混合動力汽車整車控制器開發的研究與應用
2021-08-05 01:29:50何烈永韓晶任冰禹葛帥帥劉清昭郭如強
汽車工程師 2021年7期
何烈永 韓晶 任冰禹 葛帥帥 劉清昭 郭如強
(寧波市鄞州德來特技術有限公司)
混合動力汽車最重要的特點是能夠在滿足日益嚴格的排放標準和操縱靈活性要求的前提下顯著提高汽車的燃油經濟性[1]。由于整車控制器對過控制策略開發過程的重要性[2],國內外眾多知名機構對整車控制器進行自主研發和裝車應用。雖然國內外的整車控制器平臺均做到了基于AUTOSAR標準的軟硬件實現,但是由于國外控制器開發平臺價格昂貴,部分國內控制器的規模化應用有待提高,同時半導體、集成電路、計算機、傳感器及控制算法等技術與時俱進,基于此,文章開發了一款整車控制器,目前正處于定型生產階段。
1 項目目標確定及系統組成
1.1 整車控制器總體設計開發目標
本項目的目標是設計和開發一款混合動力汽車整車控制器,滿足國內生產需求,達到技術協議要求的精度、性能的工程目標。主要功能包括:應用層與底層軟件集成、基于CCP協議在線標定、BootLoader下載等,如表1所示。

表1 混合動力汽車整車控制器開發主要功能及說明
1.2 整車控制器組成
根據混合動力汽車整車控制器開發功能需求列出開發關鍵組成,如表2所示。
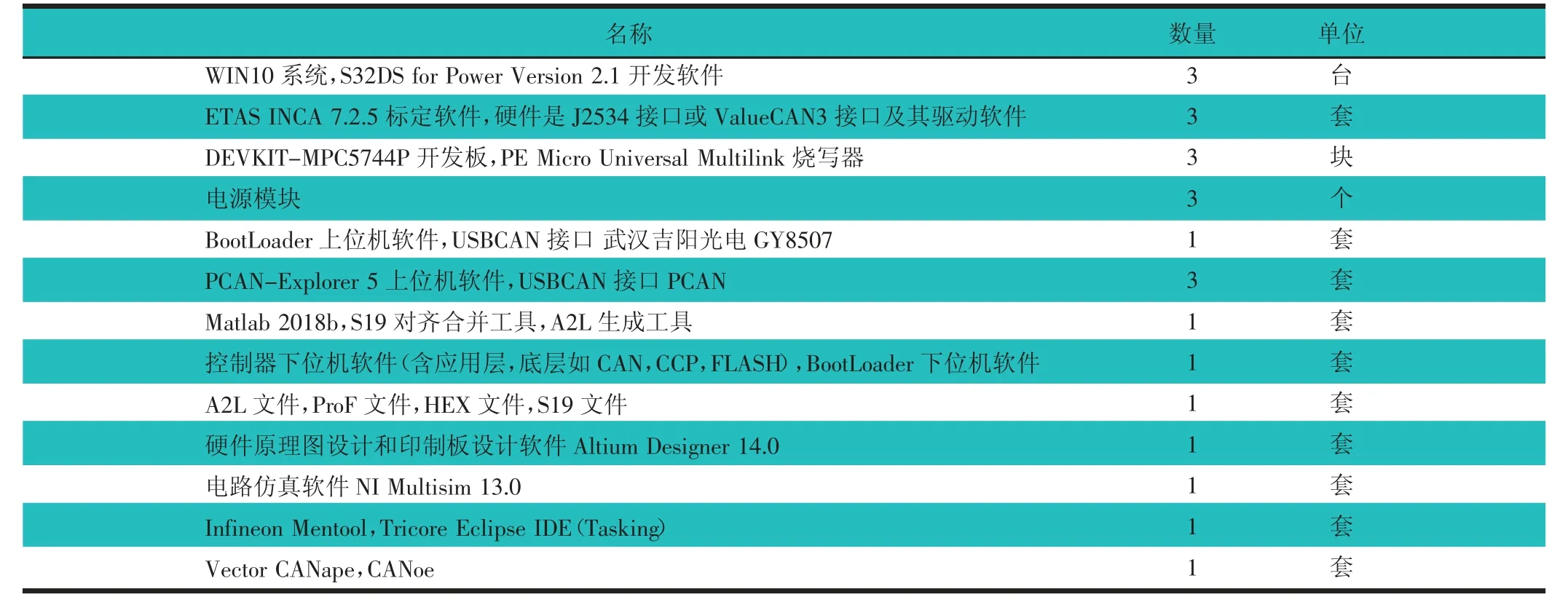
表2 整車控制器開發關鍵組成
該款整車控制器的硬件和軟件實現適用于混合動力汽車整車控制器試驗與小批量產。
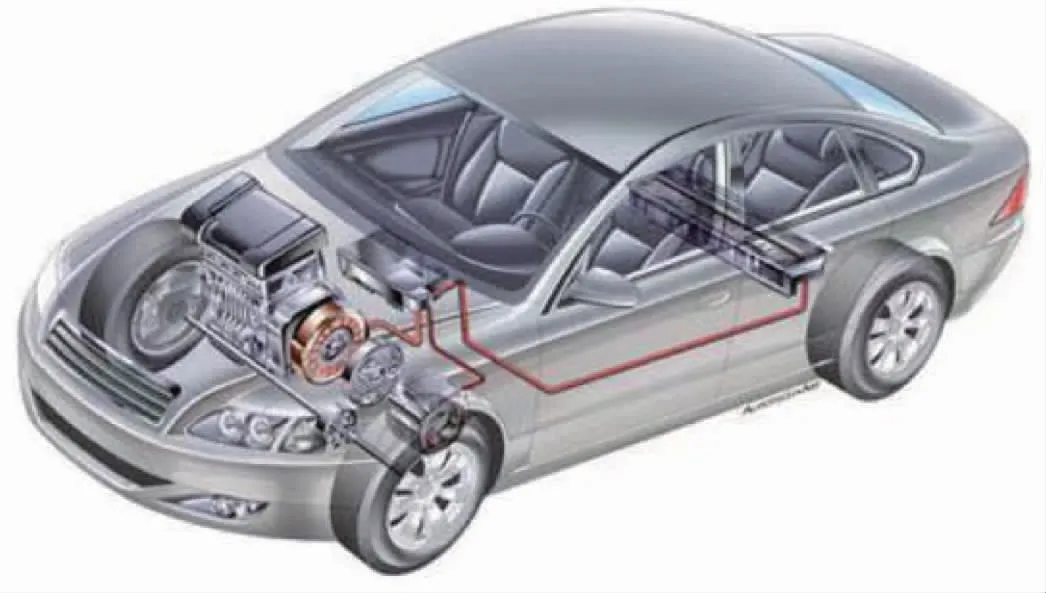
1.3 硬件組成
控制器硬件印制板主要包括供電模塊、微控制器MCU、仿真器接口、電連接器、IC、輔助元器件等。
