岸基雷達比測方案設計與應用
2021-08-09 05:16:46陳靜江海力程遙
水利水電快報 2021年5期
陳靜 江海力 程遙

摘要:現有雷達比測方法的流量比測一般難以滿足代表性、一致性和可靠性要求。以武漢大學自主研發的UHF雷達為例,在仙桃站開展了與轉子式流速儀定點測速及M9 ADCP同步測流的比測工作。結果表明:雷達測速與轉子式流速儀測速位置、范圍有差異,結果存在系統偏小,需進一步驗證其相關性。與ADCP實測流量相比,雷達測速精度尚可,相關系數為0.986 3,相對誤差為-13.27%~17.09%,系統誤差為-2.10%,隨機不確定度為12.34%。與仙桃站2019年3~12月流量過程相比,雷達數據存在缺失、異常跳動值及部分時段偏差,需要進一步加強測速穩定性。
關鍵詞:UHF雷達;ADCP;流量比測;仙桃站
中圖分類號:P333 文獻標志碼:A DOI:10.15974/j.cnki.slsdkb.2021.05.009
文章編號:1006 - 0081(2021)05 - 0033 - 06
1 研究背景
社會經濟的發展對水文監測信息的時效性和可靠性需求越來越迫切[1-2]。傳統水文測流方式以接觸式測流為主,如流速儀法、浮標法和ADCP測流等,實測流量需要進行整編定線,時間較為滯后[3-5]。非接觸式雷達測流可實現在線實時監測,如果精度能滿足要求,采用連實測流量過程線法推流,將極大提高水文資料的時效性和可靠性。
進入21世紀,美國開始研發利用雷達技術的非接觸式河流流量測量方法[6],我國也于近些年開展了非接觸式雷達測流的比測研究。國內雷達比測方案主要有以下幾種:①雷達點流速與流速儀測速比測;②雷達虛流量與流速儀或ADCP實測流量、報汛流量、水位流量關系線查算流量比較分析。如吳漢[7]等在都江堰(內江)水文站進行了雷達測速儀與轉子流速儀的流速比測;李自立[8]等利用超高頻河流探測雷達的河流遙感數據提取表面流速信息,估算斷面流量,與漢口水文站整點報汛流量對比;王文華[9]用流速儀法與雷達法進行流量比測,為消除流速儀法流量測驗隨機誤差的影響,采用水位流量關系曲線查線流量值作為標準值進行誤差分析;李慶平[10]等在利川市小河溝水文站采用德國RQ24非接觸式雷達流量自動化遙測系統進行明渠流量測驗,并與聲學多普勒流速剖面儀(ADCP)流量測驗結果對比研究。
總的來說,現有的雷達測流比測方案大都比較簡單或闡述不夠清晰,尤其是岸基雷達的比測方案,表面流速比測要達到同位置、同時刻,流量比測要滿足代表性、一致性和可靠性比較困難,需要對現行比測方案做進一步總結、分析與改進。
2 基本情況
2.1 仙桃站基本情況
仙桃水文站地處湖北省仙桃市龍華山六碼頭,東經113°28′,北緯30°23′,集水面積144 684 km2,距漢江河口距離約157 km,是控制漢江下游經東荊河分流后設立的一類精度站、國家重要水文站。測驗斷面上距興隆水利樞紐111 km,上游右岸約82 km為漢江分流入東荊河口,下游右岸7 km處為杜家臺分洪閘。測驗斷面上下游有彎道控制,順直段長約1 km,河槽形態呈不規則的“W”形,右岸為深槽,左岸中低水有淺灘,中高水峰頂附近及杜家臺分洪期右岸邊有回流,河床由細沙組成,沖淤變化較大。
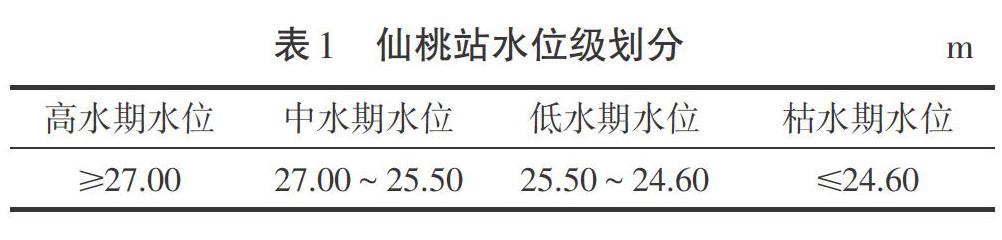
