北斗衛星導航系統在一體化智能安全頭盔中的應用
2021-08-07 05:49:04曹宇唐小波宋育澤王寧魯洪江
全球定位系統 2021年3期
曹宇,唐小波,宋育澤,王寧,魯洪江
(1.上海海洋大學 工程學院,上海 201306;2.上海海洋可再生能源工程技術研究中心,上海 201306)
0 引 言
工作現場的線路巡檢和故障檢查一般采用人工定期巡視.由于操作人員業務能力參差不齊,很難實時解決問題.如果能在操作人員的安全頭盔內安裝集成需要的傳感器及控制器,將現場故障數據遠程傳送到控制臺,再由高級技工診斷解決問題,可以大大提高故障處理效率.另外,現階段安全頭盔設計簡單,功能單一,如果加裝北斗衛星導航系統(BDS),可實現操作人員工作狀況的目標定位和監測數據傳輸,實現控制臺對操作人員工作環境實時安全評估、軌跡追蹤及災害預警功能.
BDS 以其獨有的短報文通信功能,成為全球首個通信一體化的衛星導航定位系統,在電力行業、海上作業、航空安全、燃氣等領域應用十分廣泛[1].崔秀芳等[2]設計了一種基于BDS 的仿生機器魚,郭英起等[3]設計了一套基于BDS 海洋上冰山蹤跡監測方案.本文設計了一種一體化智能安全頭盔,以BDS的無線電測定業務(RDSS)工作模式,采用定制的數據通信協議,實時定位頭盔位置,傳輸各類傳感器采集到的數據以及用戶指令[4],建立了基于BDS 的一體化智能安全頭盔監測與評估系統.利用頭盔布置的各類傳感器,將一氧化碳(CO)濃度、溫度、濕度等參數通過BDS 短報文功能傳輸到用戶終端,將采集到的數據轉化成參數并形成監測曲線與預警信號,對操作人員所處環境進行實時監測與風險評估,通過追蹤操作人員的工作軌跡,給操作人員提供路線導航.
1 一體化智能安全頭盔結構設計
1.1 硬件設計
一體化智能安全頭盔由頭盔主體、攝像頭、紅外傳感器、濕度傳感器、CO 濃度傳感器等模塊組成,結構圖如圖1 所示.通過在頭盔主體的前方設置固定攝像頭,對人員身份進行識別,也對故障情況進行實時展示,AR 眼鏡能把工程師的操作以及大數據處理方案顯示出來.如果工作途中遇到不可抗力導致通訊中斷,也可在工作人員操作下保存數據到內存卡中,以便后續進行研究分析.頭盔主體前方的應急燈能夠實現照明,功能模塊可探測環境溫度以及對操作人員進行體溫測量.此外,位置模塊能通過BDS 對操作人員進行定位以及相對高度進行定位,確保操作人員的安全,企業還能夠遠程了解員工的狀態,環境數據檢測模塊能對空氣中的CO 濃度或其他可燃氣體進行檢測,用語音進行預警,充分保障操作人員的人身安全,使用簡單便捷.
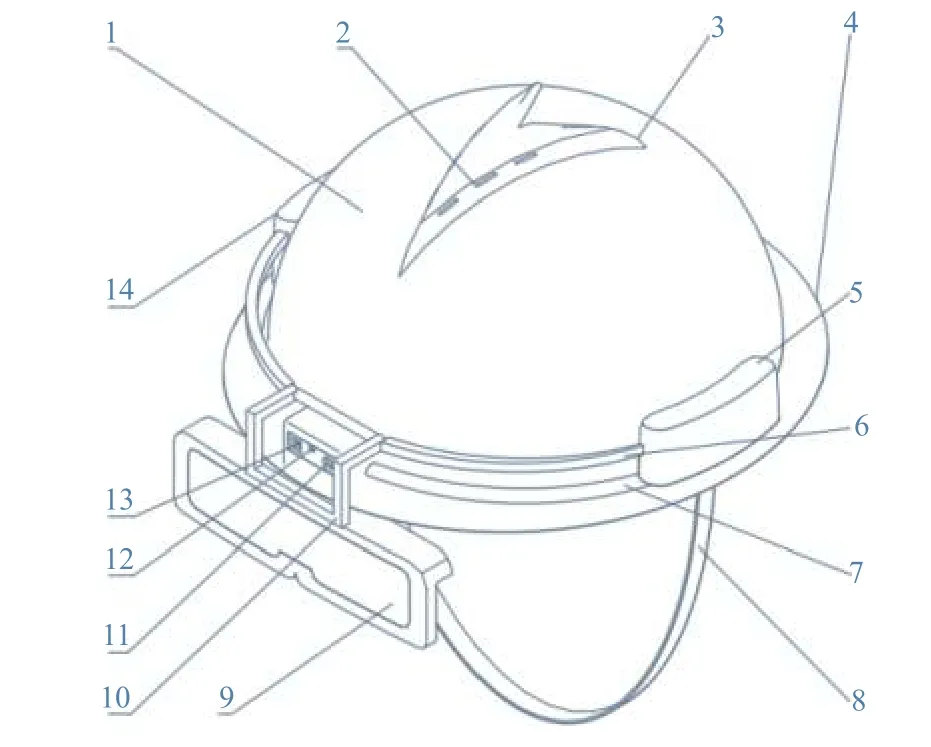
圖1 一體化智能安全頭盔結構圖
1.2 安全評估系統控制流程設計
安全評估系統控制采用紅外傳感器成像測溫,采用濕度傳感器可監測環境溫度.環境傳感器主要監測CO 濃度和一些有害氣體,如果超過閾值就會亮起黃燈并發出蜂鳴,然后經過大數據的對比分析,如果確定會對操作人員產生危害,就會亮起紅燈,并進行語音提示,讓操作人員遠離危險源,如果沒有危害,則會亮起綠燈,具體流程如圖2 所示.
