小型地面機器人鏈路通信距離測試方法設計
2021-08-06 06:25:08李建中任國全胡敬坤
火力與指揮控制 2021年6期
謝 輝,李建中,任國全,胡敬坤
(1.陸軍工程大學石家莊校區,石家莊 050003;2.中國華陰兵器試驗中心,陜西 華陰 714200)
0 引言
小型地面機器人可廣泛應用于復雜地形地貌環境下的區域搜索、檢測和目標搜尋,常常采用無線鏈路通信方式,實現移動平臺與控制終端之間的雙向信息交互。在進行小型地面機器人綜合性能評定時,其無線鏈路通信距離也是一項重要性能指標,美軍在地面無人車輛試驗規程中規定,必須進行視距和非視距條件下的通信距離測試[1]。而目前國內關于無人裝備無線鏈路通信距離的測試方法只在文獻[2]中有提及,主要采用模擬拉距法、有線拉距法和現場實測法3 種方式,這些方法均未考慮無線鏈路近地傳播的工作特點,和復雜地形地貌下各種遮擋和反射引起的多徑衰落,因此,無法為復雜環境下小型地面機器人鏈路通信能力的測評提供方法支撐。
1 傳統鏈路通信距離測試方法分析
通信距離是表征機器人系統在規定環境條件下無線鏈路保持穩定工作的重要性能指標之一。GJB5200-2003《無人機遙控遙測系統通用規范》中對無線鏈路最大通信距離測試方法進行了規范,其中模擬拉距法和有線拉距法均以自由空間中無線電傳播模型為設計依據,具體分析如下。
1.1 模擬拉距法
該方法是在無線鏈路收發天線的一端設置步進式信號衰減器,通過在近距離r0處正常收發無線鏈路信號,測得其路徑損耗最大允許值A測,最后將A測與由式(1)計算的衰減量Amax進行比較,也可通過式(2)計算出模擬測試得到的Rmax。依據測試和計算結果,評定被測鏈路最大通信距離是否達到指標要求,當A測≥Amax或Rmax≥R0時判定為合格。

其中,R0為技術指標規定的最大通信距離,r0為鏈路收發天線之間的距離。
1.2 有線拉距法
該方法通過在收發天線兩端端口設置固定信號衰減器A線(模擬線損)和步進信號衰減器A預,并將兩端有線連接形成信號閉環,通過測試得到最大衰減量A測,并將所測值與最大通信距離等效衰減量Amax進行比較評定。測試時步進信號衰減器按式(3)計算預置值。

其中,Pt為發射功率,Sr為接收靈敏度。
1.3 現場實測法
該方法是將在正常工作(飛行)條件下測控鏈路可靠通信的最大有效距離Rmax,與指標規定的最大通信距離R0進行比較評定。
1.4 存在問題分析
比較上述3 種測試方法可以看出,傳統鏈路通信距離測試方法,主要采用自由空間傳播模型進行傳播距離和路徑損耗的等效換算,這種方法對于無人機測控鏈路地空傳播方式基本適用,但在地面機器人測控鏈路通信距離測試時存在以下兩方面問題:
1)傳播損耗模型不通用。自由空間傳播模型默認路徑損耗衰減速率因子n=2,地面機器人測控鏈路屬于近地傳播無線信道,受植被、地形、建筑物遮擋和地面多徑效應影響,信號衰落嚴重[3],通常情況下路徑損耗衰減速率因子n>2,因此,不能采用自由空間傳播模型進行表征;
2)路徑損耗衰減影響程度不明確。自由空間傳播模型不考慮復雜地表環境對路徑損耗的影響,實測法雖然引入了地形、地貌、地物等影響因素,但無法通過測試數據提取表征環境影響程度的衰減速率因子n,也就很難保證測試結果的一致性和可復現性。
2 機器人鏈路通信環境與RF 傳播損耗模型分析
2.1 機器人鏈路通信環境特點
小型地面機器人鏈路通信的收發天線高度低,屬于近地傳播無線信道,作戰使用場景包括開闊野外、山地洞穴、城鎮街區和建筑物內,常處于非通視條件,容易受到山坡、房屋、車輛、土堆、雜草、灌木等地面障礙物的遮擋[4],這些因素導致機器人鏈路通信時會產生嚴重的多徑效應和陰影效應,使信號傳播產生快速的衰落。這種自然環境隨機因素雖然很難進行定量描述,但卻是機器人在復雜使用條件下無法回避的。為了合理設計機器人鏈路通信距離測試方法,有必要對比分析現有RF 傳播模型,選取適用于小型地面機器人使用環境的無線電波傳播模型。
2.2 RF 傳播損耗模型分析
對于被測的機器人鏈路通信系統而言,其信道的技術參數已由設計方案確定,影響其通信距離的主要是路徑損耗。在自由空間中,RF 傳播路徑損耗可由式(4)得到。

