煤礦工作面超前預警模型與系統實現
2021-08-02 07:40:26田廣宇林澤東
軟件導刊 2021年7期
田廣宇,林澤東
(山東科技大學計算機科學與工程學院,山東青島 266590)
0 引言
當前,為滿足大量煤炭能源需求,煤炭開采深度逐漸加深。我國多數煤炭能源來自于深層開采[1],煤礦開采強度和開采深度增加,加上我國煤礦地質條件復雜,導致煤礦開采難度增大,危險系數進一步提高,煤礦沖擊地壓災害發生的強度和頻率也隨之增加[2]。煤礦事故一旦發生,將嚴重威脅井下工作人員的生命安全,因此解決煤礦智能化開采和智能化工作面預警是一件十分重要的任務。現代化、智能化、無人化的智能煤礦預警平臺開發以及建立綠色、安全、可靠、高效的現代化智能化煤礦系統將是未來發展的方向和趨勢[3]。煤礦產業的改革與創新,促使煤礦產業從機械化、自動化,逐漸向智能化發展,但由于我國煤層地質條件復雜,煤礦智能化仍處于初級階段。對于條件復雜的煤礦,煤礦智能化預警仍有許多技術問題需要攻克[4]。通過數字孿生以數字化形式在虛擬空間構建與物理空間相互映射的三維模型,能夠在虛擬空間模擬物理空間信息的動態趨勢。通過監控物理空間中的信息變化,可真實反映煤礦物理世界中的信息變化趨勢[5-11],從而實現對多元動力災害及各種危險源的超前預警預測。
1 相關工作
為實現煤礦智能化和工作面預警可視化,提高煤礦智能預警的人機交互能力,本文基于數字孿生技術,提出了煤礦工作面超前預警(Digital Twin Face Integrated Warning,DTFIW)系統的概念。通過物理預警模型、煤礦傳感器信息感知[12]、煤礦歷史運行數據,集成了多參數、多方法、多維度的數字孿生過程[13],在虛擬空間中完成映射達到實時預警、精確預警的目的。平臺以精準三維地質模型為基礎,以“實用礦山壓力理論”為指導[14],基于數字孿生技術結合計算機建模、可視化、大數據、機器學習等方法,融合物聯網技術、數據挖掘等技術實現煤礦多元動力災害,如微震、應力、礦壓等災害的超前預警,有效解決了對單一動力災害預警的不足,該系統主要用于對開采前方危險源和動力災害的超前預警分析。
根據實際地質信息建立物理模型是研究數字工作面超前預警的前提,通過數字孿生技術構建煤礦實體對象,實現對煤礦環境狀況及煤礦災害運動規律的分析;通過數字孿生技術對環境、煤層地質信息[15]、傳感器數據進行虛擬映射;通過建立物理模型對工作面的動態災害進行預警,運用控制理論設計物理模型[16]。在煤礦產業中,根據煤礦物理環境,基于數字孿生技術構建數字映射的仿真模型和虛擬監測監控[17-19],設計并實現一種基于數字孿生技術的煤礦工作面超前預警,用于對開采前方危險源[20-21]的綜合分析及超前預警。