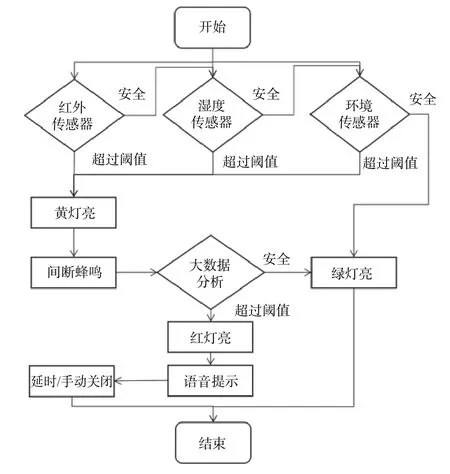
圖2 一體化智能安全頭盔控制流程圖
1.3 一體化智能安全頭盔電路板設計
一體化智能安全頭盔電路板設計采用Proteus 軟件進行搭建,硬件主要由ARM 微處理器、溫度采集模塊、CO 濃度采集模塊、北斗通信模塊、三色LED 指示燈模塊、濕度采集模塊、語音模塊等組成.北斗通信模塊與各種傳感器之間采用RS232 串口通訊,數據庫、云端服務器、監控客戶端使用網絡方式連接服務器,完成對北斗用戶端數據的接收、存儲和控制.北斗通信模塊的RX0 和TX0 輸入輸出接口,與主控制器采用RS232 串口通信,波特率為115 200 bit/s.電源接口包含用于模塊接收的VCC 和用于模塊發射的VCCPA.接收狀態工作電壓為4.2~5.2 V,發射狀態工作電壓為4.9~5.2 V.此模塊可實現RDSS 定位、短報文通信等功能,模塊接口協議滿足BDS 4.0 協議[5],其原理圖如圖3 所示.
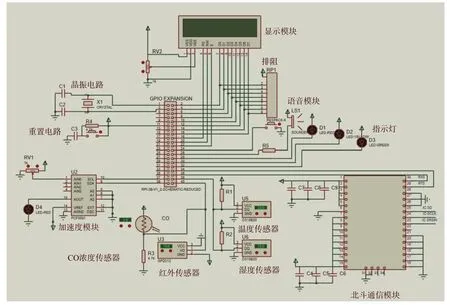
圖3 部分控制原理圖
2 BDS 通信功能工作原理
BDS 在1994 年開始研制,發展至今,已經成為與美國的全球定位系統(GPS)、俄羅斯的格洛納斯(GLONASS)、歐盟的伽利略定位系統(Galileo)并駕齊驅的四大全球定位系統之一[6].BDS 具有RDSS 和衛星無線電導航業務(RNSS)兩種業務體制,不但具有GPS 等系統的RNSS 功能,還具有短報文通信和位置報告服務功能[7].BDS 的主要功能有:定位、導航、單雙向授時、短報文通信;數據格式有:ASCII 碼、BCD 碼;定位精度優于10 m;測速精度為0.2 m/s;授時精度為20 ns;短報文通信容量為120 byte.