上述公式只是理想環境下的路徑損耗計算模型,在實際工程實踐中,研究人員針對不同使用環境,通過增加經驗修正系數,建立了更多的路徑損耗計算模型,如Okumura-Hata 模型、COST231-Hata模型、Walfisch-Ikegami 模型、Egli 模型、Lee 模型、PlaNET 通用模型等[5]。這些模型主要針對現代蜂窩通信特點,適用于收發天線高度在數米到數十米范圍之間、信號覆蓋范圍在1 000 m 以上的無線通信場景,但無法滿足貼近地表、高度在數十厘米左右、傳播范圍在1 000 m 內的收發天線路徑損耗估算的精度要求。為此,科研人員對于近地和近距離條件下無線傳播路徑損耗計算方法進行了深入的研究,建立了更加微觀化和精確化的分析模型,如Motley模型、對數距離路徑損耗模型等。研究驗證表明[5-6],對數距離路徑損耗模型可適用于小范圍(半徑為km級別)內的無線鏈路室內外近地傳播場景,其路徑損耗計算公式為:
PL(d)=PL(d0)+10nlg(d/d0)+Xσ(5)其中,d0和PL(d0)分別為參考距離和參考距離處的路徑損耗,由實測決定,d 為收發天線之間的距離,n為衰減速率,表示路徑損耗隨距離增長的速率,取值范圍為2~5,Xσ表示標準偏差為σ 的正態隨機變量,取值范圍為4~10[7]。對數距離路徑損耗模型表述簡潔,近地傳播條件下的適用性好,可作為小型地面機器人無線鏈路通信距離測試的基礎模型。
2.3 路徑損耗影響因素分析
常用路徑損耗模型均是基于無線電傳播特性進行適當簡化的經驗公式,其適用范圍根據測試系統和環境條件而定,估算精度則取決于對環境參數的識別精度。這些模型雖然不能完全適用于地面機器人通信距離測試,但可以根據一些定性的變化規律,確定影響無線鏈路傳播路徑損耗的敏感因子,這對于小型地面機器人無線鏈路通信距離測試方法的設計和試驗條件的控制,都具有重要的指導意義。相關研究表明,影響小型地面機器人無線鏈路路徑損耗的主要影響因素如下:
1)收發天線距離。該距離的對數與路徑損耗成正比,T-R 距離越大,路徑損耗越大;
2)天線離地高度。對于近地無線傳播,收發臺天線離地高度的對數與路徑損耗成反比,天線越高,則路徑損耗越小;
3)收發天線之間的遮擋物。收發天線之間的障礙物遮擋,會產生繞射路徑損耗,遮擋物越多,損耗越大;
4)傳播區域內的地貌。無線鏈路覆蓋區域內地貌越復雜,傳播路徑損耗越大;
5)收發天線功率。無線鏈路系統發射天線功率越大,覆蓋區域信號越強,有效傳播距離越遠,而接收天線功率越低,信號接收單元越敏感,鏈路有效距離越遠。其中收發功率取決于鏈路系統設計、元件篩選質量、電源功率分配、使用壽命等因素。
3 鏈路通信距離測試方法設計
小型地面機器人鏈路通信距離測試的目的是通過試驗獲取機器人在典型使用環境和工作方式下的鏈路通信極限能力。為了兼顧標準試驗條件下的達標性測試,和極限邊界條件下的摸底性測試要求,在試驗方法設計時,必須將影響機器人無線鏈路路徑損耗的主要因素作為試驗控制的關鍵條件。
根據上述分析,GJB5200-2003《無人機遙控遙測系統通用規范》中的模擬拉距法屬于半開放式的測試方法,其試驗思想本質上是將無線鏈路傳播環境假設為自由空間,無需高標準的試驗場地和條件控制,試驗結果直觀,便于對環境影響因素進行分析,因此,可作為機器人鏈路通信距離測試參考方法。在此基礎上作如下試驗方法設計。
3.1 試驗條件
1)封閉測試場地,清理與試驗預置環境條件無關的人員、遮擋物、反射物等;
2)通過電波監測設備進行掃頻,確保試驗場域內不存在與被測鏈路頻點接近的干擾信號。
3.2 試驗準備
1)在被測鏈路通道發射天線輸出端連接步進式信號衰減器,機器人系統開機并檢測信道是否通暢;
2)根據測試場地條件和鏈路最大通信距離指標R0確定一個合理的最大測試距離dmax,在此距離內按照等距確定不少于7 個測試點di=idmax/k(i=1,2,3,…,k,k≥7),或按照對數等距取di=2i-kR0(i=1,2,3,…,k,k≥7);
3)根據式(1)分別計算出測試點di處步進式信號衰減器預置值A預i=20 lg(R0/di)。
3.3 試驗方法及步驟
1)選定典型試驗環境,將機器人移動平臺放置在距離機器人控制站di(i=1,2,3,…,k,k≥7)處,并將步進式信號衰減器衰減值設置為A預i。發送遙控指令,使其任務載荷工作,同時接收遙測信息;
2004年末,鶴壁市的城市規劃局也頒布了關于建筑外部造型和市面色彩規劃的管理通知。同年,南京市也召開了城市色彩建設研討會,最后把淡綠色定為南京城市的基礎色調。
2)操縱控制站向機器人發送遙控指令,使其任務載荷工作,同時接收遙測信息。按1 dB~2 dB 的步幅增大(或減小)衰減值,觀察機器人指令收發情況和遙測信息。直至其中一個鏈路的誤碼率或丟包率超出指標規定值,記錄此時衰減值Aij,轉動機器人移動平臺方位,重復采樣不少于40 次。
3.4 數據處理方法
將測試所得的各位置點處的信號衰減值Aij取算術平均得Aˉi,然后得到一組數據(di,Aˉi),(i=1,2,3,…,k,k≥7),由于在鏈路最大通信距離實測值Dmax處,鏈路接收端的信號強度剛好達到天線接收靈敏度,此時信號衰減器衰減值為0,由式(5)可以得到:

