數字化相控陣天線遠場測試系統設計
2021-07-30 09:12:16吳文超賈守波王鵬飛孫階彪陳光緒
測控技術 2021年7期
關鍵詞:系統
吳文超, 錢 陽*, 賈守波, 王鵬飛,孫階彪, 陳光緒
(1.上海無線電設備研究所,上海 201108;2.上海神添實業有限公司,上海 201108)
近年來,相控陣雷達技術逐步在眾多科技研究領域表現出旺盛的生命力,并已經廣泛應用到軍用和民用領域,同時,數字技術也取得了迅猛的發展,數字相控陣天線逐漸成為主流軍用雷達關鍵組件。數字相控陣天線因其具備高搜索速率、高多普勒分辨率和角分辨率、高抗干擾能力和同時多功能等優勢,正在成為相控陣雷達的一個新的發展方向[1]。
目前,數字相控陣天線測試通常在暗室中進行,通過矢量網絡分析儀進行方向圖測試[2-3],以獲取天線的真實性能。傳統數字相控陣天線測試系統采用非標轉臺等專用機構,測試過程一般為半自動測試,需要人工干預,并且測試軟件系統功能相對簡單,面對數字化相控陣天線的大量測試任務,測試效率不足已開始阻礙相控陣天線研制與應用進程。
相控陣天線測試需要天線在輻射范圍中完成一次運動過程和儀器儀表數據采集過程,運動過程耗時長,較大程度地制約了相控陣天線測試速度。相控陣天線測試效率的提升,關鍵在于實現多通道、多波束[4]測試以及高效的數據傳輸、處理過程[5],行業內也在不斷研究[6-8]。例如,袁婕[9]、王耀華[10]基于一種層次架構模塊化系統,提出了多任務測試功能實現多個頻率與波束的測試,但未對測試時序控制進行優化研究,并且系統不包含測試時外圍其他模塊的控制,實際使用時仍顯不足。
提出了一種新型數字化相控陣天線遠場測試系統,介紹了相控陣天線的測試系統搭建、測試系統設計、測試方法和時序設計,對測試系統軟硬件技術方案進行了詳細論述。軟件系統是測試系統的關鍵部分,整個測試系統被劃分為總控模塊和子模塊,子模塊可獨立運行,通過數據流與總控模塊進行通信進而實現控制,測試過程中模塊間的調用關系通過配置文件定義。系統具有完整的全自動化測試功能,并且測試過程可通過配置文件進行靈活拓展,具有較好的通用性。通過對測試系統的實測驗證表明,本系統能夠較大程度地提高測試效率,對相控陣天線的研制和應用具有較大的實際意義。