常見的控制器信號類型有:PWM輸出、高有效輸出、低有效輸出、高有效輸入、低有效輸入、電流型和電壓型ADC輸入、5 V輸出、CAN/LIN總線等。
2 控制器軟件組成、模型、工具鏈
2.1 軟件組成
控制器軟件主要由應用層軟件、底層軟件、標定軟件、診斷軟件、軟件工具鏈等組成,軟件框圖如圖1所示。
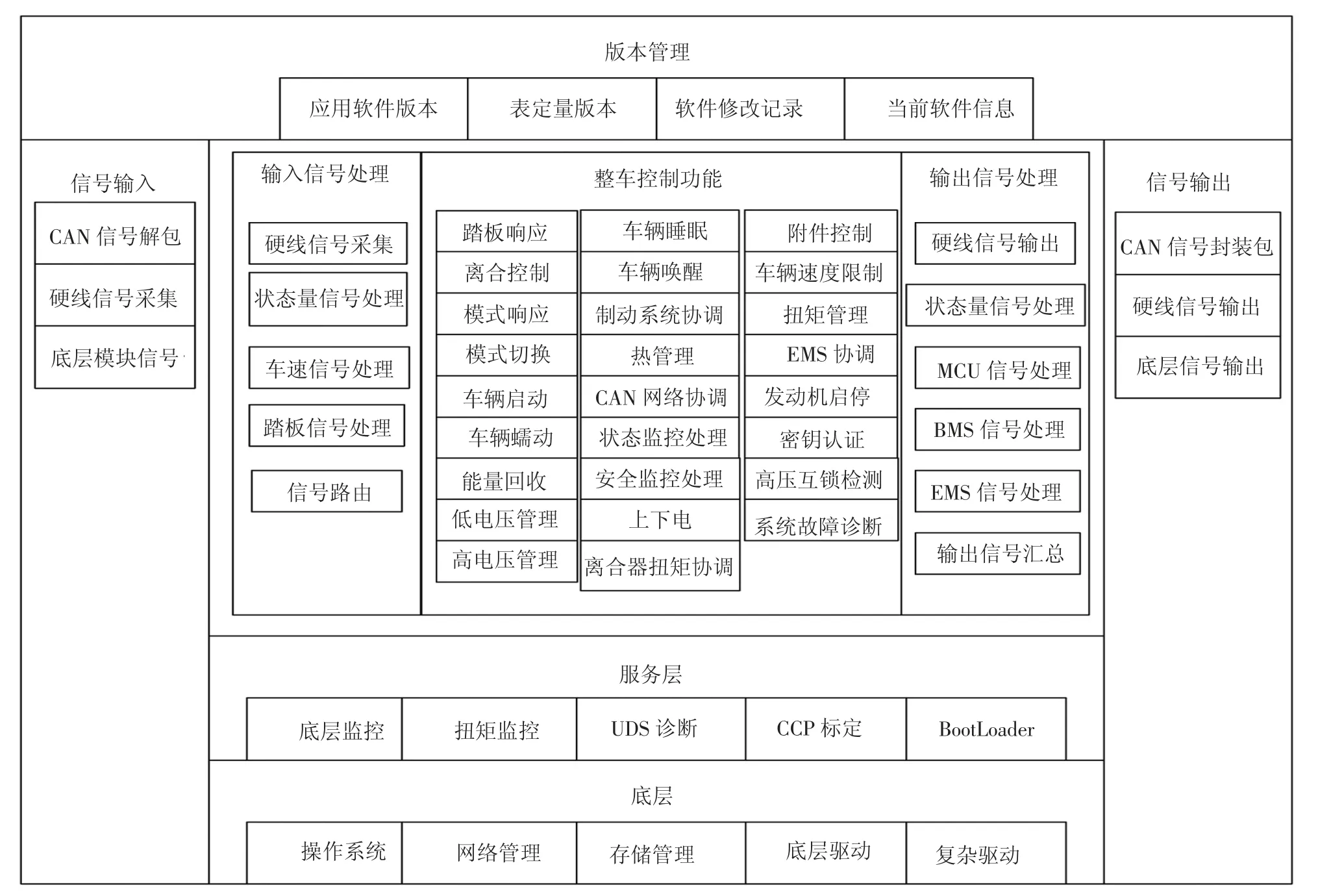
圖1 混合動力汽車整車控制軟件組成框圖
2.2 控制策略仿真
混合動力汽車根據動力系統的結構分為串聯構型(Series)、并 聯 構 型(Parallel)、混 聯 構 型(Combined,Series-Parallel,Power-split)[2]。按混合度分為微混、輕混、中混、強混、混合策略混動以及增程式混動。按外充電能力分為可外接充電式和不可外接充電式。按驅動電機在動力系統中的位置分為P0、P1、P2、P3、P4、PS及其組合。不同構型的混合動力系統各有其優缺點,其方案的選擇取決于多種因素,例如:應用環境、駕駛工況、成本考慮等。
仿真工具最大用處就是提供一個標準化的被控對象模型、數據后處理等輔助功能。混合動力的控制策略通常基于Matlab/Simulink搭建,仿真工具與Simulink聯合仿真。
動力電池自身溫度高低和內部溫度均勻性對其性能和壽命影響很大[3],鋰電池最佳工作溫度范圍為25~40℃,混合動力汽車使用時環境溫度的變化范圍可達到30~60℃。整車動力學與熱管理仿真軟件Simcenter Amesim與Simulink聯合仿真,版本為Amesim R2019/Matlab 2017a/VS2013,步驟如下:
1)調用VC編譯器編譯Amesim模型生成obj文件;
2)調用Matlab編譯器生成S-funcion文件;
3)Simulink通過S-function調用Amesim模型實現聯合仿真。
整車動力經濟性仿真軟件AVL Cruise與Simulink聯合仿真,版本為AVL-CRUISE R2019/Matlab 2020a/VS2015。
文章開發的混合動力系統介紹如下[4]:
1)基本硬件構成:發動機、電池、電機、發電機、電機/發電機控制器、連接發動機和輸出軸的離合器、4組齒輪減速器等動力總成核心部件。
2)部件控制:以發動機BSFC線為優化目標的整車控制策略;動力電池作為能量存儲器、能量緩沖器、功率平衡器配合發動機工作點的調節。
3)驅動控制策略邏輯:控制系統首先獲取加速踏板開度、駕駛模式以及車速等信息,然后根據Ped alMAP查詢系統的需求扭矩/功率,接著以需求扭矩/功率為目標,根據部件的能力(主要指電池的放電能力、發動機的最大功率、BSFC等特性),在發動機和電池間實現功率的協調分配。
4)3種系統模式:
a.純電動模式,電能消耗完全由電池提供,發動機、發電機均處于停機狀態;
b.串聯混合動力模式,離合器斷開,發動機通過發電機驅動電機,電池輔助發動機平衡負載;
c.并聯混合動力模式,離合器接合,發動機直接驅動車輛,電池輔助發動機平衡負載。
根據以上整車模型、仿真控制策略、計算任務工況[5-6],計算任務得到的WLTC工況運行結果如圖2所示,WLTC工況發動機工作區間如圖3所示,NEDC工況發動機工作區間如圖4所示,NEDC工況運行結果如圖5所示。
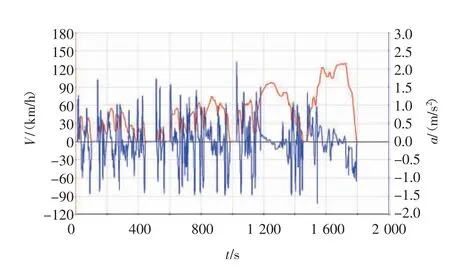
圖2 WLTC工況運行結果
