機(jī)械振源數(shù)估計(jì)的四線性平行因子方法研究
2021-08-09 08:26:10李志農(nóng)朱亞靜王冬
振動(dòng)工程學(xué)報(bào) 2021年3期
關(guān)鍵詞:故障診斷
李志農(nóng) 朱亞靜 王冬
摘要: 針對(duì)三線性平行因子模型在機(jī)械振源數(shù)盲估計(jì)方法中存在的不足,即由于維度的限制只能對(duì)振動(dòng)信號(hào)的部分信息建模,信號(hào)中的時(shí)間序列信息被忽略。將三線性平行因子的機(jī)械振源數(shù)估計(jì)方法擴(kuò)展至四維,提出一種基于四線性平行因子的機(jī)械振源數(shù)估計(jì)方法。所提出的方法中,在三維的基礎(chǔ)上增加了第四個(gè)維度(時(shí)間維),利用四線性交替最小二乘法迭代更新載荷矩陣,用核一致診斷法估計(jì)振源數(shù)。提出的方法既繼承了三線性平行因子的獨(dú)特優(yōu)勢(shì),同時(shí),又包含了更完整的振動(dòng)信號(hào)的信息。相比三線性平行因子機(jī)械振源數(shù)估計(jì)方法,同組分?jǐn)?shù)條件下四線性平行因子比三線性平行因子得到的核一致值更高,估計(jì)更加準(zhǔn)確。仿真結(jié)果表明,提出的方法優(yōu)于三線性平行因子機(jī)械振源數(shù)估計(jì)方法。實(shí)驗(yàn)結(jié)果進(jìn)一步驗(yàn)證了提出的方法的有效性。
關(guān)鍵詞: 故障診斷; 四線性平行因子; 盲源分離; 機(jī)械振源數(shù)估計(jì); 四線性交替最小二乘
中圖分類號(hào): TH165+.3; TN911.7? ? 文獻(xiàn)標(biāo)志碼: A? ? 文章編號(hào): 1004-4523(2021)03-0619-07
DOI:10.16385/j.cnki.issn.1004-4523.2021.03.020
引? 言
傳統(tǒng)的機(jī)械故障源盲分離往往假設(shè)信號(hào)源數(shù)是已知的,例如,文獻(xiàn)[1]提出的旋轉(zhuǎn)機(jī)械監(jiān)測(cè)預(yù)處理盲分離方法和文獻(xiàn)[2]提出的用于殼體結(jié)構(gòu)振源數(shù)目估計(jì)的獨(dú)立分量分析方法,這些方法都是在信號(hào)源數(shù)已知的條件下進(jìn)行盲分離。然而,在實(shí)際工程中,機(jī)械故障源數(shù)往往是未知的,為此,需要探討關(guān)于源數(shù)未知條件下的機(jī)械故障盲分離方法。目前,基于源數(shù)估計(jì)的機(jī)械故障源盲分離方法取得了一些進(jìn)展[3?6],例如,文獻(xiàn)[3]結(jié)合分?jǐn)?shù)傅里葉變換和盲分離理論的思想提出了一種機(jī)械故障源分離方法。