超聲檢測在路側泊車收費設備中的設計?
2021-08-08 11:16:26李向榮宋志遠焦學
計算機與數字工程 2021年7期
李向榮 宋志遠 焦學? 劉 微
(青島科技大學機電工程學院 青島266061)
1 引言
路側泊車收費設備判斷車輛是否駛入車位,通常采用視頻實時檢測及激光檢測,存在功耗過高、精度保持性不高等缺點。本方案中超聲波傳感器利用其測距原理檢測車輛,功耗較低、精度保持及抗干擾能力較強。當超聲波傳感器檢測到車輛時,開啟設備對車輛進行實時收費。在目前的超聲波應用項目中,大多采用51單片機作為處理芯片以及收發分體式探頭,51單片機內部資源有限,在發射和處理超聲波信號時需外接晶振、ADC電路、溫度補償電路等,同時收發分體式探頭測距角度范圍較小,在寬角度多路測量方面不能很好地應用而且體積較大,不適合設備的小型化發展[1~2]。而本方案可直接通過E524.09內部振蕩器發出脈沖信號,STM32單片機直接利用其內部時鐘源HSI RC進行工作,無需外接晶振,在回波處理上采用超聲波信號處理芯片E524.09以替代復雜的放大、轉換、數字處理電路,以及可利用STM32單片機內部ADC進行模數轉換,由此簡化了回波處理電路、避免占用設備更多的空間。
2 超聲波傳感器及測距原理
本文采用壓電收發一體式超聲波探頭ST-213W進行超聲波信號的發射和接收,可將電能轉換聲能,也可將聲能轉換成電能[3~4]。當超聲波探頭在發射超聲波時,施加高強度的脈沖電壓作為激勵,使壓電晶片產生振動。雖然脈沖持續時間很短,但激勵結束后,超聲波探頭上仍存在部分余振。此時若立即轉為接收模式,接收端誤將此余振波當成回波從而產生測量干擾,該現象為通常稱為“拖尾”,即產生盲區[5]。因此,當發射模式結束后延遲一段時間,避開余振時間后再進行接收回波信號。收發一體式超聲波探頭的盲區通常比收發分體式探頭盲區大很多,當車輛距離路側的智能泊車檢測設備過近時,會造成設備無法識別車輛進入車位,從而造成設備無法啟用進行識別繳費。因此需減小盲區,可從軟件和硬件方面予以入手。
