕獲. 通過調節模式選擇器,將光纖中傳輸的LP01模式的光束改為LP11模式后,酵母細胞沿光纖軸向向光纖探針方向進行位置調節. 為驗證通過切換2種不同模式的光束可以實現粒子軸向位置的調節,當仿真得到LP01模式的光束入射到光纖探針中時,光場光強最強的位置在zf處;當LP11模式的光束入射到光纖探針中時,光場光強最強的位置在zc處. 該單光纖光鑷通過控制LP01和LP11模式光束的功率比,可實現非接觸式光學捕獲和捕獲粒子的軸向位置調節.
通過在圖5(a)的光鑷實驗裝置上加載光束扭轉控制單元和張力加載單元,可控制LP11模式光束的兩瓣的功率分布,實現雙酵母細胞繞光纖軸的旋轉操作[44],如圖5(b)所示. 相較于使用基于特種光纖的光學微操手而言,基于單模光纖的模式復用型光纖光鑷結構更為簡單且易于實現,同時,單光束捕獲粒子的激光強度低于多光束捕獲,從而降低了粒子被破壞的可能性. 基于光纖模式復用的單光纖光鑷簡化了光纖光鑷對捕獲粒子的位置調節與旋轉的操作.
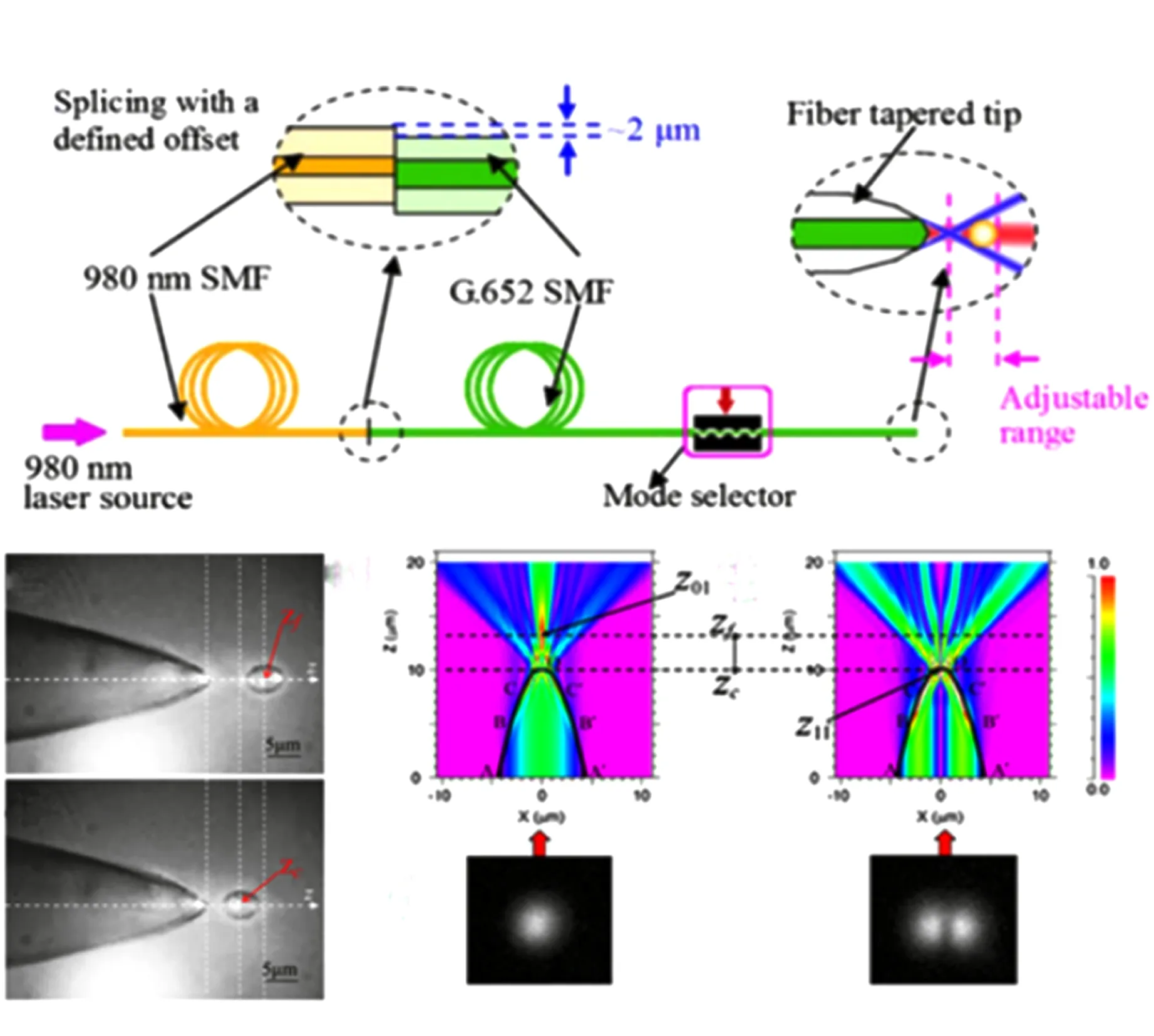
(a)基于單模光纖模式復用技術的單光纖光鑷捕獲及其軸向位置調整[43]
此外,基于漸變折射率多模光纖的光鑷探頭也是實現光纖光鑷多功能操作的手段之一. 通過調節漸變折射率多模光纖中光束的傳播形式,可使漸變折射率多模光纖光鑷實現粒子的捕獲以及軸向位置調節等多種操作[45-47].
