光電智能醫療垃圾搬運車設計
2021-07-27 03:48:14李野
電子元器件與信息技術 2021年5期
李野
(齊齊哈爾工程學院,黑龍江 齊齊哈爾 161000)
0 引言
本設計采用新能源的形式,智能垃圾搬運車具有自主尋跡、自動避障、自動卸載等功能。本項目最終實現醫療垃圾的自動搬運,實現醫療垃圾與人無接觸,減少交叉感染的可能性。該垃圾搬運車能夠按照預定軌跡行駛,到達固定的醫療廢品回收點后,將已經收集好的廢棄醫療垃圾進行卸載[1]。
1 研究的目的與意義
在疫情這個特殊時期,我們曾看到湖北一位女護士因搬送數噸醫療垃圾而暈倒。大量使用醫療用品的同時會產生大量的醫療垃圾,目前搬送垃圾主要靠人,所以,需要設計一款智能醫療垃圾搬運車,做到無接觸式的醫療垃圾運輸,減少傳染源,減少醫護人員的工作量,盡可能保護一線醫療工作者。
2 國內外研究現狀
2.1 國外研究現狀
在智能小車的研究領域中,世界上第一臺智能車輛是由美國成功開發的,它是第一臺擁有自動引導車輛系統的小車,能夠實現無人駕駛。2014年,美國頒布了《美國智能交通系統(ITS)戰略規劃(2015-2019年)》,該規劃由美國交通運輸部與美國智能交通系統聯合項目辦公室共同提出,該戰略計劃的核心就是汽車的智能化與網聯化,這兩項技術將會成為美國解決交通系統問題的關鍵技術手段。
美國對智能車的研究一直是以市場力量為主導的,由美國相關的汽車企業完成對智能汽車的研究與發展,政府為其搭建平臺,經過雙方的共同努力完成智能車的設計。智能小車最顯著的特點就是無人駕駛,近幾年,無人駕駛在政策和技術上都有著重要的發展。2018年,美國發布了《準備迎接未來交通,自動駕駛汽車3.0》,這個文件是繼2016年美國發布全球首個自動駕駛指導政策之后,更新的第三版關于發展和管理自動駕駛汽車的指導性政策。本次政策最大的特征就是以開放的姿態擁抱無人駕駛時代的到來。在當今世界,自動駕駛技術發達的國家制定法規已不是新鮮事。最早提出無人駕駛概念的德國在2017年5月通過首部關于自動駕駛的法律法規,同年9月德國聯邦交通運輸部的倫理委員會研究提交了世界上第一份自動駕駛指導原則。自動駕駛技術發達的日本也在2016年和2017年發布或修訂了數項關于自動駕駛的交通法規。
2.2 國內研究現狀