超聲波測距方法有相位檢測法、聲波幅值檢測法和渡越時間檢測法等[6~7]。因渡越時間檢測法不管在軟件還是硬件上都相對容易實現,故此設計選用渡越時間檢測法來進行超聲波檢測。渡越時間檢測法,其原理是計算超聲波從發射經過空氣等介質后,到遇障礙物反射回來時間,時間與當前溫度下的聲速相乘即為距離。而聲速在不同溫度下數值不同,可通過式(1)確定聲速:
c=331.45+0.61*T(1)其中,T為環境溫度,通過STM32單片機讀出。
3 總體結構設計
路側泊車收費設備的超聲波檢測基于超聲波測距原理,該系統由STM32單片機、收發一體式探頭、發射電路、信號處理電路等構成。系統以STM32單片機為核心,利用其自帶的ADC模塊確定渡越時間,利用自帶的溫度傳感器監測溫度,通過軟件程序進行相應溫度補償。主要流程為首先STM32單片機發出工作指令,當E524.09 IO線收到指令后,由其內部震蕩器發出24個頻率約52kHz的脈沖信號,驅動超聲波傳感器激勵出超聲波,遇到車輛后反射回來,經超聲波傳感器的壓電轉換原理,將反射的回波轉換為電信號,經信號處理芯片后進入STM32單片機ADC通道,信號處理結果通過串口發送至泊車系統主控芯片DSP[8]。超聲波檢測框圖如圖1所示。
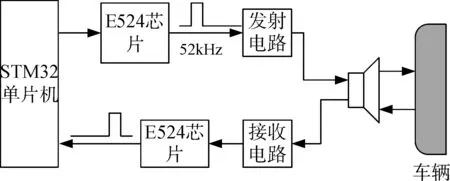
圖1 超聲波檢測框圖
4 硬件設計
4.1 超聲波驅動和信號處理器E524.09
超聲波芯片E524.09是德國ELMOS公司推出的用于汽車超聲泊車輔助系統的超聲芯片。除了距離測量功能外,芯片還支持靈敏度時間控制(STC)、自動閾值生成(ATG)、近距離閾值生成(NFTG)和FTC算法等。芯片內部集成了驅動器、濾波放大器、回聲檢測以及溫度傳感器等,極大節省減小了硬件電路及軟件程序的復雜性,許多配置可通過通信接口快速實現,并可評估接收到的回波信號。芯片回聲峰值檢測優化了短程和長程性能,顯著改善距離測量精度[9]。