最后代回計算,可以得到路徑損耗衰減速率n=-a/10 和鏈路最大通信距離實測值Dmax=10-b。
3.5 結果評定
在指標評定時,可根據指標規定的環境條件下最大通信距離實測值Dmax與指標值R0的比較判定結果是否達標。
在復雜條件下通信距離摸底時,可根據典型任務剖面構建不同的測試環境,通過測試各種典型環境下的Dmax,分析機器人無線鏈路通信的極限能力。
4 實測驗證與結果分析
某小型地面機器人遙測頻率為580 MHz,最大通信距離設計值為1 200 m,為驗證上述方法,以該機器人遙測鏈路為測試對象,按該方法測試其在典型環境下的鏈路通信能力。
4.1 測試條件設置
根據小型地面機器人的工作環境特點,分別設置開闊道路、街區和室內3 種典型環境測試,同時兼顧其使用方式,確定以下3 種測試條件:
1)開闊道路條件
主要考慮在光學通視條件下,對比不同天線高度和不同地物下的鏈路信號傳播差異性。試驗時移動平臺在地面行駛,天線基座高度為0.3 m,而操控端電臺根據工作方式的不同,分別設置將電臺置于地面和直立背負電臺兩種方式,對應天線基座高度為1.5 m 和0.4 m。地物影響主要考慮在通視條件下,水泥道路兩側為低矮草叢和中等密度樹木兩種情況的對比,按照100 m 等距選擇測試點,如圖1所示。

圖1 開闊道路條件下測試示意圖
2)街區條件
主要考慮普通多層建筑物遮擋的影響,分析建筑物遮擋對路徑損耗的影響。限于測試場地條件,選擇南北方向連續排列的6 棟磚混砌體結構居民建筑物進行測試,按照等樓間距選取測試點,如圖2 所示。

圖2 街區條件下測試示意圖
3)室內條件
主要考慮多層建筑內樓層遮擋的影響,分析間隔樓層數對路徑損耗的影響,選擇11 層鋼筋混凝土框架結構居民建筑物進行測試,按照等樓層間距選取測試點,如圖3 所示。