2 二維超前預警實現方法流程
2.1 二維超前預警模型流程
二維空間下的超前預警流程如圖1 所示。①獲取預警左進尺和右進尺的進尺數;②獲取預警工作面開采眼左右坐標及預警工作面停采線左右坐標,計算出工作面的二維外包核;③外包核的作用是將工作面包裹起來,僅對外包核相交或在外包核內部的危險源(斷層、陷落柱、積水區、煤柱、采空區)進行預警,避免了對距離工作面很遠的危險源的預警,極大降低了計算效率;④根據定位系統獲取當前開采左右坐標及超前預警左右進尺的坐標,計算得到工作面預警區域;⑤通過判斷與該工作面外包核相交的危險源及外包核內部的危險源,計算得出工作面預警區域與危險源位置狀態、危險源類型、危險源名稱及落差;⑥通過預警模型計算出預警值。
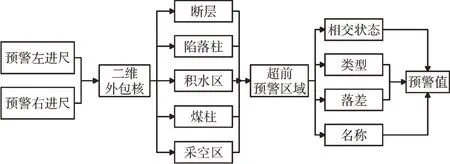
Fig.1 Two-dimensional space advance warning flow圖1 二維空間超前預警流程
2.2 二維超前預警計算模型
在二維模式下,根據工作面當前位置,判斷前方指定范圍內危險源的數量、參數,就危險源對工作面造成的安全風險水平進行評估。二維空間超前預警方法流程如圖2所示,當工作面開采到CD 位置,若預期前方50m 范圍內的危險源,陰影部分CDEF 四邊形便是預警區域,判斷CDEF區域內是否存在危險源,確定危險源的類型以及距當前工作面的距離,用來預測和評估未來推進過程中危險源對進度造成的影響,為煤礦安全態勢預警進行預警提示及報告。
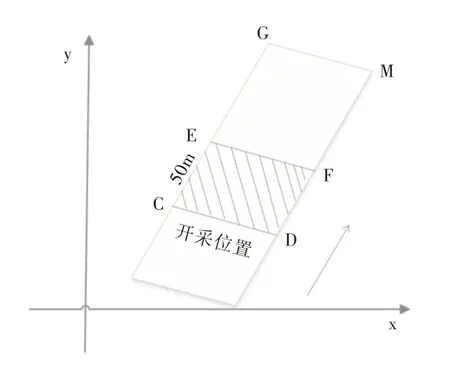
Fig.2 Two-dimensional space flow 1圖2 二維空間流程(1)
在二維模型下,根據工作面位置坐標計算出該工作面的最大值x坐標、最大值y坐標、最小值x坐標、最小值y坐標。將最小值x坐標、最小值y坐標組成A(xmin,ymin)點坐標,最大值x坐標、最大值y坐標組成B(xmax,ymax)點坐標。連接AB 兩點的對角線,可建立一個工作面的外包核,如圖3 中虛線部分的矩形。外包核可將工作面完全包裹在內,其作用是減少和避免不必要的計算。在實際的煤礦中有些工作面周圍存在許多危險源,通過外包核縮小了計算范圍,只需計算與外包核相交或在外包核內部的危險源。