1 測試系統構成
測試系統布局如圖1所示,空間分布有射頻子系統、供電子系統、機械子系統、散熱子系統和測試控制軟件系統。數字化相控陣天線是一種有源相控陣天線,對于有源相控陣天線測試,為了避免相控陣天線TR組件中低噪放工作于飽和狀態,即要求處于線性工作狀態,通過調整矢量網絡分析儀的輸出功率,使得系統信噪比達到預期要求。另外,為了相控陣天線姿態控制更加靈活并保證足夠的精度,采用六軸工業機器人作為輔助相控陣天線運動的轉臺。
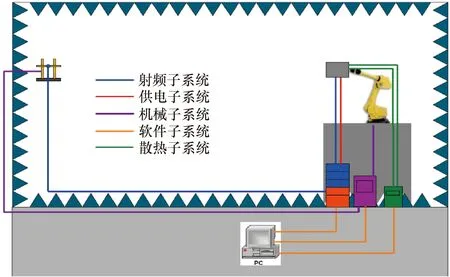
圖1 天線測試系統布局示意圖
常用的天線測試方法有遠場測試、近場測試和緊縮場測試等[11]。論述的數字化相控陣天線測試系統工作在分米波段,這使得遠場方向圖測試可在暗室中進行,不受外界環境的電磁干擾,而且可以全天候工作,不受天氣的影響。
圖2是測試系統布局模型示意圖。在進行接收信號測量時,為了保證接收(TR)組件的飽和工作狀態,需要調整信號強度,將在矢量網絡分析儀信號源輸出端接入功率放大器,保證掃描架喇叭探頭處的輻射信號的電平值滿足要求;在進行發射信號測量時,為了保證相控陣天線發射(TR)組件的飽和工作狀態,將在矢量網絡分析儀信號源輸出端接入功率放大器。注意,為了保證器件、儀表不受損壞,矢量網絡分析儀接收端以及天線發射端要按需決定是否接入衰減器。
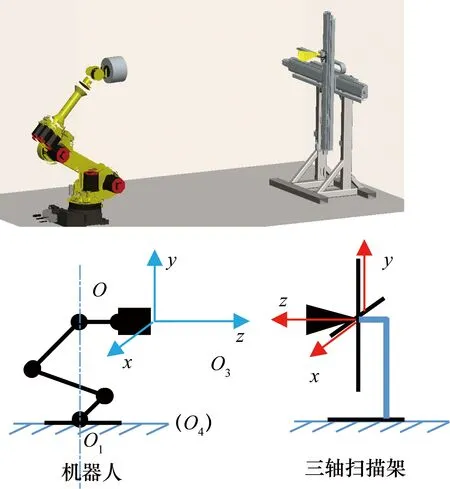
圖2 測試系統布局模型示意圖
相控陣天線測試系統硬件框圖如圖3所示,系統主要包括測試工控機、矢量網絡分析儀、功率放大器、水冷機、機器人、掃描架、供電電源、串口服務器、網絡交換機等設備。
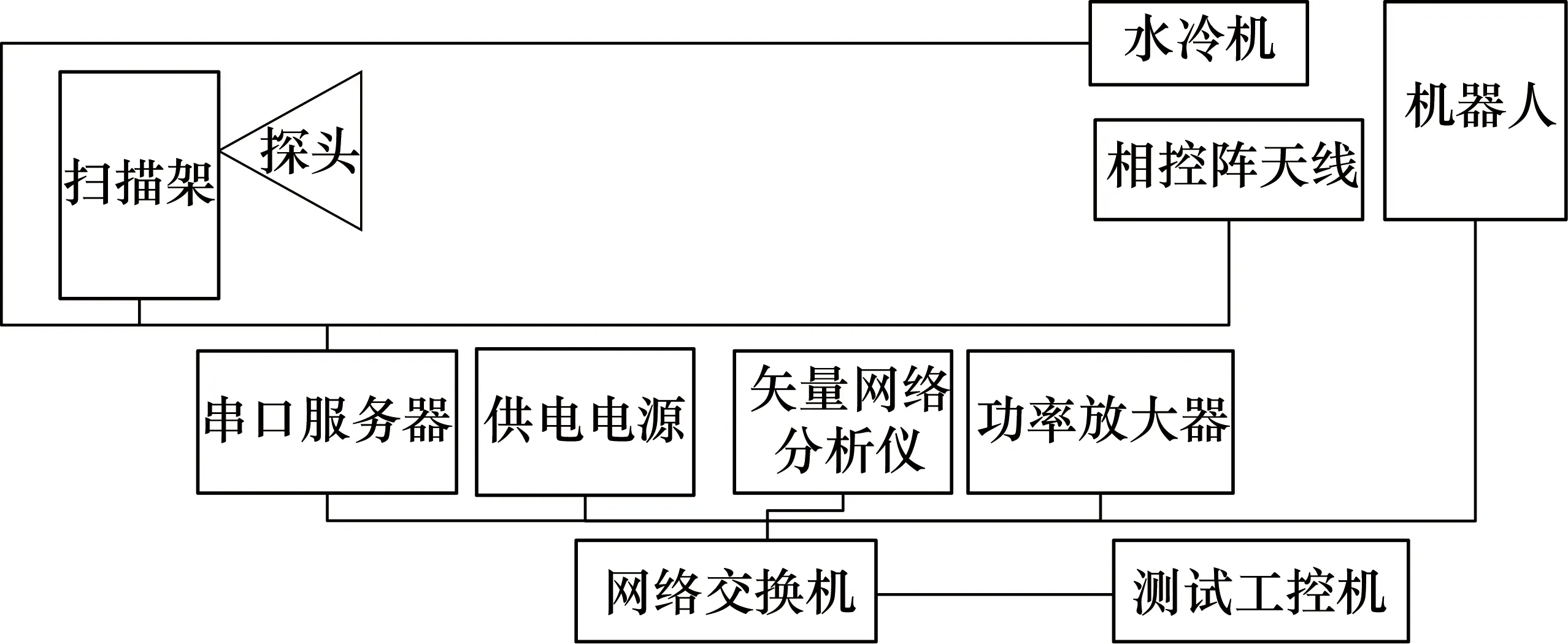
圖3 系統硬件框圖
2 測試系統設計
在實際的相控陣天線遠場測試過程中,天線的測試工藝流程非常復雜,測試任務量也極其巨大。往往需要對天線在不同收發狀態下,測試多個頻率點、多個波束的方向圖。普通的遠場測試系統無法滿足工程化的測試需求,必須使用可以對天線同時進行多頻點、多波束方向圖測試的相控陣天線多任務測試系統[9]。多任務天線測試系統的硬件組成更加復雜,軟件功能更加強大,通用化程度也更高。