我國從20世紀80年代末,才開始了對于智能小車的研究,經過三十多年的不斷研究和發展,我國也取得了若干階段性的勝利成果。1992年,國內第一輛無人駕駛汽車在國防科技大學研制成功,標志著我國在無人駕駛汽車技術上取得了豐碩的成果。清華大學研制的V型智能汽車能夠在各種狀況復雜的道路上行駛。
ZDB-1型自動搬運車、基于無人駕駛技術的清潔能源電動游覽車、基于圖像識別自動引導的智能小車、CITAVT型自主導航車、智能機器人“亮亮”、智能服務機器人等都是我國在智能小車領域中取得的階段性成果,這些智能小車具有巡跡、避障、語音識別、圖像識別、自動跟蹤等功能,豐富了我國智能小車的研究項目[2]。
3 整體方案設計
采用STC89C52型號單片機作為光電智能醫療垃圾搬運車的主控制器。它的優點是:①小巧輕便;②操作簡單,容易修改寫入的程序;③低功耗等。
光電智能醫療垃圾搬運車的底盤采用金屬底盤,堅固穩定,使光電智能醫療垃圾搬運車的穩固性能大大提高。在人機接口開關中采用的是機械彈性開關,使用的是按鍵式接口。同時設計三個LED燈顯示運行狀態[3]。
驅動系統不僅要提供光電智能醫療垃圾搬運車的動能而且要保證公交車的平穩。采用四輪驅動,利用小車的全部重量作為附著壓力,使附著力顯著增加,減少輪胎磨損。選擇L293D作為電機驅動芯片,L293D是著名的SGS公司的產品。L293D屬于單塊集成電路,該集成電路的特點如下:①高電壓高電流;②四通道驅動,設計用來接收DTL或者TTL邏輯電平;③繼電器、直流電機、步進馬達和開關電源晶體管構成驅動感性負載,電機驅動模塊如圖1。

圖1 光電智能醫療垃圾搬運車電機驅動模塊
紅外線接收裝置用于識別醫療費品回收點,測量醫療費品回收點的頻率。其具有體積小,功耗低,功率強,成本低的特點。光電醫療垃圾搬運車有一對用于紅外信號發射和接收的二極管,發射二極管發射某個特定頻率的紅外線信號,接收二極管需要接收這種固定頻率的紅外線信號。在光電智能醫療垃圾搬運車行駛過程中,在小車前端設置的紅外信號發射二極管在固定路線的行駛中發射出固定頻率的紅外線信號,當接收二極管接收到從障礙物反射回來的紅外信號時,核心單片機將進行分析處理,然后通過數字傳感器接口返回分析結果。因此可利用光電智能醫療垃圾搬運車接收到的紅外線信號來判斷周遭的環境是否發生了變化[4]。
