面向電力場景作業機器人的目標檢測方法研究
2021-08-06 08:27:18李晨曦婁根李慧姝方武
現代計算機 2021年18期
李晨曦,婁根,李慧姝,方武
(1.蘇州經貿職業技術學院,信息技術學院,蘇州215009;2.江蘇省智能服務工程技術研究開發中心,蘇州215009)
0 引言
國內外科研工作者對電力環境下物品檢測進行了深入研究,提出了模糊均值方法、K最近鄰方法以及支持向量機等傳統圖像識別方法。上述方法基于簡單的人工特征,當電力環境變化時,識別準確率會大幅下降,算法魯棒性不強。隨著深度學習的興起,國內外學者對深度卷積神經網絡技術(Deep Convolutional Neu?ral Network,DCNN)在電力環境下物品檢測方面開展了研究[1]。相對于傳統方法,DCNN直接將圖像作為輸入,能夠實現圖像中目標特征的自動提取,避免了繁瑣的人工操作,并對圖像具有極強的表征能力[2],顯著提高了電力環境下物品監測的有效性與實用性。
電力機器人對場景中各種目標進行自動檢測是實現這些遠程電力作業功能的首要條件。其中基于深度卷積神經網絡的目標檢測技術是近期最受關注的研究領域[3-6]。然而,現階段視覺目標檢測的研究方法和技術手段需要大量訓練數據及復雜模型,存在數據標注成本太高、實時處理能力不強等問題。其主要原因在于:一是當前深度卷積神經網絡預測模型[7]的高準確性是建立在大數據學習的基礎上,需要大量的標注樣本才能發揮作用,成本非常大;二是作業機器人等嵌入式作業機器人一般采用電池供電,能量和計算能力有限,無法實時運算復雜的神經網絡模型。
人類之所以能夠快速學習的關鍵是人類具備學會學習的能力,能夠充分利用以往的知識經驗來指導新任務的快速學習,稱為小樣本學習(Few Shot Learning)[8]。小樣本學習使得我們可以通過較少的樣本快速持續地學習各種各樣的任務,已經成為增強學習之后深度學習一個重要的研究方向。將基于深度學習的小樣本目標檢測方法應用于電力場景作業機器人系統屬于比較新的研究方向,至今在這方面的研究成果不多。
1 研究進展
近年來,隨著深度學習技術的發展,目標檢測算法從基于手工特征的傳統方法轉向了基于深度神經網絡的方法,例如2013年提出的R-CNN[8]以及近年來Fast/Faster R-CNN[9]、YOLO系列[10-11]、SSD系列[12-15]、Pelee[16]等這些基于深度學習的目標檢測技術。這些基于深度學習的主流算法模型分為One-Stage目標檢測算法和Two-Stage目標檢測算法。其中,YOLO、SSD等典型One-Stage目標檢測算法不需要候選區域階段,可以通過一步直接產生物體的類別概率和位置坐標值。Two-Stage目標檢測算法將檢測問題劃分為兩個階段,第一個階段首先產生候選區域,包含目標大概的位置信息,然后第二個階段對候選區域進行分類和位置精確修改。
在電力場景下,由于光線變化導致傳統算法識別率較低。為切實降低目標檢測所需數據的獲取及標注成本,提升檢測準確率,我們提出建立面向電力場景作業機器人的小樣本目標檢測體系,結構如圖1所示。
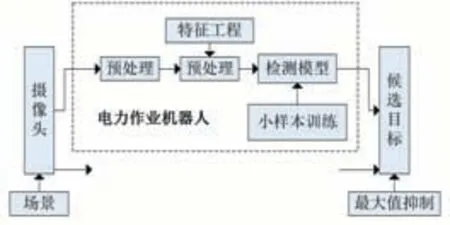
圖1 基于小樣本學習技術的電力場景目標檢測框圖
具體研究方法如下:
(1)首先對機器人采集的圖像進行預處理,采用特征工程確定目標候選區域,減少數據處理量,研究精簡化的卷積神經網絡模型。
(2)綜合考慮計算復雜度、存儲需求,采用適于電力作業機器人的小樣本目標檢測算法。圖2給出了工作原理。
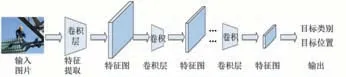
圖2 小樣本目標檢測算法流程圖
2 目標檢測算法
2.1 目標檢測
目標檢測是機器視覺領域的核心問題之一,其任務是找出圖像或視頻中的感興趣物體,同時檢測出它們的位置和大小。本文采用16層深度卷積神經網絡,
首先對輸入圖像進行預處理,將圖像分成13×13塊,然后利用訓練好的卷積神經網絡,在預測框回歸輸出物品的類別和位置。具體方法如圖2所示,首先獲取樣本圖像,然后對樣本圖像進行數據增強處理擴充數據集;對數據集標注,得訓練樣本集;對樣本圖像進行縮放,得子圖像;構建十六層卷積神經網絡模型M;采用通用物品檢測數據庫對十六層卷積神經網絡模型M進行預訓練,得預檢測模型;在預訓練后對檢測模型進行二次訓練,得最終的目標檢測模型。二次訓練的數據為采集和進行數據增強后的訓練樣本集;最后對子圖像處理得目標框,利用目標框對目標檢測模型進行測試。依據電力環境下物品圖像的特點,進一步優化卷積神經網絡的結構與參數,建立一種精簡的物品識別模型,實現電力環境下物品的有效識別。
2.2 數據集
首先采用通用開源數據庫進行深度卷積神經網絡模型的預訓練。通過網絡爬蟲采集圖像3000幅,并采集各種電力場景下圖像12000幅。為了擴大圖像訓練數據集,更好地提取各種條件下物品特征,訓練時避免出現過擬合,如圖3所示,我們對采集的數據集進行一些經典數據增強處理,具體包括圖像亮度、色度、對比度、銳度以及人工加噪聲等多種處理。通過數據增強后,圖像數據集擴充到4萬張。將圖像分辨率縮小為512×512像素,然后對圖像中目標進行人工標注。圖像標注后,隨機選取不同環境條件下的6000幅圖像作為測試集,其余34000幅圖像用于模型訓練。
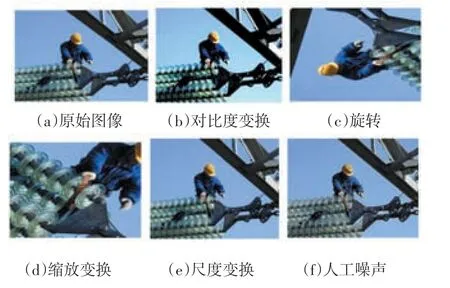
圖3 圖像的數據增強
3 基于DCNN的物品識別技術
3.1 模型
從不同電力環境下采集的圖像中實時目標檢測是一項具有挑戰的任務。深度卷積神經網絡對目標特征具有很好的自學習能力,可用目標的有效識別。我們采用基于區域的DCNN,在卷積層后接入感興趣區域池化層,然后接入全連接層。本文采用的深度卷積神經網絡結構參數如表1所示。

