用于汽車ADAS系統測試的軟目標車研究進展
2021-08-11 02:23:38李文禮李建波石曉輝
汽車工程學報 2021年4期
關鍵詞:測量
李文禮,李建波,石曉輝,王 戡
(1.重慶理工大學 車輛工程學院,重慶 400054;2.重慶車輛檢測研究院 汽車主動安全測試技術重慶市工業和信息化重點實驗室,重慶 401122)
近幾年,由于汽車ADAS技術發展迅速[1],對汽車ADAS的功能測試需求也不斷增長。基于對安全性和測試效率的考慮,一般不使用實車作為目標車輛參與測試,而是需要一種滿足車輛傳感器識別特性、動態特性高、碰撞時不損傷被試車輛,具有軌跡跟隨功能且測試效率高的替代目標車輛的測試設備,由于替代目標車(Surrogate Vehicles,SV)的碰撞主體部分通常由氣囊或泡沫等軟體組成,因此也被稱為軟目標車。
自2014年歐盟新車安全評鑒協會(European New Car Assessment Programme,Euro NCAP)將自動緊急制動(Autonomous Emergency Braking,AEB)系統的測試規程列入汽車整體評級中至今,其測試方法和要求不斷細化,最新協議分別對測試過程中的天氣狀況、周邊環境、被測車輛的輪胎狀況、AEB系統設置等做了詳細的規定[2],這對軟目標車的性能提出了更高的要求。2018年,中國新車評價規程(C-NCAP)將AEB系統的測試納入整車評級后,我國對軟目標車的需求逐年增加,但是目前成熟的軟目標車產業技術被國外科技公司壟斷銷售,價格昂貴,國內在這方面的研究處于起步狀態,有必要對軟目標車技術進行研發。本文介紹軟目標車的關鍵技術和研究進展,分析乘用車的電磁散射特性、視覺及光學特性,并著重介紹了乘用車的電磁散射特性中重要的衡量指標——RCS及其測試方法和研究進展,研究軟目標車對于毫米波雷達、攝像頭和激光雷達在傳感器識別方面的設計要求。
1 軟目標車發展歷程
2013年6 月,Euro NCAP制訂的AEB系統測試規程中規定了軟目標車選用標準及對AEB測試場景的要求。文獻[3]介紹了通用德國汽車協會(Allgemeiner Deutscher Automobile-Club,ADAC)為Euro NCAP提供的軟目標車——Euro NCAP 目標車輛(Euro NCAP Vehicle Target,EVT)(圖1)。它是由聚酯、聚乙烯、聚己二酰己二胺、氯丁橡膠和尼龍組成的類似汽車尾部及部分車身的氣球結構,外部尺寸為寬1600 mm,高1350 mm。