文獻(xiàn)[4]基于小波包分析思想提出了一種機(jī)械振動(dòng)源數(shù)估計(jì)方法。然而,這些機(jī)械故障源數(shù)盲估計(jì)算法都屬于二維數(shù)據(jù)處理方法,采用矩陣分解,并附加了一些約束條件。一般來(lái)說(shuō),矩陣分解不是唯一的,除非施加約束性條件,如正交性、Toeplitz和恒模特性等。但實(shí)際應(yīng)用中并不能滿足這些苛刻的約束條件,所以需要尋求新的方法解決這一問(wèn)題。
近年來(lái),平行因子模型(PARAFAC)[7?8]因具有分解唯一性的優(yōu)勢(shì)備受關(guān)注,它起源于平行比例分布原則,因其優(yōu)勢(shì),平行因子理論在許多領(lǐng)域得到快速發(fā)展,例如化學(xué)分析領(lǐng)域[9]、無(wú)線通信領(lǐng)域[10]、環(huán)境化學(xué)計(jì)量領(lǐng)域[11]、故障診斷領(lǐng)域[12]。特別在信號(hào)處理和故障診斷領(lǐng)域內(nèi)平行因子模型現(xiàn)已成為一種新型的、有力的研究手段。例如文獻(xiàn)[13]將平行因子理論應(yīng)用到陣列多參數(shù)的聯(lián)合估計(jì)中。文獻(xiàn)[14]將三維平行因子應(yīng)用到機(jī)械振源數(shù)估計(jì)之中,該方法可有效估計(jì)機(jī)械振源數(shù)目。但是實(shí)際的應(yīng)用中,使用現(xiàn)有的三維平行因子進(jìn)行機(jī)械振源數(shù)估計(jì)時(shí),只能對(duì)采集信號(hào)的傳感器數(shù)目、振動(dòng)信號(hào)的分段數(shù)以及每個(gè)數(shù)據(jù)段包含的數(shù)據(jù)點(diǎn)數(shù)信息進(jìn)行建模,振動(dòng)信號(hào)中的時(shí)間序列信息被完全忽略,振動(dòng)信號(hào)包含的信息不完整,所以有必要將三維平行因子機(jī)械振源數(shù)估計(jì)方法擴(kuò)展至四維。目前,平行因子三維至四維的擴(kuò)展取得初步的進(jìn)展[15?17]。例如,文獻(xiàn)[15]提出一種基于四線性平行因子的雷達(dá)角度和頻率聯(lián)合估計(jì)算法。文獻(xiàn)[16]提出一種應(yīng)用于環(huán)境分析的交變加權(quán)剩余約束四次線性分解模型。這些文獻(xiàn)都表明四線性平行因子分解不僅保持了三線性分解唯一性的優(yōu)點(diǎn),而且數(shù)據(jù)收斂更加平穩(wěn),所含的信息更加全面,更不容易陷入局部最優(yōu)化。但是在機(jī)械振源數(shù)估計(jì)方面三維平行因子到四維平行因子的擴(kuò)展還是空白的。