3.2 基于貝塞爾光束的單光纖光鑷
基于單模光纖的模式復用型光纖光鑷可實現粒子的軸向位置調節與旋轉,為了實現基于通信光纖更多功能的光纖光鑷,可利用基于光纖的特殊光束形式的光鑷實現粒子的多功能操作,其中,貝塞爾光鑷是實現粒子多功能操作很好的手段. 貝塞爾光束[48]是具有無衍射自修復性質的特殊光束,存在多種產生形式. 基于空間光路的貝塞爾光束構建形式主要有:環縫-透鏡法、軸棱鏡法以及計算機全息法等[49-52]. 基于光纖的貝塞爾光束產生方式主要有:單-空、單-多以及光纖微加工等方法[53-56]. 通過復合光纖多模干涉產生光纖類貝塞爾光束是產生全光纖類貝塞爾光束的常用方式,當單模光纖與階躍多模光纖同軸熔接時,單模光纖中的基模LP01被耦合到階躍多模光纖內,在階躍多模光纖中激勵出的LP0n模式可由貝塞爾函數表示[48]. 通過調制全光纖貝塞爾光束,可實現多粒子(比如納米粒子、低折射率粒子和吸收性粒子等)的三維捕獲操作.
3.2.1 基于單光纖類貝塞爾光束的多粒子三維捕獲
錐形單光纖的有效捕獲距離有限,且一般僅能實現單個微粒的捕獲操作. 而在一些應用中,不同微粒進行穩定的非侵入式的對比實驗是極其必要的. Zhang等人[57]提出了一種用于多粒子三維捕獲的全光纖貝塞爾光鑷,通過單模光纖和階躍多模光纖的同軸拼接,在特殊設計的光纖探針尖端對貝塞爾光束進行調制,實現多個粒子的三維捕獲. 光纖探針采用光纖研磨和放電電流熔融兩步成型,加工成特殊的半橢球形結構,如圖6(a)所示. 光纖探針在沿光束傳播方向距離光纖尖端分別為3,23,60 μm處形成3個穩定捕獲位置. 多個粒子在光纖光鑷軸向不同位置的捕獲有利于進行多粒子的對比實驗,為多種物質的協同作用提供工具.
3.2.2 基于單光纖類貝塞爾光束的納米粒子捕獲
由于傳統聚焦光學系統的光學衍射極限,小于入射激光波長一半的粒子很難進行捕獲[58]. 因此,找到一種利用足夠小的入射激光功率捕獲納米粒子的方法是很有必要且具有重要意義. 通常,使用高倍鏡聚焦激光束可以實現小的聚焦點[59-61]. Tang等人[62]通過組裝大曲率半徑的高折射率小球調制光纖類貝塞爾光束,經過強聚焦形成納米級光點,如圖6(b)所示. 會聚光點沿z軸方向和x軸方向的半高寬分別約為1.2λ和λ/2.8,光束在z軸方向比之前的光纖光鑷結構擁有更小的半高寬,可實現對直徑200 nm的聚苯乙烯粒子的捕獲操作. 該光纖探頭具有激光傳輸效率高、空間分辨率高、發熱量少等優點,擴展了基于光纖的光學加工的應用潛力,如納米粒子分類、單細胞分析和生物傳感等.

(a) 基于單光纖類貝塞爾光束的多粒子三維捕獲[57]
3.2.3 光學暗阱
在膠體物理/化學[63]和靶向給藥等應用中,捕獲和操縱折射率低于背景溶液的微觀粒子具有重要意義[64-67]. 然而,由于傳統光學捕獲工具施加在低折射率粒子上的是斥力,為了捕獲低折射率粒子就需要構建光學暗阱. 這就需要精心設計光束形狀[68],具有相位奇點的渦旋光束如高階貝塞爾光束[69-71]和拉蓋爾高斯光束[72-74],被認為是實現低折射率粒子捕獲的方式;傳統的全息光束[75]或干涉圖形[76]也被應用于低折射率粒子捕集. 然而對于單光纖光鑷而言,難以實現暗阱的構建.