氣球結構由一層聚氯乙烯(PVC)覆蓋,上面印有汽車的后窗、部分側窗、后燈和車牌等部件的圖像。軟目標車(氣球車)的顏色選用了易被傳感器識別的銀色,車體上噴繪了真實大眾途安汽車圖像來模擬汽車的后窗和輪胎,在一定程度上實現了車輛尾部的3D視圖。利用同真實汽車尾部雷達響應相同的角反射器來模擬汽車雷達特性,同時還使用了吸波泡沫和反光箔覆蓋干擾軟目標車雷達響應特征的背板和保險杠。軟目標車的動力系統由導航車提供,使用長達10 m的折疊式導軌連接。在發生撞擊時,導軌能夠按照預定軌道滑動,以此吸收碰撞產生的能量和沖擊。

圖1 Euro NCAP 2013年使用的軟目標車EVT
2015年6月,英國Moshon Data公司[4]生產的軟目標車在Euro NCAP協議要求的基礎上做出了部分改良,在軟目標車的底部加裝了吸收雷達波的泡沫,為提升測試效率,在軟目標車上安裝了拉繩和拉桿等能提升軟目標車安裝速度的裝置。2018年5月,Euro NCAP制訂的AEB系統測試協議提高了對軟目標車的測試要求[5]。圖2a為美國DRI公司生產的的軟目標車,其最高速度可達55 km/h以上,在各傳感器,包括毫米波雷達、攝像頭、激光雷達、光子混頻設備(Photonic Mixer Device,PMD)和紅外探測器(Infrared Detector,IR)識別特性方面皆仿制了典型的白色掀背式乘用車,動力系統為車體底部的移動平臺車(圖2b),圖2c為泡沫板材質的軟目標車內部結構,圖2d為軟目標車和被測車輛發生碰撞時的情形。移動平臺車一般由質量較輕的鈦合金制成,當被試車輛越上碾壓移動平臺車時,平臺車內置的懸架系統受壓力作用縮進平臺內部,此時,由移動平臺殼體承受重力,保護了移動平臺的懸架系統和輪子。由于平臺的高度較低且具有坡度,被試車輛會很容易越上平臺,這樣就保護了被試車輛不與軟目標車金屬結構碰撞。移動平臺車內置的GPS天線和可編程的控制裝置,能夠實現良好的路徑跟蹤能力。2018年8月,NORD與其團隊[6]分別分析了5家移動平臺制造商以及3家軟目標車制造商的產品,通過對比軟目標車發現,雖然其內部材質略有不同(充氣氣球和覆蓋有反光材料的泡沫板),但其傳感器響應特性并無明顯區別。該團隊還通過對Euro NCAP使用的全新EVT和經過多次碰撞后的EVT進行對比研究,旨在測試軟目標車經過多次撞擊后的光學和幾何特性的變化,并通過優化測試方法來消除或減少這種變化帶來的誤差[7]。
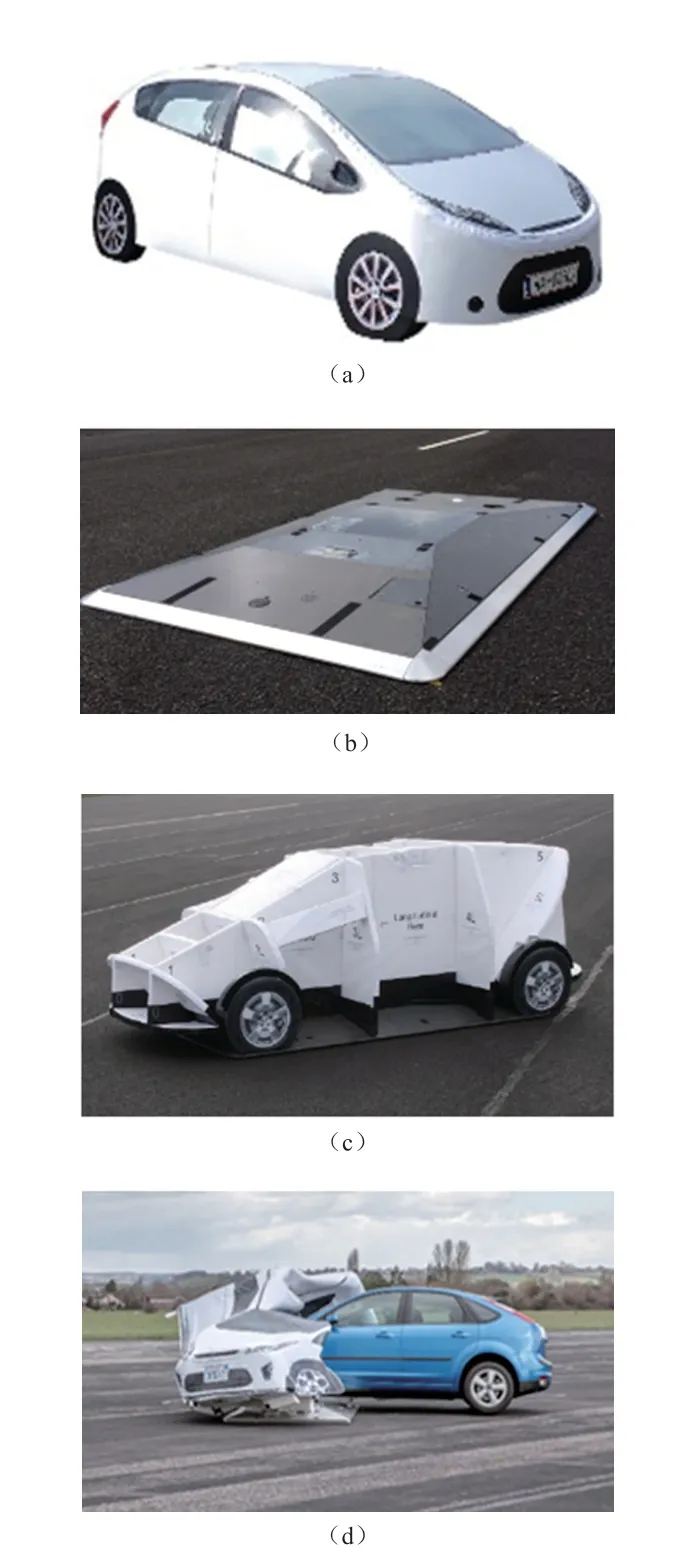