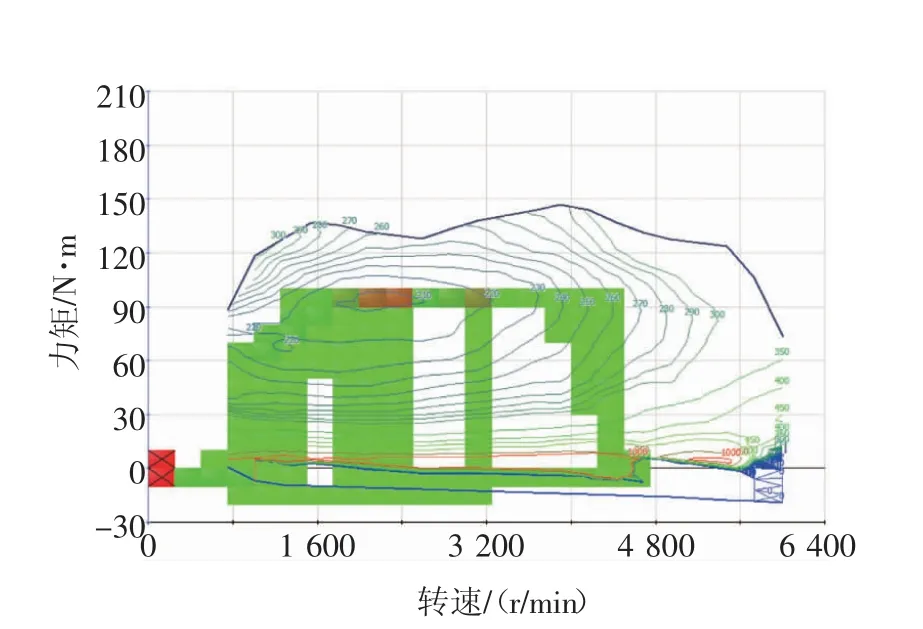
圖3 WLTC工況發動機工作區間
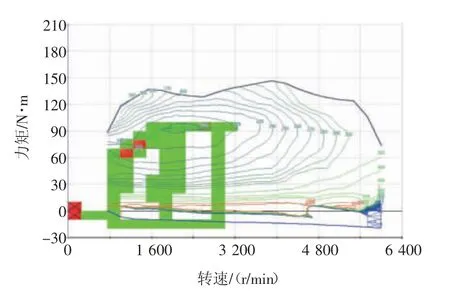
圖4 NEDC工況發動機工作區間
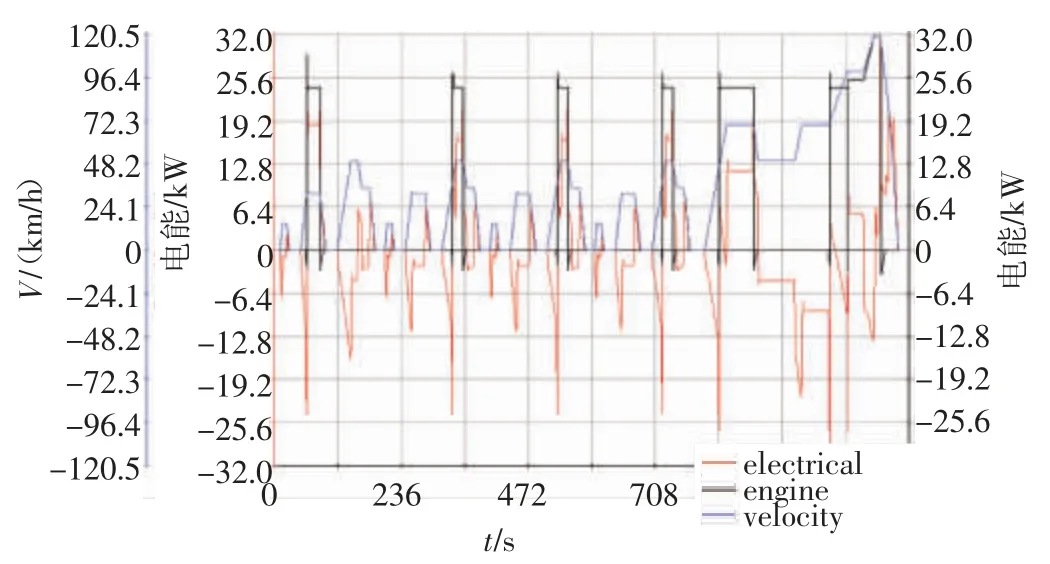
圖5 NEDC工況運行結果
整車動力性經濟性計算結果如表3所示。目前公告油耗采用NEDC油耗,WLTC油耗僅供參考。燃油版車型油耗6.4 L/100 km,故混動系統可降低油耗20%左右。采用高效發動機,油耗還可降低10%左右。NEDC工況下電池SOC波動不大,系統采用1.3 kW·h電池能夠滿足要求。
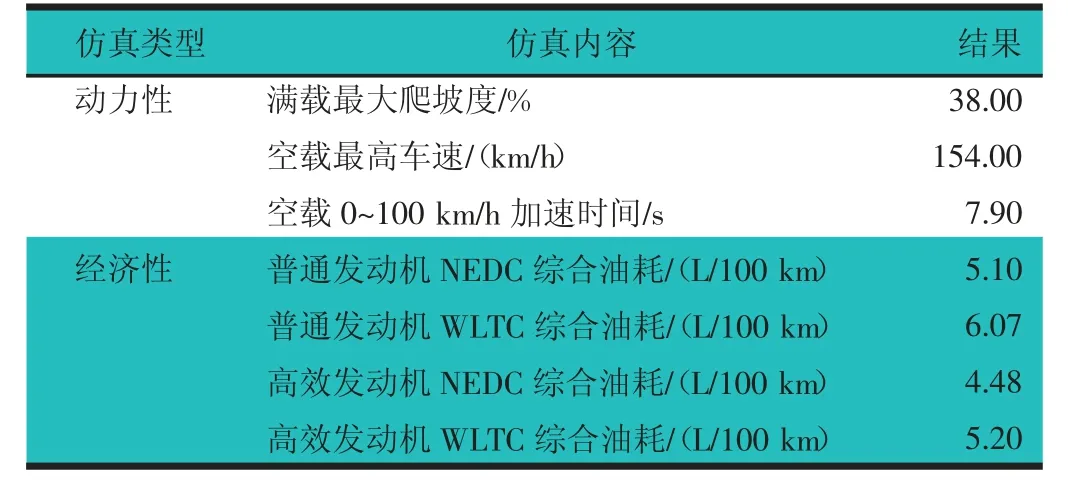
表3 整車動力性經濟性計算結果
2.3 控制模型及應用層軟件
在仿真用的基本控制策略基礎上,滿足工程應用[7]的控制模型還需要考慮整車控制需求、混合動力各個部件的特性和限值[8],CAN矩陣、高電壓管理、附件管理、安全監控、故障診斷等。
混合動力整車控制軟件架構設計,利用Matlab/Simulink/System Composer建立應用層軟件架構模型Architecture Model,并利用Matlab/Simulink混合動力整車控制策略的應用層軟件模型。
2.4 底層軟件
底層軟件開發環境中,包含adc、can、cpu、etimer、flash、gpio、lin、siu、spi、pit、pwm以及CCP通訊協議棧等驅動代碼(分為.c和.h文件)。
2.5 BootLoader