2.1 系統設計
所謂多任務測試系統,是指機器人帶動相控陣天線陣面單次掃描預定的方向圖角度區間的過程中,可以測試多個頻率點、多個波束、多個加權、多個通道的天線方向圖。因此,本測試系統必須實現相控陣天線陣面移動、狀態切換和測試數據采集的實時同步控制。在進行測試前,測試人員將天線需要測試的所有頻率點、波束指向等測試任務信息在測試系統界面進行設置,測試開始后,機械臂每到一個測試點,依次控制天線波控模塊切換狀態并對矢量網絡分析儀進行觸發采集,并不斷循環直到該點位處天線所有狀態的數據都采集完畢,最后通過測試系統處理后實時顯示測試過程不同狀態時的方向圖。
2.2 軟件設計
數字化相控陣天線測試系統軟件作為整個測試系統所有任務功能的最終體現,是整個測試系統開發的關鍵。系統軟件架構如圖4所示。設計上將測試系統切分為若干可獨立運行的子模塊,以便于子模塊同步運行執行任務,同時方便調試開發和拓展。子模塊由業務調度模塊統一管理,最后由測試系統主控模塊進行數據和指令的輸入輸出。
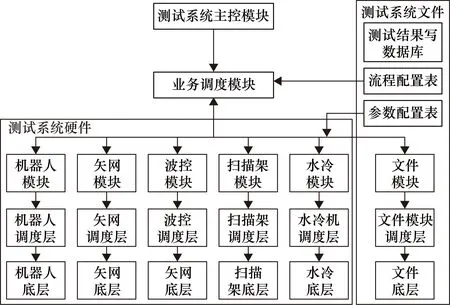
圖4 軟件設計架構圖
系統由主控模塊、業務調度模塊、機器人模塊、矢量網絡分析儀模塊、波控模塊、電源模塊、水冷機模塊、文件模塊等組成。主控模塊負責信息輸入和輸出功能,業務調度模塊負責接收主控模塊指令,根據流程配置表以及參數配置表生成子模塊調度隊列調用子模塊執行功能。子模塊有機器人模塊、矢量網絡分析儀模塊、波控模塊、電源模塊、掃描架模塊、水冷模塊和文件模塊。機器人模塊負責機器人控制和機器人狀態獲取、矢量網絡分析儀模塊負責設置矢量網絡分析儀參數、觸發和讀取矢量網絡分析儀的測量數據,波控模塊負責控制相控陣天線完成信號狀態切換,電源模塊負責供電電源參數設定和狀態監控,掃描架模塊負責掃描架運動控制和狀態讀取,水冷模塊負責水冷機參數設置、控制和狀態監控,文件模塊負責配置文件的讀取、保存以及測試數據的保存。軟件交互界面如圖5所示。
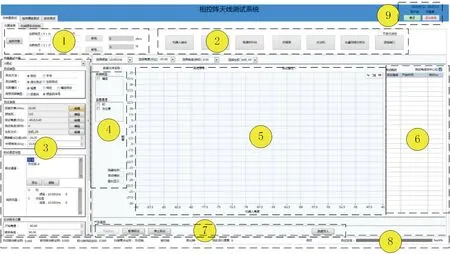
圖5 軟件交互界面
圖5中,軟件交互界面共包含9個區域:① 快捷操作及監測區;② 子模塊界面操作區;③ 測試參數設置區;④ 測試數據顯示選擇區;⑤ 測試數據顯示區;⑥ 測試點位置耗時顯示區;⑦ 測試操作區;⑧ 系統狀態欄顯示區;⑨ 用戶登錄區。