全年采用纜道流速儀法測流,按連時序法布置測次。水位流量關系受洪水漲落、變動回水、不經常性沖淤影響,長江干流高水期,該站水位流量關系受到明顯頂托影響;低水期,水位流量關系受河槽控制呈臨時單一關系。仙桃站歷史最低水位22.33 m,調查最高水位36.24 m。歷史最小流量165 m3/s,實測最大流量14 600 m3/s。水位級劃分詳見表1。
2.2 UHF雷達測流系統原理
雷達測流主要是利用多普勒效應接收回波與發射波的時間差來測定距離,利用多普勒頻率的變化測量計算目標的運動速度,并利用目標回波在各天線通道上幅度或相位的差異來判別其方向,從而得到矢量速度。
此外,UHF雷達測流還運用了Bragg散射理論[11],當雷達電磁波與其波長一半的水波作用時,同一波列不同位置的后向回波在相位上差異值為2π或2π的整數倍,因而產生增強性Bragg后向散射。通過判斷一階Bragg峰位置偏離標準Bragg峰的程度,計算波浪的徑向流速。
根據上述原理[12-14],武漢大學研制的UHF雷達測流系統雷達波長為0.88 m,頻率為340 MHz,硬件部分由發射機、接收機、發射天線和接收天線組成。在等寬的順直河道,可使用單站式系統實現流量探測;在不等寬、非順直河道或其他流場復雜河段,可使用雙站式系統實現流量探測。
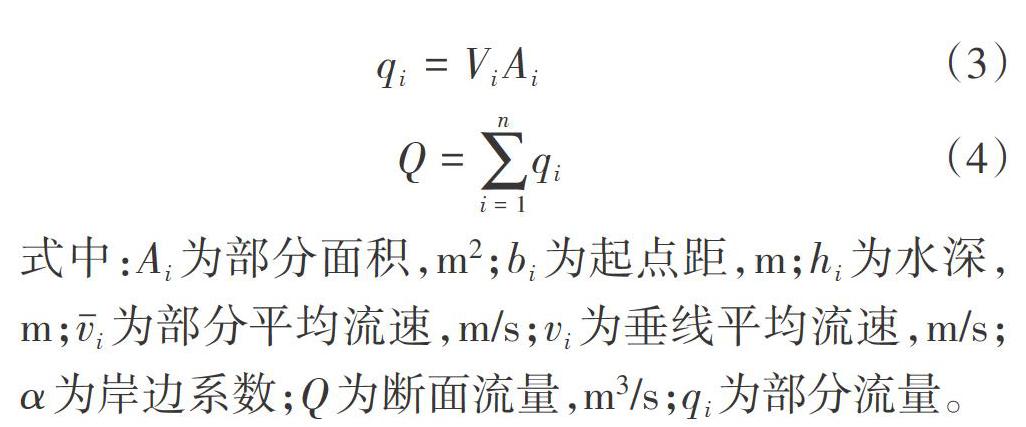
UHF雷達測流系統根據雷達回波數據生成徑向流場及矢量流場,具體過程包括一階峰區域的劃分、通道校準、方位角估計算法、徑向流場的生成及后續處理、雙站矢量流合成算法。其中,UHF雷達測流系統軟件采用流速面積法計算流量:將雷達測流生成的各垂線表面流速按照指數分布模型進行計算,得到各垂線平均流速,根據測站自記水位計查得相應水位;借用仙桃站實測大斷面,以測速垂線為界將過水斷面劃分為若干部分,計算部分面積[Ai]、部分平均流速[vi],得到部分流量[qi],累加得到斷面流量Q(見公式(1)~(4))。針對某些異常值,軟件采用中值濾波法處理:
3 比測方案設計
3.1 現有比測方法梳理
現有的比測內容主要包括點流速和斷面流量的比測。
(1)點流速比測。一般采用雷達實測的表面流速與轉子式流速儀法施測的表面流速或ADCP測流后提取的表面流速相比。其中,與轉子式流速儀法比測是比較常用的方法,然而轉子式流速儀需要完全沒入水中才能正常工作,所以測到的并非表面流速,至少是旋漿回轉半徑深位置的點流速;ADCP探頭傳感器安裝要沒入水中,ADCP后處理軟件得到的表面流速為根據實測插補外延的流速,并非真實的表面流速。嚴格來說,只有水面浮標法可以測到真實表面流速,但其流速也是上下斷面距離內水面流速的平均值,且難以把控到中斷面的位置,即浮標起點距與雷達測速位置不好對應,因此基本沒有將雷達測速與浮標法比測的案例。
(2)斷面流量比測。一般采用雷達表面流速推算的斷面流量與轉子式流速儀法測流、ADCP測流、長江水利委員會水文局報汛流量或該站水位-流量關系查算流量相比。其中,與轉子式流速儀法比測流量的方法應用相對較多,雷達為在線監測,可以設置數據采集的時間,而流速儀測流時間較長,比測時需要注意時間的同步性。根據時間-水位在水位-流量關系曲線查線流量值,由于采用整點報汛流量比測存在一定任意性,在滿足規范要求的前提下,不同技術人員的推流結果不盡相同。因此,采用時間相對較短且為實測資料的ADCP測流與雷達比測流量是一種較為可靠的方法。
3.2 比測方案設計與應用
綜合考慮現有比測方法的優缺點,本次采用UHF雷達測流系統在仙桃站開展雷達表面流速與轉子式流速儀點流速比測,雷達系統斷面流量與ADCP實測流量比測。雷達測流的誤差統計以流速儀法或ADCP法測驗成果為“真值”,統計或估算各項比測誤差。具體比測方案及開展情況如下。