為便于評估和調試,相關特征參數如處理后的回波值(包絡數據)和閾值曲線可通過IO口以數字或模擬形式讀取,此功能將在本文第5章節實驗結果分析部分進行體現。
4.2 超聲波發射電路
在超聲波發射電路工作時,首先由STM32單片機發出指令,電平轉換電路Q2及外圍電路將電平轉換至12V,當超聲波芯片E524.09 IO線接收到指令后,其內部震蕩器發出頻率24個連續的頻率為52kHz的脈沖信號,經換能器驅動模塊,最終通過變壓器作用到超聲波探頭上[10~12]。變壓器主要作用升高脈沖電壓信號,并使超聲波芯片的輸出阻抗與傳感器的負載阻抗相匹配。超聲波發射電路如圖2所示。
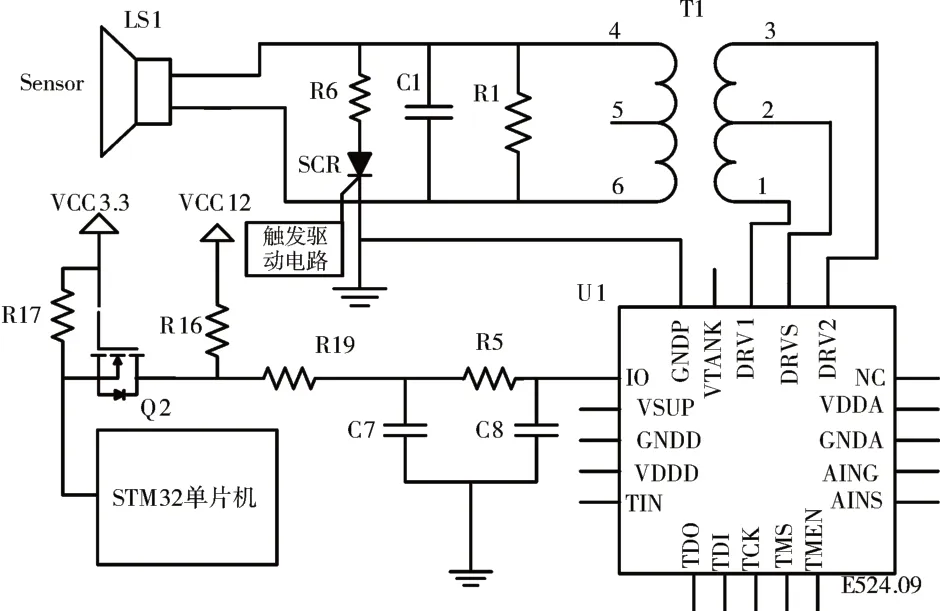
圖2 超聲波發射電路
另,在本文第1章節超聲波傳感器原理中闡釋了收發傳感器存在較大盲區,可在硬件電路中可通過增加回路的衰減系數來減小盲區,因此在電路中接入電阻R6和SCR晶閘管。通過控制晶閘管的開關來控制R6接入回路,從而消耗掉傳感器的能量,從而減小余振的影響。
用示波器測量得出超聲波傳感器發射信號如圖3所示,檢測得到24個脈沖信號,頻率為53kHz,峰值為100V。
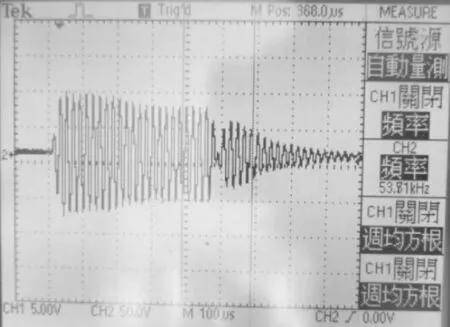
圖3 超聲波探頭發射信號
4.3 超聲波接收、放大和濾波電路
在目前超聲波應用中,對于回波信號通常設計有比較整形電路、放大濾波電路等,造成電路復雜,穩定性差等缺點[13~15]。針對該系統,采用上述超聲波驅動信號處理器E524.09,E524.09內置濾波器、放大器、回聲檢測等,無需外置復雜接收電路,僅通過通信接口即可快速實現回波處理,大大降低了電路復雜性。