基于光纖的貝塞爾光束是1組同心圓環,利用大曲率半徑的透鏡可將圓環會聚構建光學暗阱,實現低折射率粒子的捕獲,如圖6(c)所示. 當階躍多模光纖長度為1 365 μm時,其光纖端面傳播中心為暗場的高階貝塞爾光束,利用高折射率透鏡球會聚基于光纖的類貝塞爾光束獲得如圖6(c)所示的光學暗阱[77],DT1為第1個黑暗陷阱,DT2為第2個黑暗陷阱. 利用該光纖探針可實現在折射率為1.455的三乙二醇溶液中捕獲折射率為1.4的酵母細胞. 該光纖探針結構簡單,精度高,成本低,體積小,在化學反應、生物醫學等領域具有廣闊的應用前景.
3.2.4 基于單光纖類貝塞爾光束的吸收性粒子捕獲
在純甘油溶液中利用Δα型光泳力可實現高斯光束對單一吸收性黑球的操作,然而單光束很難實現對于多個吸收性黑球的同時操作,Zhang等人[78]利用貝塞爾光束傳播中的無衍射自修復特性,實現了吸收性粒子在液體環境中的多點捕獲與操作,如圖6(d)所示. 多個吸收性粒子的共同操作,有利于多樣本的研究工作,也有利于開展對吸收性物質的研究工作.
4 光纖光鑷技術在生物與傳感領域的應用
光鑷作為研究微小粒子的工具,其主要貢獻在于能夠提取微生物和細胞世界中不易檢測到的重要信息,這些信息可以與生化信息相關聯. 光纖光鑷在溫度傳感、基于回廊模的液體染料激光激發、粒徑測量和粒子輸運等領域有著廣泛的應用.
4.1 基于光鑷技術的溫度傳感
光纖光鑷已經成功地用于微觀粒子的捕獲、傳感和一些物理參量測量[79-83]. 2014年Zhang等人[84]提出了基于雙光纖光阱技術的溫度傳感器,該溫度傳感器采用光纖化學蝕刻法和光干涉信號檢測技術,設計并制作2個具有特殊孔洞的光纖探針,實現自動準備和復位的光纖光鑷,如圖7所示. 通過光干涉信號檢測技術可得到粒子在一定光阱力作用下的運動速度與加速度,由此通過斯托克斯公式可獲得待測環境溫度,實現溫度傳感和測量功能. 這種溫度傳感裝置為光鑷技術在傳感研究領域的應用提供了新的發展方向,解決了光鑷測量重復性問題,且便于與其他微光學設備平臺集成.
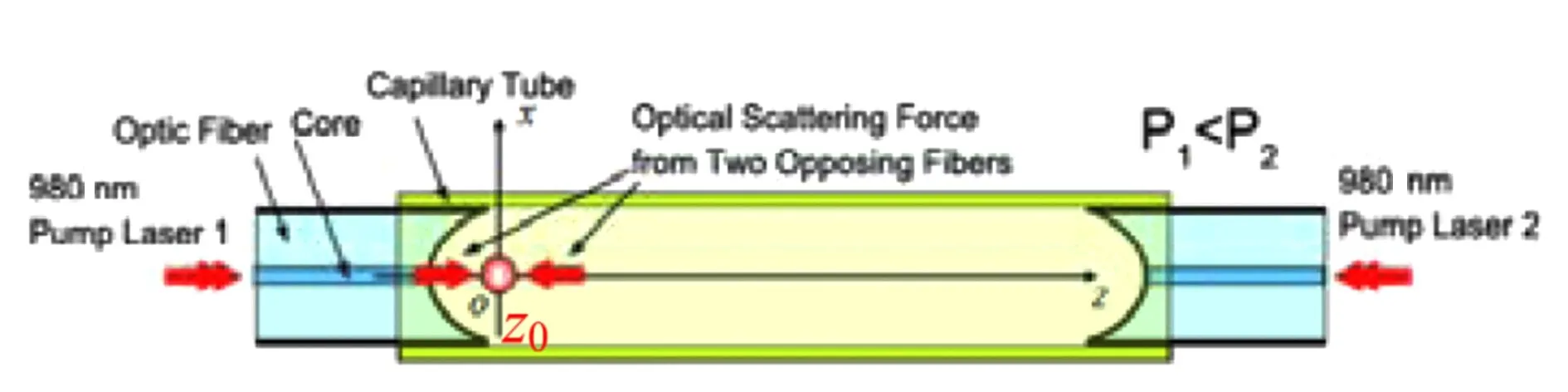
(a)溫度傳感器示意圖(在初始時刻,微粒被困在z0位置)
4.2 基于回廊模的液體染料激光器
相對于固體微球而言,在表面張力的作用下形成的微米級液滴是近乎完美的球體,被認為是作為激光光學諧振腔的完美形狀[85-86]. 液體微液滴的形狀、大小和組成可以很容易地進行調整,這為控制液體微激光器開辟了新的道路.