如圖4 所示,5 個云朵分別代表5 個危險源(彩圖掃OSID 碼可見,下同),根據建立的工作面外包核可知,只需要對紅色、黃色、綠色3 個危險源進行預警與計算。2 個灰色的危險源并不在外包核內部且不與外包核相交的這種危險源不作計算,這樣避免了很多不必要的計算,極大提高了計算效率、節省了預警時間、優化了用戶體驗。下一步是計算CDEF 四邊形,主要計算CDEF 區域與外包核內或與外包核相交的危險源并進行預警與距離計算。
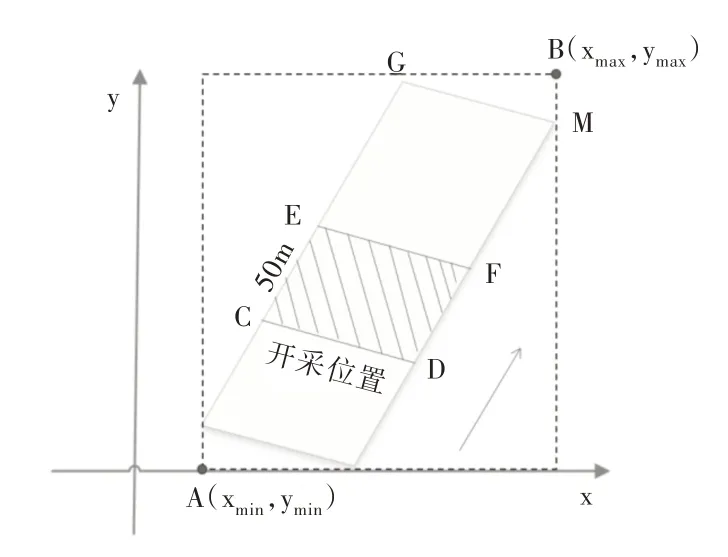
Fig.3 Two-dimensional space flow 2圖3 二維空間流程(2)
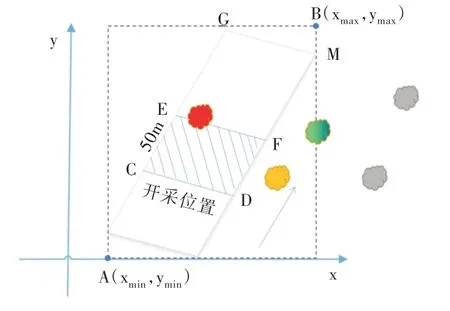
Fig.4 Two-dimensional space flow 3圖4 二維空間流程(3)
首先,計算陰影部分四邊形CDEF 的區域。根據實時定位系統可知C、D 兩點的坐標位置,以及停采線G、M 兩點的位置坐標。通過C、G 兩點的坐標,可計算直線CG 的斜率k,如式(1)所示。

通過斜率可知角θ 的值,默認推進工作面前方50m 的位置,可知CE 的距離為50。如圖5 所示。
將式(2)和式(3)聯立,求得CQ 和EQ 的值。根據直線CQ 的值及C 點坐標,求得Q 點坐標。根據直線EQ 的值及Q 點坐標,求得E 點坐標,同理可得F 點的坐標值。右C、D、E、F 4 點的坐標可確定四邊形CDEF 的區域。
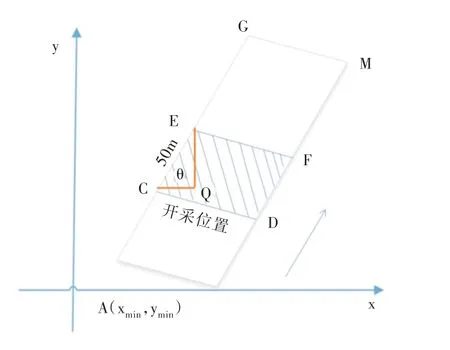
Fig.5 Two-dimensional space flow 4圖5 二維空間流程(4)
得到四邊形CDEF 區域后,則可計算出四邊形區域與外包核內及與外包核相交的危險源的位置關系與距離。對于距離地計算比較復雜,原理如下:首先獲取到危險源的周圍邊緣點,然后判斷該危險源的邊緣點是否在四邊形CDEF 區域內部。根據不同類型可分為以下3 種情況:①危險源中所有邊緣點都在CDEF 四邊形區域內;②危險源中部分邊緣點在CDEF 四邊形區域內,另一部分在四變形區域外;③危險源中所有邊緣點都不在CDEF 四邊形區域內。根據3 種不同的情況分別計算,可將此問題看作兩個多邊形是否相交的問題,實現方法如算法1 所示。
算法1:判斷兩個不規則多邊形是否相交
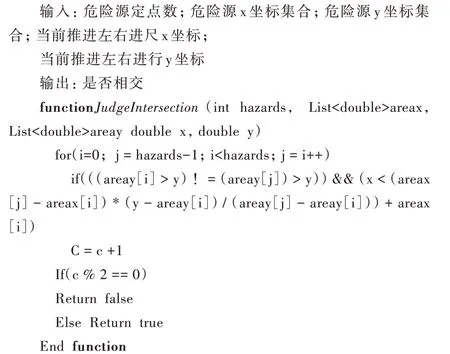
通過判斷多邊形是否相交的算法得出危險源與超前預警區域的位置關系后,進行距離計算。利用危險源的邊界點求出危險源的中心點坐標,通過四邊形4 個點的坐標求得四邊形的中心點坐標。通過歐氏距離計算出兩點間的距離,便是危險源到當前開采位置前方預警四邊形區域的距離,如式(4)所示。