回聲信號經E524.09處理后,流入兩級電壓跟隨器。電壓跟隨器輸入阻抗高,輸出阻抗低,電路中起阻抗匹配作用,使前級電路有效驅動負載能力增大,ADC采樣的電壓值更接近理想值。故采用雙集成運放LM358完成阻抗匹配。另D2、D7為鉗位二極管,構成鉗位電路,電壓被鉗制在+0.7V~-0.7V之間,起過壓保護作用。R9、R10為分壓電阻,因STM32單片機工作電壓為3.3V,故將輸入信號由12V降壓至3.3V左右。超聲波信號接收處理電路如圖4所示。

圖4 超聲波信號接收處理電路
超聲波傳感器接收到微弱的回波信號經E524.09芯片進行放大、濾波處理,然后經LM358阻抗匹配后通過示波器進行檢測,信號顯示如圖5所示。通過示波器檢測出的信號可知,超聲波回波信號峰值達到3V左右,說明回波信號的處理達到STM32單片機ADC通道的接入要求。
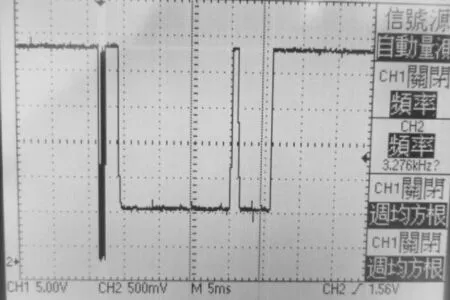
圖5 接入單片機ADC的回波信號
4.4 電源電路設計
智能泊車檢測器供電為5V直流電,而STM32單片機供電電壓為3.3V、超聲波芯片工作電壓為12V,故需要進行5V-12V/5V-3.3V電壓轉換。電源電路設計采用電源管理芯片DC-DC和LDO。U10為低功耗DC-DC升壓轉換器,對應完成DC-DC升壓電路;U3為低壓降穩壓器(LDO),對應完成LDO穩壓電路。D6為肖特基二極管,此處做整流二極管。C88、C89為電源濾波電容,降低脈動電壓的脈動程度。C87、C38為旁路電容,用來濾除高頻干擾。DC-DC升壓電路如圖6所示,LDO穩壓電路如圖7所示。
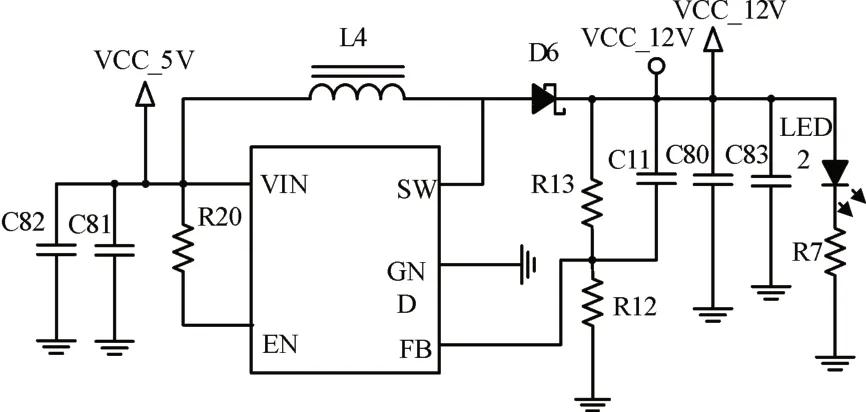
圖6 DC-DC升壓電路
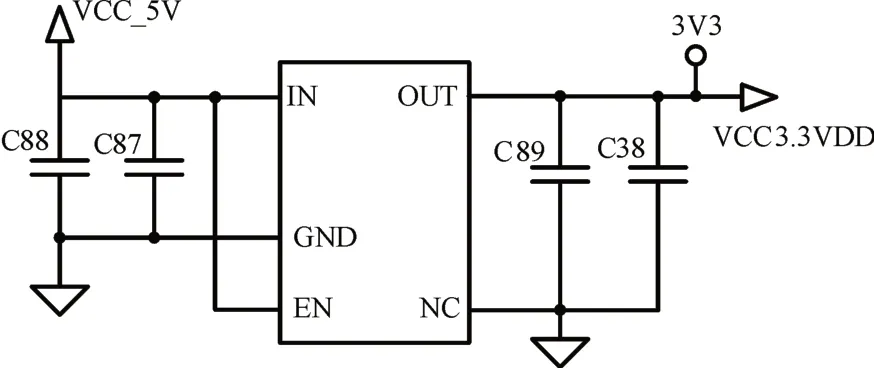
圖7 LDO穩壓電路
5 軟件設計
軟件設計以STM32單片機為核心,實現對主程序、溫度采集子程序、回波接收子程序、定時器中斷子程序、距離計算子程序等各模塊的控制和響應。軟件流程如圖8所示。