3.2.1? 點流速定點比測
在高、中、低水位級下,根據波浪代表性各開展5~10次流速儀與UHF雷達測流系統表面流速的比測試驗,測點橫向分布每次不少于10個。為保證測得準確流速,轉子式流速儀在測速時需要完全入水,入水深度約0.10 m,實際測得約為0.05 m水深處的測點流速。仙桃站斷面最大水深不超過10 m,0.05 m水深位置的流速與水面流速大小大致接近。流速儀的布設位置要考慮仙桃站表面流速橫向分布的代表性,流速儀適宜的布設起點距范圍為70~320 m,間隔10 m。
各點流速儀測流歷時既要與UHF雷達測流系統的單次采樣時間同步,又要考慮消除流速脈動并體現代表性,因此每測點流速施測時間不少于100 s。同時,為確保時間的同步性及雷達的正常工作,比測時需將UHF雷達測流系統采樣頻次調整為10 min/次,每次工作100 s,比測時找到與流速儀測速時間最接近的雷達測速數據。
3.2.2 斷面流量比測
采用走航式M9 ADCP(聲學多普勒流速剖面儀)與UHF雷達測流系統比測流量。M9數據模式在中低水期采用BTM底跟蹤模式,在高水期考慮到河底走沙的影響采用GGA模式。比測測次分布在高、中、低水位級,各水位級比測測次不少于10次。比測時找到與ADCP測流平均時間最接近的雷達數據。
3.2.3 比測開展情況
UHF雷達測流系統于2019年3月8日開始收集數據,開展流速、流量比測采用的雷達測流數據時間范圍為2019年5月27日至11月15日(流速比測28次,流量比測27次,高水位10次,中、低(枯)水位各9次),水位在23.23~30.13 m之間,實測流量在476~5 770 m3/s之間。
4 應用效果
4.1 流速比測分析
表面流速比測采用UHF雷達雙站合成流速與轉子式流速儀,共施測28次,高、中、低水位級比測測次分別為10,9,9次(見表2)。
由于UHF雷達測得的表面流速對應的雷達距離(0,10,20,30 m,…)為雷達發射位置到水面的距離,與實際的斷面起點距存在一定差別,需要加上仙桃站斷面起點到雷達安裝位置的距離(27 m)。經過轉換后的雷達起點距不再為10 m的整數倍,與轉子式流速儀施測的垂線起點距(70,80,90,100,120,140,160,180,200,220,240,260,280 m和300 m)并不重合。因此,在對于表面流速進行誤差分析時,要根據本站斷面起點距對相鄰雷達起點距對應的雷達表面流速進行線性插補,得到與本站測速垂線起點距對應的雷達表面流速,再與該起點距下的流速儀表面流速進行誤差分析。
根據誤差分析(見表3),UHF雷達測速在高、中水位級都系統偏小。相對誤差絕對值基本集中在50%以內,雷達測速誤差在低水位級表現較好,誤差絕對值小于10%的比例在35.9%,高、中水位級誤差絕對值小于10%的比例僅在20.1%和26.5%,水位越高,雷達測速誤差越大。
從UHF雷達與轉子式流速儀比測流速橫向分布來看(每個水位級挑選了有代表性的3張圖,見圖1),高、中、低水位級均存在雷達測速偏小的現象。雷達在高水期起點距90~210 m位置對應的表面流速明顯偏小,起點距250 m以后差距減小;在中水期起點距70 m以后位置對應的表面流速均偏小,偏小幅度比高水期略小;低水期起點距90~210 m位置對應的表面流速明顯偏小,270 m后位置對應的表面流速偏大。
4.2 流量比測分析