為此,針對(duì)現(xiàn)有的三線性平行因子在故障盲分離中存在的不足,本文將三維平行因子擴(kuò)展至四維即引入(時(shí)間維)解決振動(dòng)信號(hào)時(shí)序信息被忽略的問(wèn)題,提出了一種基于四線性平行因子的機(jī)械振源數(shù)估計(jì)方法。它是在三維的基礎(chǔ)上引入第四維(時(shí)間維)并將四線性平行因子盲分離方法和核一致檢測(cè)相結(jié)合,利用四線性交替最小二乘進(jìn)行更新擬合,并且得出了最佳組分?jǐn)?shù)下的載荷矩陣,能夠有效地估計(jì)振源數(shù)目。
1 四線性平行因子模型
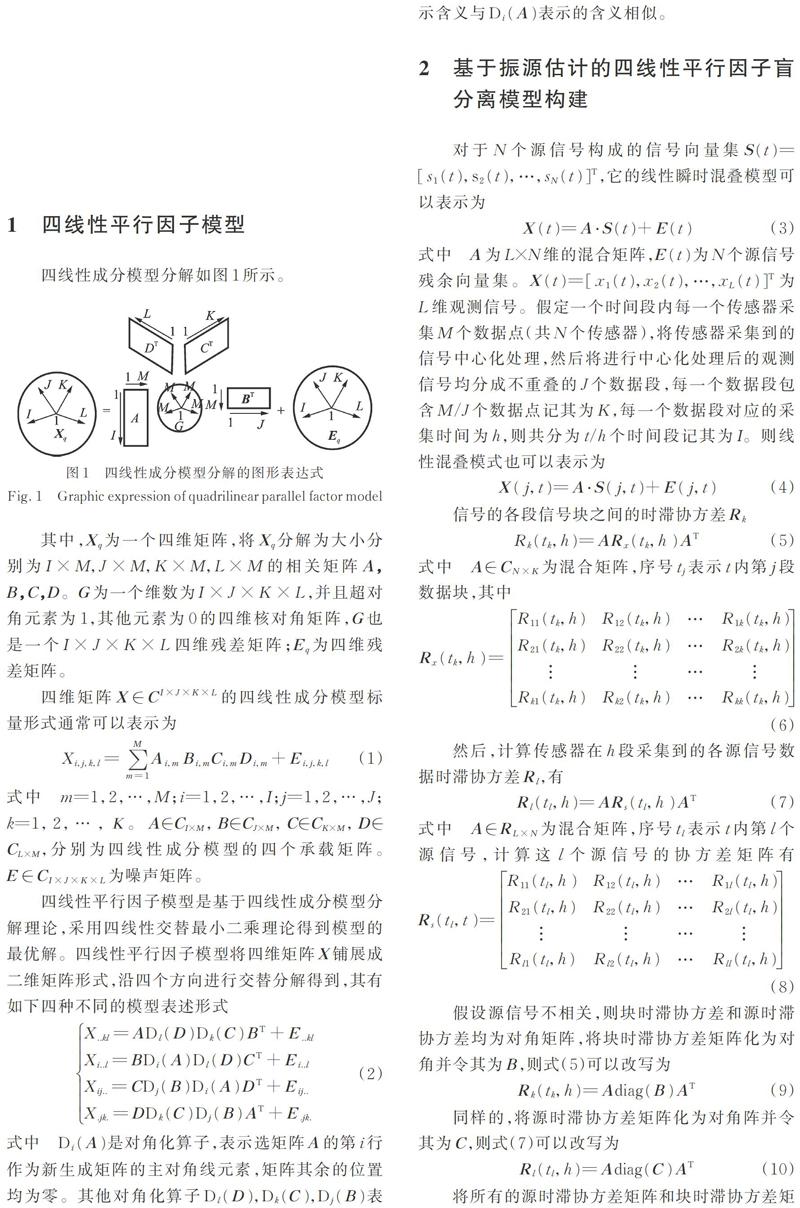
四線性成分模型分解如圖1所示。
其中,Xq為一個(gè)四維矩陣,將Xq分解為大小分別為的相關(guān)矩陣A,B,C,D。G為一個(gè)維數(shù)為,并且超對(duì)角元素為1,其他元素為0的四維核對(duì)角矩陣,G也是一個(gè)四維殘差矩陣;Eq為四維殘差矩陣。
四維矩陣的四線性成分模型標(biāo)量形式通常可以表示為
四線性平行因子模型是基于四線性成分模型分解理論,采用四線性交替最小二乘理論得到模型的最優(yōu)解。四線性平行因子模型將四維矩陣X鋪展成二維矩陣形式,沿四個(gè)方向進(jìn)行交替分解得到,其有如下四種不同的模型表述形式
式中 是對(duì)角化算子,表示選矩陣A的第i行作為新生成矩陣的主對(duì)角線元素,矩陣其余的位置均為零。其他對(duì)角化算子,,表示含義與表示的含義相似。
2 基于振源估計(jì)的四線性平行因子盲分離模型構(gòu)建
對(duì)于N個(gè)源信號(hào)構(gòu)成的信號(hào)向量集,它的線性瞬時(shí)混疊模型可以表示為
式中 A為L(zhǎng)×N維的混合矩陣,為N個(gè)源信號(hào)殘余向量集。為L(zhǎng)維觀測(cè)信號(hào)。假定一個(gè)時(shí)間段內(nèi)每一個(gè)傳感器采集M個(gè)數(shù)據(jù)點(diǎn)(共N個(gè)傳感器),將傳感器采集到的信號(hào)中心化處理,然后將進(jìn)行中心化處理后的觀測(cè)信號(hào)均分成不重疊的J個(gè)數(shù)據(jù)段,每一個(gè)數(shù)據(jù)段包含M/J個(gè)數(shù)據(jù)點(diǎn)記其為K,每一個(gè)數(shù)據(jù)段對(duì)應(yīng)的采集時(shí)間為h,則共分為t/h個(gè)時(shí)間段記其為I。則線性混疊模式也可以表示為
3 振源數(shù)的估計(jì)