BDS 由空間段、地面段和用戶段三部分組成[8-11],其定位工作流程為:地面段發射數字信號到地球靜止軌道(GEO)衛星,GEO 衛星接收地面發射信號后,通過轉發器傳輸加密信息到用戶段,用戶對GEO 衛星所發出的信號進行反饋;地面段接收到用戶信號后對這個信號進行解碼,將處理后得到的數據發送給GEO衛星,GEO 衛星接收用戶的坐標數據,將數據反饋給用戶,用戶需要將GEO 衛星導航電文從GEO 衛星信號中解碼出來,通過算法計算用戶段當前所處的位置,便可完成整個定位過程.
短報文發送信號首先是將包含接收方ID 號和通訊內容的通訊申請信號加密后,通過GEO 衛星轉發入站;地面中心站接收到通訊申請信號后,經解密和再加密后加入持續廣播的出站廣播電文中,經GEO衛星廣播給用戶;接收方用戶機接收到出站信號,調解解密出站電文,完成一次通訊傳輸.短報文通訊的傳輸延遲大約是0.5 s,通訊的最高頻率是1 s/次.
3 BDS 在一體化智能安全頭盔系統中的功能實現
3.1 客戶端功能實現
3.1.1 操作區實時視頻展示
以實時動態的方式展示一線操作人員的真實工作場景,可通過頭盔的前置攝像頭和通訊傳輸完成可視化展示.對操作人員的各種技術動作進行捕捉,遠程技術專家可以進行語音指導,支持夜間光照、通訊中斷自行存儲數據,實現各種惡劣條件下的基礎功能完善,對操作區實現監測系統可視化展示,具有空間導航、危險預警和動作糾正的功能.
3.1.2 操作區環境狀態監測數據展示
整合多種故障資源,通過一體化智能安全頭盔的溫度傳感器、氣體監測設備、各種不同類別環境傳感器等采集的環境數據為支撐,綜合運用大數據處理、遠程會診等技術,實現對操作人員工作區內溫度、濕度、CO 濃度及其他有害氣體等環境狀態的實時動態監測,重點對操作人員的行動軌跡進行跟蹤,提供地圖導航,為操作人員工作區范圍內環境變化情況分析提供底層基礎數據,方便給各種實際應用提供開放式數據支持.