3 三維實現方法流程
3.1 三維超前預警模型流程
三維空間下的模型,可從各角度方向查看預警信息,三維空間下超前預警流程如圖6 所示。①獲取超前預警范圍;②獲取預警工作面開采眼左右坐標及預警工作面停采線左右坐標,計算出工作面的三維外包核;③三維外包核是一個立方體,由于工作面的形狀大小不同,工作面的外包核也各不相同;④通過獲取超前預警范圍,計算得到工作面預警區域;⑤對與三維外包核相交及三維外包核內部的危險源進行預警,得出工作面預警區域與危險源的位置狀態(上方不相交、下方不相交、預警區域內部、預警區域相交)、危險源類型、危險源名稱及落差;⑥通過預警模型計算出預警值。
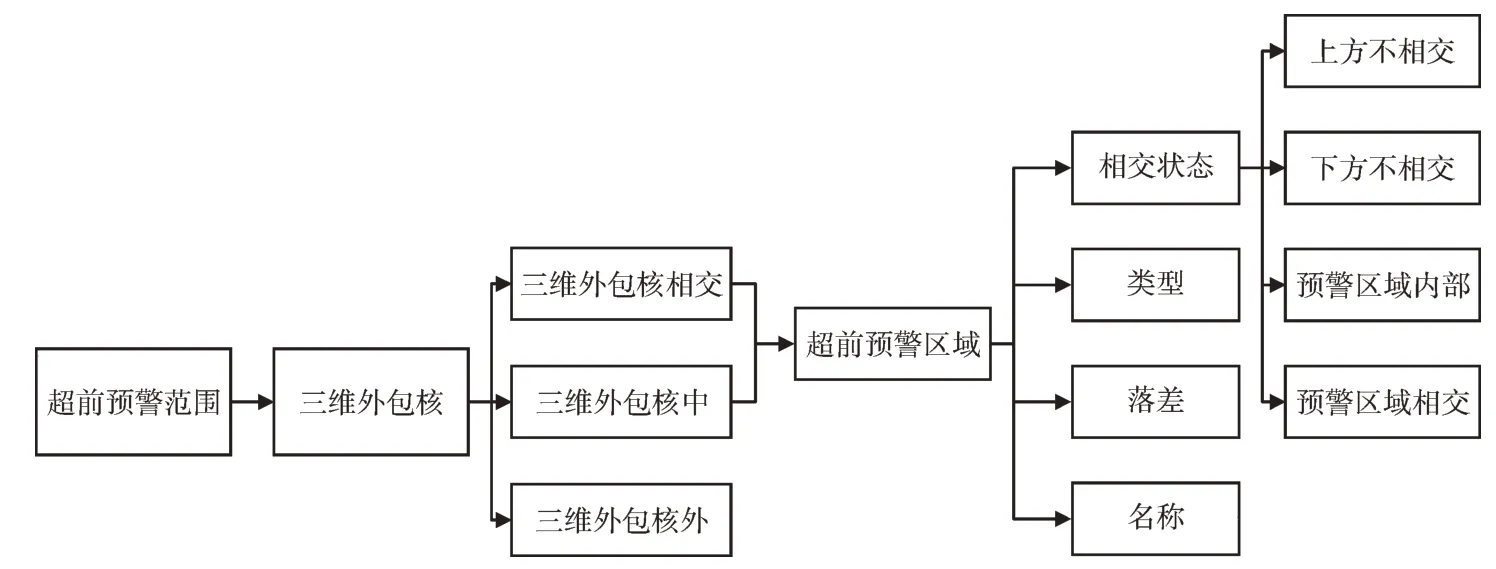
Fig.6 Three-dimensional space advance warning flow圖6 三維空間超前預警流程
3.2 三維超前預警計算模型
在三維空間模型下,根據煤礦實際地質信息進行采場建模、地質信息建模、危險源建模,建立工作面參數化模型。三維模型是物體的多邊形表示,通常用計算機或者其它視頻設備進行顯示。顯示的物體可以是現實世界的實體,也可以是虛構的物體。任何物理自然界存在的東西都可以用三維模型表示。目前,三維建模主要是為數值模擬提供基礎模型。
在三維空間模式下,考慮到各煤層之間的關系、煤層位置高度、各危險源地質信息,根據工作面實時推進實現動態預警。在三維模式下,同二維下相同,由工作面當前位置,自動判斷前方指定范圍內危險源的數量、參數,自動就危險源對工作面造成的安全風險水平進行評估。
三維空間超前預警方法流程如圖7 所示,線段AB 是工作面開采的起始位置,線段GH 是工作面停止開采的位置。設定紅線為該工作面當前開采的位置,若預期前方100m 范圍內的斷層、陷落柱、積水區、煤柱、采空區等危險源及預警,三維模型下將考慮到Z 軸高度的屬性,因此計算方式與二維平面下的計算方式有所不同。
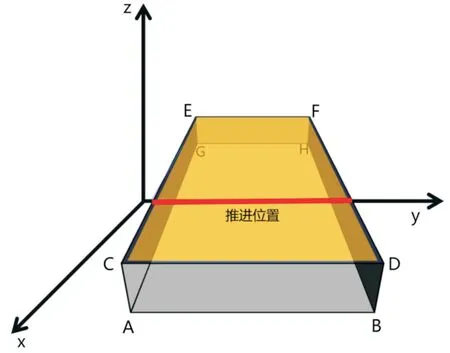
Fig.7 Three-dimensional space flow(1)圖7 三維空間流程(1)
如圖8 所示,矩形區域部分OPMNHIKL 是預警區域,判斷矩形區域內是否存在危險源及危險源類型、與當前工作面的距離,預測三維模型下未來推進過程中危險源對推進造成的影響,為煤礦安全態勢預警進行預警提示并報告。