四維數(shù)據(jù)用四線性平行因子分析方法計(jì)算其最佳組分?jǐn)?shù)時(shí),用核一致診斷算法(CORCONDIA)[18]來(lái)預(yù)先估計(jì)正確的成分?jǐn)?shù)來(lái)確定機(jī)械振動(dòng)信號(hào)的振源數(shù)。核一致診斷法通過(guò)計(jì)算核一致值(core?consistency)來(lái)確定體系的成分?jǐn)?shù),其計(jì)算公式如下
式中 是模型的組分?jǐn)?shù);式(14)反映了不同組分?jǐn)?shù)時(shí)理想情況下的核心陣與最小二乘擬合陣的擬合程度。為擬合陣G的元素;是超對(duì)角陣T的元素。T為平行因子模型中的超對(duì)角陣,它是在理想情況下取正確組分?jǐn)?shù)時(shí)用Tucker3[19]方法得到的核心陣;G為用Tucker3方法得到的最小二乘擬合陣。一般認(rèn)為核一致值為80%到100%模型有效,40%到80%之間的值表示模型可能有效,但有輕微的特異性或相關(guān)性,而低于40%的值意味著模型無(wú)效。
4 仿真研究
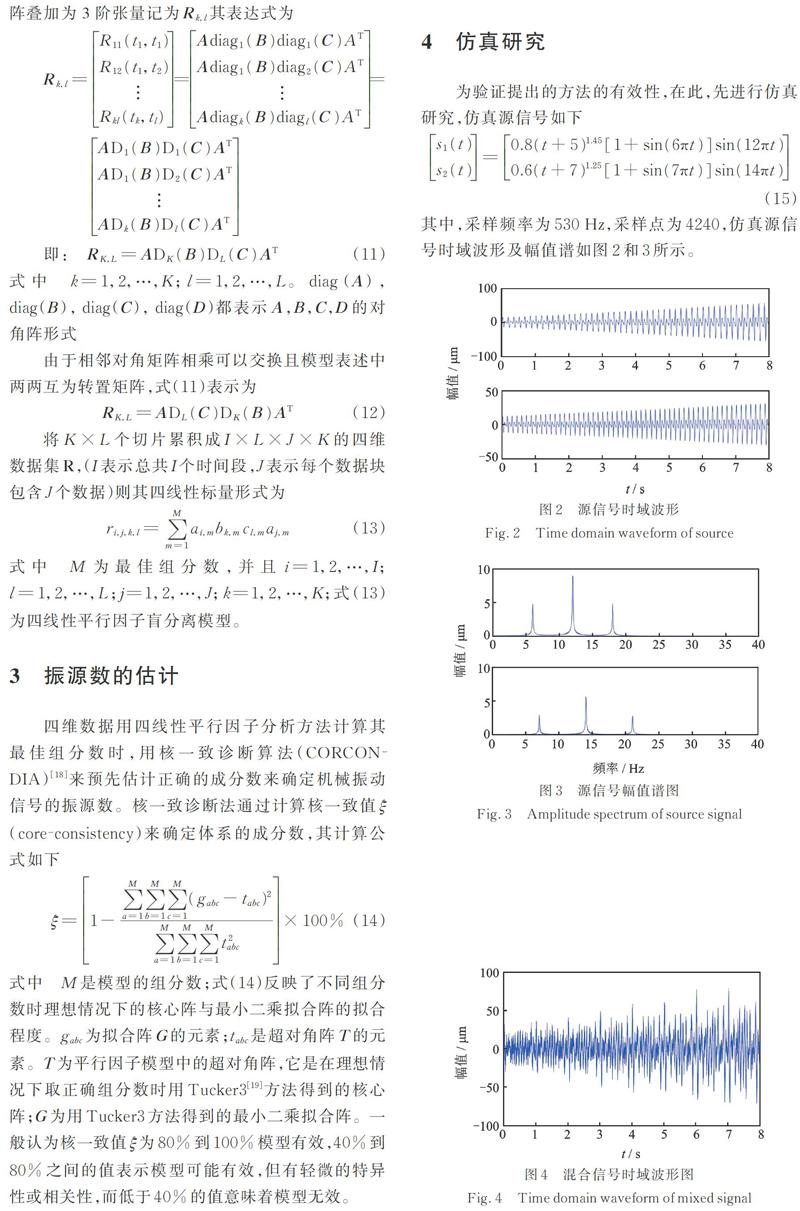
為驗(yàn)證提出的方法的有效性,在此,先進(jìn)行仿真研究,仿真源信號(hào)如下
其中,采樣頻率為530 Hz,采樣點(diǎn)為4240,仿真源信號(hào)時(shí)域波形及幅值譜如圖2和3所示。
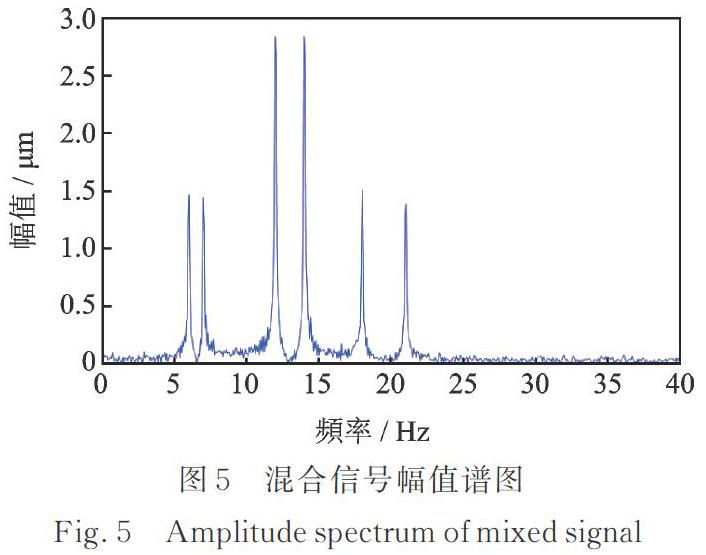
設(shè)置混合矩陣A為[0 1]區(qū)間的隨機(jī)數(shù),根據(jù)線性瞬時(shí)混疊模型得到虛擬觀測(cè)信號(hào)。混疊后的虛擬觀測(cè)信號(hào)的時(shí)域波形圖和幅值譜圖分別如圖4和5所示。由圖4和5可知,在混合信號(hào)時(shí)域波形圖中無(wú)法辨識(shí)源信號(hào)特征頻率,兩個(gè)仿真信號(hào)的特征頻率完全混疊在一起。
通過(guò)核一致檢測(cè)算法估計(jì)最佳組分?jǐn)?shù)(即振源數(shù)),使用四線性最小二乘法進(jìn)行迭代,計(jì)算其核一致值、殘差平方和與迭代次數(shù),若核一致值大于80%,且殘差平方和低于1000和迭代次數(shù)低于30000,算法有效(一般而言,殘差平方和為每一次迭代殘差平方的累加,當(dāng)殘差低于10-6并且不再減少時(shí)迭代結(jié)束)。
由圖6可知,當(dāng)組分?jǐn)?shù)為2時(shí),核一致值為100%,當(dāng)組分?jǐn)?shù)為3時(shí),核一致值為0。核一致值在2時(shí)滿足核一致檢測(cè)的條件并且在之后發(fā)生突變,當(dāng)組分?jǐn)?shù)為2時(shí),迭代次數(shù)低于30000,殘差平方和小并且滿足限制條件,說(shuō)明最佳組分?jǐn)?shù)值為2即振源數(shù)為2,算法有效。在組分?jǐn)?shù)值為2時(shí)得到的4個(gè)分解載荷如圖7所示,載荷矩陣B,D分解形式相同,符合式(12)中四線性平行因子盲分離模型。