雷達測流系統軟件將各垂線表面流速按照指數分布模型計算得到垂線平均流速,采用流速面積法計算斷面流量,直接將走航式M9 ADCP測流得到的斷面流量與測流平均時間對應的UHF雷達測流系統軟件計算的流量比測,測次共27次。比測結果如下:UHF雷達系統流量與ADCP實測流量相關系數為0.986 3,相對誤差在-13.27%~17.09%之間,系統誤差為-2.10%,隨機不確定度為12.34%(見圖2)。
4.3 流量過程比較分析
仙桃站常規測驗方法為纜道流速儀法,2019年按連時序法布置測次,采用連時序法和臨時曲線法定線推流,成果已通過復審并正式刊印。UHF雷達測流系統最大優勢之一在于實現了在線監測,本次系統設置于2019年3月開始運行,3月8日后獲得較為穩定的雙站數據,每整點開始記錄,測次密集,基本覆蓋了監測期間的流量變化過程。采用連實測流量過程線法進行整編推流,與仙桃站常規推流成果進行對比分析,并將2019年水位、仙桃站常規法推流流量過程線、仙桃站實測流量、UHF雷達推流流量過程線點繪于同一張圖上(節選部分典型月份見圖3)。由于UHF雷達雙站數據部分缺失,缺失單站數據的由單站(B站)數據補充,仍缺乏數據的為3月20~26日,8月15~27日,9月12~19日,在統計上述時段流量時,應根據臨近數據按照一元三點法進行插補。
通過分析推流過程線、逐日平均流量、月流量統計可以發現,UHF雷達流量過程線不夠光滑,存在較多跳動及部分異常值(已對極端異常值進行修正)。與常規法測流的流量過程線趨勢大致接近,部分時段存在偏離,特征值大小及出現時間有一些差異,相差僅1~2 d的是由于雷達數據上下波動,相差較大則是由于雷達數據存在異常跳動值。部分雙站數據缺失的用B站數據代替,而該段B站數據偏差和抖動也較為劇烈。反映到日均值上,逐日平均流量誤差小于1%的占66.91%,在1%~5%之間的占26.98%,在5%~10%之間的占4.68%,超過10%的占1.44%。
5 結論與展望
從流速比測結果可知,高、中、低水位級均存在雷達測速系統偏小的現象,尤其是在高水期起點距90~210 m位置。嚴格來說,兩種儀器施測近似在同一流線上,但并不在同一個水面點上,轉子式流速儀施測的是旋槳直徑所在水流立面的平均流速,而雷達測速所測的是水面10 m×10 m矩形方格網上的平均值,所以存在系統誤差。對于表面流速比測,需提出更為科學合理的比測思路與方法,如用浮標法、電波流速儀等與雷達測速做進一步比較。
根據流量比測結果來看,UHF雷達系統流量系統誤差為2.10%,隨機不確定度為12.34%。UHF雷達系統安裝簡單,易于維護,流量比測結果具有較高精度。鑒于仙桃站高水期河底走沙較大,可采用較為穩定可靠的ADCP(瑞智、瑞江等)GGA模式與雷達比測。
流量過程線的比較表明,雷達工作不夠穩定,尤其是A站,數據缺失導致無法生成雙站合成矢量數據,單站數據還不夠完整。與仙桃站2019年3~12月的流量過程相比,雷達數據存在缺失、異常跳動值及部分時段偏差。需要進一步提高UHF雷達測速穩定性及高水期起點距90~210 m位置的測速準確性,改進表面流量反演的計算模型精度,從而為后期投產使用提供數據支撐。
此外,需要對仙桃站游蕩型河床斷面沖於隨時間、季節、水位級、流量級和洪水過程變化引起的流量誤差分布繼續分析,累積資料樣本,給出UHF雷達系統測流在該站的適用條件。
參考文獻:
[1] 香天元,熊珊珊. 論水文監測信息生產現代化體系的構建[J]. 人民長江, 2015,46(3):65-69.