基于CAN開發的BootLoader是一段引導程序,用于應用層軟件的CAN燒寫,實現不開蓋燒寫功能。可以采用CAN協議、UDS協議[9]或CCP協議實現Bootloader功能。BootLoader包括底層程序和上位機下載程序。首先燒寫BootLoader程序,選擇BootLoader工程的路徑。其次,將生成的S19文件使用“S19文件對齊工具”對齊。然后,連接BootLoader燒寫硬件(吉陽光電USB-CAN Adapter)至控制器的CAN0口,打開燒寫上位機軟件,然后選擇加載對齊后的S19文件。最后,重啟控制器,等待應用程序下載完成。
2.6 AUTOSAR
AUTOSAR(Automotive Open System Architecture),即汽車開放系統架構,是汽車控制器(ECU)標準軟件架構。控制器軟件基于AUTOSAR架構開發,軟件分為基礎軟件及應用軟件。
2.7 單元測試、系統測試
基于V流程開發過程中,單元測試、系統測試是開發的閉環驗證環節。
測試目標:符合軟件單元設計規范;軟硬件接口定義;定義的功能;無非預期功能;魯棒性。
測試方法:基于需求測試;接口測試;故障注入測試;模型代碼背靠背測試。
測試用例編寫:需求分析;等價類生成;邊界值;錯誤推測;覆蓋度。
2.8 功能安全
針對關注功能安全的用戶,以ISO 26262:2018版為標準采用基于模型設計開發符合功能安全要求的軟件,涵蓋從需求管理、架構設計、單元設計與驗證、集成驗證與嵌入式軟件測試等各階段的主要活動、驗證方法、基于模型設計平臺的工具、以及軟件開發過程中所采用工具的評級和鑒定方法。
2.9 軟件集成