為了體現(xiàn)本文方法的優(yōu)越性,在此給出了三線性平行因子源數(shù)估計(jì)方法的結(jié)果,如圖8所示。當(dāng)組分?jǐn)?shù)為2時(shí),核一致值為65%,當(dāng)組分?jǐn)?shù)為3時(shí),核一致值為0,即振源數(shù)為2。雖然核一致值為2時(shí)滿足核一致檢測(cè)的條件,但是其核一致值低于80%,表明模型可能有效,即不能夠非常準(zhǔn)確估計(jì)振源數(shù)目。而本文提出的方法在組分?jǐn)?shù)為2時(shí),核一致值為100%,組分?jǐn)?shù)為3時(shí),核一致值為0,表明模型有效,且能夠非常準(zhǔn)確地估計(jì)振源數(shù)目,而不是“可能”。這是因?yàn)樗木S平行因子振源數(shù)估計(jì)方法增加了振動(dòng)信號(hào)中的時(shí)間序列信息,包含信息更全面,得到的源數(shù)估計(jì)值也更加可靠。對(duì)比三線性平行因子同組分?jǐn)?shù)下的迭代次數(shù),四線性迭代次數(shù)更少。對(duì)比同組分?jǐn)?shù)下殘差平方和,如表1所示,四線性平行因子的的殘差平方和更小,相比于三線性平行因子,收斂更加平穩(wěn)。
5 實(shí)驗(yàn)研究
為了進(jìn)一步驗(yàn)證四線性平行因子機(jī)械振源數(shù)估計(jì)方法的有效性,在此,將提出的方法應(yīng)用到機(jī)械設(shè)備滾動(dòng)軸承故障源數(shù)估計(jì)中。實(shí)驗(yàn)設(shè)備由一個(gè)小電機(jī),傳感器,時(shí)間計(jì)數(shù)器,功率計(jì)等設(shè)備構(gòu)成。電機(jī)負(fù)載為0,電機(jī)轉(zhuǎn)速約1797 r/min,相應(yīng)的轉(zhuǎn)頻為fr=29.17 Hz,采樣頻率為48000 Hz,用電火花加工技術(shù),分別在軸承內(nèi)圈和軸承外圈設(shè)置兩個(gè)故障。在驅(qū)動(dòng)端,軸承內(nèi)圈設(shè)置0.1778 mm的點(diǎn)蝕故障,軸承外圈設(shè)置0.5334 mm的點(diǎn)蝕故障。加速度傳感器安放在電機(jī)殼體上,用兩個(gè)加速度傳感器采集信號(hào),采樣點(diǎn)數(shù)為10240,獲得2通道觀測(cè)信號(hào),采集到的觀測(cè)信號(hào)時(shí)域波形如圖9所示。