Liu等人[87]使用單光纖光鑷穩定捕獲和控制摻雜有激光染料的液滴,利用光纖波分復用技術,將捕獲光源和泵浦光源耦合到圓錐臺型光纖探針的環形纖芯中,對液滴進行捕獲、控制和激光泵浦. 當泵浦光源能量低于激光閾值時,不產生激光,只能看到液滴發出的熒光. 發射液滴中摻雜的激光染料產生的熒光共振光譜,如圖8(a)所示. 當泵浦光源的能量高于激光激發閾值時,激光激發將發生在液滴的薄層表面,可得到多縱模的激光光譜,當液滴直徑為24 μm,泵浦能量為1.3 μJ時,測量的自由光譜范圍(FSR)是3.7 nm,如圖8(b)所示,此時除了熒光還可看到液滴發出的激光,如圖8(b)所示,此時除了熒光還可看到液滴發出的激光,泵浦脈沖能量與發射光譜峰值強度的關系如圖8(c)所示,其中相關關系被劃分為低斜率和高斜率線性區域,激光閾值由2條擬合直線的交點決定. 因此,當油滴直徑為24 μm時,泵浦能量的閾值為0.7 μJ. 這種基于單光纖光鑷技術的激光激發方法為微液滴激光激發技術在生物領域的應用開辟了新的應用途徑.
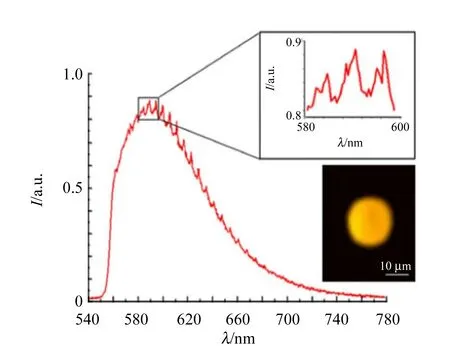
(a)摻雜液滴的熒光發射光譜和液滴發出熒光的圖像
4.3 基于光鑷技術的粒徑測量
光纖光鑷技術也可進行粒子捕獲與粒徑測量. 相對于傳統測量粒徑的彈性散射法[88-90]和腔增強型拉曼光譜法[91-93]而言,光纖光鑷技術不需要借助笨重且昂貴的光學儀器,也不需要復雜的空間光路. Liu等人[94]利用同軸雙波導光纖的環形纖芯實現粒子捕獲,通過光纖中央纖芯發射和接收干涉信號,可根據干涉譜得到的FSR計算獲得被捕獲粒子的粒徑信息(圖9). 由于同軸雙波導光纖的2個纖芯中傳輸的光相互獨立、互不影響,避免了信號之間的耦合和串擾,且該光纖探針的加工方式簡單、操作方便、體積小巧,有利于光纖集成化和芯片化的發展.