計算流程如圖9 所示,首先排除距離工作面較遠的危險源,在三維模型下,建立工作面的三維外包核。根據地質信息獲取工作面最小x、y、z的值坐標A(xmin,ymin,zmin),以及工作面最大x、y、z的坐標點F(xmax,ymax,zmax)。對A點和F點坐標構建直線,通過三維坐標點構建立體外包核。如圖所示,JUYRWTOV 立體模型為三維下的外包核。同二維下相同,構建外包核的目的是減少與工作面較遠無關危險源的計算,因為距離工作面較遠的危險源對工作面的影響較小,所以對工作面危險源的預警只需要計算外包核內部以及與外包核相交的危險源。
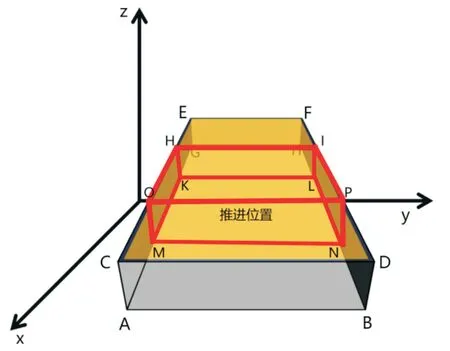
Fig.8 Three-dimensional space flow(2)圖8 三維空間流程(2)
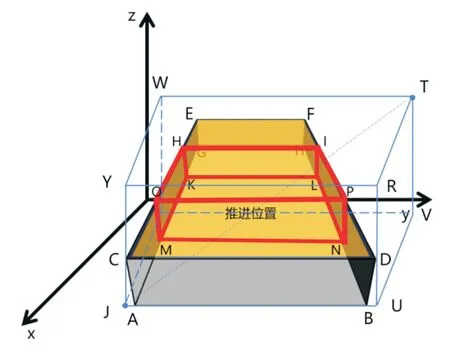
Fig.9 Three-dimensional space flow(3)圖9 三維空間流程(3)
如圖10 所示,藍色云朵表示與外包核相交的危險源,橙色表示在外包核內部危險源的情況,綠色表示與外包核不相交的危險源。其中,外包核外的危險源不參與危險源的預警。利用外包核區分與工作面較遠的危險源不予計算,由于離工作面較遠的危險源對工作面的影響不大,故不進行預警和計算。
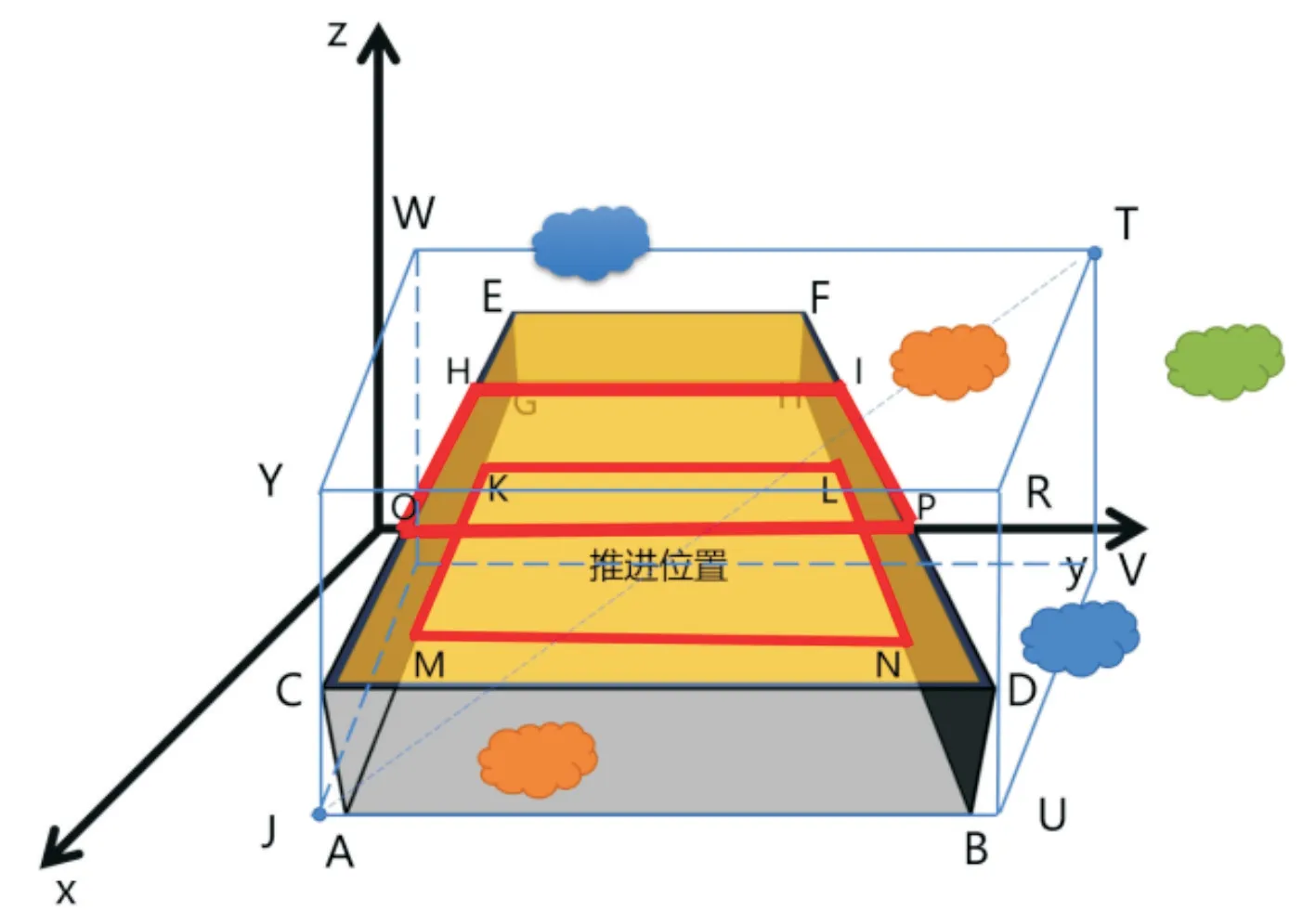
Fig.10 Three-dimensional space flow(4)圖10 三維空間流程(4)
計算三維外包核相交或在三維外包核內部的危險源,確定工作面左邊進尺的坐標點,已知開采起始點A、B、C、D點的空間坐標,停采線E、F、G、H 點的空間坐標,由實時定位系統獲取當前開采掘進位置O、P、M、N 點的空間坐標。根據坐標點A、G 兩點的X 軸和Y 軸坐標,確定線段AG 的斜率k1。

若預測工作面推進方向前方100 m,即MK 的距離為100。
聯立式(2)和式(3),得出KQ、MQ 的值。若M 點空間坐標為M(x1,y1,z1),則所求K 點坐標為K(x1-KQ,y1+MQ,z1)。同理,根據空間坐標點C、E 兩點X 軸和Y 軸的坐標得出XOY 面上的斜率,結合OH 的長度求得H 點的空間坐標點。
Fig.11 Three-dimensional space flow(5)圖11 三維空間流程(5)
在實際的煤礦中,工作面的開采方向及形狀各不相同,因而對于不同的工作面開采方向計算方法也不相同。如圖12 所示,計算工作面右邊進尺坐標空間,同上已知B、H 點的坐標,在XOY 面,根據式(4)可求得BH 的斜率k2。