首先,將采集到的數(shù)據(jù)進(jìn)行中心化處理,并將處理后的觀測(cè)信號(hào)分成不重疊的16段數(shù)據(jù)塊,相對(duì)應(yīng)的時(shí)間段為16,每一個(gè)數(shù)據(jù)段包含256個(gè)數(shù)據(jù)點(diǎn)。其次,將各段信號(hào)塊之間的時(shí)滯協(xié)方差疊加成3階并計(jì)算其時(shí)滯協(xié)方差矩陣,然后將這個(gè)3階張量在時(shí)間段上疊加為4階,用核一致診斷算法估計(jì)最佳組分?jǐn)?shù)(振源數(shù)),用四線性最小二乘法進(jìn)行迭代,計(jì)算其殘差平方和與迭代次數(shù),得到的結(jié)果如圖10所示。
由圖10可知,當(dāng)組分?jǐn)?shù)為2時(shí),迭代次數(shù)在合理的范圍,殘差平方和滿足限制條件并且核一致值遠(yuǎn)大于80%,當(dāng)組分?jǐn)?shù)等于3時(shí)核一致值接近0。核一致值在組分?jǐn)?shù)等于2時(shí)滿足核一致檢測(cè)的條件并且在組分?jǐn)?shù)等于3時(shí)發(fā)生突變,所以最佳組分?jǐn)?shù)為2,即振源為2。
6 結(jié)? 論
針對(duì)三線性平行因子只能對(duì)振動(dòng)信號(hào)的部分信息建模,信號(hào)中的時(shí)間序列信息被完全忽略的缺陷,本文提出一種基于四線性平行因子的機(jī)械振源數(shù)估計(jì)方法。該方法將三線性平行因子擴(kuò)展到四線性,增加了振動(dòng)信號(hào)時(shí)間序列信息,彌補(bǔ)了三線性建模時(shí)只能對(duì)部分信息建模的缺陷,使數(shù)據(jù)包含的信息更完整。用四線性交替最小二乘法擬合迭代,同組分?jǐn)?shù)下四線性得到的殘差平方和比三線性的更小,表明四線性平行因子相比于三線性收斂更加平穩(wěn)。用核一致診斷算法得到該模型下的最佳組分?jǐn)?shù)(振源數(shù)目),同組分?jǐn)?shù)條件下四線性比三線性得到的核一致值更高,更符合核一致估計(jì)條件。相比于三線性得到的可能有效的估計(jì)結(jié)果,四線性平行因子的估計(jì)更加準(zhǔn)確。最后利用仿真和實(shí)驗(yàn)驗(yàn)證了提出的方法的有效性。
參考文獻(xiàn):
[1] Gelle G, Colas M, Servière C. Blind source separation: A new pre-processing tool for rotating machines monitoring?[J]. IEEE Transactions on Instrumentation and Measurement, 2003, 52(3): 790-795.
