基于人工勢場的無人機集群協同對抗問題研究
2021-07-30 01:12:10張佳樂裴志明
南方農機 2021年14期
楊 皓,張佳樂,裴志明
(長安大學工程機械學院,陜西 西安 710054)
0 引言
隨著無人機技術與人工智能技術的發展,新一代人工智能技術與自主技術快速走向戰場[1-3],使得無人機協同作戰成為可能,多無人機間的協同攻防對抗逐漸成為未來空戰的重要模態[4]。
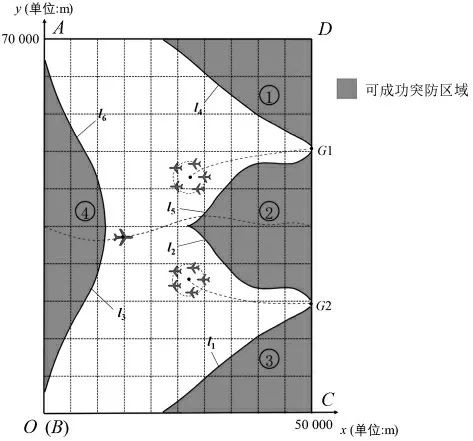
課題小組討論的對抗區域如圖1所示,在圖1所示的矩形區域ABCD內,攻擊縱深即BC之間的距離為L=50 km,通道帶寬即AB之間的距離為M。藍方作為進攻方,旨在突破紅方無人機的攔截成功抵達目的地。紅方作為攔截方,在給定的區域內阻止藍方的突防。可知當藍方突防無人機與紅方至少兩架無人機的距離均小于R=300 m時,就認為紅方成功攔截了藍方突防無人機。且紅方任何相鄰兩架無人機的間距相同,紅方任何兩架無人機的間距需大于30 m,每一架無人機與本集群中至少兩架無人機的距離不超過200 m,紅方運載機的速度為V紅=300 m/s,轉彎半徑不小于1 000 m,紅方無人機的速度為VP=200 m/s,最小轉彎半徑為RP=350 m。此外,紅方運載機與所屬無人機集群中至少一架無人機的距離不超過10 km,與任何一架無人機的距離需大于100 m,同時為安全需要,與藍方的突防無人機的距離需大于5 km。藍方無人機需在360 s內越過邊界CD,否則視為突防失敗。藍方無人機的速度為VE=250 m/s,最小轉彎半徑為RE=500 m。在整個追擊對抗過程中,紅藍雙方無人機的速度保持不變,運動的方向可根據機動策略的需要隨時改變,但受轉彎半徑的限制。
