無人機偵測新技術手段研究
2021-08-04 01:58:26趙衛棟汪庭霽
數字通信世界 2021年7期
關鍵詞:信號
趙衛棟,汪庭霽
(1.國家無線電監測中心陜西監測站,陜西 西安 710200;2.國家無線電監測中心北京監測站,北京 102609)
1 無人機概述
無人駕駛航空器,是一種由遙控站管理的航空器,稱為遙控駕駛航空器,也簡稱為無人機。無人機具有體積小、成本低、操縱簡單、起降靈活等優勢。隨著民用無人機技術的愈發成熟和消費級無人機的蓬勃發展,無人機在航拍、農林、環保、交通、通信、氣象等領域得到了越來越廣泛的應用[1]。然而,無人機的大量使用也引起一系列的安全隱患,無人機“黑飛”事件屢禁不止[2],特別是無人機干擾機場航班正常運營的事件屢屢發生。這不僅嚴重擾亂空中交通秩序危及航空安全,也給人民群眾生命財產帶來安全隱患。
2 無人機系統基本情況
無人機系統主要由無人機和遙控器組成,無人機上主要搭載有圖傳/數傳電臺、飛控平臺和導航信號接收模塊等。目前,主流無人機生產廠商生產的圖傳/數傳電臺使用的頻段為2.4GHz或5.8GHz的ISM頻段,導航信號主要包括GPS、北斗和GLONASS導航等。
無人機和遙控器之間通過無線鏈路進行通信,操控手通過無線鏈路信號(包括飛控信號、圖傳/數傳信號、導航信號等)來實現對無人機的操控。無人機操控者主要通過無人機的圖傳信號來觀察無人機的飛行環境以實現遠距離的安全飛行。另外,無人機飛行過程中通過導航信號來確定自己的出發位置、飛行位置等。
3 無人機偵測主流手段
3.1 無線電偵測
無線電偵測主要通過探測無人機的上/下行鏈路,并通過與無人機信號頻譜數據庫比對,確定接收信號是否屬于無人機的上/下行鏈路信號,來確定無人機的機型。無線電偵測作用距離較遠,響應時間短,不會對其他用戶或設備造成干擾,可以識別無人機型號。但如果無人機采用預設航線飛行,飛行途中處于無線電“靜默”狀態,將無法使用該方法識別無人機。
3.2 雷達偵測
雷達偵測分為主動和被動雷達偵測。主動雷達是靠自身輻射電磁波,接收目標反射回來的波來進行探測,獲取目標的方位距離[3]。被動雷達則是靠著第三方輻射源發射電磁波,接收目標反射的回波信號來獲取目標信息。雷達偵測均使用主動雷達,利用多普勒原理來實現對無人機的發射和定位。雷達偵測方法有效距離較遠,不受無人機型號影響。但無人機的雷達散射面積越來越小,多普勒效應不明顯,降低了被雷達偵測的有效距離和發現概率。
3.3 聲波偵測
無人機飛行時,電機工作和旋翼震動都會產生噪聲[4],主要分布在0.3kHz-20kHz頻段內。聲波偵測通過識別該噪聲來發現無人機,適用于多種類型的無人機,可對聲波特性進行分析歸類,完成對目標的識別。不發射任何電磁波,不易被敵方電子對抗設備偵測和干擾。但是聲波偵測的可靠距離較近,在嘈雜喧囂環境下,聲波偵測效果更差。
3.4 光電偵測
光電偵測系統主要通過可見光、紅外和激光等成像技術,采用可見光攝像機和紅外熱成像儀傳感器來偵測無人機[5],具備全天時工作能力,晝夜識別確認目標。光電偵測可發現多種型號的無人機,但是,無人機紅外輻射特征低,如果減少激光反射或外形隱身,使得光電偵測變得很困難。因此,該方式獨自使用偵測無人機的難度較高,常作為無線電和雷達偵測手段的補充方式。
4 新型偵測技術——外輻射源雷達偵測系統
外輻射源雷達是一種新型低空目標探測技術,其本身并不發射信號,而是通過接收目標反射的非合作照射源(廣播、電視、通信基站等)回波信號進行探測,能以無線電靜默的方式對多種類型和多批次的低空目標進行探測,特別適合于對電磁輻射有限制同時又對探測性能要求較高的應用場合。外輻射源雷達彌補了現有被動探測技術(無線電偵測、光電探測)在探測目標類型和多目標探測方面的能力局限,又比常規主動雷達具有更高的安全性和隱蔽性。以外輻射源雷達為主要預警手段,集成光電探測和無線電偵測設備,可以構成功能完備、協同工作的全被動低空目標探測系統。
4.1 技術特征
與常規主動雷達相比,該新型無源探測系統具有如下技術特點:
(1)節約頻譜。利用已有的非合作輻射源信號對目標進行探測,具有節約頻譜(無需申請頻率)的優點。
(2)安全環保。具有良好的電磁兼容性(不產生電磁輻射),對周邊環境和人員健康不造成影響,可部署在民航機場、軍事基地、要害部門、敏感設施以及人口密集的大型活動場所。
(3)易于組網。無需申請頻率、良好的電磁兼容性、較低的部署難度使得該設備易于組網,組網后可顯著提高雷達覆蓋范圍、目標探測精度和跟蹤連續性。
(4)安全隱蔽。該設備本身并不發射信號,不容易被偵察系統發現和定位,具有較強的安全性和隱蔽性,易于構建平戰結合、軍民兩用的低空預警(含空管)探測體系。
4.2 工作原理
外輻射源雷達由天線、多通道接收機和信號處理機三部分組成:參考天線接收直達波信號,監測天線陣接收目標回波信號;多通道接收機對所有天線接收的信號進行放大、變頻并進行A/D采樣;信號處理機對接收機輸出信號進行處理,經過參考信號提純、雜波抑制干擾、匹配濾波、目標檢測、參數估計與跟蹤處理等步驟輸出目標信息。

圖1 外輻射源雷達工作模式
外輻射源雷達目標定位原理如圖2所示。通過對參考天線信號與監測天線信號的匹配濾波可得到目標回波和直達波的時間差,即目標雙基地距離和r1+r2與基線距離L之差。因照射源(發射站)和雷達站(接收站)位置已知,基線距離L已知,因此可進一步得到雙基地距離和r1+r2,這表明目標是在以照射源和雷達站為焦點的已知橢圓上(橢圓上任一點到兩焦點距離和不變,恒等于r1+r2)。監測天線陣可測量目標方向,以雷達接收站為起點沿著目標方向的射線與橢圓的交點即為目標位置。
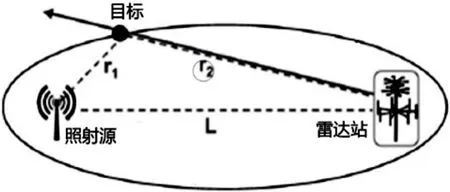
圖2 外輻射源雷達目標定位原理
5 結束語
目前,無人機偵測手段仍面臨眾多難點。傳統的單一偵測手段無法高效準確地偵測到目標,采用多種方式協同偵測的手段將是無人機偵測的發展趨勢。現階段的偵測手段存在識別機型不全面、高度定位能力不足、智能化、自動化和多系統之間聯動能力不夠等問題。因此,建議深入開展無人機偵測手段的綜合研究,融合各類無人機偵測手段,不斷提高技術裝備水平,開展有針對性的無人機攻防能力相關實驗,才能大大提高對無人機的偵測能力,有效地應對日益嚴峻的無人機管控問題。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06