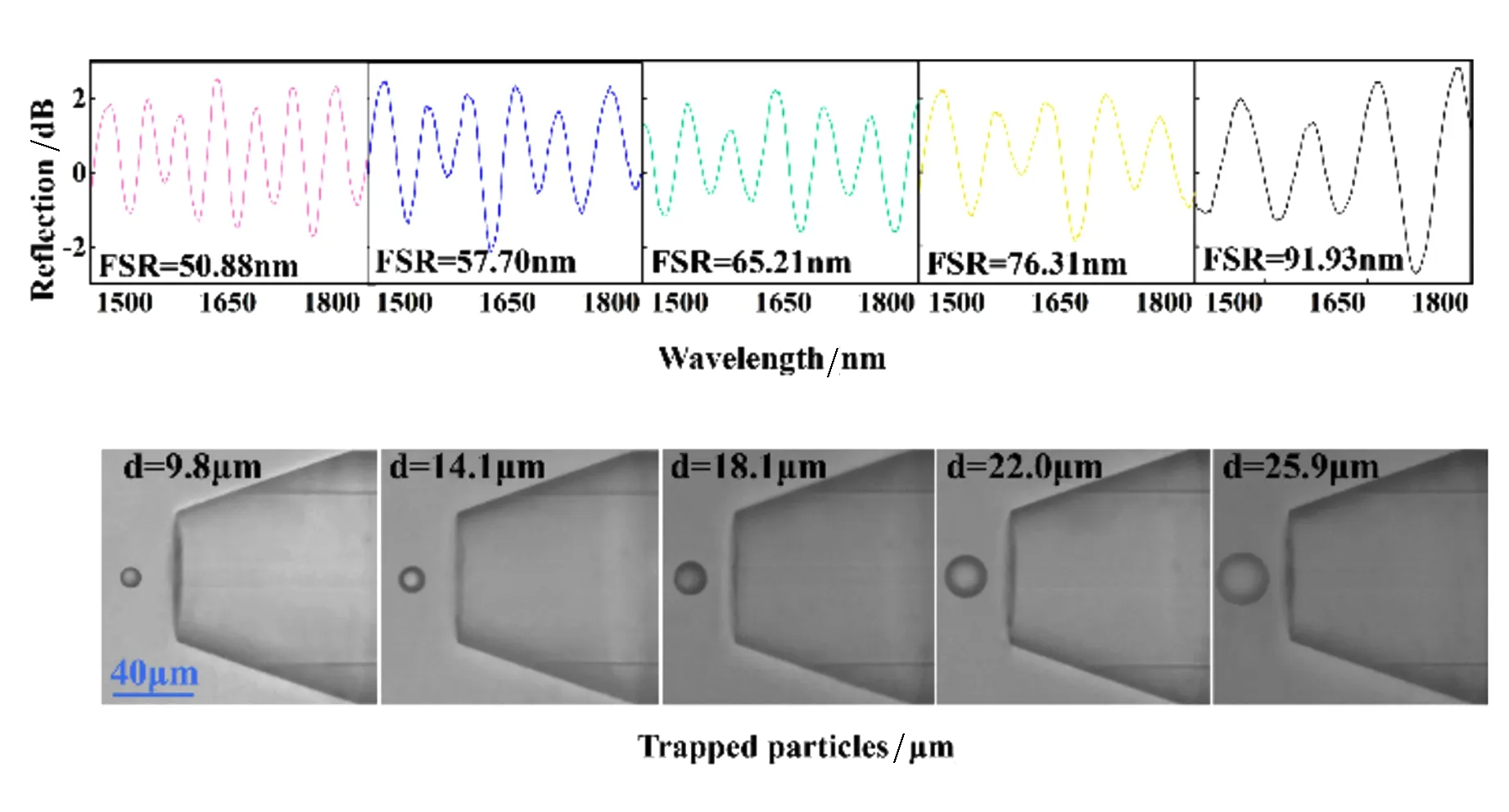
圖9 粒子直徑的變化導致干涉譜的FSR發生變化[94],不同大小的聚苯乙烯小球的捕獲以及其所對應的干涉譜
4.4 粒子曲線輸運
光鑷技術不僅可使粒子實現直線式輸運,同時也是使粒子曲線式輸運幫助粒子越過障礙物進行傳輸的重要工具[95-96]. 通過錯芯拼接單模光纖與一定長度的階躍多模光纖,可得到不對稱的貝塞爾光束. 將多模光纖尖端熔融為半球形透鏡,可使其產生在自由空間中沿拋物線軌跡傳播的光束,并產生橫向加速度,從而對類貝塞爾光束進行調制[97]. 這些光束具有接近貝塞爾函數的橫向場分布,它們在保持光束主瓣的情況下以可控的軌跡傳輸,如圖10所示. 圖10(b)展示了使用這種光束以拋物線軌跡驅動和運輸酵母細胞. 這種自加速光束使粒子能越過障礙物運動,在生物學和膠體科學中有廣泛的應用.
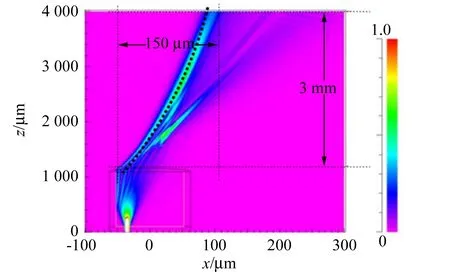
(a)數值模擬光束傳播圖
4.5 粒子/細胞自組裝
捕獲和組裝多個粒子或細胞對于多種應用領域具有重要意義,包括一般的生物光子器件[98-99]、細胞間相互作用和通信[100-101]、組織工程[102-103]和遺傳工程[104]. 由于光纖光鑷實現的捕獲是無創且精確的,它在粒子/細胞捕獲和組裝領域具有巨大的潛在應用價值.
基于單模光纖探針的粒子/細胞排列與自組裝如圖11所示. 圖11(a)展示的是不同尺寸的SiO2顆粒形成不同粒子數的粒子圖案(一維鏈和二維陣列),且粒子形成的圖案可在三維空間中進行控制[103];圖11(b)為利用光纖探針對葉綠體的一維鏈式或二維陣列式排列[99];圖11(c)是利用粒子自組裝的生物波導對紅細胞進行雙向傳輸[101]. 這種多細胞捕獲和細胞排列為控制細胞間的接觸提供了靈活的方法,對研究細胞間的相互作用和通信有著重要意義.
