基于多目標優化算法的交叉路口信號燈配時模型研究
2021-08-09 11:27:53郝林倩
智能計算機與應用 2021年3期
郝林倩
摘 要: 當前國內道路交通管制仍然主要依靠交通信號燈,依然是傳統的三色燈固定配時模式,這種模式最大的弊端在于不能針對交通流的實時變化進行動態配時調整,從而造成道路資源的浪費。對多目標算法進行優化,并提出一種交叉路口信號燈智能配時模型。又利用實際數據對模型進行了測試分析。實驗證明,該模型能有效減少機動車的平均延遲時間和停車次數,從而提升道路的通行效率。
關鍵詞: 交叉口; 交通流預測; 動態配時; 多目標優化算法
文章編號: 2095-2163(2021)03-0154-05 中圖分類號:TP391 文獻標志碼:A
【Abstract】At present, road traffic control in China still mainly relies on traffic signal lights, which is still the traditional three-color light fixed timing mode. The biggest drawback of this mode is that it cannot adjust the dynamic timing according to the real-time changes of traffic flow, resulting in waste of road resources. Based on the optimization of multi-objective algorithm, a dynamic timing model of intersection signal is proposed. And the model is tested and analyzed by using the actual data. The results show that the model can not only effectively reduce the average delay time and parking times, but also improve the maximum flow capacity of the road.
【Key words】 intersection; traffic flow prediction; dynamic timing; multi-objective optimization algorithm
0 引 言
當前,堵車現象已成為城市道路交通中令人困擾的問題之一,究其成因,既有生活水平提高帶來的家庭用車數量增加和城市道路交通容量跡近飽和的緣故,但也有交通管制與引導不科學所致。國內的道路交通管制目前主要依靠交通信號燈的控制,仍然是傳統的三色燈固定配時模式,這種模式的弊端就在于不能針對交通流的實時變化進行動態配時調整,從而造成道路資源的浪費。本文在對多目標算法進行優化的基礎上,提出了一種交叉路口信號燈動態配時模型。并利用實際數據對模型進行了測試分析。實驗證明,該模型能有效減少機動車的平均延遲時間和停車次數,從而提升道路的通行效率。
1 多目標優化理論
1.1 多目標優化的數學描述
現實中,很多事務都存在有多個指標需要同時滿足的情況,即同一問題模型中存在多個非線性目標,這些目標函數都需要優化,但函數之間往往相互沖突。類似這樣的問題,又稱為多目標優化問題[1](Muti-Objective Optimization Problem,MOP),其數學描述如下。