工程集成的目的是把底層軟件和應用層軟件集成起來,生成ECU軟件。以MPC5744P為例,打開底層程序工程,將應用層模型生成的.c和.h文件分別放在工程的SCR和INCLUDE文件夾里。然后在S32DS里選擇工程,右鍵選擇Refresh刷新得到新的工程。
2.10 標定與測量
遵循CCP Version 2.1協議進行CAN標定,采用ETAS公司的INCA軟件進行MPC5744P Flash的CCP標定開發[10-11]主要包含內容如下:
1)與ECU配套生成的A2L和HEX文件或S19文件;
2)用于FLASH編程的PROF文件(包含了.prm、.cnf、.ini以及.layout文件);
3)S19文件對齊工具、A2L處理工具、標定量處理工具。
A2L文件[12]中進行標定變量定義、測量變量定義。在存儲頁管理界面的選擇上載,實現從ECU讀數據。
INCA FLASH編程操作界面如圖6所示,INCA PROF配置需要加載PROF控制文件,一次成功的FLASH燒寫的提示如以下紅圈所示,即選擇FLASH編程后,ECU文件名自動加載,以及生成INCAFLASH編程控制文件PROF的燒寫提示。
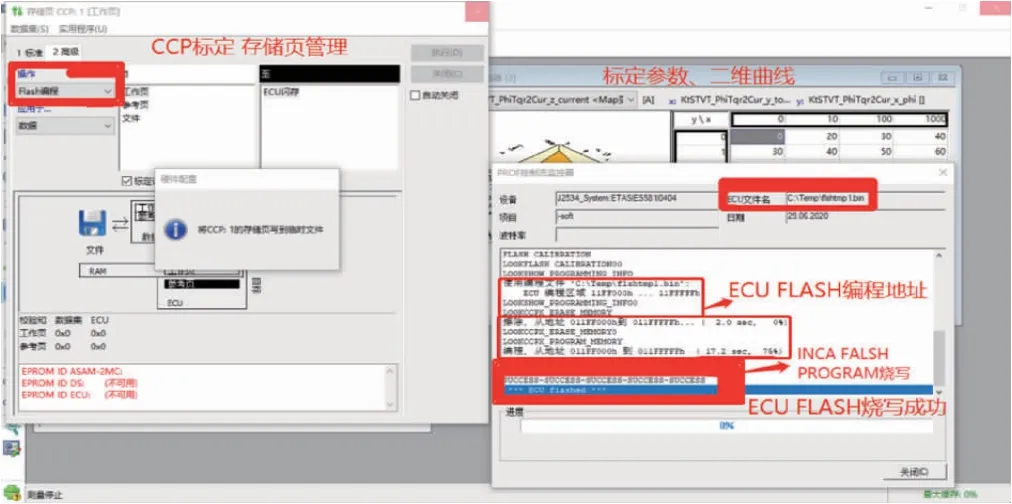
圖6 ECU FLASH編程操作界面
FLASH擦除、編程指令解析如圖7所示:
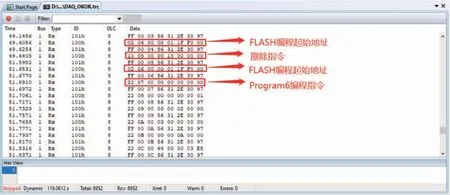
圖7 FLASH編程指令與CAN通訊數據解析界面
3 混合動力整車試驗
混合動力汽車整車試驗驗證了控制策略、控制器軟硬件的可行性,以及增加的部件(BSG、DCDC、BAT TERY、電子增壓器、高電壓互鎖電路[13]、高電壓自放電電路、短路熔斷保護電路、絕緣監控電路[14]等)選型正確性。控制器檢測、協調以上電路,使高電壓處于正常工作狀態,出現故障時控制器及時診斷、處理、顯示。在整車試驗過程中,通過多組工況的試驗得到相應的數據。
