一種不下箱狀態的彈上慣組一體化標定方法
2021-08-05 09:29:09劉宇申亮亮王新龍蔡遠文
航空兵器 2021年2期
劉宇 申亮亮 王新龍 蔡遠文


摘要:為縮短標定時間、 簡化標定流程,將導彈、 發射箱隨彈上慣組共同參與標定,從而在不下箱狀態下完成對彈上慣組的標定。然而由于導彈體積、 質量較大,使得轉臺轉動受限。基于此,提出了一種不下箱狀態的彈上慣組一體化標定方法。根據轉臺轉動的限制條件,并考慮加速度計、 光纖陀螺標定方法的特點,設計了一種包含6個靜止位置的轉動路徑。通過轉臺連續轉動,實現對加速度計、 光纖陀螺的一起標定。考慮到轉臺轉動時間較短,光纖陀螺常值漂移累積的誤差量較小,難以進行估計。因此,采用雙位置測漂法對光纖陀螺常值漂移進行標定。仿真結果表明,本文的標定方法能夠取得與傳統標定方法相近的標定效果,具有較高的標定精度; 利用標定結果對常值漂移進行補償后,重新對光纖陀螺進行標定,標定精度得到提升。
關鍵詞: 不下箱狀態; 轉臺轉動受限; 彈上慣組; 轉動路徑設計; 一體化標定;導彈
中圖分類號: TJ765.4; V249文獻標識碼: A 文章編號: 1673-5048(2021)02-0086-07
0 引? 言
在導彈發射之前,通常對彈上慣組進行標定,從而獲得彈上慣組誤差參數。一般情況下,將彈上慣組從導彈上拆卸,放置于三軸轉臺進行標定,整個過程繁瑣復雜,耗時較長[1-2]。為避免拆卸彈上慣組、 縮短標定時間,將導彈、 發射箱隨彈上慣組共同參與標定,即以不下箱狀態完成彈上慣組的標定[3-4]。
在傳統的標定方法中,導彈需進行多次大角度轉動,并且要求轉臺提供精準角速度[5]。然而,由于導彈體積、 質量較大,使得現場標定環境無法滿足彈體繞俯仰軸整周旋轉所需空間。因此,傳統的標定方法難以滿足不下箱狀態的導彈慣組標定要求。
針對不下箱狀態的特點,主要標定方法有:(1)通過彈上慣組進行一定幅度的轉動,僅利用彈上慣組自身量測信息完成標定。文獻[6]提出通過轉臺進行多次小姿態轉動,利用重力加速度、 地球自轉角速度對標定參數進行激勵,從而完成彈上慣組的標定,然而地球自轉角速度數量級較小,無法對光纖陀螺的刻度系數誤差、 安裝誤差進行充分激勵,難以保證標定精度; 文獻[7]提出借助彈上慣組中的雙軸旋轉機構,從而避免轉臺的轉動限制,然而雙軸旋轉機構將大大增加彈上慣組的復雜程度與制造成本,難以大規模應用。(2)引入外部信息,用以輔助標定。文獻[8-9]提出通過慣導與GPS進行組合導航,進而完成標定,但是當GPS受到干擾時,將大幅降低標定過程的可靠性; 文獻[10-11]提出利用GPS提供實時精確位置信息,采用“位置”匹配方式,通過Kalman濾波實現彈上慣組的在線標定,但是標定精度嚴重依賴于GPS提供位置信息的精度。
本文提出了一種不下箱狀態的彈上慣組一體化標定方法,在轉臺轉動的限制條件下,設計了一種包含6個靜止位置的轉動路徑,利用彈上慣組自身量測信息進行標定。
1 坐標系定義與轉臺轉動限制
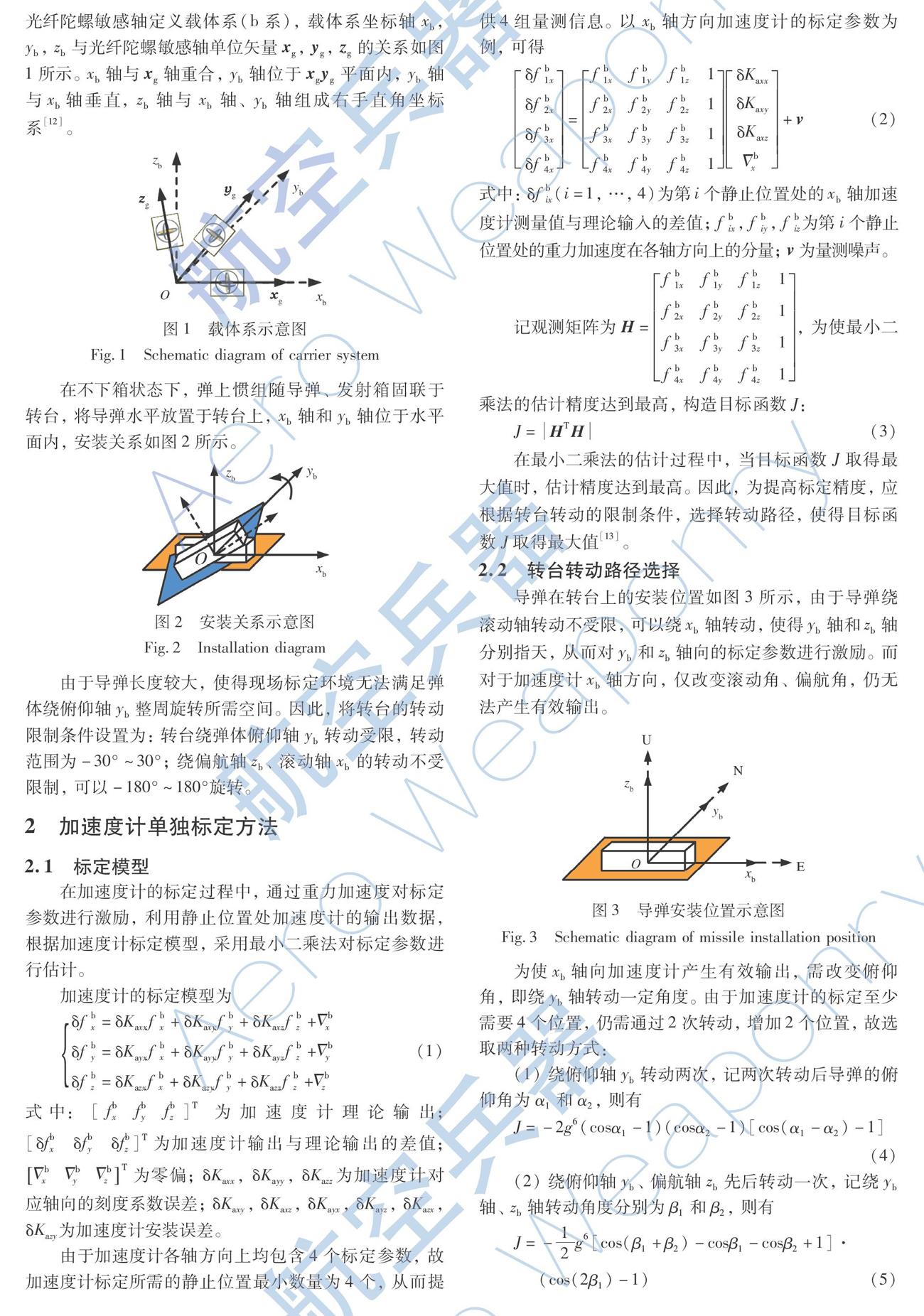
以“東-北-天”地理坐標系作為導航系(n系),以光纖陀螺敏感軸定義載體系(b系),載體系坐標軸xb,yb,zb與光纖陀螺敏感軸單位矢量xg,yg,zg的關系如圖1所示。xb軸與xg軸重合,yb軸位于xgyg平面內,yb軸與xb軸垂直,zb軸與xb軸、 yb軸組成右手直角坐標系[12]。