[2] 趙昕,梅軍亞,李厚永,等. 水文監測創新在2016年長江洪水測報中的作用[J]. 人民長江, 2017,48(4):8-12.
[3] 王俊. 長江水文測驗方式方法技術創新的探索與實踐[J]. 水文, 2011,31(增1):1-3.
[4] 熊瑩,王俊. 長江水文測驗體系創新實踐與方向性問題探討[J]. 華北水利水電大學學報(自然科學版), 2017,38(2):11-15.
[5] 香天元,梅軍亞. 效率優先:近期水文監測技術發展方向探討[J]. 人民長江, 2018,49(5):26-30.
[6] 陸偉佳,時霞. 淺談雷達測流技術在美國的發展[J]. 水利水文自動化, 2006,(4):43-45.
[7] 吳漢,宋麗瓊. 雷達測速儀水文測驗的應用研究[J]. 中國水利,2014(7):58-59.
[8] 李自立,王才軍,李永輝. 基于超高頻雷達的流量測量算法研究:以長江武漢段為例[J]. 武漢大學學報(理學版),2013,59(3):242-244.
[9] 王文華. 雷達測流儀比測分析[J]. 人民黃河, 2016,38(5):6-9.
[10] 李慶平,秦文安,毛啟紅. 非接觸式流量在線監測技術在山區性河流的應用研究[J]. 湖北民族學院學報,2013,31(3):354-356.
[11] 李柯. 基于全數字超高頻雷達海浪Bragg與非Bragg散射機理研究[D]. 武漢:武漢大學,2015.
[12] Barrick D E. FM/CW radar signal and digital processing [R].? Washington:NOAA Technical Report ERL 183-WPL 26, 1973.
[13] Crombie D D. Doppler spectrum of sea echo at 13.56 Mc. /s. [J]. Nature, 1955,175(4459):681-682.
[14] Lipa B , Barrick D E. Least-squares methods for the extraction of surface currents from CODAR crossed-loop data: Application at ARSOLE [J]. IEEE Journal of Oceanic Engineering, 1983,8(4):226 -253.
(編輯:李 慧)
Abstract: The existing radar discharge measurement method can not meet the requirement of representativeness, consistency and reliability. Taking the self-developed UHF radar of Wuhan University as an example, the comparison measurement of radar discharge measurement with rotating-element current meter and M9 ADCP were carried out at Xiantao Hydrometric Station on the Hanjiang River. The results showed that there were differences in the velocity measurement location and range between radar and rotating-element current meter, and the result of radar was systematically smaller, so the correlation should be further verified. Compared with the ADCP measured discharge, the accuracy of radar discharge measurement was good, the correlation coefficient was 0.9863, the relative error was from -13.27% to 17.09%, the systematic error was -2.10%, and the random uncertainty was 12.34%. In the view of the discharge process of Xiantao Hydrometric Station from March to December 2019, the disadvantages of radar included data missing, abnormal runout value and deviation in some time periods, so the stability of velocity measurement of the system should be strengthened in the future.
Key words: UHF radar; ADCP; discharge measurement comparison; Xiantao Hydrometric Station