手術機器人輸出反饋技術專利分析綜述
2021-07-27 03:48:14王麗娜趙玉航
電子元器件與信息技術 2021年5期
關鍵詞:手術
王麗娜,趙玉航
(國家知識產權局專利局專利審查協作江蘇中心,江蘇 蘇州 215500)
0 引言
如今外科手術機器人由于其高度的精準性,已經得到了外科醫生的廣泛認可,已經在神經外科、腹外科、普通外科等領域得到了廣泛的應用[1]。目前外科手術機器人系統多數采用主從位置控制,使機器人從手跟隨主手的運動以完成手術操作[2],最大的局限之一就是外科醫生缺乏操作的手感,即力覺和觸覺反饋,這增加了手術的不確定性和風險性。因此,手術機器人手術過程中,具有良好的輸出反饋,以確保手術操作的精確性和靈活性,同時還要增加現實感和真實感,以及確保病人的安全,是至關重要的。
1 專利申請整體狀況分析
通過對檢索到的全球范圍專利申請進行分析(檢索截止2020年8月),得出全球范圍手術機器人輸出反饋技術專利申請的申請時間(年份)的分析如圖1所示。
從圖1可知,早在上世紀80年代,已有國外公司開始進行手術機器人研發,并對人機交互輸出反饋技術進行申請相關專利進行保護。上世紀90年代直至本世紀初,此時手術機器人處于初始萌芽期,相應的全球手術機器人輸出反饋技術申請量較少。2005-2015年為手術機器人的成長期,此時全球手術機器人輸出反饋技術也開始增多。近年來,隨著醫療機器人的技術研究和產品開發持續推進,手術機器人是醫療機器人范疇中占比最大也是最重要的領域,自2015年開始,全球手術機器人輸出反饋技術的申請量呈現快速增長趨勢,說明當前手術機器人仍為當前的研發熱點[3-4]。
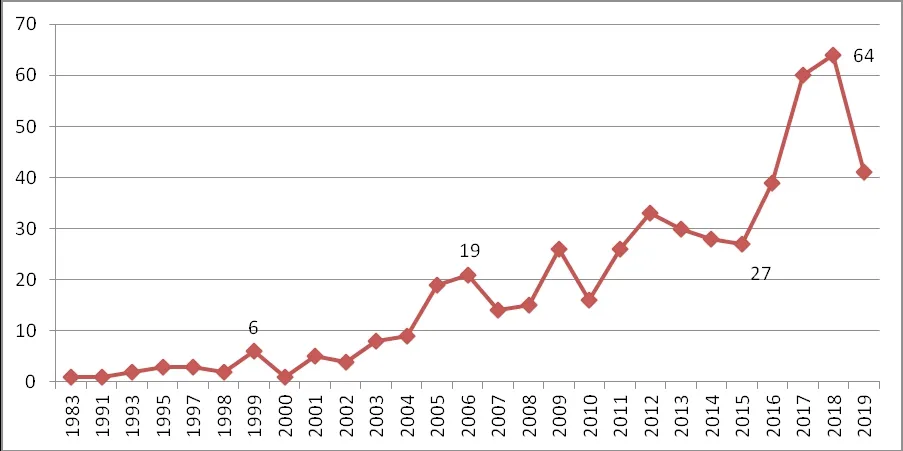
圖1 全球專利申請的年度趨勢
圖2顯示了全球的申請量排名前10位的申請人,以及申請來源區域分布。
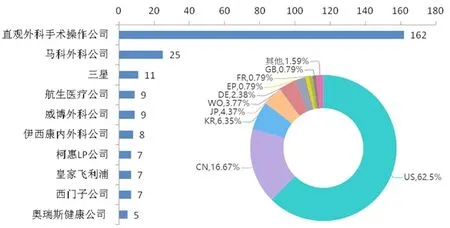
圖2 全球主要申請人及申請來源區域分布
從圖2可知,全球的專利申請量上60%來自美國,其次為中國、韓國、以及WO申請,這表明了美國在手術機器人輸出反饋技術上處于優勢。另外,全球的申請量排名前10位的申請人都是國外申請人,其中直觀外科手術操作公司的專利申請數量較其他申請人相差一個數量級,該公司的達芬奇作為唯一得到FDA認證的手術機器人,幾乎壟斷全球市場。
2 專利技術分支分析
針對本文所檢索到的全球專利申請,可將目前手術機器人輸出反饋技術分為視覺、力覺、觸覺幾大類,如圖3所示。