圖3 室內條件下測試示意圖
4.2 測試結果分析
將測試數據按3.4 中的方式進行處理,并按式(5)計算出各種典型環境條件下測試點的路徑損耗值,將其與距離對數對應,顯示如下頁圖4 所示。
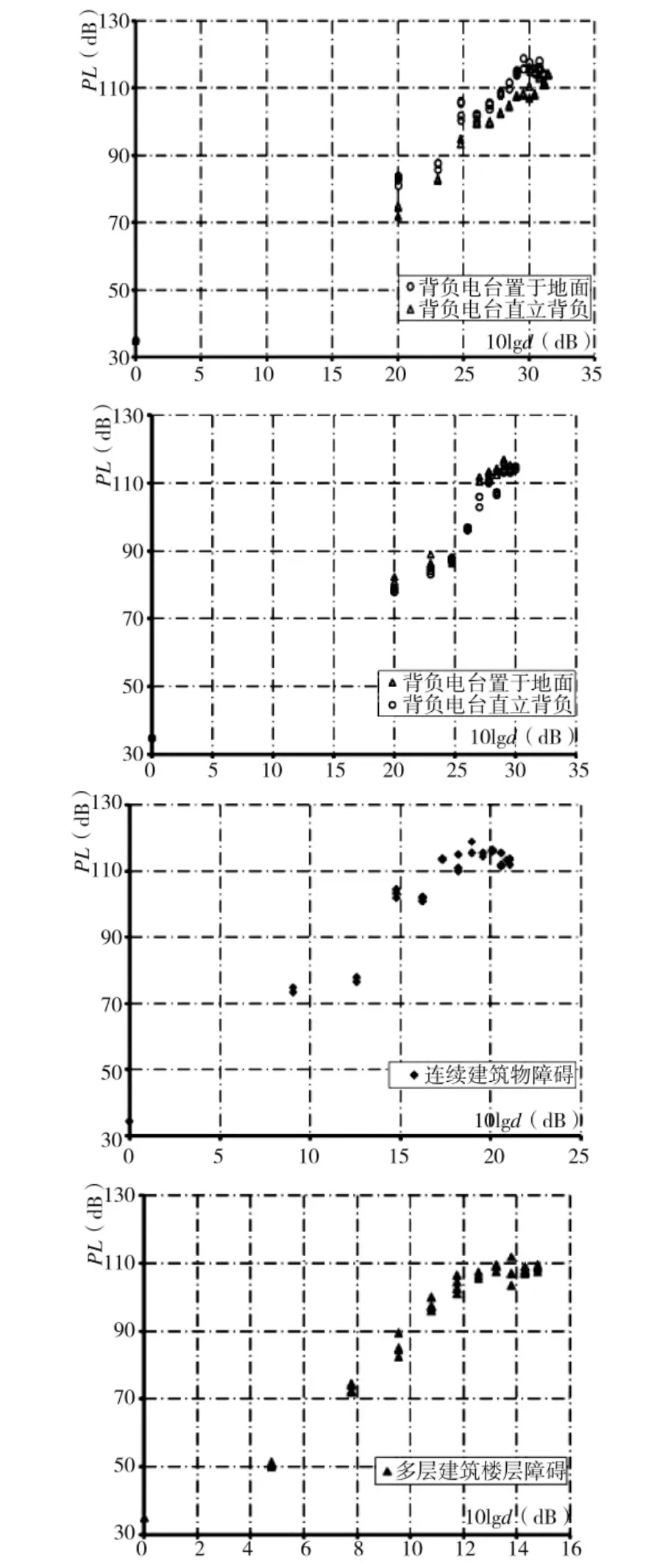
圖4 典型環境下的路徑損耗圖
計算可以得到各種典型環境下的傳播模型參數如表1 所示。
通過表1 可以看出,通視條件下該機器人遙測鏈路最大通信距離基本都能達到指標值,只有在道路兩側有高大樹木時對鏈路傳播影響明顯,通信距離未達到設計值;同時,電臺高度對無線通信距離測試結果影響明顯,不同環境下路徑損壞衰減因子變化也十分顯著。

表1 典型環境下的回歸參數歸納表
通過驗證試驗表明:
1)環境條件對機器人無線鏈路通信距離測試結果影響顯著,本文設計的測試方法能夠通過測試數據,計算出不同環境條件下路徑損耗衰減速率因子n,可用于分析無線鏈路通信距離測試時不同環境的復雜性,并定量表征出其差異性;
2)新方法測得不同環境下的衰減速率因子變化顯著,且正態隨機變量Xσ波動符合模型要求,證明該測試方案和擬合方法合理可行,不僅能夠用于規定標準環境條件下機器人無線鏈路最大通信距離測試,也可用于復雜環境條件下的無線鏈路通信距離極限能力摸底測試。
5 結論
本文圍繞小型地面機器人鏈路通信距離測試問題,通過對比傳統測試方法,結合RF 傳播損耗模型特點及路徑損耗主要影響因素分析,指出了傳統測試方法無法適用于地面機器人鏈路通信距離測試的原因。根據地面機器人鏈路通信近地傳播的特點,在傳統測試方法的基礎上,選取對數距離路徑損耗模型,設計了適用于地面機器人的鏈路通信距離測試方法。利用新方法在某型機器人樣機上進行了開闊道路、街區和室內3 種典型環境下的實地測試。試驗結果表明,該方法合理可行,衰減速率因子的變化,可定量表征出被測機器人在不同環境下鏈路通信環境的差異性,新方法可適用于復雜環境下機器人鏈路性能測試評估。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
光學精密工程(2016年6期)2016-11-07 09:07:19