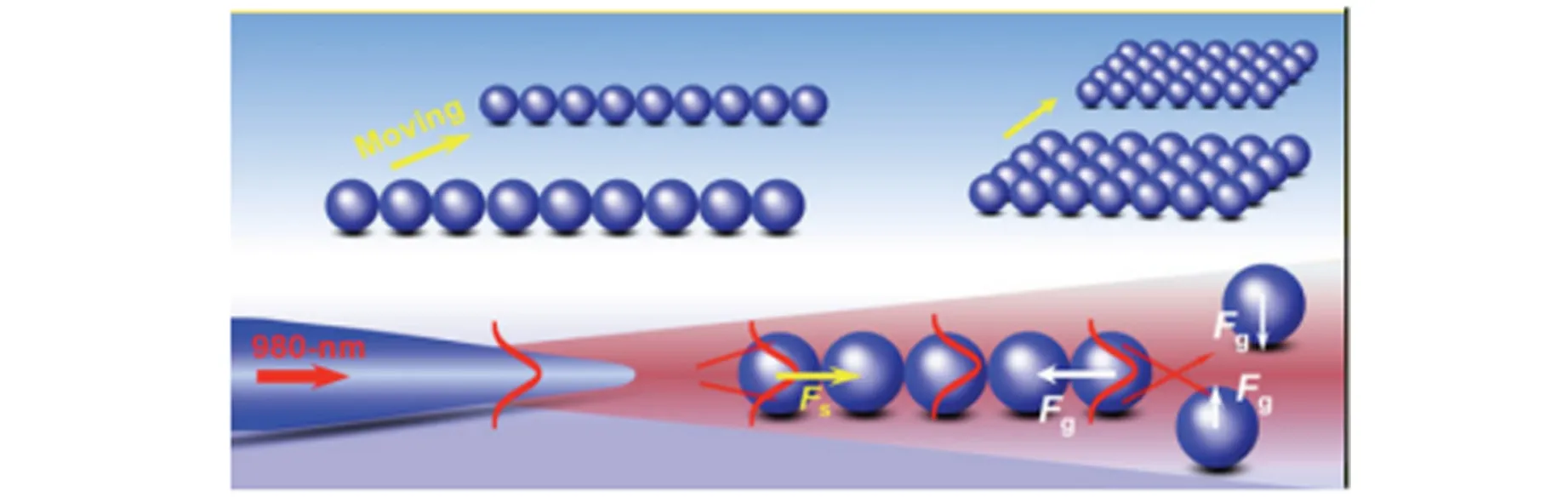
(a)SiO2顆粒形成不同粒子數的粒子圖案(一維鏈和二維陣列)[103]
5 光纖光鑷技術用于光波粒二象性演示實驗
在系統研究光纖光鑷的基礎上,哈爾濱工程大學物理與光電工程學院將光鑷這一前沿的科研成果及時與本科物理實驗教學相結合,提出將光纖光鑷用于光波粒二象性的演示實驗裝置[105]. 演示實驗通過單光纖對標準粒子的操縱展示光的輻射壓力和光子作用,證明光的粒子性. 另外,該演示實驗利用光纖探針的反射光與被捕獲粒子表面反射光的雙光束干涉證明光的波動性. 由于雙光束干涉光譜與被捕獲粒子運動狀態相關,而粒子運動狀態由光輻射壓力控制,由此證明光的波粒二象性.
5.1 基于光鑷技術的波粒二象性演示實驗的基本原理
5.1.1 光的粒子性
根據愛因斯坦的光量子假說[106-107],光是由光子組成的,光子的能量與其頻率成正比,由此可得
式中,h是普朗克常量,λ是波長.基于愛因斯坦的質能方程,對于任何運動的物體都可用
式中,E是能量,p是動量,m0是靜止質量,當靜止質量為零時,每個光子的動量p=E/c.照射在物體上的光束可看作是1組具有動量的連續光子如圖12(b)所示,通過這種方式,光子將動量傳遞給物體,并產生穩定的壓力,即光輻射壓力. 當粒子在軸向上所受的重力、浮力和光輻射壓力達到平衡時,粒子處于平衡狀態. 若保持光纖位置不變,在不同的光功率下,粒子會在不同的平衡點被捕獲,且光源功率越大粒子平衡點距離端面越遠,這對粒子的光學捕獲和位置調節可演示光的粒子性.
5.1.2 光的波動性
干涉與衍射是光波動性的典型現象[108-109],采用干涉方法可證明光具有波動性,如圖12(a)所示,光束在光纖端面的反射光(beam 1)與被捕獲小球表面的反射光束(beam 2)發生干涉. 利用1 550 nm激光源作為信號光,獲得beam 1和beam 2干涉光信號,如圖12(c)所示,通過記錄與測量粒子運動過程中的干涉信號可演示光的波動性.