3 測試方法
以暗室遠場測試為例,給出相控陣天線方向圖的測試方法。數字化相控陣天線測試系統通過發送波控指令信號,控制相控陣天線的工作狀態,測試過程中控制機器人和掃描架的運動,再由矢量網絡分析儀進行測試所用到的信號發生和測試數據的采集,并得到相控陣天線信號的方向圖測試結果。
3.1 發射方向圖測試
在遠場對相控陣天線進行發射方向圖測試時,相控陣天線處于發射狀態。測試過程中,源信號由矢量網絡分析儀產生,經過功率放大器放大后,輸送到天線以準備進行發射,信號經過空間傳播后通過探頭進行接收,再經由衰減器衰減后接入矢量網絡分析儀進行采集。測試系統控制機器人和掃描架探頭移動到每個測試位置,通過天線的波控模塊間接控制天線發送信號的方位角、俯仰角以及信號頻率和天線模式,并對矢量網絡分析儀采集到的信號進行讀取和記錄,最終得到天線的發射方向圖。
3.2 接收方向圖測試
在對天線進行接收方向圖測試時,相控陣天線處于接收狀態,探頭處于發射態。在每個測試位置,測試探頭將微波信號向天線陣面輻射。相控陣天線接收信號后通過同軸電纜送給矢量網絡分析儀。測試過程中,控制系統控制機器人以及掃描架探頭移動到每個測試位置,通過相控陣天線波控模塊控制天線接收信號的方位角、俯仰角以及信號頻率和天線模式,并對矢量網絡分析儀采集到的信號進行讀取和記錄,最終得到天線的接收方向圖。
3.3 具體測試步驟
相控陣天線的發射測試和接收測試具有相同的流程,其測試方法的差異主要在信號回路連接和波控指令上。發射和接收方向圖的測試流程相同,如圖6所示。
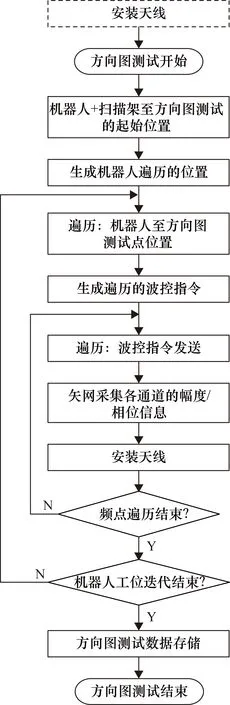
圖6 發射/接收方向圖測試流程圖
3.4 測試時序設計
測試效率是本系統的一個關鍵指標,系統在測試時應該在滿足測試要求的前提下盡可能將子設備的動作時間進行重疊,以7波位單頻點測試為例,時序圖設計如圖7所示。可以較大程度地節省機器人坐標發送時間和波控指令的執行時間,以達到提高測試系統效率的目的。
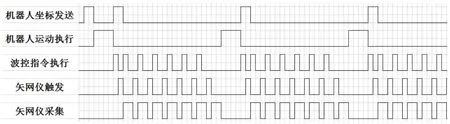
圖7 時序圖設計