圖2 DRI公司生產的軟目標車
2019年,Euro NCAP規定AEB系統測試用軟目標車應具有3D視覺外觀以及實車的雷達、紅外線和LiDAR響應特征[2],必須使用符合規定的雷達反射和紅外線反射材料,同時反射材料不能干擾安裝在移動平臺車內的GPS發出的信號,必要時需使用雷達吸收材料(Radar Absorbing Material,RAM)來消除雜波。軟目標車的3維規格協議由Euro NCAP、美國高速公路安全管理局(National Highway Traffic Safety Administration,NHTSA)和美國公路安全保險協會(Insurance Institute for Highway Safety,IIHS)聯合制定,該協議旨在使軟目標車盡量在任何水平方向和任何沖突場景下都能模擬真實車輛的特性,同時將被測車輛損傷的可能性和被測車輛駕駛員受傷害的風險降到最低。
2 軟目標車設計關鍵技術
根據軟目標車的用途和Euro NCAP的AEB系統測試規程,總結軟目標車設計涉及到的關鍵技術包括[8-11]:
(1)軟目標車的首要特征就是在測試車輛發生碰撞時,盡量降低被試車輛的損傷或不受損傷。這就要求軟目標車車體部分材質為輕質材料或吸能材料,軟目標車底部動力裝置保證能使高速行駛的測試汽車越上平臺而不損傷其輪胎、懸掛裝置和底盤。
(2)為保證測試過程的準確性和可信度,軟目標車在視覺和雷達等傳感器識別特性上應盡量保證與實車一致。這就要求研發人員了解典型車輛型號與外部特征,掌握實車和各種材料的電磁散射特性和其他傳感器識別特性。
(3)為保證能較真實地還原各種測試場景和工況,要求軟目標車有良好的動態性能和軌跡跟蹤能力。動態性能指移動平臺車搭載假體車身部分后仍能保持較高的運動能力,在道路附著系數未知的情況下能夠按需求加、減速,以及軟目標車能夠與遠程基站實時通訊的能力;而軌跡跟蹤能力則是指軟目標車可以按既定路徑運動的能力,其參考路徑曲線與時間和空間皆相關。
(4)為降低測試成本、保證測試效率,還要求軟目標車有極強的自我保護能力和快速修復能力。
3 雷達散射截面及測試方法
車載毫米波雷達是ADAS系統中檢測目標的核心傳感器之一,由于其在惡劣的天氣條件下具有抗干擾性強和成本低的特點,在智能汽車中得到廣泛應用。毫米波雷達主要根據電磁波的散射特性來探測和識別道路交通中障礙目標的相對位置和目標類別。雷達散射截面(Radar Cross Section,RCS)是度量目標在雷達波照射下所產生回波強度的物理量,取決于目標車輛的物理和幾何參數,以及入射雷達波的相關參數,通常用10倍的RCS對數值表示[12],單位是dBm2。