各技術分支的占比如圖3所示,由圖中內環可見,視覺反饋占據了63%,其次為力覺24%,觸覺11%,其他方式2%。其中,根據視覺反饋信息處理方式可以細分為2D顯示、3D顯示、AR/VR顯示、全息投影以及其他視覺反饋輸出,各細化技術分支的占比如圖3中外環所示,由圖可見,2D、3D、AR/VR、全息投影的占比依次遞減,這是因為以上視覺顯示方式的信息處理成本是依次遞增的[5]。
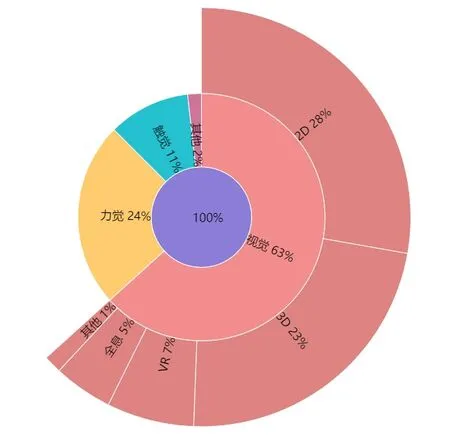
圖3 手術機器人輸出反饋技術分支分布
圖4示出了各技術分支的逐年申請趨勢。由圖可知視覺反饋的是輸出反饋的重要來源,而力覺反饋自2015年以來開始有明顯增長,而觸覺反饋的申請則比較平穩。
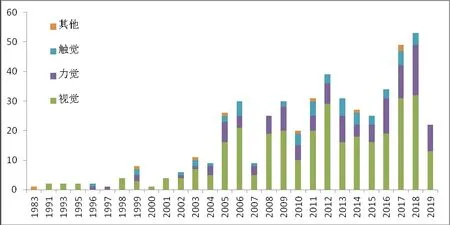
圖4 手術機器人輸出反饋技術分支逐年申請趨勢
圖5示出了視覺反饋技術分支逐年申請趨勢。由圖可知視覺反饋中2D和3D是視覺反饋的主要申請來源,兩者每年的申請量相差不大,自2015年以來,AR/VR、全息等反饋開始有明顯增長。
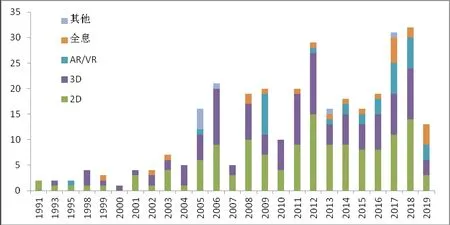
圖5 手術機器人視覺反饋技術分支逐年申請趨勢
3 結論
從以上對手術機器人輸出反饋技術的分析,可以看出手術機器人輸出反饋技術在隨著科技的發展而不斷發展。人機交互與輸出反饋須充分考慮醫生的需求和臨床應用場景,為實現“更逼真、更精準”,從而降低手術過程中的不確定性和風險性,將力反饋與觸覺反饋相結合提高手術的現實感,以及高清成像顯示技術提供更準確的定位、成像功能,是手術機器人輸出反饋技術研發的重點方向[6-7]。
猜你喜歡
環球時報(2022-12-23)2022-12-23 09:28:37
昆明醫科大學學報(2022年1期)2022-02-28 07:45:04
中老年保健(2021年11期)2021-08-22 03:13:36
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
河北畫報(2020年10期)2020-11-26 07:20:50
小學閱讀指南·低年級版(2017年1期)2017-03-13 20:07:35
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
中國醫療美容(2015年1期)2015-07-12 10:06:38
鄭州大學學報(醫學版)(2015年2期)2015-02-27 14:50:54
西南軍醫(2014年5期)2014-04-25 07:42:48