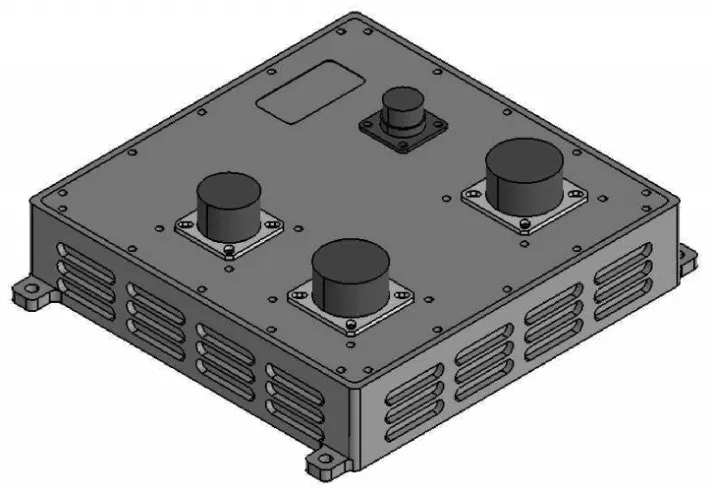
圖8 三維模型圖
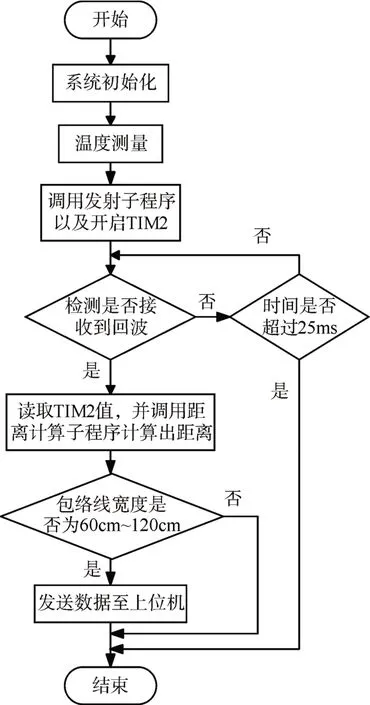
圖8 系統流程圖
首先對系統時鐘和外圍模塊等進行初始化,然后利用STM32單片機自帶溫度傳感器實時測量環境溫度,通過溫度-聲速轉換函數計算得當前溫度下聲波速度[16]。開啟高級定時器TIM2,用于計算渡越時間,并發出指令,驅動E524.09內部振蕩器工作。因為傳感器在發射聲波后會產生“掃尾”現象,即產生余振(盲區),故啟動定時器TIM3延時25ms。然后調用回波接收子程序,因接收后的回波信號最終進入單片機ADC通道,所以當ADC檢測到回波信號電壓大于某一閾值時,確定此時接收到回波信號,TIM2立即產生中斷,并讀取其計數值。之后調用距離計算子程序,可得出探頭距車輛的距離S,計算出包絡線寬度,并與閾值進行比較,最終將數據通過串口發送給上位機DSP芯片。
溫度補償:由式(1)確定聲速中為提高測量精度,使用了溫度補償,但式(1)數據類型為float型,針對于單片機會導致代碼量突然大量增大,因此選擇數據類型為int型,公式即為

程序溫度讀取公式為

6 實驗數據分析
超聲波傳感器回波信號經STM32單片機ADC模塊轉換后,通過串口發送給上位機DSP處理器,對原始包絡數據進行消噪平滑處理。超聲波包絡數據可以通過IO線讀出,最終可通過瀏覽器顯示出光滑的包絡曲線(波形圖)[17]。圖9為超聲波檢測到車輛駛入車位中的波形圖。
在路側泊車收費設備實際工作中,當車位中沒有車輛時,系統處于低功耗待機狀態,此時僅超聲波傳感器處于實時檢測狀態;當有車輛駛入時,超聲波傳感器檢測到車輛,從而喚醒設備對車輛進行計時收費。而在實際環境中,往往存在交通錐、行人等干擾物,造成超聲波誤判。