軟目標車RCS的良好表征依賴于目標和雜波的正確統計和描述,BULLER等[13]對25輛實車的雷達響應進行了測量和表征,并通過極大似然估計將實測RCS擬合為伽馬分布(Gamma Distribution),優化了傳統的RCS表征方法。由于車載毫米波雷達通常安裝在車輛保險杠附近,離地面300 ~800 mm。而且雷達垂直面的有效波束范圍很窄,所以在垂直面上從不同角度、不同高度觀察被測物體時,必須保證無線電波反射結果一致。因此,BAI Jie等[14]提出了一種高度均勻的管狀標準物標代替行人進行雷達識別測試,嚴格對標車載雷達特性,分析了替代物的材料特性、尺寸、形狀、傾斜角度等方面對RCS的影響,評價了各種測試物標對電磁波的反射和吸收特性,以此達到在多種條件下更準確地模擬目標RCS的目的,對標準物標的研究有重大意義。
(3)必須保證水封排氣內水面的高度。水位過高,爐內壓力增加,水封有可能不能順利排氣。水位過低,水封密封效果降低,一旦無水,后果非常嚴重。
SILBERLING等[15]提出一種典型車輛和軟目標車雷達響應特征測量與分析的方法,并將該方法應用于8輛小型乘用車的雷達特性測試,以便更好地了解具有代表性的乘用車的雷達特征。該研究基于BULLER等[16]的研究成果,通過博世LRR3遠程雷達傳感器分別從5個角度和3種距離進行測量,試驗結果顯示,由于側視方向提供了最大的反射面且該反射面基本上都與傳感器垂直,所以車輛側視方向上的RCS數值最大,而車輛的前視、后視方向上的RCS數值要小一些,為軟目標車仿實車雷達散射特性設計提供了數據基礎。
地面反射是汽車目標RCS表征中測量不確定性的主要影響因素。車載雷達更趨向于關注近距離(相比于遠場條件)的RCS,同時,由于目標上的多個散射中心相互影響,目標特性與距離更相關[17-18]。KARLSSON等[19]研究了地面反射對在平坦的室外條件下進行的真實車輛或軟目標車RCS測量的影響。
TOSS等[20]提出了一種利用汽車目標RCS進行反向投影,從而獲取雷達反射率空間剖面的方法,該剖面輪廓可以評估目標的多個散射中心,對3D軟目標車與實車在雷達等傳感器特性方面的研究有重要意義。由于目標的散射中心通常由底層雷達數據和合成孔徑雷達成像算法得出,而在汽車測試中,底層雷達數據很難獲取,所以合成孔徑雷達成像較為困難。針對這種現象,該團隊提出了一種利用位置和RCS數據來表征任意角度雷達目標的方法并進行測量。在由AstaZero試驗場提供的直徑約為200 m的平坦瀝青路面上完成了該項測試,為了獲得目標車輛的全方位雷達屬性,使用搭載全球導航衛星系統(Global Navigation Satellite System,GNSS)的可移動小車圍繞固定目標車輛轉動(圖3),而不是場地性要求更高的汽車轉臺。