表1 卷積網絡結構參數表
算法模型如式(1)所示。

其中,x為輸入圖像,y為物品分類以及其位置坐標,M為卷積神經網絡模型。網絡由卷積網絡層和最大值池化層組成。卷積網絡用于提取圖像的特征,最大值池化用于選擇重要特征,最后使用訓練好的模型M對圖像中物品進行檢測識別。
3.2 損失函數
模型訓練采用的損失函數如式(2)所示。
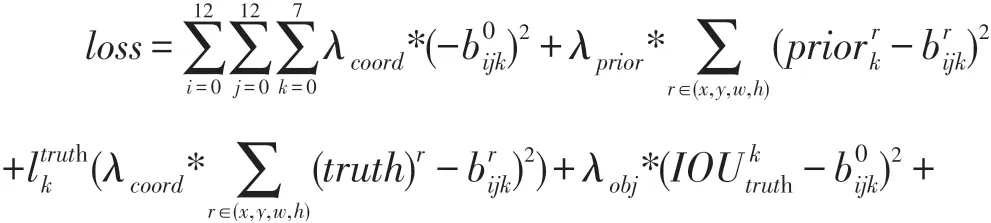

其中λnoobjλpriorλcoordλobjλclass為不同類型的損失函數的權重。noobj是指矩形框里沒有目標,obj是指矩形框里有目標,coord是指矩形框坐標,class目標種類,這里為12種目標,IOU是指疊加區域。
4 實驗
采用TensorFlow 2.0等平臺以及標準開源庫對本文算法性能進行分析實驗。根據試驗結果,調整參數重復實驗。在不同條件下檢驗算法的實際效果,并根據實測結果對算法進行分析以及優化。采用手動調參實現信息的有效處理,當達到精度要求時終止訓練過程。系統平臺參數如表2所示。

表2 PC系統測試平臺參數
本文算法與YOLO、SSD和Faster R-CNN算法準確率以及速度如表3所示。通過對不同尺寸圖像檢測實驗結果證明本文算法在512×512分辨率下準確率方面達到85mAp,優于YOLO和SSD算法,平均提升了8%,略低于目前準確率最高的Faster R-CNN算法。

表3 不同算法準確率比較
5 結語
為解決電網人員生命安全與高強度作業問題,降低工作人員的事故率,針對現階段識別檢測算法存在準確率低、魯棒性不強等問題,本文提出了一種小樣本目標檢測方法研究。實驗證明相對于傳統方法,本文方法在保證速度的前提下,可提升8%的準確率,能對不同環境下物品的進行有效識別。下階段工作是將算法部署到作業機器人上進一步實測并完善。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48