以太環網架構的發展趨勢及其在智能網聯汽車中的應用
2021-08-04 01:59:49李林澤石如泉徐嫚謝佶宏邵杰
時代汽車 2021年12期
李林澤 石如泉 徐嫚 謝佶宏 邵杰

摘 要:隨著智能網聯汽車的快速發展,汽車已經不再是一種簡單的代步工具,更是一個充滿個性、體驗和場景的生態主體,許多豐富多彩的新功能被引入到了汽車當中。大量功能的增加使得智能網聯汽車的電子器件越來越多,網絡架構變得十分復雜,傳統的CAN網絡已無法滿足現今快速發展的智能網聯需求。為此,本文提出了一種基于以太網的環網架構,該架構具有強大的計算能力、拓展能力以及開放性等優勢,能夠與外部設備進行靈活交互、快速數據傳輸以及OTA軟件升級,完全彌補了傳統CAN網絡的不足,適應了智能網聯汽車的發展需求。
關鍵詞:汽車 環以太網 架構 應用
The Development Trend of Ethernet Ring Network Architecture and its Application in Intelligent Connected Vehicles
Li Linze Shi Ruquan Xu Man Xie Jihong Shao Jie
Abstract:With the rapid development of intelligent connected vehicles, cars are no longer a simple tool for transportation, but an ecological subject full of personality, experience and scenes. Many colorful new functions have been introduced into cars. With the increase of a large number of functions, there are more and more electronic devices of intelligent networked vehicles, and the network architecture becomes very complex. The traditional CAN network CAN no longer meet the needs of the rapid development of intelligent networked vehicles. To this end, the paper puts forward a network architecture, which has the powerful computation ability and expanding ability and advantages of the openness, and can flexibly interact with external devices, transmit data quickly, upgrade OTA software, and fully make up for the deficiency of the traditional CAN network, so as to meet the needs of the development of the intelligent made cars.
Key words:car, ring ethernet, architecture, application
1 引言
隨著智能網聯汽車科技的不斷進步,我們經常可以看到與汽車相關的如下的場景:1)汽車被擺放在展廳上,車燈呈現個性化地閃滅;2)汽車與機器人在舞臺上共舞,十分具有科技感;3)一些改裝車的的轉向燈改裝成跑馬燈的形式,顯得更加美觀。在很多場景中,汽車已經不只是一個簡單的代步工具,而更是身份的象征,是用于炫耀、展示的藝術載體。
為了滿足以上豐富多彩的場景需求,汽車需要與更多的外部設備互聯,汽車的設計理念因此也需要從傳統的單單關注性能提升轉型為更多的功能拓展和跨界融合。新型的智能網聯汽車需要具備更為強大的計算存儲和通信能力,給外部預留足夠的硬件接口,軟件也需要滿足可移植、可迭代、可拓展的技術特征,整個系統做到完全開放。
智能網聯汽車不斷增加的電子電氣功能,帶來的問題是ECU越來越多,一些先行的企業已經開始從分散控制向集中控制轉變,域控制器逐漸成為了汽車發展的一種趨勢。基于這種趨勢,車載的智能計算基礎平臺受到了國內外相關企業和研究機構的高度關注,成為未來產業競爭的新焦點。所謂車載智能計算基礎平臺,就是集成異構分布的硬件平臺以及智能駕駛操作系統為一體的系統,它是智能駕駛領域的核心[1]。
目前,國內許汽車產業相關的企業都紛紛參與到了域控制器的研發熱潮中,在此背景之下,本文研發了一款新型計算與通信汽車網絡架構,簡稱環以太網架構。在此網絡架構中,整車集成單元作為域控制器,它的計算存儲和通信等能力完全滿足上述所提要求。
2 環以太網架構簡介
2.1 域控制器
環以太網架構是基于域控制器構建的,所謂域控制器,其實是主機廠將ECU化繁為簡之后的衍生物。以往ECU(電子控制單元)廣泛存在于車輛的發動機、變速箱等底層零部件之中,汽車的每一個功能都需要單一或者多個ECU模塊進行控制,以此實現整車信息的轉化和處理。由此,這些遍布車身的ECU組成的架構就叫分布式電子電氣架構。ECU越多,意味著車輛的電子功能越豐富,但隨之而來的是分散的ECU模塊容易導致車輛線束布置復雜,車身越來越重,從而導致整車成本高昂;另一方面,由于涉及的供應商眾多,ECU模塊的軟件開發始終無法同步,后續更新也難以為繼,遑論當下熱議的OTA升級了。在汽車智能化時代,車輛需要有不斷進化的能力,這種分布式電子電氣架構顯然滿足不了整車數字化轉型的需求。2012年特斯拉Model S誕生意味著車上安裝數十上百個ECU的時代即將過去,ECU的減法時代到來。此后,傳統ECU模塊開始軟硬件分離,硬件被逐步取消,軟件被集中到一起,通過單個計算平臺來實現對多個功能的控制。