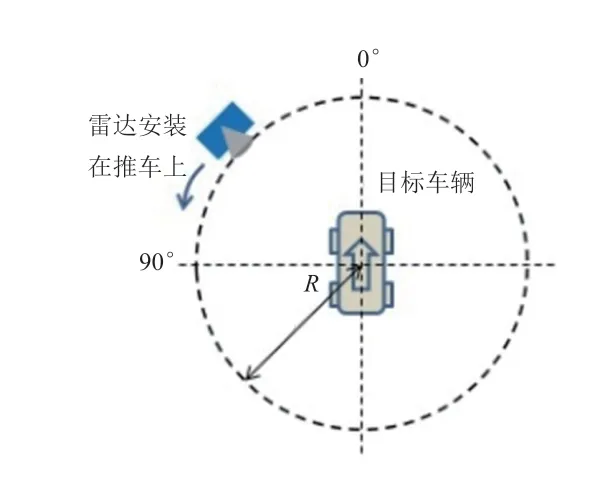
圖3 RCS測試場景
3.1 RCS測量原理
RCS計算公式是基于雷達的工作原理推導而來的,由雷達方程式可推出RCS表達式如下[21]:

式中:Pr、Pt分別為接收機和發射機的功率,W;Gr、Gt分別為接收天線和發射天線的增益;rr、rt分別為接收天線到目標和發射天線到目標的距離,m;λ為雷達工作波長,m。由式(1)可知,如果能通過準確的測量得到上述參數,那么RCS即可計算得出,但是在實際測試過程中有些參數很難精確獲得。通常目標物的RCS值采用一個RCS已知的標準金屬球或角反射器進行對比標定[22]。RCS測量系統主要包括雷達信號收發模塊和數據處理模塊。雷達信號收發模塊用于產生和發射波形信號,并通過接收機接收回波信號;數據處理模塊主要通過操控轉臺處理得到目標在不同角度下的RCS數值[23-24]。
3.2 RCS測試場景
RCS的定義是基于平面波照射下目標各向同性散射的概念,即假設雷達探測距離R是無窮大的,以此來消除探測距離R對RCS數值的影響。但在實際測試過程中,其入射波和反射波近似為點源發出的球面波,這就導致當目標車輛與雷達的距離較近時,目標物表面的干涉作用會使RCS數值發生明顯變化。因此,通常采用標準遠場條件和近場測量條件。
標準遠場條件:目標物與測試點間的距離R需滿足[25]:

式中:D為目標物的尺寸,m。標準遠場條件下目標車輛的RCS僅與目標物的幾何形狀、材料及入射波頻率、角度、極化相關,而與探測器無關,此時非平面波照射模型是最大的誤差來源[26]。
近場測量條件:當目標與測試點間的距離R不滿足式(2)時,即產生近場雷達散射問題[27]。由于目標的近場散射特性與雷達天線波束、雷達波調制方式及探測距離密切相關,所以該條件下的雷達散射問題就相對較復雜[28]。由于菲涅爾區(Fresnal Range,)中場的相對角分布與距離相關,平均場強在不同距離保持不變,所以近場測量一般在此區域內進行[29]。而在進行目標車輛的近場RCS測量時,只需將目標車輛置于固定距離的轉臺上(圖4),用確定參數的雷達對目標車輛進行360°的掃頻測量即可獲得目標車輛的近場散射數據[30-32]。