若當前開采位置右進尺空間坐標N 的值為N(x2,y2,z2),則預測前方100 m 范圍內的危險源,即LN 的距離為100 m。
Fig.12 Three-dimensional space flow(6)圖12 三維空間流程(6)
聯立式(4)和式(5),得出LW、NW 的值,則所求L 點坐標為L(x2-LW,y2-NW,z2)。同理,根據空間坐標點D、F 兩點X 軸和Y 軸的坐標得出XOY 面上的斜率,結合PI 的長度求得I 點的空間坐標點。依次可求得K、L、H、I 空間坐標,便可確定超前預警區域MNOPKLHI 多邊形區域的預警區域。計算出超前預警區域后,便可實現超前危險源預警,具體流程是將預警區域抽取出來。在實際煤礦開采過程中,工作面與危險源空間位置有幾種不同的情況,如圖13所示。具體分為以下4 種情況:危險源在工作面上方不相交、危險源在工作面下方不相交、危險源在工作面內、危險源與工作面相交。
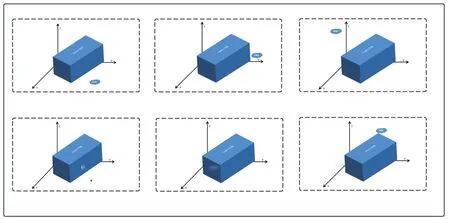
Fig.13 Hazard distribution map圖13 危險源分布
根據位置分布不同,如圖14 所示,首先將三維工作面和危險源數據信息映射到二維空間中,然后判斷在二維面中危險源和工作面是否有交集。若工作面和危險源沒有交集,則工作面和危險源肯定是不相交的;若工作面和危險源有交集,首先判斷危險源Z 值的最小值是否大于工作面Z 軸的最大值,若大于則不相交,然后判斷工作面的最小Z 值,若大于危險源的最大Z 值,則不相交。
下一步,根據工作面的位置計算預警區域和危險源的距離。首先計算出超前預警區域T,立體多邊形的體積如式(11)所示。

設ρ=ρ(x,y,z),(x,y,z) ∈T是立體點(x,y,z)的密度,其中T 是它所占據的空間區域,預警區域的質量如式(12)所示。
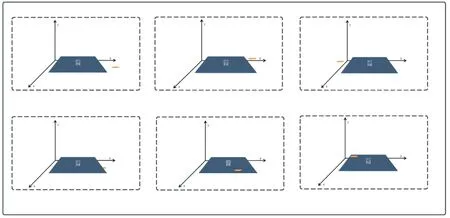
Fig.14 Hazard intersection diagram圖14 危險源相交情況

立體形心的坐標公式為:
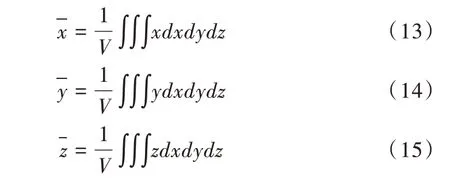

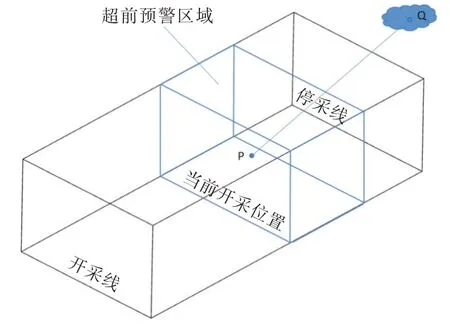
Fig.15 Three-dimensional space display map圖15 三維空間展示
4 煤礦工作面超前預警平臺實現