3.1 整車試驗
整車為一輛SUV,整車試驗安裝情況如圖8所示。

圖8 整車試驗-電氣系統(左)、發動機艙+電機與電氣系統(中)、電子增壓器的機械與電氣安裝(右)
3.2 整車控制器與調試設備
整車控制器及其下載調試器、PCAN設備、INCA標定設備,即主芯片為MPC5744P和主芯片為TC1782控制器及其調試標定設備分別如圖9、圖10所示。
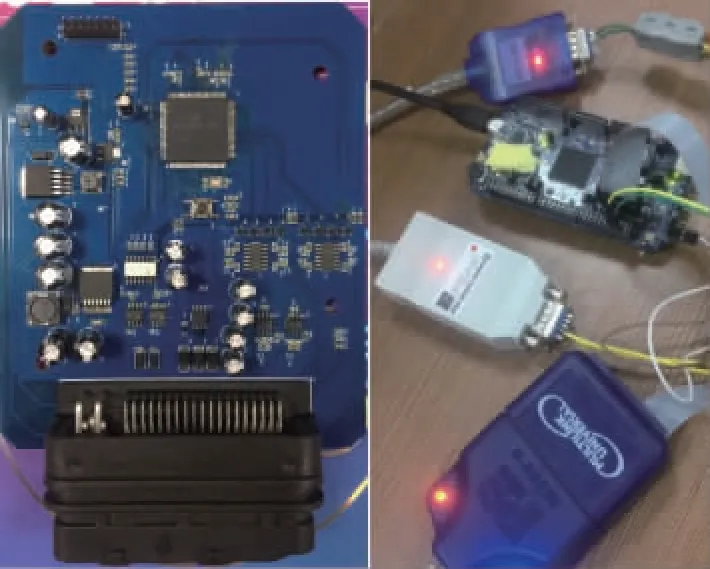
圖9 主芯片MPC5744P控制器(左)與調試設備(右)
4 試驗結果與數據分析
利用ETAS INCA和MDA通過CAN標定設備讀取整車控制器的參數,得到加速踏板、燃油消耗量、發動機轉速、電子增壓器進氣與排氣的空氣壓力、節氣門位置曲線,啟動過程電子增壓器試驗曲線結果如圖11所示。
5 結論
文章對混合動力汽車整車控制器進行仿真計算、軟硬件設計和相關試驗開發驗證。并在混合動力整車上將自主研發的控制器進行試驗,結果表明控制策略仿真建模、應用層軟件和底層軟件集成、標定軟件以及BootLoader下載等功能均得以實現,參數計算算法合理,精度符合要求,界面直觀操作方便。控制器符合面向工程化應用的研發和批量生產。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動力(2015年1期)2015-02-27 12:11:01
電測與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動力(2014年2期)2014-02-27 12:10:15