3.1.3 操作區安全預警與評估
基于一體化智能安全頭盔相關傳感器對操作區CO 濃度、溫度、濕度及其他有害氣體的實時監測數據,構建操作人員與環境一體化的環境安全監測體系和危險預警體系.
利用傳感器實時采集數據、人員軌跡信息、所處空間分析信息等,對線路巡檢過程中可能出現的短路、觸電、火災事故等實施災害快速預警,為實現快速科學處理故障、應急救援和預案快速實施等突發處理提供可視化解決方法.整體系統分為用戶部分和遠程監控部分,用戶部分包括各種傳感器和BDS 用戶端機及外圍設備、PC 端和手機端;遠程控制部分包括BDS 用戶端機、監控客戶端、防火墻、云服務器、數據庫、服務器.系統結構圖如圖4 所示.客戶端功能圖如圖5 所示,客戶與服務端體系結構圖如圖6 所示.
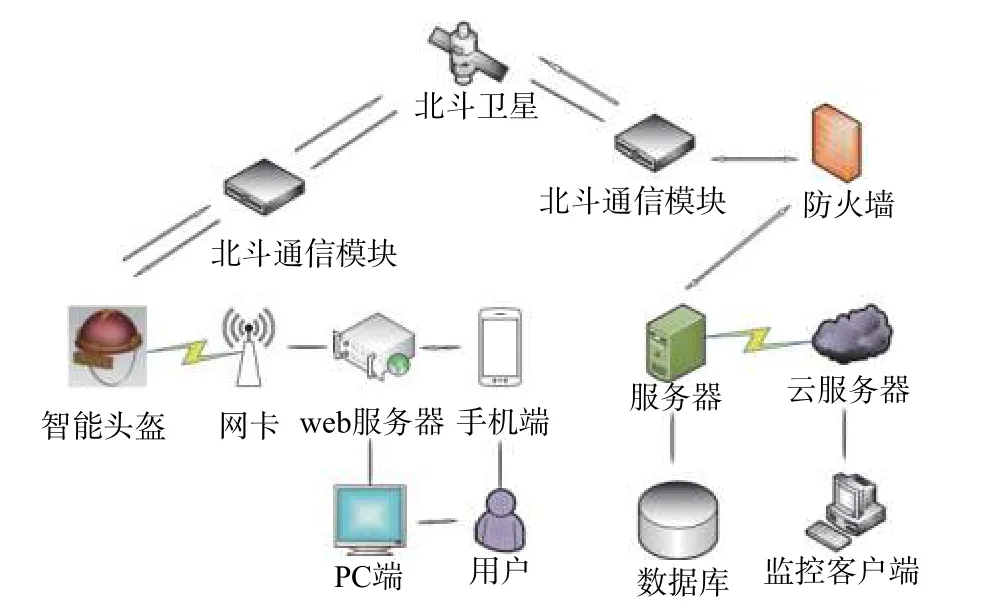
圖4 系統結構圖
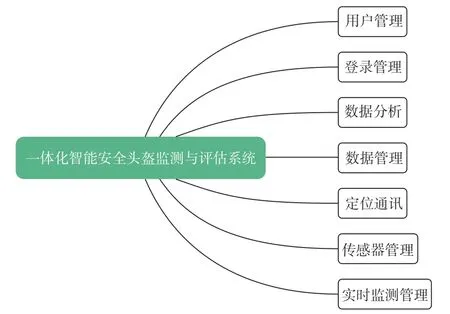
圖5 客戶端功能圖
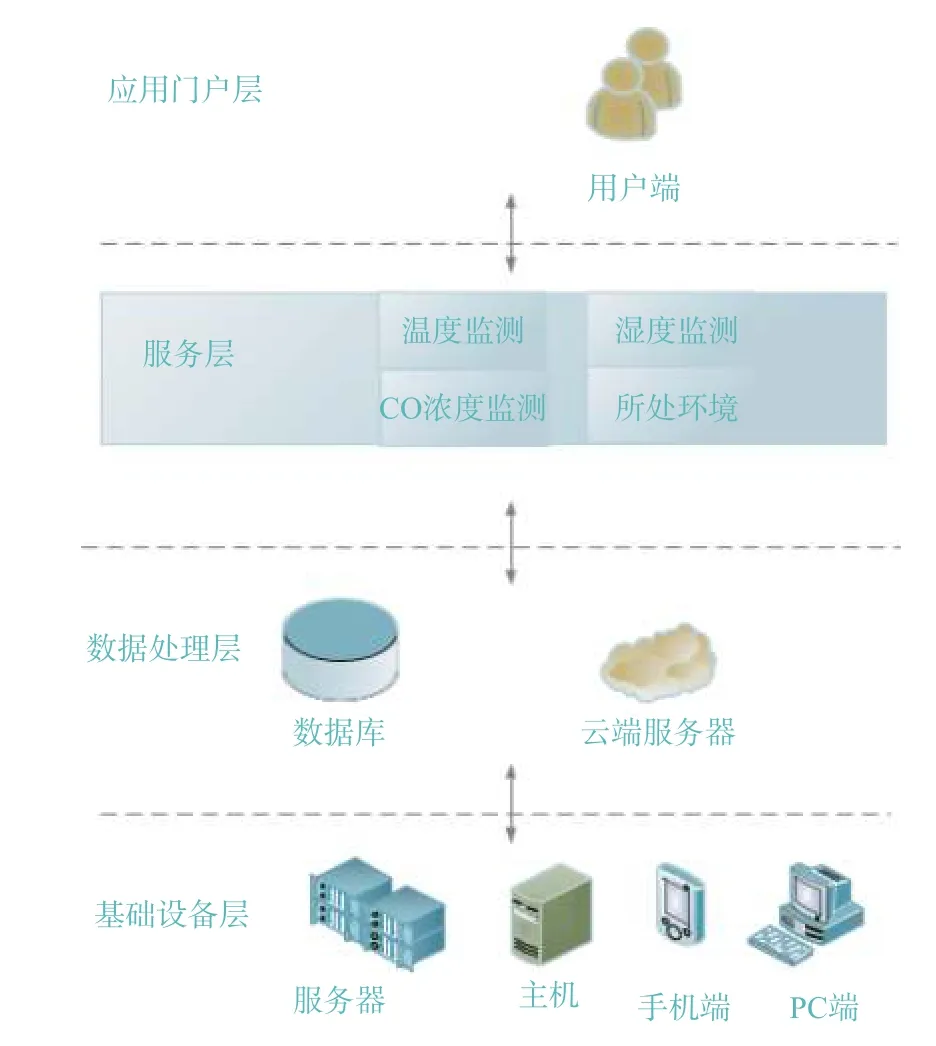
圖6 客戶端與服務端體系結構圖
3.2 通信協議設計
利用北斗短報文功能,采用北斗三號(BDS-3)的RDSS 模式下的短報文功能單次報文容量最大為408 byte,報文頻度為1 min,RDSS 模式具備的定位加雙向短報文的特點以及性比高、安全可靠等優點是本設計選擇BDS 的原因.但RDSS 模式下北斗短報文容量有限制,所以需要合理地設計通信協議,在不超出容量的同時,盡可能地保證通信的質量,得到最優的通信數據[12].一體化智能安全頭盔設計系統時定制了一套傳輸協議,在每組數據中都包含頭盔ID,從而確認數據來源,數據的反饋也必須驗證數據是否被接收完畢,如果沒有得到反饋將會重新發送數據,循環5 次,再發送下一條數據.具體的通訊內容如表1 所示.