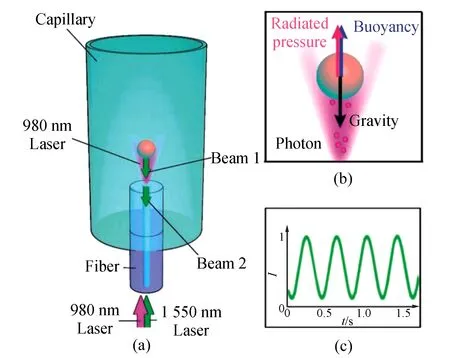
圖12 波粒二象性原理示意圖[105]
5.2 實驗裝置圖
光波粒二象性演示實驗裝置如圖13所示,利用波分復用器(WDM)將980 nm泵浦激光與1 550 nm檢測信號同時傳輸到光纖探針端面并作用于目標粒子上. 光纖端面反射光與目標粒子表面的反射光發生干涉,干涉光通過光纖環形器(OC),再利用光電轉換器將光干涉信號轉化為電信號,用數據采集卡呈現光干涉信號. 目標粒子的運動狀態亦可通過與CCD相連的電腦屏幕直接展示.
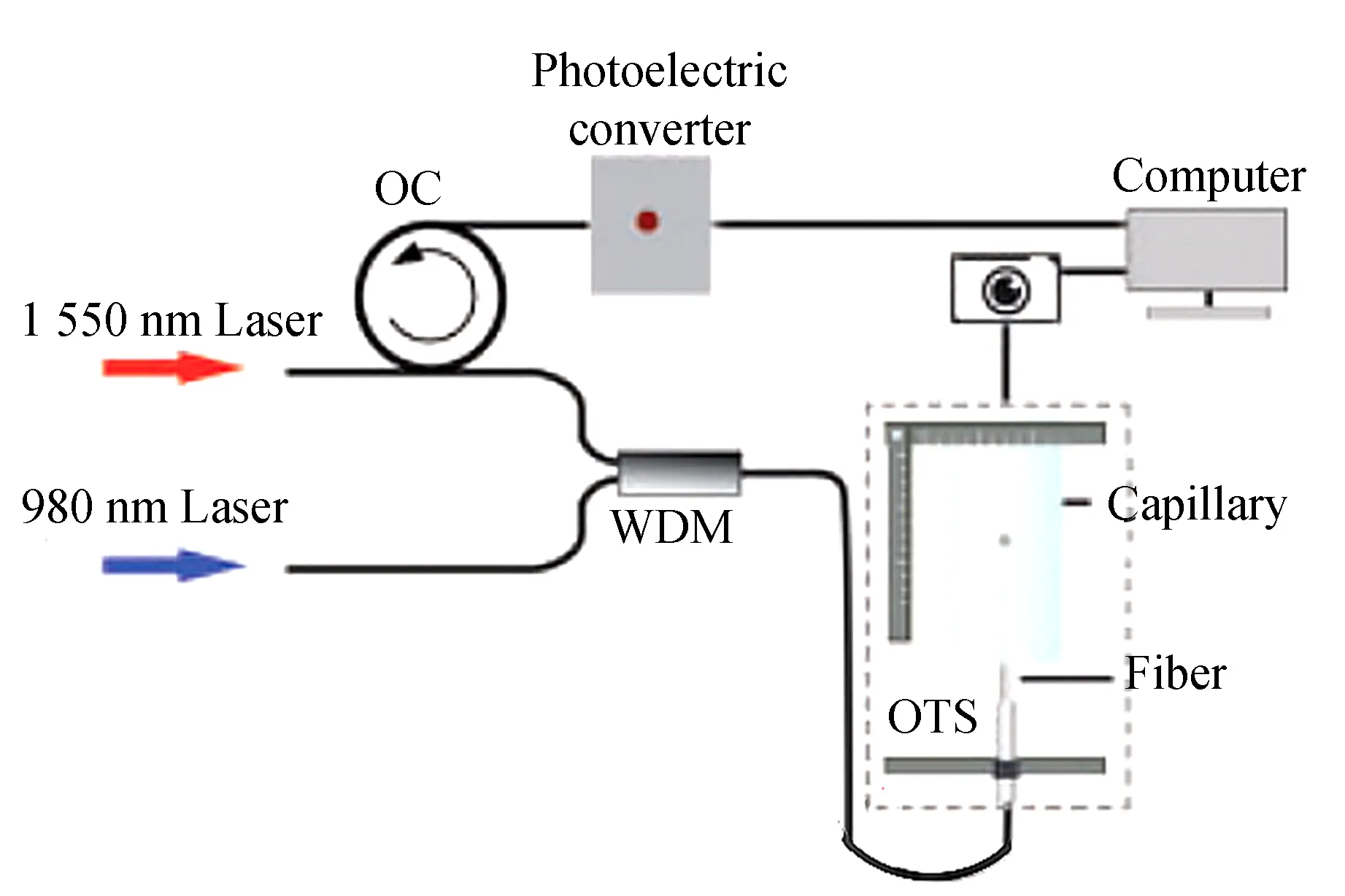
圖13 波粒二象性實驗裝置系統結構圖[105]
5.3 光的波粒二象性演示實驗
5.3.1 光的粒子性
在光纖探針對粒子實現捕獲后,只調整980 nm激光器功率,光纖探針不做任何移動,增加980 nm激光光功率,粒子被困在離探針更遠的位置,如圖14所示. 這表明:增大光強會增加被捕獲粒子所受的光輻射壓力,使之向上運動;減小光功率,粒子向下運動靠近光纖探針. 這個實驗明確說明了被捕獲粒子所受到的光輻射壓力,從而驗證了光具有波粒二象性中的粒子性.