如圖1所示,假設紅方兩個無人機集群的起始圓周中心分別位于半徑為100 m的G1和G2處,其中DG1=20 km,G1G2=30 km,CG2=20 km。試建模分析藍方無人機處在ABCD內哪些位置,可使得紅方無人機無論采取什么追擊策略,都無法阻止藍方的突防,并找到藍方無人機相應的最優突防策略。
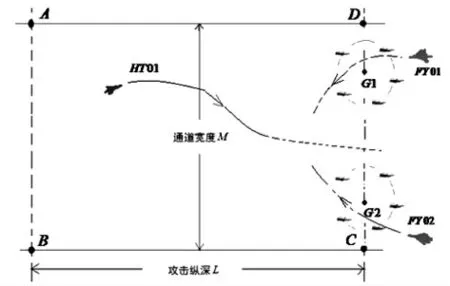
圖1 紅藍雙方無人機協同對抗示意圖
1 問題分析
問題要求在規定的時間內以及滿足相應攔截規則的條件下,建模分析出藍方無人機處于矩形ABCD內哪些位置時,無論紅方無人機集群怎樣協同攔截,藍方無人機總能找到相應策略實現成功突防。由于問題要求是在平面區域內同一高度進行協同對抗,且雙方無人機的速度保持不變,速度方向可根據機動策略進行隨時改變。因此,考慮將該問題轉換為物體在速度勢場中吸引與排斥問題。問題解決思路流程如圖2所示,步驟概括如下。

圖2 問題解決思路流程圖
1)根據紅藍雙方無人機在對抗中的速度、轉彎半徑以及規則要求,將至少兩架紅方無人機與藍方無人機之間的距離,簡化為紅方無人機集群中心點距藍方無人機之間的距離。
2)確定紅藍雙方無人機所處的排斥勢場與吸引勢場,建立人工速度勢場模型,基于在MATLAB環境中通過枚舉法確定出藍方無人機可以成功突防的伊始點坐標。
3)調用MATLAB中CFtool工具箱,對上述伊始點的坐標進行基于最小二乘法的多項式曲線擬合,確定出藍方無人機能成功突防的具體區域,根據仿真結果對比獲得藍方無人機的最優突防策略。
2 人工速度勢場模型建立與求解
2.1 攔截模型簡化
根據已知條件,當藍方突防無人機與紅方至少兩架無人機的距離均小于300 m時,認為紅方成功攔截了藍方突防無人機。同時,假設紅方無人機集群時刻處于“最優攔截隊形”,即集群中總有兩架無人機時刻保持與藍方無人機距離相同。