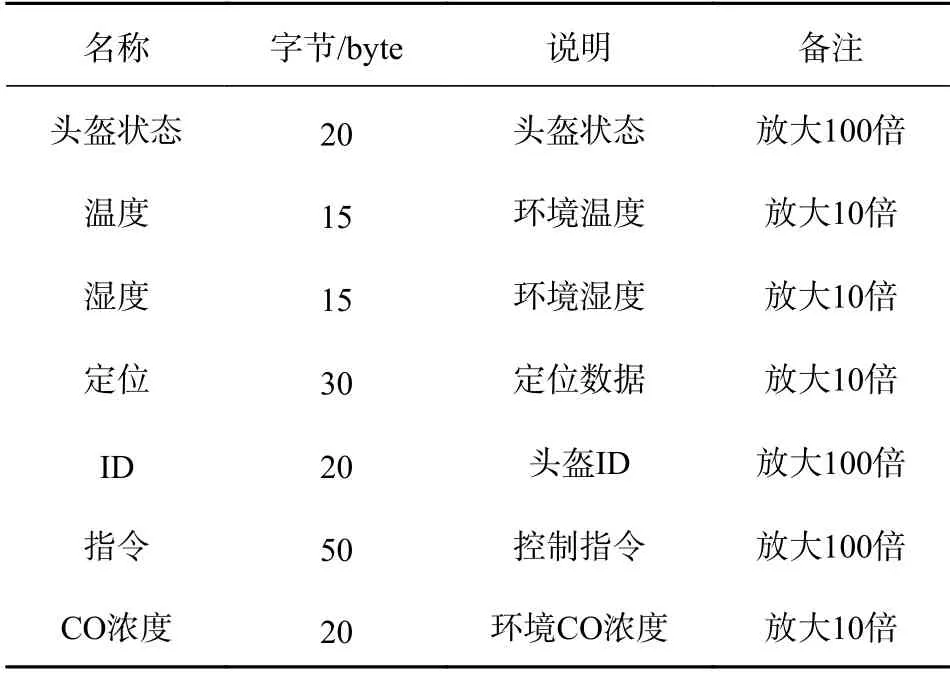
表1 BDS 衛星RDSS 短報文數據傳輸內容說明
4 BDS 在一體化智能安全頭盔系統中的操作程序設計
基于QT designer 虛擬融合技術,借助C++語言編寫能與BDS 電腦端控制系統進行直接通信的數字化程序,一體化智能安全頭盔電腦端軟件登錄界面如圖7 所示.通過智能頭盔采集的傳感器監測數據可以完整地展示在電腦或者手機界面上.在用戶端,傳感器傳輸的數據可以實現對CO 濃度、溫度、濕度、所處環境實際情況的實時監控,通過對CO 濃度的監測,以防有害氣體滲漏造成操作人員中毒,并且能夠對溫度、濕度的異常狀態進行預警分析,如圖8 所示.
圖7 系統登錄界面
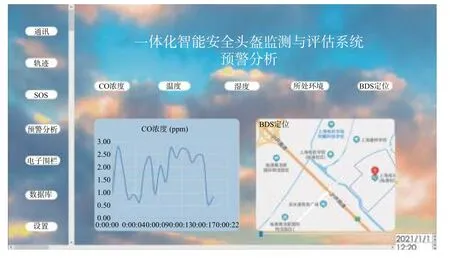
圖8 系統主界面
5 結束語
本文設計了一種基于BDS 定位功能一體化智能安全頭盔,實現對操作人員的軌跡追蹤;基于BDS 通信功能,對工作環境進行了有害氣體、溫度及濕度的數據傳輸,通過服務器分析產生預警,從而保障操作人員的人身安全;基于BDS 遠程數據傳輸功能,輔助操作人員對故障進行處理,結合大數據分析故障的成因.下一步的研究重點是提高定位精度,提升通信質量,結合人工智能與大數據,采用深度學習的方式進行優化和改進.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國科技論壇(2017年7期)2017-07-25 08:49:53
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
創業家(2015年5期)2015-02-27 07:53:25