測試開始后,系統執行機器人坐標發送,并控制機器人運動到測試需要的位置,機器人運動到位后,系統執行波控指令,并在波控指令執行完成后將矢量網絡分析儀進行觸發,觸發完成后隨即執行下一次波控指令。在機器人運動到位后,系統會同時將下一次測試需要的位置發送給機器人,以節省下一次機器人運動前發送坐標期間的等待時間;在矢量網絡分析儀觸發完成后,由于矢量網絡分析儀已經得到了測試數據,其后進行波控指令執行不會影響已有測試結果,因此在系統從矢量網絡分析儀中采集數據的過程中,同時執行下一次波控指令,以節省下一次矢量網絡分析儀觸發前波控指令的執行時間。
4 測試結果與分析
數字相控陣天線的工作頻率范圍通常比普通模擬相控陣天線寬很多,其方向圖測試任務量也往往數倍于普通天線。因此,多任務測試系統的應用更加具有實用意義。經過大量實驗驗證可以發現,數字化相控陣天線測試系統能夠保證近似的測試精度,并且大范圍提高當前相控陣天線測試效率。
4.1 重復測試精度
通過對某型號相控陣天線實際測試為例進行分析,對相控陣天線進行了測試對比,取多個方位波束角、單頻點進行測試,其中3次結果的對比如圖8所示。
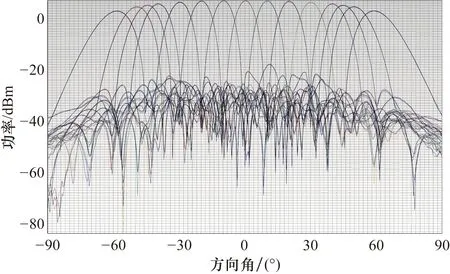
圖8 測試重復性對比
由圖8中的比對數據可以確認,測試系統方向圖重復測試3 dB波束帶寬最大差異約為1.2%,副瓣抑制最大差異約為1.5%,測試精度基本一致。
4.2 測試效率
通過對某型號相控陣天線實際測試為例進行分析。相比于市場上已有的同類方案,在不同的測試參數下,效率均有較大提升,最大為60%。具體數據如表1所示。
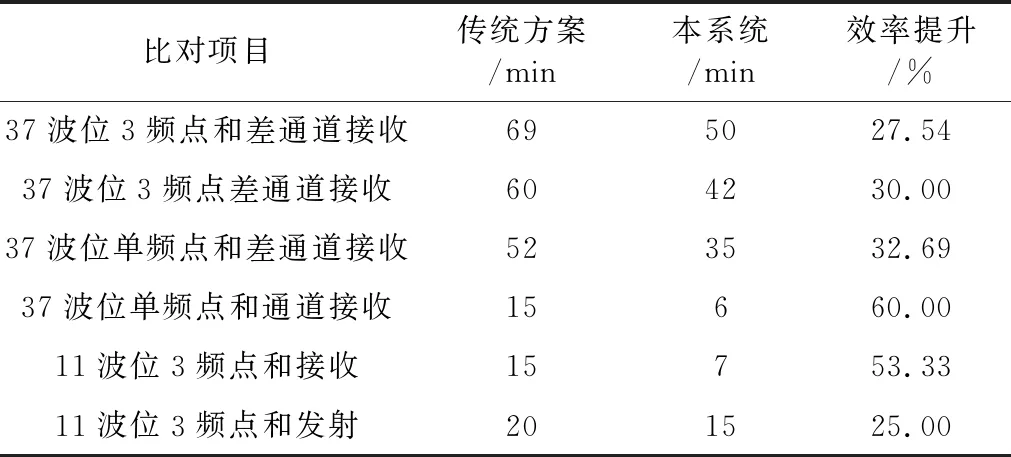
表1 相控陣天線測試系統測試效率對比
5 結束語
本文論述的數字化相控陣天線測試系統集成方案和天線測試方法經過了多個型號、不同頻段的數字式相控陣天線實際測試的應用,結果表明天線的測試效率和精度滿足相控陣天線的測試要求。這種新型數字化相控陣天線測試系統測試精度較好,有效提升了天線的測試效率,能夠推動相控陣天線的研制與應用進程。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32