由條件可知,紅方無人機集群圓周半徑為100 m,則攔截時刻紅藍雙方無人機位置關系如圖3所示。根據幾何關系,計算得此時藍方無人機與紅方無人機集群圓周中心(后文簡稱集群中心)的間距,近似為lmax=375 m。此后,在討論能否成功攔截的問題時,只需判斷藍方無人機至集群中心的距離是否小于lmax即可。因此,后續可利用集群中心點Fi(i=1,2,…,n)來表示運載機所發射的集群。
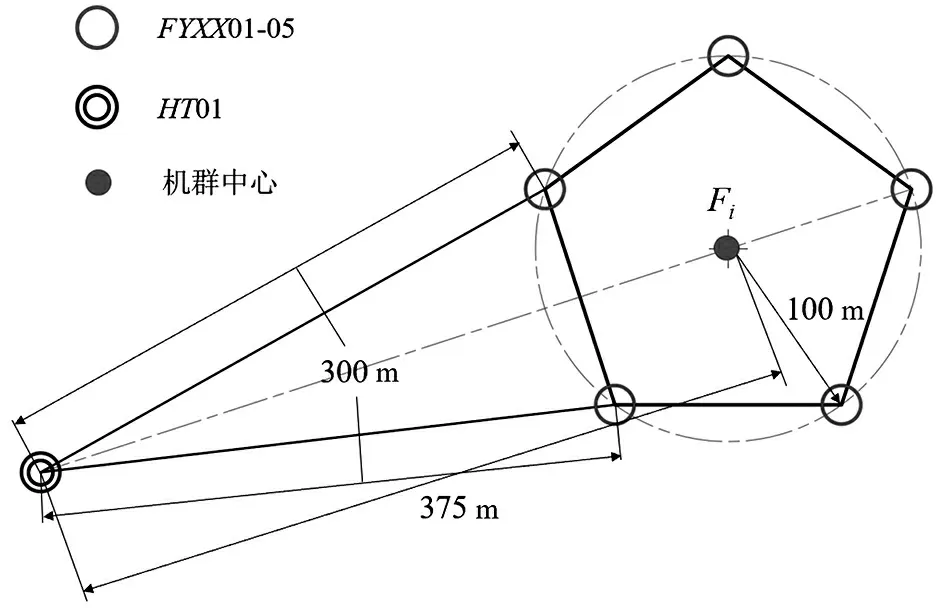
圖3 紅方無人機集群簡化模型示意圖
2.2 人工速度勢場模型的建立
人工勢場法是由Khatib提出的一種比較常用的局部路徑規劃算法,本質上為一種反饋控制策略,對控制和傳感誤差有一定的魯棒性,常用于無人機的路徑規劃中[5-9]。課題小組基于人工勢場的思想,提出一種基于人工速度勢場的突防模型與攔截模型,即無人機某一方向上速度的大小直接受其與吸引、排斥勢場源距離的影響。
對藍方無人機來說,由于其突防路徑不可超過矩形區域ABCD的上下邊界,因此,由矩形的上下邊界AD、BC與紅方無人機集群共同為其提供速度排斥勢場,由矩形右邊界CD為其提供速度吸引勢場,速度排斥勢場不斷逼使藍方無人機遠離邊界AD與BC,速度吸引勢場則使得藍方無人機朝著CD邊線方向不斷靠近。對紅方無人機來說,由于軌跡不受邊界ABCD限制,故僅由藍方無人機為其提供速度吸引勢場,使其不斷向藍方無人機靠近進行攔截。同時,可通過調整速度吸引、排斥勢場中的參數,實現雙方無人機突防策略或追擊策略的改變。由于雙方無人機處于移動狀態,造成速度勢場源隨時改變,使得不同位置處的速度勢場同樣在隨時改變,進而導致作用在雙方無人機上的場強大小具有隨動性,因此,可稱該突防—追擊策略為隨動策略。具體建模過程如下。