醫療費品回收點采用紅外線發射裝置發射信號,所以站點檢測設備采用紅外線接收裝置。智能小車通過發射紅外線并檢測紅外線有無被反射來確定前方是否存在醫療費品回收點。在檢測到醫療費品回收點后,則停車對醫療垃圾進行卸載[5]。尋跡裝置以單片機控制為核心,用紅外傳感器,電機等設備進行尋跡控制。操作安裝簡單快捷,性能高效,紅外尋跡模塊示意圖如圖2所示。
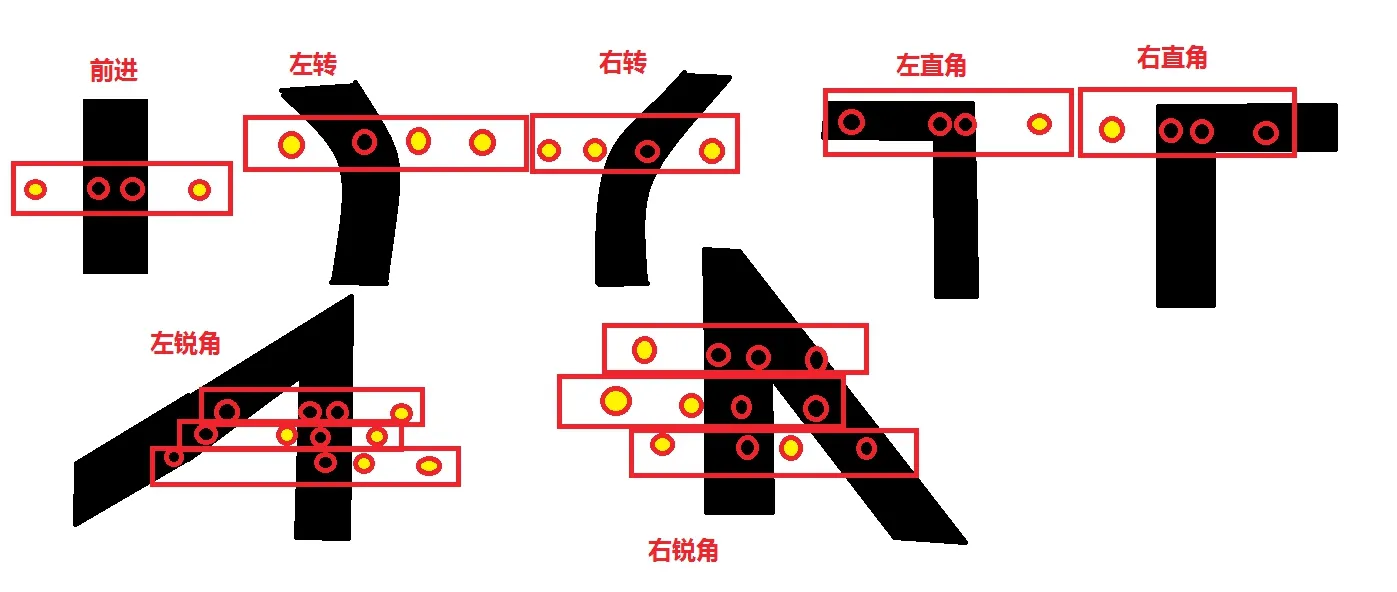
圖2 紅外尋跡模塊示意圖
避障設備用于躲避路途中的障礙。決定采用紅外線避障系統,反應速度快捷。把紅外線避障系統安裝在車頭,提高靈敏性。為了節省時間成本,供電方式直接選用鋰電池即可,它的優點是便宜節能、壽命長、綠色環保。
紅綠燈識別裝置用于識別路途中的紅綠燈,紅燈停車綠燈行駛。其包括有信號接收器、信號識別器和信號轉換器等,可精準識別路途上的信號,及時停車,及時啟動。光電醫療垃圾搬運車通過發射紅外線并檢測有無紅外信號被反射來確定醫療費品回收點在前方是否存在。檢測到醫療費品回收點后,光電醫療垃圾搬運車停止前行啟動醫療垃圾的卸載;反之光電醫療垃圾搬運車繼續向前行駛[6]。整套系統提高了光電醫療垃圾搬運車的智能性,光電醫療垃圾搬運車的組成框圖如圖3所示。
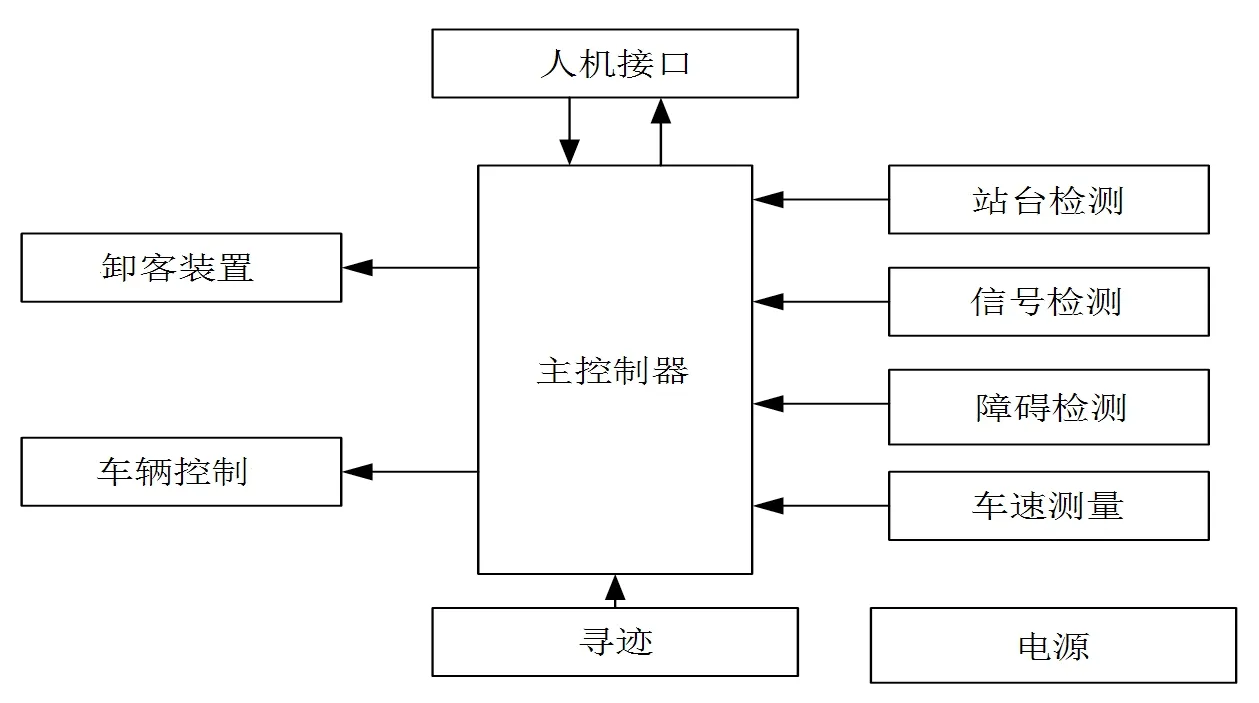
圖3 光電智能醫療垃圾搬運車組成框圖
4 結論
該光電醫療垃圾搬運車能夠按照預定軌跡進行行駛,到達固定的醫療廢品回收點后,將已經收集好的廢棄醫療垃圾進行卸載。首先要從指揮站獲取需要停靠的醫療廢品回收點的具體信息,要在醫院內規定好光電醫療垃圾搬運車行駛的路線,讓光電醫療垃圾搬運車沿著固定路線行進,在已經規劃好的路線上行駛,規劃好的路線中有固定的醫療廢品回收點,小車檢測到醫療廢品回收點的光電信號后,停車并且卸載垃圾,等待進一步的處理。該光電醫療垃圾搬運車在運輸醫療垃圾時,遇到隨機障礙物可以隨時停車避讓,例如遇到醫院內的工作人員,途中突然出現的物品等。當光電醫療垃圾搬運車到達指定的醫療廢品回收點后,通過光電醫療垃圾搬運車上的圓盤裝置完成對醫療垃圾的卸載工作。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國生殖健康(2019年3期)2019-02-01 06:12:26
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