圖14 通過不同的光功率強度得到不同的平衡位置[105]
5.3.2 光的波動性
當980 nm激光器光功率從1 mW直接增加到4.5 mW時,粒子瞬間獲得速度與加速度,開始向上移動,這里將粒子上升開始后的第2 s記為時間0 s,圖15(a)顯示了不同粒子狀態的圖像,圖15(b)是一些時間不連續的雙光束干涉譜線,圖15(c)顯示了被捕獲粒子的速度和加速度及其擬合曲線.
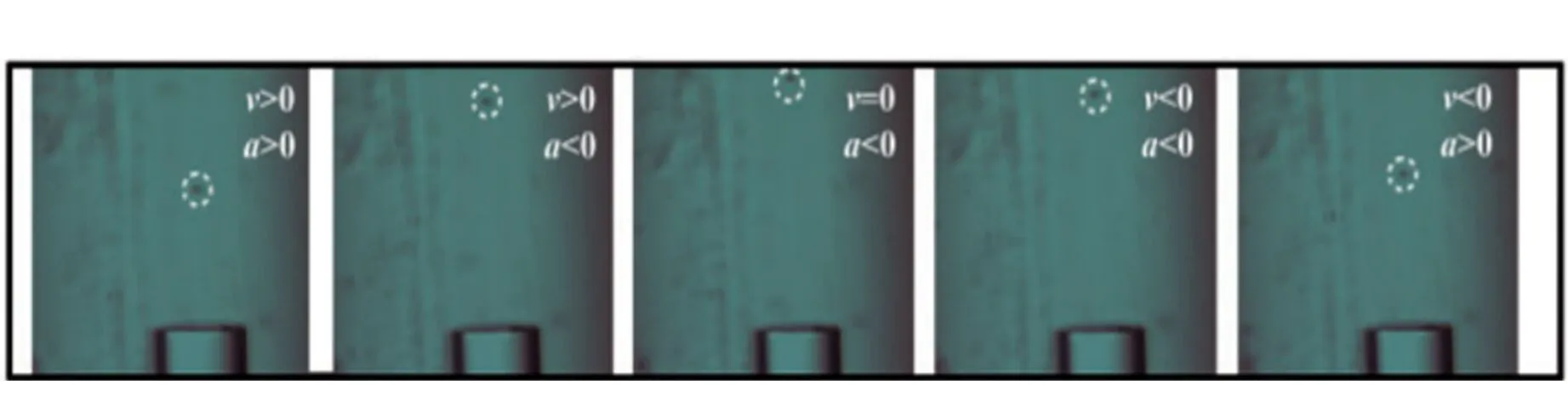
(a)展示各種粒子狀態圖像
圖15(a)可得,干涉譜頻率的減小說明加速后粒子的上升階段速度減小,被捕獲的粒子在離纖維末端面越遠時,受到的光輻射壓力越小,在此期間,作用在粒子上的總向上力逐漸減小到零,此時粒子上升到足夠高的平衡位置. 隨后,980 nm的泵浦激光被關閉,粒子在約73.5 s時開始下落. 可以看到,在粒子下落的過程中,干擾信號的頻率增加,粒子的速度增加. 由于粒子的雙光束干涉譜與粒子的運動狀態相關,而粒子運動狀態由光輻射壓決定,因此通過以上實驗證明了光的波粒二象性.
光纖光鑷演示實驗很好地從實驗上解釋了光的波粒二象性,使光學專業的學生對光學的基本概念有較好的理解. 同時也讓學生熟悉了基本的光學儀器和器件,可以提升他們對物理實驗的興趣.
6 結束語
本文綜述了近年來光纖光鑷在微觀光學粒子操縱方面的研究進展,利用微結構多芯光纖的多功能光鑷實現對粒子的多種形式操縱,利用單模光纖模式實現對粒子的功能性操作以及利用調制的全光纖貝塞爾光束實現全能型光纖光鑷. 介紹了光纖光鑷對目標粒子的捕獲、旋轉、輸運、振動等操作,列舉了光纖光鑷技術在溫度傳感、染料激光器、粒徑測量和粒子輸運等領域的應用,并探討了光纖光鑷技術與大學物理實驗相結合的光波粒二象性演示實驗的研究性教學. 基于光纖的光鑷系統易于控制,是實現細胞研究、生命科學探索和光學微裝配的強大工具. 各種類型的光纖光鑷在物理化學、細胞分選、生物醫學等領域的應用,表明光纖光鑷在探索微觀世界中的重要作用. 光纖光鑷技術為多學科多領域的協同合作提供了新的研究方法.