如圖4所示,以點B為原點,BC方向為x軸正方向、BA方向為y軸正方向建立平面坐標系xOy,由已知條件知 圖 中 各 點 坐 標 為A(0,70 000)、B(0,0)、C(50 000,0)、D(50 000,70 000)、G1(50 000,50 000)、G2(50 000,20 000)。設藍方無人機HT01坐標為H(x1,y1),其廣義速度坐標為;紅方運載機FY01發射的無人機集群中心坐標為F1(x2,y2),其廣義速度坐標為;運載機FY02發射的無人機集群中心坐標為F2(x3,y3),其廣義速度坐標為。
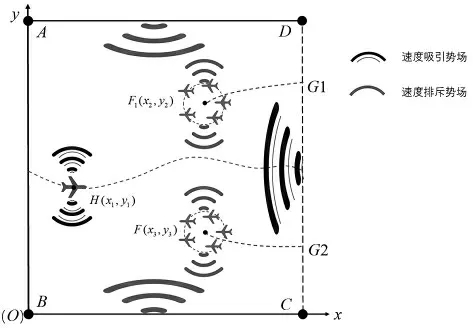
圖4 人工速度勢場示意圖
利用人工勢場思想,結合已知數據,建立雙方無人機的速度表達式,即突防、攔截隨動策略表達式。
①建立H在x、y方向上的速度表達式。
令其在y方向上的速度表達式為:

其中,V12、V13、V1AD、V1BC分別為由F1、F2、邊界AD以及邊界BC對其產生的速度排斥勢場,通過分段規劃方法及線性映射思路推導獲得,其相應公式為:
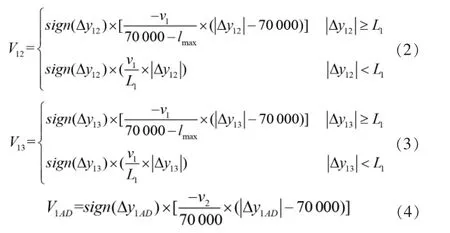

由于H速度大小要求保持不變(VE=250 m/s),即有因此,其由邊界CD提供的x方向上速度吸引勢場可由如下公式表示:

②建立Fi在x、y方向上的速度表達式。
以F1為例,為實現追擊攔截,其運動方向需朝向H,如圖5中所示,此時有:
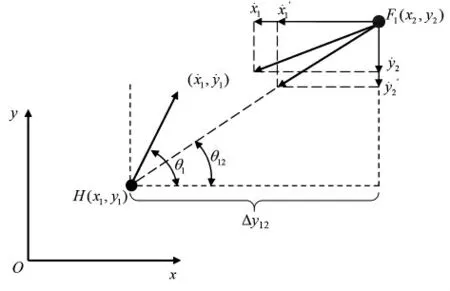
圖5 F1速度分解示意圖
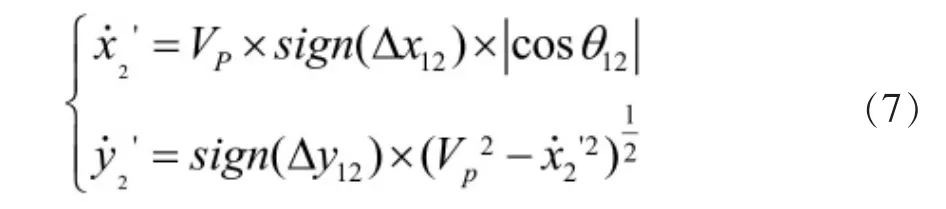
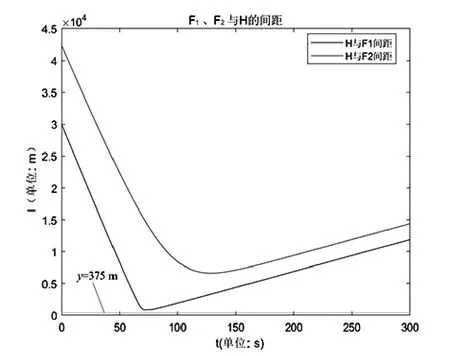
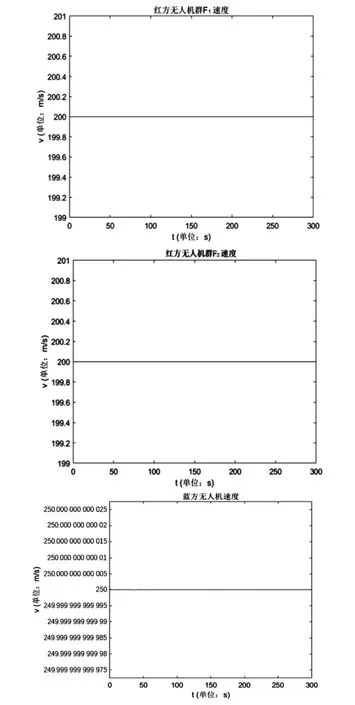