交通錐處于車位中的波形圖如圖10所示。因此為增加超聲波識別車輛的準確性,設置相應算法當計算包絡線寬度達到一定閾值時,才可判定為車輛駛入。通過前期相關實驗可知:當包絡線寬度在60cm~120cm時(即車輛反射面寬度,如圖9所示車輛反射面寬度為75cm),可判定車輛駛入停車位。
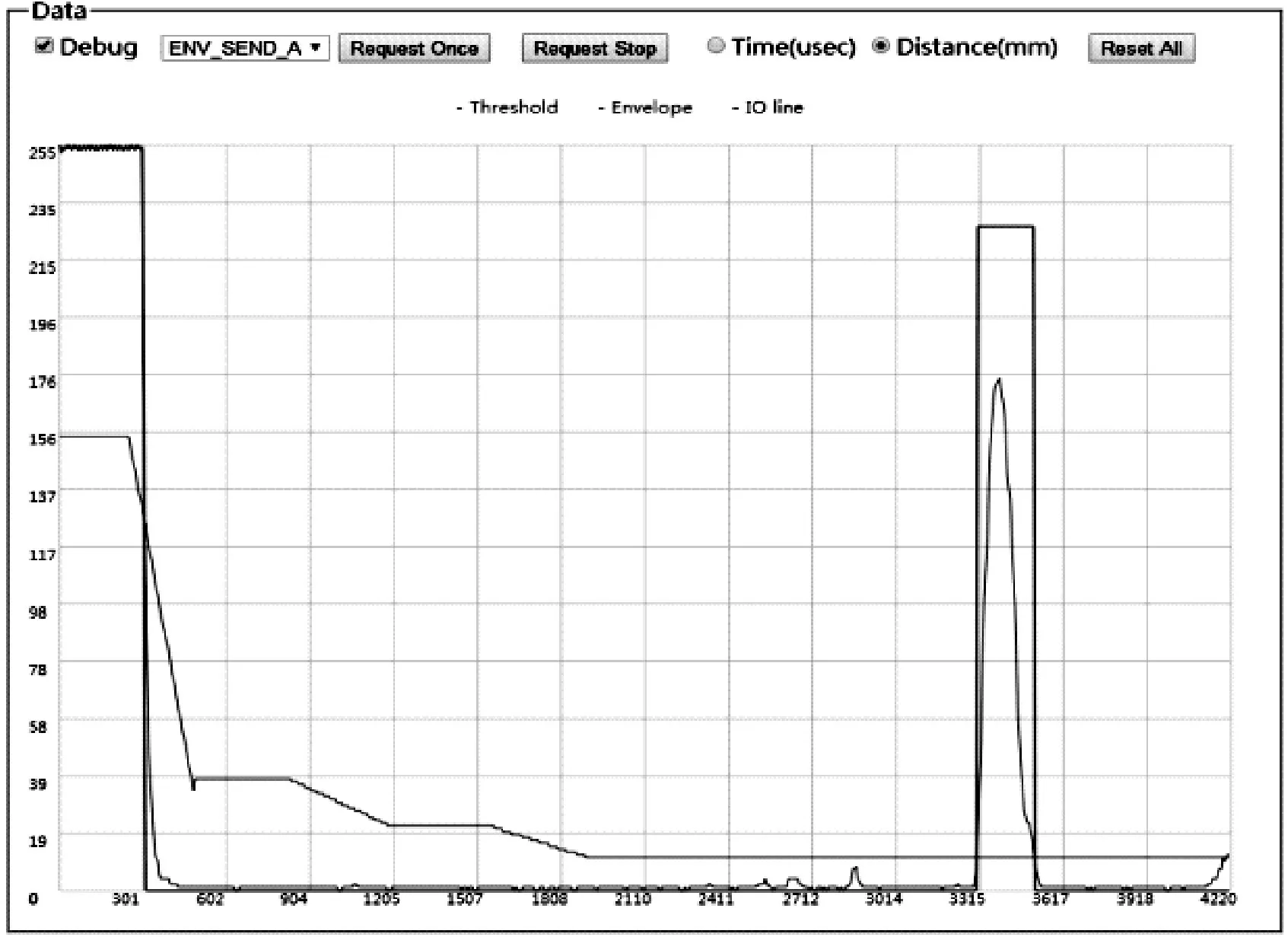
圖10 交通錐在車位中的包絡曲線圖
在實際項目中,由于公路兩側存在多種干擾,因此超聲檢測的精確性十分重要。為驗證本設計的精度,探頭與兩種障礙物在不同距離下各進行30次實驗,統計出兩種障礙物的包絡線寬度位于閾值(60cm~120cm)內的樣本數。實驗統計結果見表1。
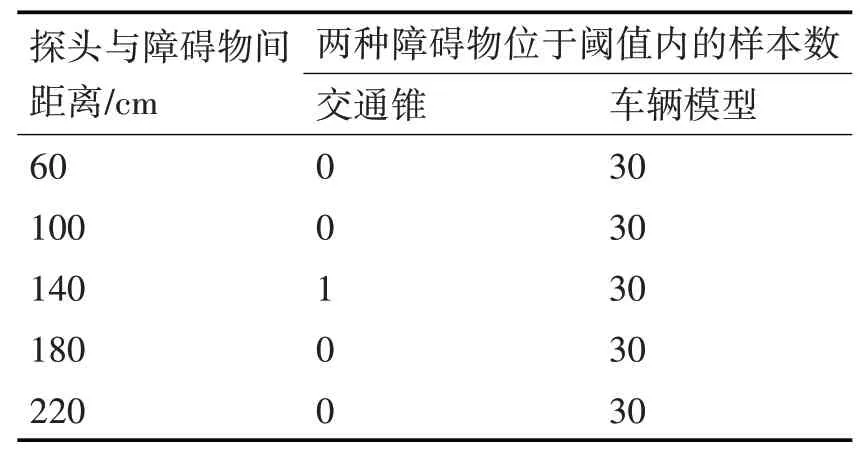
表1 不同距離及不同障礙物時的實驗結果
由表1實驗統計結果可知:當超聲波檢測交通錐時,探頭距離交通錐140cm時出現1次檢測錯誤;當超聲波檢測車輛模型時,數據均在閾值范圍內。計算可得項目探測精度達到99.7%。因此該設計精度較高,符合后續算法及系統設計要求。
7 結語
路側泊車收費設備中采用超聲檢測技術,精度以及功耗優于視頻檢測及激光檢等方案。可準確檢測出目標為車輛或其他干擾物。方案采用高速微處理器STM32單片機,充分利用其內部時鐘源,無需外接晶振;采用MCU自帶ADC模塊和溫度傳感器進行AD轉換以及溫度采集;同時利用功能強大的超聲波芯片E524.09發射脈沖信號并代替了放大濾波處理電路,極大簡化了硬件設計,有利于設備的小型化發展。通過分析探頭與交通錐、車輛模型在不同距離的包絡曲線圖,計算可得該設計精度約99.7%,精度較高且輸出數據準確,符合路側泊車收費設備檢測要求。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產業(2016年3期)2016-05-17 04:32:12