在不下箱狀態下,彈上慣組隨導彈、 發射箱固聯于轉臺,將導彈水平放置于轉臺上,xb軸和yb軸位于水平面內,安裝關系如圖2所示。
由于導彈長度較大,使得現場標定環境無法滿足彈體繞俯仰軸yb整周旋轉所需空間。因此,將轉臺的轉動限制條件設置為:轉臺繞彈體俯仰軸yb轉動受限,轉動范圍為-30°~30°; 繞偏航軸zb、 滾動軸xb的轉動不受限制,可以-180°~180°旋轉。
2 加速度計單獨標定方法
2.1 標定模型
在加速度計的標定過程中,通過重力加速度對標定參數進行激勵,利用靜止位置處加速度計的輸出數據,根據加速度計標定模型,采用最小二乘法對標定參數進行估計。
4 一種彈上慣組一體化標定方法
通過對加速度計、 光纖陀螺標定方法的分析可知,通過合理設計轉動路徑,將不同的靜止位置、 轉動過程相結合,利用慣組自身量測數據,可一次性完成光纖陀螺的刻度系數誤差、 安裝誤差與加速度計刻度系數誤差、 安裝誤差、 零偏的標定。
4.1 轉動路徑設計
結合加速度計與光纖陀螺的標定方法特點,并考慮轉臺的轉動限制條件,盡可能減少所需位置數量,設計了一種包含6個靜止位置的轉動路徑,如圖5所示。
初始位置選取為“東天南”(EUS),通過連續兩次繞xb軸轉動-90°,對光纖陀螺xb軸向標定參數Kgxx,Kgyx,Kgzx進行激勵。通過連續兩次轉動,使量測模型中安裝誤差Kgyx和Kgzx的系數符號發生變化,從而實現Kgyx和Kgzx的標定。
為避免光纖陀螺yb軸向標定參數Kgzy和Kgyy之間出現耦合,再次繞xb軸轉動90°,初恢復至“東北天(ENU)”位置,使得yb軸成為導彈的俯仰軸。
由于轉臺的轉動限制,因此先繞yb軸轉動-30°,再繞zb軸轉動105°。通過最后的兩次轉動過程以及轉動后的靜止位置,可以激勵光纖陀螺yb和zb軸向標定參數,同時,轉動角度保證了加速度計的標定精度。
4.2 標定參數解算
對于加速度計的標定,利用6個靜止位置處的比力量測為量測信息,對加速度計的刻度系數誤差、 安裝誤差、 零偏進行估計。以xb軸方向加速度計的標定參數為例,6個靜止位置處xb軸方向的加速度計輸出與理論輸出的差值為δf bix(i=1,2,…,6),則δf bix與δKaxx,δKaxy,δKaxz,Δ bx之間的關系式為
根據式(17)~(18)即可實現對加速度計與光纖陀螺的標定。
5 仿真驗證
加速度計的刻度系數誤差為100×10-6,安裝誤差為300″,零偏為100μg,隨機噪聲10μg。光纖陀螺的刻度系數誤差為100×10-6,安裝誤差均為300″,常值漂移為0.1 (°)/h,隨機漂移為0.01 (°)/h。在光纖陀螺刻度系數誤差、 安裝誤差和加速度計刻度系數誤差、 安裝誤差、 零偏的標定過程中,轉臺旋轉速率為10 (°)/s,各個靜止位置的停留時間為3 min,從而對所設計的彈上慣組一體化標定方法進行仿真驗證,并與傳統標定方法中的加速度計“十二位置”標定法、 光纖陀螺角速率標定法進行對比。
彈上慣組一體化方法的加速度計標定結果如表1所示,“十二位置”標定法得到的加速度計標定結果如表2所示。對比表1~2可得,在轉臺轉動受限的條件下,采用彈上慣組一體化標定方法,通過轉動路徑中靜止位置處的比力量測信息,對加速度計進行標定,可取得與“十二位置”標定法相近的標定結果,能夠達到較高的標定精度。