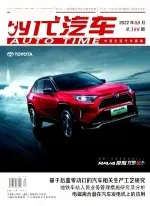
整車集成單元作為域控制器,每個功能域設置一個整車集成單元,整車集成單元之間通過以太骨干網進行連接構成環以太網型式的架構。其它子控制器可選擇采用CAN總線、LIN總線、以太網連接對應的域控制器,如圖1所示。
2.2 以太骨干網
智能網聯汽車域控制器之間通信的數據量可達到幾十甚至上百兆,傳統的CAN總線帶寬不足,無法滿足如此龐大的數據量傳輸。此外,智能網聯汽車各零件軟件更新迭代的頻率很高,尤其是智能駕駛域控制器及其子控制器,因此智能網聯汽車的軟件更新通常是以OTA(空中下載技術)的方式來實現的。根據功能不同,一個軟件升級包的大小在幾十兆比特到幾吉比特之間,而傳統CAN網絡實際最高的傳輸速率僅能達到500K左右,如此一來,一個幾吉比特的軟甲升級包在升級時會消耗掉幾個小時甚至更久的時間,這是極不實際的。綜上所訴,采用速率可達1G/10Gbsp、支持二層交換、又有良好的安全可靠性的以太網替代傳統CAN作為骨干網絡是智能網聯汽車的必然選擇。
2.3 整車集成單元
整車集成單元的作用是收編傳統ECU功能、電源集中管理(1A~40A)、IO集成(PWM/ADC/H橋/DI/DO)以及通信集成(ETH/CAN/LIN)。整車集成單元軟硬件可按需靈活部署,支持OTA升級。如圖1所示,環以太網架構中包含了3個整車集成單元,其中整車集成單元2中集成了MPU的功能。
2.3.1 整車集成單元硬件接口
除ECU外,整車集成單元還連接了大部分的車內設備,例如通過一路以太網連接車載路由器。同時,整車集成單元硬件預留大量的IO口及多種目前主流的通信接口,且都為標準化接口。目前整車集成單元硬件接口主要包含如下3類:1)智能電源接口,包括1A、3A、10A、20A、30A、40A的常規接口,以及H橋和傳感器接口等;2)I/O接口,包括數字量輸入、模擬量輸入、LSD/PWM接口;3)網絡通信接口,包括以太網、CAN、CANFD以及LIN等。在滿足整車需求的情況下,整車集成單元還可以外接外部設備。
2.3.2 整車集成單元軟件部署
整車集成單元通常采用分布式的軟件部署方式,以達到業務功能冗余、提升整車可靠性、開放能力(整車級資源抽象與開放API)的目的。軟件部署具體如下:
整車集成單元0:整車控制器算法(上下電控制/充電控制/換擋/扭矩管理/駕駛模式等);
整車集成單元1:車身控制器算法(中控鎖/遠近光燈/轉向燈/雨刮/車窗控制/電源模式管理等);
整車集成單元2:其中MPU:360/APA算法,MCU:IO接入。
3 環以太網架構系統控制外部設備的原理
基于環以太網架構的完全開放性,硬件接口的多樣性,此架構不僅能連接大多數車內模塊,還可以直連外部設備,所以可以有多種與外部設備互聯的方法,下面介紹其中一種。
整車集成單元連接的車輛設備中包含了車輛中大部分的無線通訊模塊,如車載路由器。通過車載路由器,外部設備可以接入整車以太網絡,外部設備只需要按照TCP/IP協議向車輛發送UDP報文就可以達到控制車身的效果。外部設備接入整車的方式如圖2所示:
以機器人作為外部設備的代表介紹圖2的控制原理。可編程機器人通過車載WIFI連接車輛無線網接入整車以太網絡,按照TCP/IP協議向車輛發送UDP以太網報文以達到控制車輛部分零件(上鎖、解鎖、開關燈等)。只要事先編好程序,讓機器人在進行不同動作時向車輛發送對應的以太網報文指令,在控制機器人完成指定動作時,車輛就會做出相應的操作,從而達到車輛與機器人的協同控制,再豐富機器人動作程序,即可實現機器人與車輛共舞的場景。
4 結束語
多樣化的車輛使用場景使汽車的定義變得模糊,無論是單純地為了應付目前特殊的使用場景還是做到未來的萬物互聯,汽車將從一個簡單的交通工具演變成一個生態主體。依賴于軟件的開放性、硬件接口冗余設計及標準化、以及整車集成單元的強大計算能力等,環以太網架構為智能網聯汽車的生態主體提供了可能。目前,在整車網絡架構向中央式演進的過程中,環以太網網絡架構還剛剛處于萌芽階段,未來的架構將會更加智能化與多樣化。
基金項目:廣西創新驅動發展專項資助項目(桂科AA18242039);柳州市科學研究與技術開發計劃資助項目(2018AD10501)
參考文獻:
[1]苗圩:對電動化、智能化、網聯化發展提出三點建議,智能電動車測評,2021.
[2]整車電控系統及架構設計技術,一覽眾車,2021.
[3]軟件定義汽車,E-E架構是關鍵,一覽眾車,2020.
[4]域控制器時代:ECU 的「消亡」與汽車「中央大腦」的重建,無人車情報局,2021.
猜你喜歡
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
考試周刊(2016年76期)2016-10-09 08:45:44
科技視界(2016年20期)2016-09-29 14:22:00
科技視界(2016年20期)2016-09-29 12:03:12
科技視界(2016年20期)2016-09-29 11:47:01
科技視界(2016年20期)2016-09-29 11:02:20
大眾理財顧問(2016年8期)2016-09-28 13:45:18
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50