[2] 成? 瑋,何正嘉,張周鎖. 基于獨(dú)立分量分析的殼體結(jié)構(gòu)振源數(shù)目估計(jì)方法[J]. 機(jī)械工程學(xué)報(bào), 2014,50(19): 73-79.
Cheng Wei, He Zhengjia, Zhang Zhousuo. Estimation method of vibration source number of shell structure based on independent component analysis[J]. Journal of Mechanical Engineering, 2014, 50(19): 73-79.
[3] 李志農(nóng), 呂亞平, 岳秀廷. 基于分?jǐn)?shù)Fourier變換的機(jī)械故障源盲分離方法的研究[J]. 軸承, 2010,(6): 47-50.
Li Zhinong,Lü Yaping, Yue Xiuting. Research on blind separation of mechanical fault sources based on fractional Fourier transform [J]. Bearing,2010,(6): 47-50.
[4] 毋文峰, 陳小虎, 蘇勛家, 等. 機(jī)械振動(dòng)源數(shù)估計(jì)的小波方法[J]. 機(jī)械科學(xué)與技術(shù), 2011, 30(10): 1679-1682.
Wu Wenfeng, Chen Xiaohu, Su Xunjia, et al. Wavelet method for estimating mechanical vibration sources[J]. Mechanical Science and Technology, 2011, 30(10): 1679-1682.
[5] 張洪淵,賈? 鵬,史習(xí)智,等. 確定盲分離中未知信號(hào)源個(gè)數(shù)的奇異值分解法[J]. 上海交通大學(xué)學(xué)報(bào),2001, 35(8): 1155-1158.
Zhang Hongyuan, Jia Peng, Shi Xizhi, et al. Singular value decomposition method for determining the number of unknown signal sources in blind separation[J]. Journal of Shanghai Jiao Tong University, 2001, 35(8): 1155-1158.
[6] LEl Huang, TEND Long, WU Shunjun. Source enumeration for high-resolution array processing using improved Gerschgorin radii without eigcn dccomposition[J]. IEEE Transactions on Signal Processing, 2008,56(12): 5916-5925.
[7] Harshman R A. Determination and Proof of Minimum Uniqueness Conditions for PARAFAC[J]. UCLA Working Papers in Phonetics, 1972, 22(1): 111-117.
[8] Carroll J D, Chang J J. Analysis of individual differences in multimensional scaling via an N-way generalization of “Eckart-Young” decomposition[J]. Psychometrika, 1970, 35(3): 283-319.
[9] Lee B M, Seo Y S, Hur J. Investigation of adsorptive fractionation of humic acid on graphene oxide using fluorescence EEM-PARAFAC[J].Water Research,2015, 73: 242-251.
[10] Zhang Xiaofei, Cao Renzheng, Zhou Ming. Noncircular-PARAFAC for 2D-DOA estimation of noncircular signals in arbitrarily spaced acoustic vector-sensor array subjected to unknown locations[J]. EURASIP Journal on Advances in Signal Processing, 2013: 107
[11] 張卉楓. 三維化學(xué)計(jì)量學(xué)方法應(yīng)用于環(huán)境檢測(cè)和藥物分析[D]. 長(zhǎng)沙:湖南大學(xué), 2007.
Zhang Huifeng. Application of three-dimensional chemometrics in environmental detection and drug analysis [D]. Changsha: Hunan University, 2007.