在彈上慣組一體化標定方法中,零偏的標定誤差小于0.05μg,安裝誤差的估計誤差基本控制在0.02%以下。彈上慣組一體化標定方法中的前四個靜止位置與加速度計“十二位置”法相似,分別對yb和zb軸進行兩次激勵。因此,在彈上慣組一體化標定方法的標定結果中,δKayy和δKazz的標定誤差分別為0.032 4×10-6和0.020 9×10-6,與“十二位置”標定法的標定結果接近。另外,由于轉臺轉動范圍的限制,xb軸的激勵程度略低于yb和zb軸,故δKaxx的標定精度低于δKayy和δKazz。
在彈上慣組一體化方法中,忽略常值漂移條件下光纖陀螺標定結果如表3所示。光纖陀螺角速率標定法的標定結果如表4所示。
對比表3~4可知,在彈上慣組一體化標定方法中,δKgyy,δKgzz,δKgyx,δKgzx,δKgzy的標定精度與角速率法的標定結果相似,而δKgxx的標定精度高于角速率法的標定結果,這是由于繞xb軸轉動次數較多,對xb軸向光纖陀螺的標定參數激勵程度較高,從而提高了δKgxx的標定精度。
采用彈上慣組一體化標定方法,光纖陀螺的刻度系數誤差、 安裝誤差可以得到較好的估計,安裝誤差的估計誤差控制在0.5%以下,而刻度系數誤差δKgyy和δKgzz的估計精度略低于δKgxx,主要有兩方面原因:一方面,相較于xb軸,yb和zb軸向光纖陀螺的標定參數激勵程度略低; 另一方面,忽略常值漂移的相關誤差項,使得標定過程中存在模型誤差。
通過雙位置測漂法對常值漂移進行標定后,利用標定結果對常值漂移進行補償,再次對光纖陀螺刻度系數誤差、 安裝誤差進行標定,標定結果如表5所示。經補償后,δKgyy和δKgzz的標定誤差由-2.221 8×10-6和4.024 5×10-6下降至-0.587 8×10-6和0.728 2×10-6,標定精度大幅提升,刻度系數誤差δKgxx,δKgyy, δKgzz的標定誤差控制在1×10-6以內,安裝誤差δKgyx, δKgzx,δKgzy的標定精度也得到一定程度的改善。
6 結? 論
針對彈體不下箱,轉臺繞彈體俯仰軸轉動受限的情況,本文提出了一種不下箱狀態的彈上慣組一體化標定方法。為標定光纖陀螺刻度系數誤差、 安裝誤差和加速度計刻度系數誤差、 安裝誤差、 零偏,根據轉臺轉動的限制條件,設計了一種包含6個靜止位置的轉動路徑。通過轉臺連續轉動,一次性完成標定。由于常值漂移的標定過程需要較長時間以累積誤差量,因此,通過雙位置測漂法,單獨對常值漂移進行標定。仿真驗證結果表明,本文所提方法能夠取得與傳統標定方法相近的標定效果,具有較高的標定精度。
參考文獻:
[1] 程駿超,房建成,吳偉仁,等. 一種激光陀螺慣性測量單元混合標定方法[J]. 中國慣性技術學報,2014(4):445-452.
Cheng Junchao,Fang Jiancheng,Wu Weiren,et al. Integrated Calibration Method for RLG IMU[J]. Journal of Chinese Inertial Technology,2014(4): 445-452.(in Chinese)