4.1 超前預警平臺框架
超前預警框架如圖16 所示,首先從煤礦物理實體層獲取動力災害傳感器的數據、超前預警范圍,傳感器的數據以文本方式根據數據規范生成文本文件,通過文本協議上傳到指定目錄中。根據時間、傳感器類型以及分別實時的數據信息解析到數據庫中進行存儲,形成微震監測信息庫、應力檢測信息庫、礦壓檢測信息庫,具有礦壓數據采集、傳輸、存儲、處理、預警、報警等功能的系統。根據煤礦地質信息可分為沖擊地壓礦井和非沖擊地壓礦井,沖擊地壓礦井主要對微震、應力、礦壓等動力災害進行工作面的預警,非沖擊地壓主要對礦壓進行工作面的預警。微震、應力、微震的預警等級都分為綠、黃、橙、紅4 個等級。通過對微震預警、應力預警、礦壓預警等多種檢測方式,搭建多元動力災害、多參數量的煤礦智能化工作面超前預警系統。工作面超前預警,分為綠、黃、橙、紅4 個等級。綠色預警代表安全,危險程度可忽略,不會造成人員傷害和系統破壞;黃色預警代表一般風險,危險程度臨界的,可能造成人員傷害和主要系統損壞,但可排除和控制;橙色預警代表高度風險,危險程度很高,會造成人員傷害和主要系統損壞,須立即采取控制措施;紅色預警代表極其危險,危險程度具有破壞性,會造成人員傷害以及系統嚴重破壞。
4.2 超前預警平臺實現
長期以來,我國采礦設計沿用手工的常規方式,即沿用手工記錄的常規設備和室內人工設計與繪圖的習慣方法。設計周期由于設計人員的水平和熟練程度不同,造成生產周期長、效率底,影響煤礦產業的飛速發展。由于采礦領域的特殊性,采用了三維建模技術,使設計、繪圖、管理更加規范化和科學化。
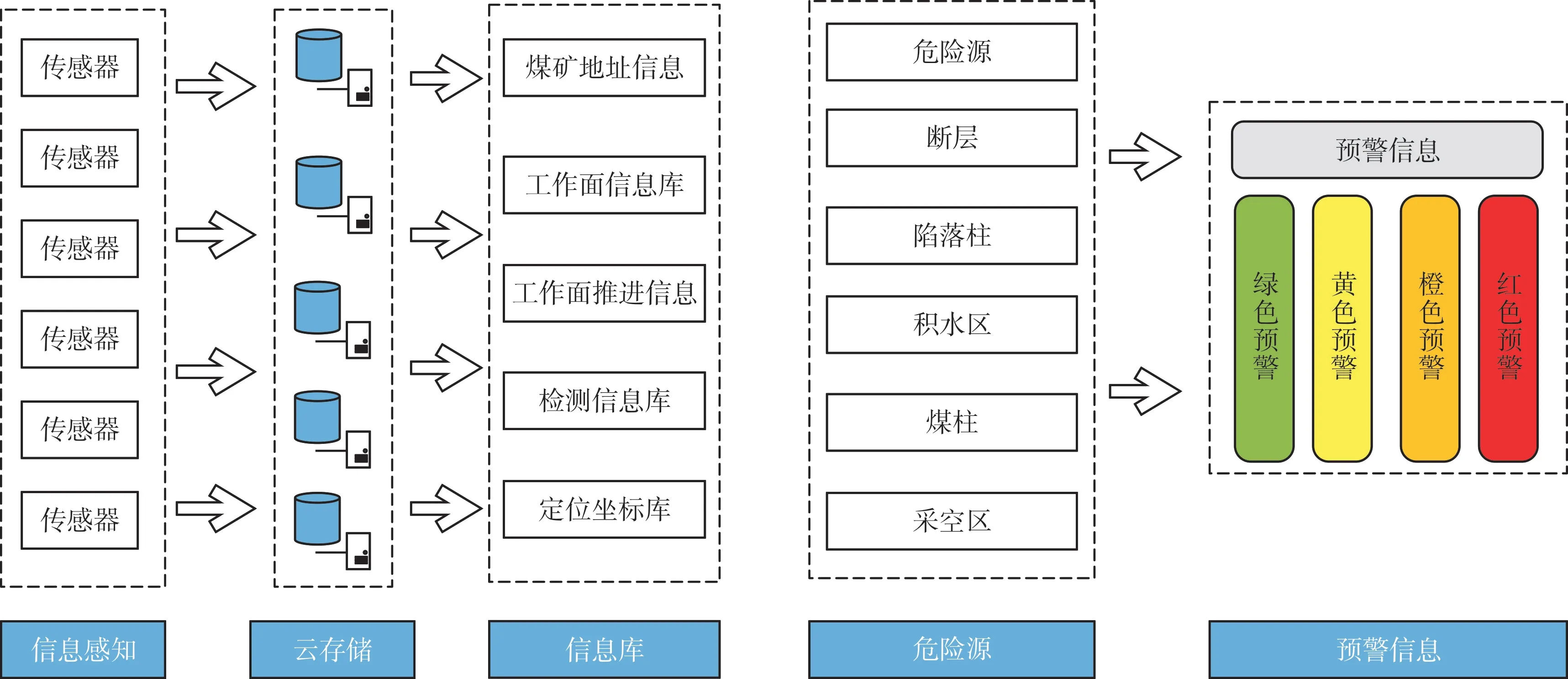
Fig.16 Frame diagram of advance warning圖16 超前預警框架
如圖17、圖18 所示,利用三維建模技術建立數字孿生模型,實現參數化和圖形化關聯。運用三維虛擬現實技術、空間云數據庫技術及WebGIS 技術,以真實的地測、地質數據為依據,構建煤礦數字孿生模型平臺。在三維模型基礎上集成各業務系統,形成一個數字化的數字孿生系統平臺,使礦山環境、生產活動及相關煤礦物理實體對象實現可視化展示,便于全方面掌握煤礦的安全和生產情況,提高應急速度。平臺系統可以方便快捷地查詢煤礦實時動態信息。
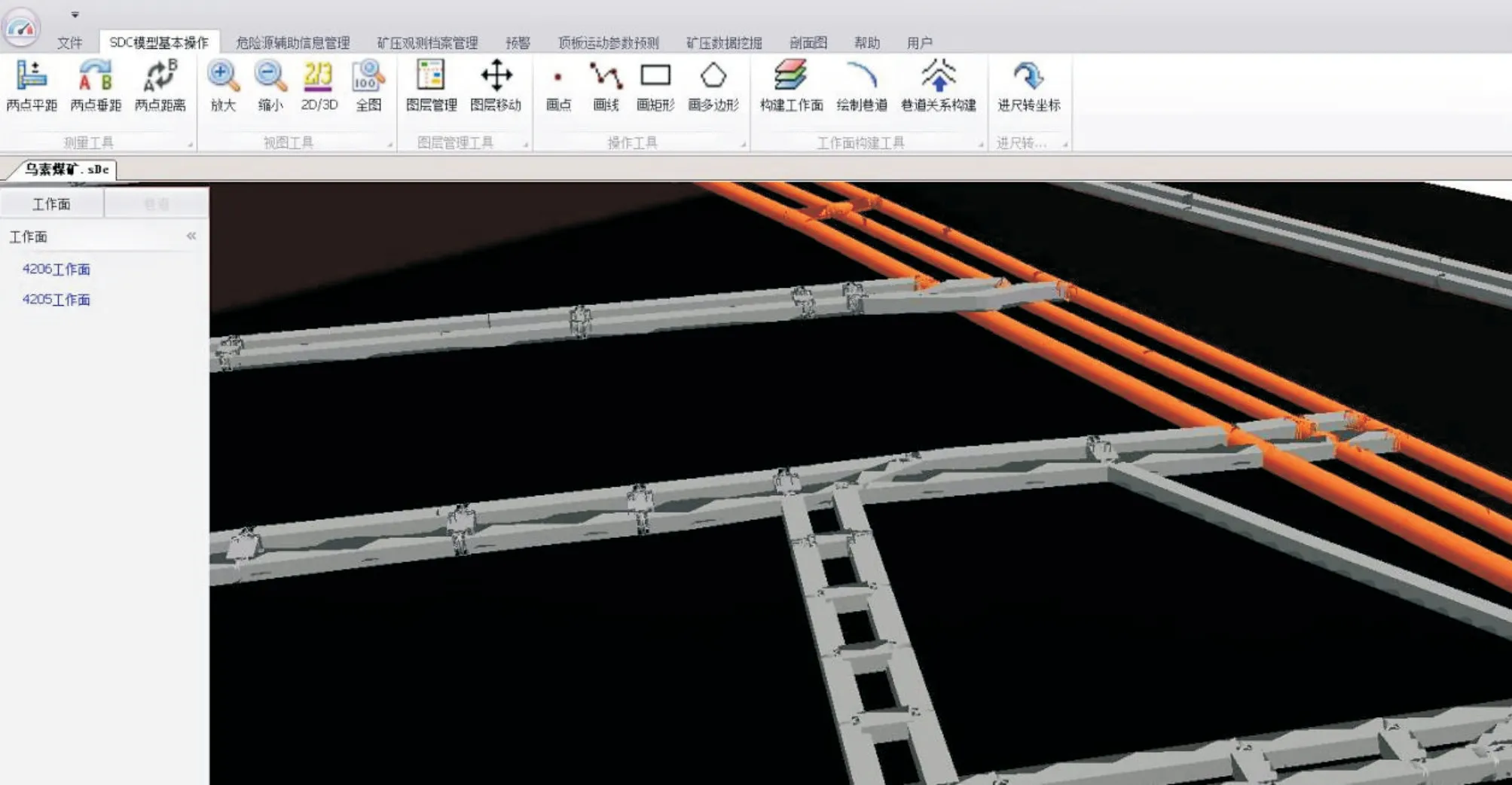
Fig.17 Client 3D warning display圖17 客戶端三維預警展示