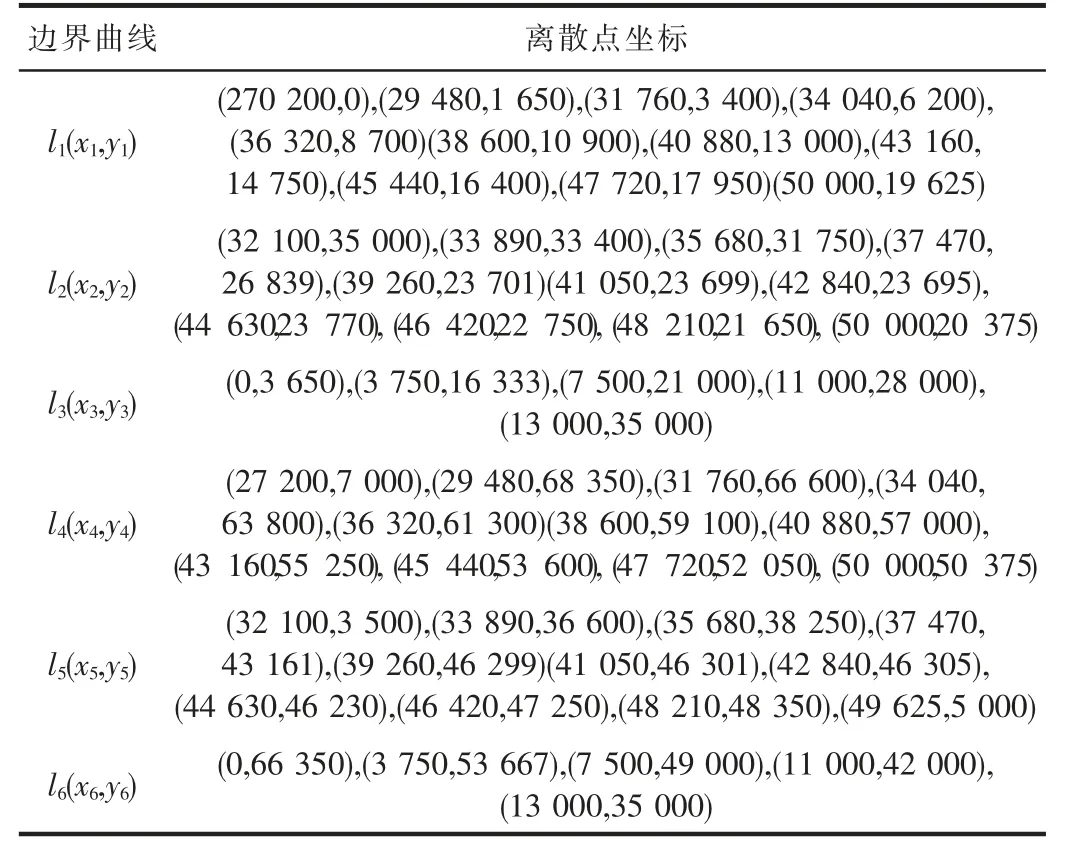
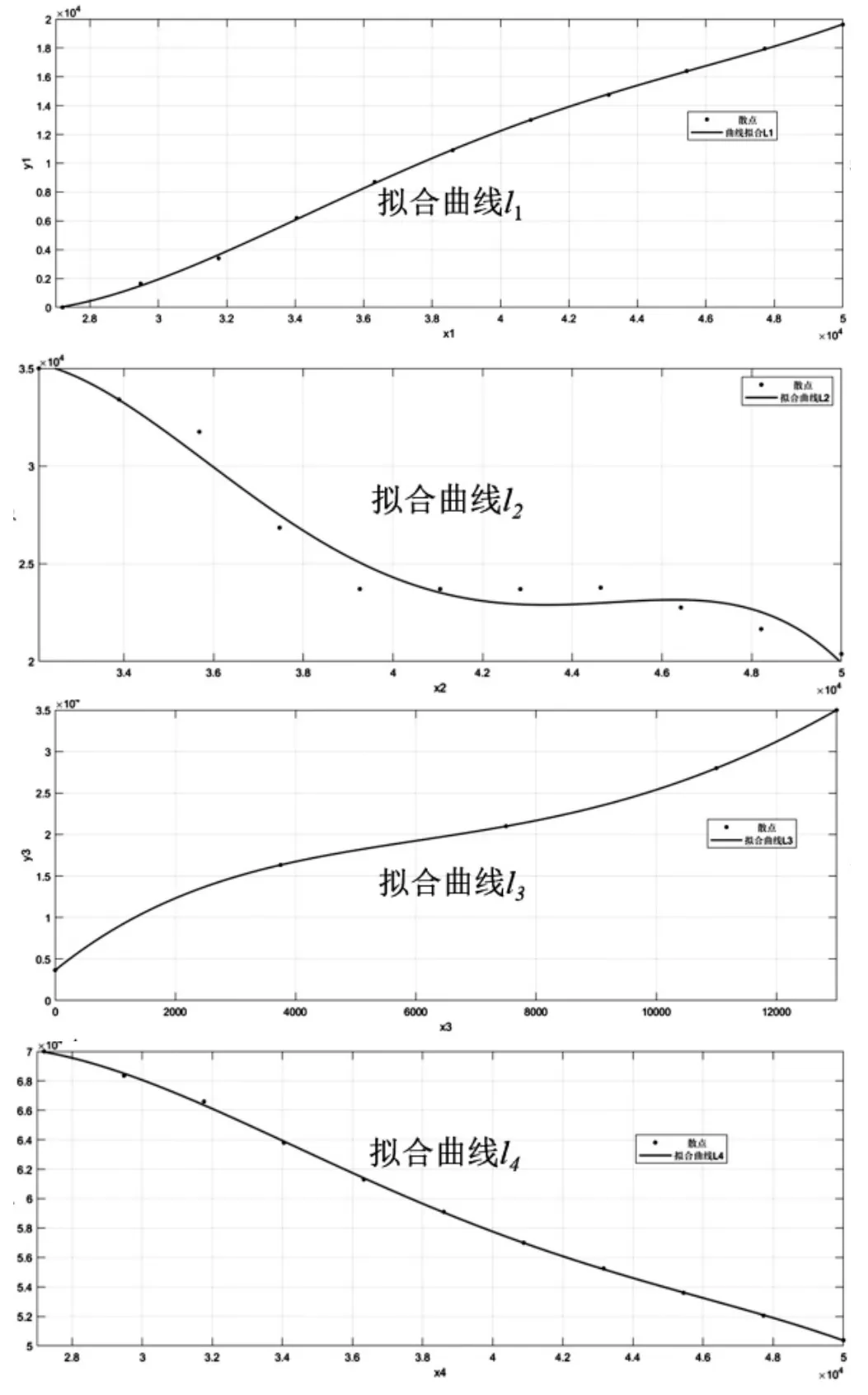
但結合實際考慮,由于Vp 同理,F2的速度表達式為: 由于該速度勢場模型中具有多個可調參數,同時運用求解動力學微分方程的思想,可保證紅藍雙方無人機各自的運動軌跡依據對方位置實時進行調整,具有良好的隨動性。 由2.2中模型可寫出該突防—追擊模型的運動學方程為: 其初值為: 利用MATLAB中ode45函數對由式(11)、式(12)構成的運動學方程進行求解,并輸出360 s內的仿真結果,同時實時輸出F1、F2與H的間距值: 由2.1中的簡化模型可知,在t<360 s時,若出現l12或l13的值小于lmax(375 m),則證明本次攔截成功。當藍方無人機初始位置為時,選取不同勢場參數時程序輸出結果如圖6、圖7所示。 圖6 某一勢場參數下藍方無人機成功突防示意圖 圖7 改變勢場參數后藍方無人機遭遇攔截示意圖 由圖6、圖7可知,在藍方無人機初始位置相同的情況下,勢場參數的選取影響著藍方無人機能否突防成功, 勢場參數的不同代表著突防策略與攔截策略的不同。 如圖8所示,從左至右分別為H、F1、F2速率隨時間變化的曲線。由圖可知,在仿真過程中,系統時刻滿足給定的速度條件(VE=250 m/s、Vp=200 m/s),保證了模型的正確性。 圖8 紅藍雙方無人機速度檢驗 為獲得H總能成功突防的起始位置所構成的區域,利用枚舉法,通過改變H的起始位置以及可調參數v1、v2、b、L1及L2,進行大量自動仿真,獲得H剛好運動至邊界 CD處時成功突防的H起始位置散點圖,如圖9所示。 圖9 可成功突防區域邊界散點圖 各離散點坐標如表1所示。 表1 各邊界離散點坐標 根據表1中數據,利用CFtool工具箱進行基于最小二乘法的四次多項式函數曲線擬合[10],分別得到如圖10所示的6條藍方無人機總能成功突防的起始位置所構成區域的邊界。 