[2] Jr Klotz H Z,Derbak C B.? GPS-Aided Navigation and Unaided Navigation on the Joint Direct Attack Munition[C]∥Position Location and Navigation Symposium, 1998.
[3] Emelyantsev G I,Blazhnov B A,Dranitsyna E V,et al. Calibration of a Precision SINS IMU and Construction of IMU-Bound Orthogonal Frame[J]. Gyroscopy and Navigation,2016,7(3): 205-213.
[4] 全振中,石志勇,王毅. 捷聯慣導在線標定技術[J]. 現代電子技術,2012,35(9): 128-131.
Quan Zhenzhong,Shi Zhiyong,Wang Yi. Online Calibration Technology for Strapdown Inertial Navigation System[J]. Modern Electronics Technique,2012,35(9): 128-131. (in Chinese)
[5] Li J L,Fang J C,Ge Sam S Z.? Kinetics and Design of a Mechanically Dithered Ring Laser Gyroscope Position and Orientation System[J]. IEEE Transactions on Instrumentation and Measurement,2013,62(1): 210-220.
[6] 馮志剛,鄒穎. 整彈不開箱的慣導系統射前小姿態標定方法[J]. 中國慣性技術學報,2009,17(1): 33-36.
Feng Zhigang,Zou Ying. Method of Small Gesture Calibration for Inertial Measurement Units without Opening Box Pre-Launch[J]. Journal of Chinese Inertial Technology,2009,17(1): 33-36.(in Chinese)
[7] 王昆明,謝建,周召發,等. 雙軸旋轉捷聯慣導的誤差參數標定方法[J]. 西安交通大學學報,2016,50(10): 153-160.
Wang Kunming,Xie Jian,Zhou Zhaofa,et al. A Calibration Method of Error Parameters for Dual-Axial Rotary Strapdown Inertial Navigation Systems[J]. Journal of Xian Jiaotong University,2016,50(10): 153-160. (in Chinese)
[8] 葛俊,王新龍,車歡,等. 差分GPS/SINS超緊組合在線標定與誤差補償方案設計[J]. 航空兵器,2016(5): 18-24.