平臺針對采集的數據信息進行處理、分析、模型計算從而得到工作面預警信息。如圖19 所示,通過Web 端更好地展示了煤礦工作面預警模塊的信息。預警模塊包含單項預警和超前預警,單項預警中有礦壓信息預警、微震信息預警、應力信息預警的預警指標。工作面預警平臺界面展示煤礦所有工作面的預警詳情,數據每5 分鐘刷新一次,預警指標隨之更新。在超前預警平臺中,實時展示最新的動態信息,讓決策者實時了解煤礦的動態趨勢,一方面為煤礦智能化開采提供了思路,另一方面能夠及時預警,提前做好防護措施,避免危險事故造成嚴重影響。
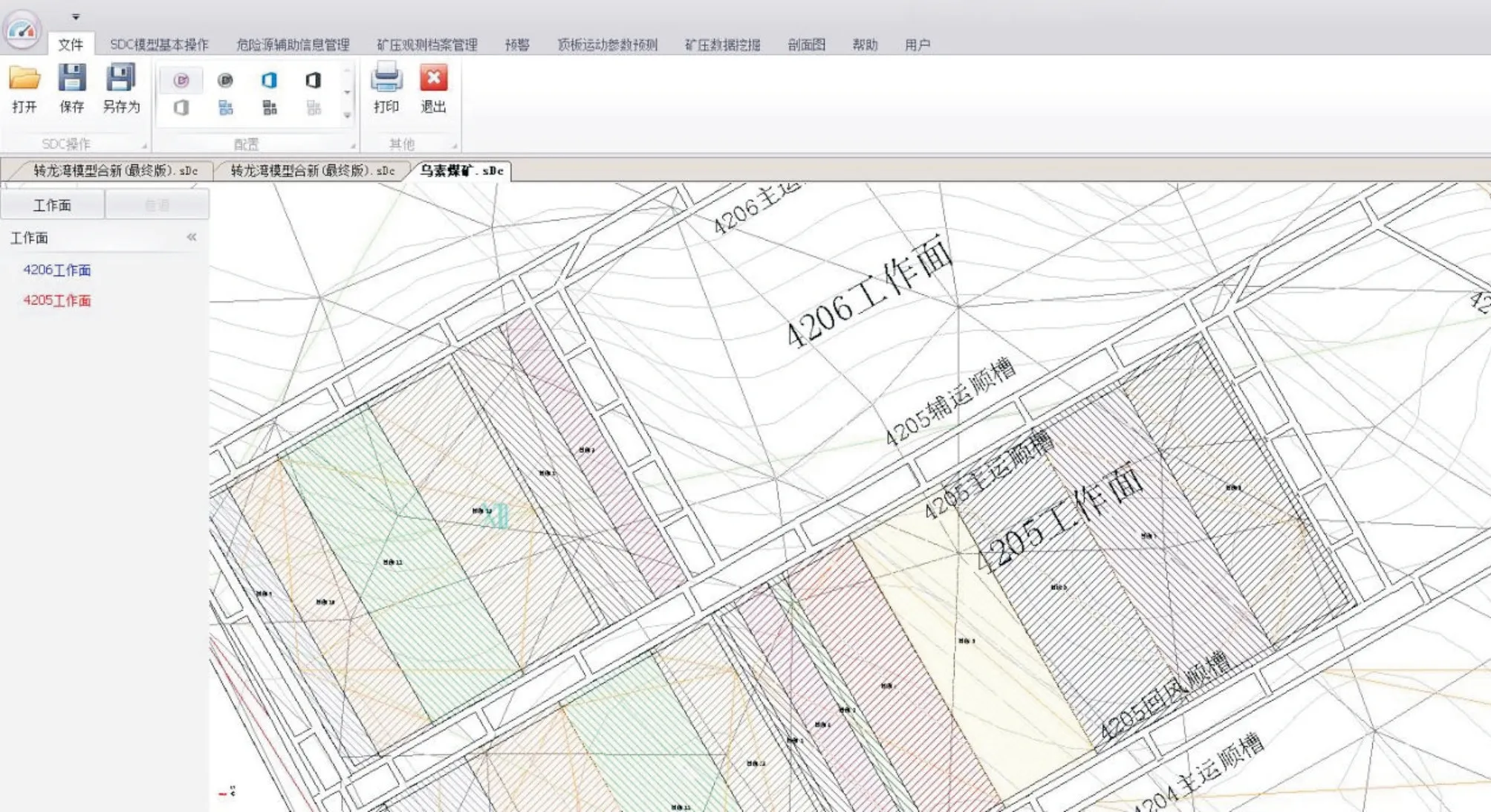
Fig.18 Two-dimensional warning display on the client side圖18 客戶端二維預警展示

Fig.19 Web-side information display圖19 Web 端信息展示
5 結語
本文基于綜采工作面生產系統,提出基于工作面的超前預警設計與運行模式,主要針對工作面進行動態預警和超前預警,進一步實現煤礦智能化和工作面預警系統自動化,提升系統的人機交互能力,達到實時預警、精確預警目的。結合計算機建模、可視化、大數據、機器學習、物聯網、數據挖掘等現代化信息處理方法,針對應力、礦壓、微震等多元動力災害信息進行超前預警。根據危險等級進行等級劃分,指導煤礦應急人員做好防護工作。針對工作面的多元動力災害預警,有效解決了單一動力災害預警的弊端。
將新興的計算應用到煤礦產業平臺中,提高了對煤礦采集數據的處理效率,挖掘出了更多有用信息。同時,可視化界面為用戶提供更直觀的煤礦采集數據變化情況,方便用戶根據煤礦實時數據變化情況開展下一步工作。對于工作面的超前預警,還有很多工作尚未完善,如沒有充分利用煤礦巖層信息,深度挖掘地質中的多源信息等,以更加全面地對煤礦事件進行預警和評估,這有待后續作進一步研究。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
工業設計(2016年4期)2016-05-04 04:00:23
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
現代企業(2015年8期)2015-02-28 18:55:34
現代企業(2015年6期)2015-02-28 18:51:50
中外會展(2014年4期)2014-11-27 07:46:46
河南科技(2014年8期)2014-02-27 14:07:41
民生周刊(2012年10期)2012-10-14 09:06:46