[12] 楊? 誠(chéng). 平行因子分析在多故障源盲分離中的應(yīng)用研究[D]. 南昌:南昌航空大學(xué), 2018.
Yang Cheng. Application of parallel factor analysis in blind separation of multiple fault sources[D]. Nanchang: Nanchang Hangkong University, 2018.
[13] 許凌云. 陣列多參數(shù)聯(lián)合估計(jì)算法及應(yīng)用的研究[D]. 南京:南京航空航天大學(xué),2012.
Xu Lingyun. Research on the algorithm and application of array multi-parameter joint estimation [D]. Nanjing:Nanjing University of Aeronautics and Astronautics, 2012.
[14] 楊? 誠(chéng), 李志農(nóng). 采用PARAFAC的欠定盲分離中機(jī)械振源數(shù)估計(jì)方法[J].華僑大學(xué)學(xué)報(bào)(自然科學(xué)版), 2018, 39(3): 337-342.
Yang Cheng, Li Zhinong. Using PARAFAC's method for estimating the number of mechanical vibration sources in underdetermined blind separation[J]. Journal of Overseas Chinese University (Natural Science Edition), 2018, 39(3): 337-342.
[15] 李建峰, 張小飛. 基于四線性分解的雙基地MIMO雷達(dá)的角度和多普勒頻率聯(lián)合估計(jì)[J]. 航空學(xué)報(bào), 2012, 33(8): 1474-1482.
Li Jianfeng, Zhang Xiaofei. Joint angle and Doppler frequency estimation of bistatic MIMO radar based on quadrilinear decomposition[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(8): 1474-1482.
[16] Liu Tingting, Zhang Ling, Wang Shutao, et al. Four-dimensional data coupled to alternating weighted residue constraint quadrilinear decomposition model applied to environmental analysis: Determination of polycyclic aromatic hydrocarbons[J]. Spectrochimica Acta Part A, Molecular and Biomolecular Spectroscopy, 2018,193: 507-517.
[17] Wang Z, Cai C, Wen F, et al. A quadrilinear decomposition method for direction estimation in bistatic MIMO radar[J]. IEEE Access, 2018, 6: 13766-13772.
[18] Bro R, Kiers H A. A new efficient method for determining the number of components in PARAFAC models[J]. Journal of Chemometrics, 2003, 17(5): 274-286.
[19] Tucker L. Some mathematical notes on three-mode factor analysis[J]. Psychometrika, 1966, 31: 279-311.
作者簡(jiǎn)介: 李志農(nóng)(1966-),男,教授。E-mail:lizhinong@tsinghua.org.cn
猜你喜歡
一重技術(shù)(2021年5期)2022-01-18 05:42:10
水泵技術(shù)(2021年3期)2021-08-14 02:09:20
裝備制造技術(shù)(2020年3期)2020-12-25 05:22:30
制造技術(shù)與機(jī)床(2018年11期)2018-11-23 01:07:42
電子制作(2018年10期)2018-08-04 03:24:46
制造技術(shù)與機(jī)床(2017年10期)2017-11-28 05:20:43
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
振動(dòng)工程學(xué)報(bào)(2014年2期)2014-03-01 01:15:22
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
振動(dòng)、測(cè)試與診斷(2014年4期)2014-03-01 01:14:00

- 振動(dòng)工程學(xué)報(bào)的其它文章
- 形態(tài)經(jīng)驗(yàn)小波變換和改進(jìn)分形網(wǎng)絡(luò)在軸承故障識(shí)別中的應(yīng)用
- 結(jié)合DSHDD和模糊評(píng)價(jià)的滾動(dòng)軸承退化狀態(tài)在線識(shí)別
- 利用參數(shù)自適應(yīng)多點(diǎn)最優(yōu)最小熵反褶積的行星輪軸承微弱故障特征提取
- 遺傳規(guī)劃提取優(yōu)化特征在軸承壽命預(yù)測(cè)中的應(yīng)用
- 基礎(chǔ)激勵(lì)下帶金屬外層的多黏彈性層纖維增強(qiáng)層合板的動(dòng)力學(xué)模型
- 改進(jìn)傅里葉級(jí)數(shù)法求解封口錐柱球組合殼的自由振動(dòng)