圖10 六段散點曲線擬合結果 將6條擬合曲線繪制在同一坐標系下,得到藍方無人機總能成功突防的初始位置區域,如圖11所示。 圖11 可成功突防初始位置區域示意圖 其中,l1-l6六條曲線的表達式分別為: 其所包圍的區域①、②、③、④,即為無論紅方無人機采用什么樣的追擊策略,藍方無人機總能成功突防的初始位置區域。 同時,對不同勢場參數下的突防仿真結果對比可得,當藍方無人機所處y方向上的速度勢場相關參數取值為v1≈82.5,v2≈100,L1≈4 000時,為藍方無人機相應的最優突防策略。 本課題組首先對突防過程中雙方無人機的相對位置進行了幾何分析,將對抗模型作簡化處理;而后基于人工勢場的思想,以紅藍雙方無人機為研究對象,建立了人工速度勢場模型,為使雙方無人機具有不同的突防、攔截策略,在該模型中引入了四個可變的勢場參數,提高了該模型的準確性與實用性;最后,基于MATLAB編程環境,利用枚舉法與最小二乘曲線擬合法確定出該速度勢場模型下藍方無人機總能成功突防的起始位區域;同時,對比分析不同勢場參數下的仿真結果可得,當藍方無人機所處y方向上的速度勢場相關參數取值為v1≈82.5,v2≈100,L1≈4 000時,為其最優突防策略。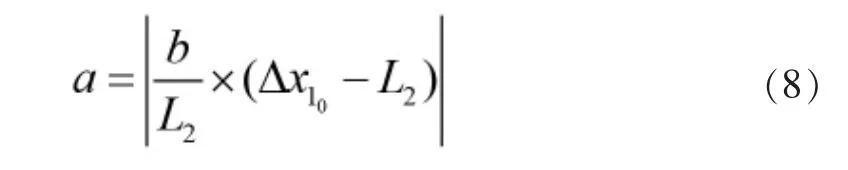


2.3 模型的求解與仿真





3 基于最小二乘法的多項式函數曲線擬合


4 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大世界(2018年1期)2018-04-12 05:39:14
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03