Ge Jun,Wang Xinlong,Che Huan,et al. Design of Online Calibration and Error Compensation of Differential GPS /SINS Ultra-Tight Integration[J]. Aero Weaponry,2016(5): 18-24.(in Chinese)
[9] 申亮亮,王新龍. 彈道導彈SINS空中在線標定方法[J]. 航空兵器,2009(2): 3-7.
Shen Liangliang,Wang Xinlong. An In-Flight Calibration Method of Ballistic Missile SINS[J]. Aero Weaponry,2009(2): 3-7.(in Chinese)
[10] 楊玉孔,胡皓. 激光陀螺捷聯慣導的動基座標定[J]. 光學與光電技術,2011,9(5): 79-82.
Yang Yukong,Hu Hao. In-Dynamic Calibration for Laser Gyro SINS [J]. Optics & Optoelectronic Technology,2011,9(5): 79-82.(in Chinese)
[11] Jorgensen M J,Paccagnan D,Poulsen N K,et al. IMU Calibration and Validation in a Factory,Remote on Land and at Sea[C]∥Position,Location and Navigation Symposium, 2014.
[12] 楊曉霞,黃一. 激光捷聯慣導系統的一種系統級標定方法[J]. 中國慣性技術學報,2008,16(1): 1-7.
Yang Xiaoxia,Huang Yi. Systematic Calibration Method for Laser Gyro SINS[J]. Journal of Chinese Inertial Technology,2008,16(1): 1-7.(in Chinese)
[13] 包為民,申功勛,李華濱. 慣性平臺在系統中多位置翻滾自標定方法[J]. 北京航空航天大學學報,2011,37(4): 462-465.
Bao Weimin,Shen Gongxun,Li Huabin.? Investigation on Inertial Platform Multi-Position Rolling Self Calibration[J]. Journal of Beijing University of Aeronautics and Astronautics,2011,37(4): 462-465.(in Chinese)
[14] 董春梅,陳希軍,任順清. 捷聯慣導系統的一種系統級標定方法[J]. 導航定位與授時,2016,3(4): 74-80.
Dong Chunmei,Chen Xijun,Ren Shunqing. Systematic Calibration Method for Strapdown Inertial Navigation System[J]. Navigation Positioning & Timing,2016,3(4): 74-80.(in Chinese)
[15] 嚴恭敏,李四海,秦永元. 慣性儀器測試與數據分析[M]. 北京:國防工業出版社,2012.
Yan Gongmin,Li Sihai,Qin Yongyuan.? Inertial Instrument Test and Data Analysis[M]. Beijing: National Defense Industry Press,2012.(in Chinese)
An Integrated Calibration Method of the Inertial Group on the
Missile without Opening Box
Liu Yu1,Shen Liangliang2,Wang Xinlong1*,Cai Yuanwen3
(1. School of Astronautics,Beihang University,Beijing 100083,China;
2.Beijing Institute of Control & Electronic Technology,Beijing 100038,China;
3. Department of Graduate School,Space Engineering University,Beijing 101416,China)
Abstract: In order to shorten the calibration time and simplify the calibration process,the missile and launch box are jointly involved in the calibration,so as to complete the calibration of the inertial group on the missile without opening box.? However,due to the large volume and mass of the missile,the rotation of the turntable is limited. Based on this,an integrated calibration method of the inertial group on missile without opening box is proposed. According to the limitation of turntable rotation and considering the characteristics of accelerometer and fiber optic gyroscope (FOG) calibration method,a rotation path including six static positions is designed.Through the continuous rotation of the turntable,the accelerometer and FOG can be calibrated together. Due to the short rotation time of turntable,the accumulated error of FOG constant drift is small,so it is difficult to estimate. Therefore, the double position drift method is used to calibrate the constant drift. The simulation results show that the proposed calibration method can achieve the same calibration effect as the traditional calibration method,and has high calibration accuracy. After compensating the constant drift with the calibration results,the calibration accuracy is improved.
Key words: without opening box; limited rotation of turntable; inertial group; rotation path design; integrated calibration; missile
收稿日期:2019-11-21
基金項目:國家自然科學基金項目(61673040);航空科學基金項目(20170151002);試驗技術項目(1700050405);天地一體化信息技術國家重點實驗室基金項目(2015-SGIIT-KFJJ-DH-01) ;重點基礎研究項目(2020-JCJQ-ZD-136-12)
作者簡介:劉宇(1993-),男,黑龍江大慶人,碩士研究生,研究方向為導航、制導與控制。
通訊作者:王新龍(1969-),男,陜西渭南人,教授,研究方向為導航、制導與控制。