設有M個目標函數,n維決策變量和K種約束條件組成,最優化目標如下:
1.2 多目標算法的優化
在多目標優化問題中,每個指標必須各有權重,不可能都同時達到最優。其中,某些指標是相互依存的,而另一些則是矛盾的[3]。在實際應用中,有必要綜合考慮矛盾的子目標,即權衡每個子目標。根據生物進化論發展起來的多目標進化算法(multi-Objective evolutionary algorithm,MOEA),由于其在解決高度復雜的非線性問題方面的優勢,已被廣泛使用。
多目標進化算法是指在各目標之間進行協調權衡和折衷處理操作,最終得到一組各個目標值所折衷的最優解,稱為 Pareto最優解[4]。Pareto最優解只是一個可接受的解,并且大多數進化算法的Pareto最優解的個數是無窮多的,而進化算法的最優解就是包含所有這些Pareto最優解的一個集合。在實際應用中,最優解集合的選擇通常取決于決策者對事務本身的了解程度,或個人意愿傾向 [5]。在此,經常會用到如下幾個基本概念[6]:
(1) Pareto支配(Pareto Dominance)。解x0支配:x1(x0>x1),當且僅當:
(2)Pareto最優解(Pareto Optimal Solution)。如果解x0是Pareto最優的,當且僅當:x1:x1>x0。
(4)Pareto前沿(Pareto Front)。所有Pareto最優解對應的目標函數值所形成的區域P:
如果某個解不受其所在的解集內的任何一個解支配,則該解關于解集非劣,稱為非劣解。后期的多目標算法的計算過程如下:對于每一個集群,首先找到其當前的最優解,即非控制解或非劣解,并且所有非劣解的集合構成非劣解集;然后,通過各種遺傳運算以及非劣解集的更新和升級,非劣解集不斷接近問題的Pareto前沿,算法最終的輸出即為非劣解集[6]。
這里,需要說明的是,Fε和Fa分別作為集合F的ε-Pareto解集和ε-Pareto近似最優解集,都不是唯一的。而一些靠近Pareto前端不是Pareto最優解但滿足ε-支配關系的個體卻都有可能包含在Fa中[7]。
2 基于多目標優化的信號燈配時模型
理論上,研究擬控制交叉路口的信號燈變化,從而優化城市道路的各項參數,但實際上,道路參數卻并非臻至完善,因為不同指標之間可能存在一些沖突,因此必須做出相應的調整,為十字路口的交通狀況選擇合適的控制方案。如果交通流量較小,應盡可能減少在十字路口停車的車輛數量,以減少機動車輛的停車位;如果交通流量大,則應提高交叉路口的交通速度[8]。交叉路口交通信號控制的意義在于:根據交通網絡中的交通流量,有效調整信號定時方案,以優化交通,提高交通效率。一般交叉路口的評價指標分為3種,即:出行時間效率、道路利用率、環境效益。其中,車輛通行效率和等待時間對信號燈的配時方案影響最大。因此,本次研究選擇交通效率、停留時間和停車次數作為優化指標,并且優化目標是爭取交叉路口的最高交通效率、最短停留時間和最少停車時間。約束條件選取周期長度、有效綠燈時間和機動車等待的最大數量3種,對交叉路口非飽和交通流的信號配時方案進行了優化[9]。
2.1 機動車停留時間
目前主流的交通停留模型有:Webster模型、HCM模型和Akcelik模型。Akcelik模型適用于計算過飽和情況下的機動車停留時間。本文中釆用Akcelik模型,見公式(4):
其中,考慮不完全停車的情況,f為停車次數修正系數,取值為0.9。
機動車在r時間段上,平均停車次數見公式(10):
其中,hrij 為在r時間段上由相位i到相位j每輛車的平均停車次數,單位為次。
這里,對研究時需用到的各種約束條件做闡釋說明如下。
(1)總時長約束。具體公式如下:
其中,lk表示k相位損失時間,取各相位綠燈間隔時間。
(2)有效綠燈時間約束。具體公式如下:
其中,gkmin表示k相位最短綠燈時間,此處取4 s。
(3)周期約束。具體公式如下:
其中,Cmax表示最大信號周期,一般取值為Cmax=200 s。Cmin表示最短信號周期,即在一個周期內,無滯留機動車。研究可推得數學公式為:
(4)排隊長度約束。具體公式如下:
其中,Nrijmax=DijC·L 表示車道內最大滯留機動車數;此處的Dij表示相鄰交叉口距離;L為機動車隊列的平均長度。
在綜合考慮通行效率、停車次數和停車時間3項優化指標和3種約束條件的情況下,創建交叉路口信號燈狀態控制函數為:
3 實驗與分析
在測試分析階段,選擇羅文慧的改進蜻蜓算法[5](下文用HDA表示),結合真實的城市道路情況對模型進行測試。測試分析結果詳見如下。
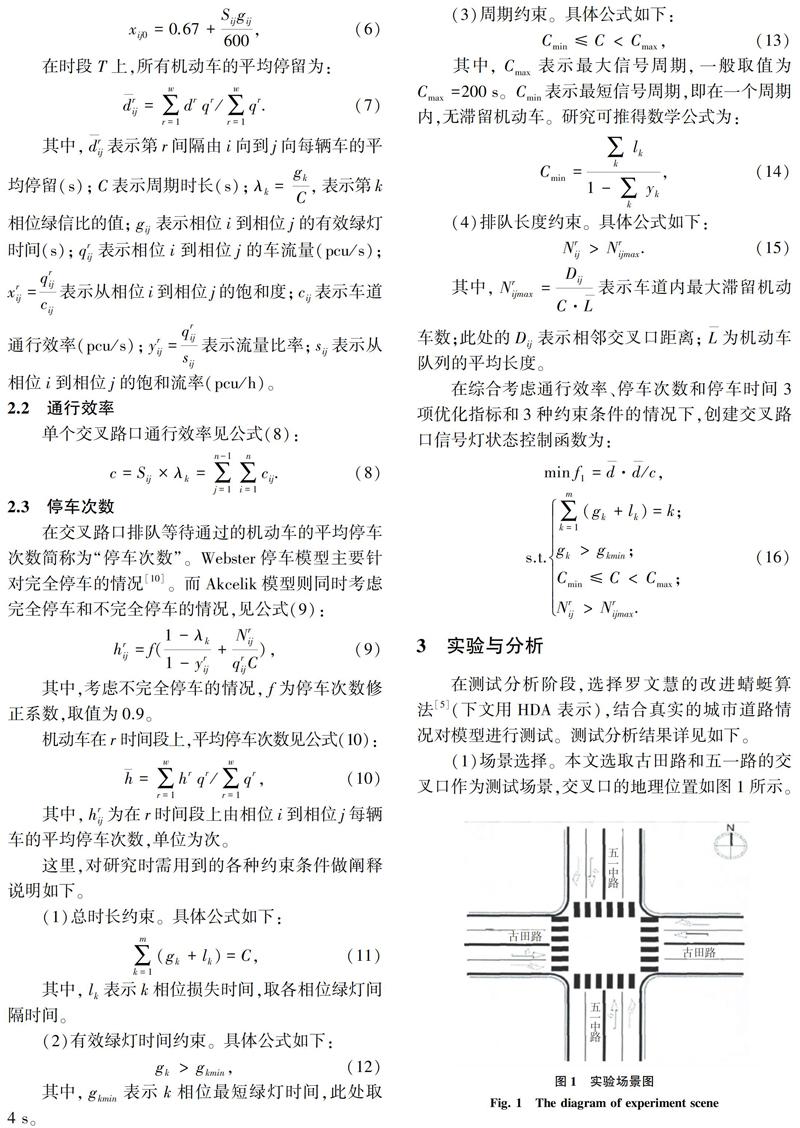
(1)場景選擇。本文選取古田路和五一路的交叉口作為測試場景,交叉口的地理位置如圖1所示。
由圖1可看出,交叉路口由東西方向和南北方向的2條城市主干路的交叉點組成。 東入口有一個右轉彎車道和一條左轉彎直行車道; 西入口有一個右轉彎車道和一條左轉彎直車道; 南入口處有一個右轉彎車道和一條左轉彎直車道; 北入口處有一個右轉彎車道和一條左轉彎直車道。
(2)信號燈配時參數。信號燈的變化除了可以控制交叉路口的機動車通行,對非機動車和行人也具有同樣的管控作用,設置信號燈的相位為2相位,C=100,相位設置圖及相位配時圖如圖2、圖3所示。
(3)存在的問題。無論高峰時段,還是非高峰時段,此路口的擁堵現象都較為明顯,路口等待通行的機動車較多,且在等候中停車次數較多,導致路口通行效率不高。
(4)結果分析。交叉路口通行基本參數見表1。由表1可見,文中選擇的古田路與五一中路交叉路口四個不同方向進口的車流方向、校正后的飽和流量、高峰時段每小時的交通量和流量比值。
同時,研究得到的實驗結果見表2。
4 結束語
分析可知,在表2中,通過對比可以看出,當車流量處于非高峰時段時,HAD模型的優勢并不明顯。但在車流量較大的高峰時段,優化后的HAD模型的優良性能將逐漸體現出來,即使得通過交叉路口的機動車停留時間更短,停車次數更少,顯著提高了城市交叉路口的通行效率。
參考文獻
[1] ?鄭夏,馬良. 一種多目標非線性優化的NSGA-II改進算法[J]. 微電子學與計算機,2020,37(7):47-53.
[2] 馬曉幸,楊華. 基于NSGA-Ⅱ的多目標控制算法的溫室監測控制系統[J]. 農村實用技術,2019(1):28-31.
[3] 張志勇. 波紋鋼管—UHPC組合防撞結構沖擊試驗及多目標優化研究[D]. ?長沙:湖南大學,2019.
[4] 魏武,郭燕. 基于擁擠距離的動態粒子群多目標優化算法[J]. 計算機工程與設計, 2011,32(4):1422-1425,1452.
[5] ?羅文慧. 智慧交通背景下道路交叉口交通流控制模型與算法研究[D]. 北京:北京交通大學,2018.
[6] ?李云彬. 多目標人工蜂群算法的研究與應用[D]. 沈陽:東北大學,2012.
[7] 李陽. ?三層光網絡中靜態虛拓撲設計的多目標智能優化算法研究[D]. 西安:西安電子科技大學,2012.
[8] 劉烽. 基于多目標進化算法的流程工業生產調度問題研究[D]. 長沙:國防科學技術大學,2009.
[9] 李曉. 自主水下機器人非連續目標跟蹤方法研究[D]. 沈陽:東北大學,2015.
[10]劉婷婷. 基于反饋的多目標人工蜂群算法研究[D]. 沈陽:東北大學,2013.