圖4 軟目標車在RCS測試轉臺上
在進行室外測試時,為了避免場外雜波對目標物的影響,通常會對測試場周圍提出要求,例如在國際標準化組織(International Organization for Standardization,ISO)發布的標準中,要求在測試場可觀測區內無其他建筑物、金屬或其他會干擾指定雷達測試目標車輛的強雷達反射物,路面由柏油或混凝土完全覆蓋并保持干燥,圖5為ISO中的室外測試環境要求[33]。
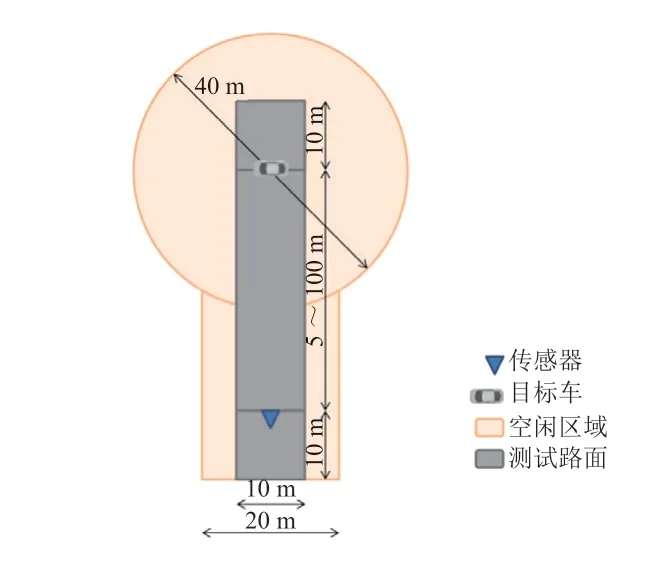
圖5 ISO建議的RCS室外測試環境
近場測量還可以在微波暗室內進行[34],相較于傳統的室外測試條件,它具有背景電平低、受氣候環境影響小、可全天候測試、工作頻率寬等優點[35-36]。在微波暗室里進行測量可以盡量消除其他物體反射的電波,提高相對遠場條件的測試精度。YAMADA等[37]提出了一種基于行人模擬的測試系統,該系統實現了在36 dB動態范圍內可測,可觀測到(-30)~(+5) dBm2范圍內的反射波強度。為獲得更精確的RCS,也可在微波暗室內對車輛進行測量(圖6)。
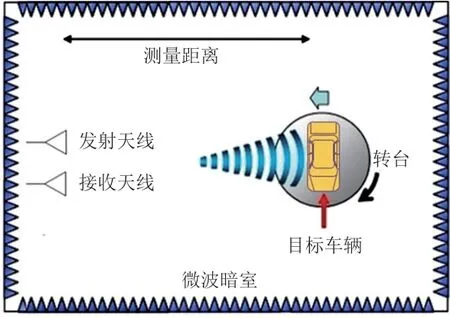
圖6 汽車RCS室內測試方案
3.3 RCS的標定
在測量目標RCS時,先使用一個RCS已知的標準金屬球或角反射器對傳感器進行標定(圖7)。圖8為金屬球RCS隨金屬球的周長和入射波長之比Ka變化的關系曲線,當Ka>10時,金屬球的RCS值趨于穩定并無限接近理論值πa2,所以標定過程多用標準金屬球反射器[38]。

圖7 RCS的標定目標物
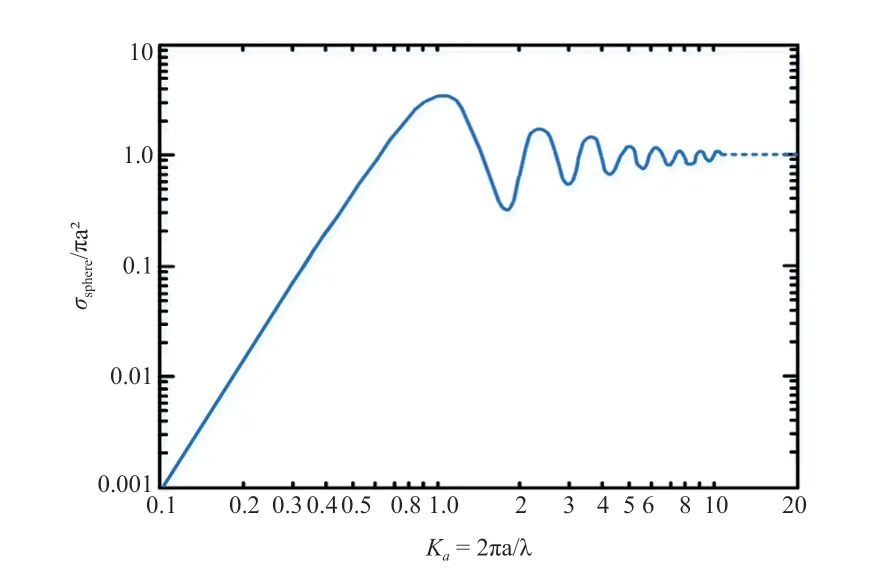
圖8 金屬球RCS隨Ka變化的關系曲線

式中:a為金屬球半徑,m。
RCS的標定通常在標準遠場條件下進行[39],圖9為RCS標定時的場景示意圖,圖中H為毫米波雷達通常安裝在車輛上的高度,而雷達與定標體之間的距離R0需滿足式(2),雷達傳感器在能夠檢測到對象的最遠距離開始向定標體逼近至R0處,測量得到定標體的RCS值。通常使用與金屬球反射器雷達響應差別較大的角反射器評估雷達測量的質量。
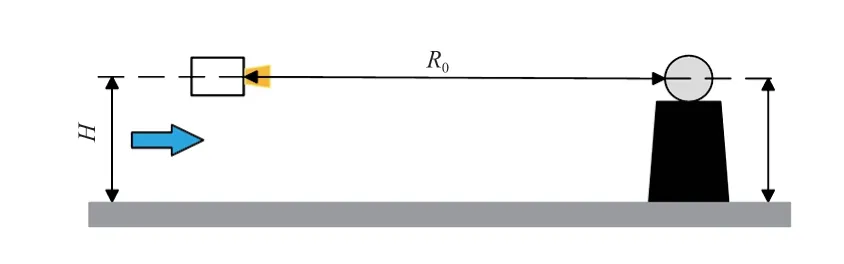
圖9 RCS測試標定場景
假設標準金屬球反射器的RCS值為σ0,此時雷達接收天線收到金屬球反射的功率為P0;目標車的RCS值為σ1,在各試驗條件未發生改變的情況下,雷達接收天線收到目標車反射的功率為P1,則有[19]:

圖10為目標RCS慣用的表征形式,圖中數據為8輛不同乘用車在各角度下的RCS值[33],乘用車的RCS峰值出現在±90°處,即車輛的側視方向上。
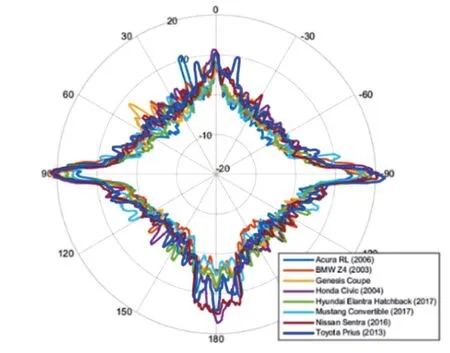
圖10 RCS表征形式
4 其他傳感器識別特性設計
車輛ADAS系統的傳感器感知系統除使用毫米波雷達以外還有多種傳感器輔助識別,其中較有代表性的是攝像頭和激光雷達,因此軟目標車的設計也應滿足這些傳感器識別特性。
4.1 攝像頭視覺特性設計
攝像頭系統從周圍環境捕捉圖像,并處理這些數據以檢測和區分目標對象[40],車載攝像頭通常安裝在后視鏡和擋風玻璃之間[41]。軟目標車為了滿足攝像頭視覺識別特性[3],把拍攝的汽車真實照片在軟目標車蒙皮上打印出來,利用陰影模擬技術和抗反射材料,可為攝像頭傳感器提供較為真實的汽車圖像。為給攝像頭傳感器提供更好的識別效果,可在汽車真實照片的基礎上增加反光材料和真實的車牌,此外,選擇銀白色外觀還可以使攝像頭系統在白天更易識別。為了減小不必要部分造成攝像頭系統的誤識別,可用淡灰色的皮革覆蓋在輪胎底部,以遮蓋底部的支承和牽引系統,如圖11所示[3]。

圖11 攝像頭效果圖
4.2 激光雷達反射特性設計
激光雷達(LiDAR)通過發射和接收激光脈沖來測量到物體的距離[42],通常三維激光雷達置于汽車頂部[43],可實時繪制目標車輛周邊的三維空間地圖和其他車輛的速度信息[44]。激光雷達與毫米波雷達工作原理大致相同,不同之處在于其發射的是光脈沖而不是電磁波,激光雷達使用波長在近紅外光(Near Infrared,NIR)范圍內的激光或LED光源,探測距離可達200 m,但在惡劣的環境條件(如烈日、霧、雨、灰塵和噴霧)下其探測性能會下降[45]。激光雷達與攝像頭同屬光學傳感器,但攝像頭依賴于可見光,而激光雷達則更依賴于目標表面的紅外反射率(Infrared Reflectivity,IR)[6],所以軟目標車上需配備足夠的反光部件,然而過大的反射會使激光雷達接收器飽和而導致故障,因此,測試用軟目標車的反射特性需與實物匹配。文獻[46]的研究結果表明,設計的目標假人可見皮膚表面部分的紅外反射率與真人皮膚的相似度在40%~60%之間,即可保證探測精度,文獻[6]中所測試的軟目標車經過多次碰撞后的IR(波長在900 nm附近)穩定在70%左右。
5 結論
軟目標車是汽車ADAS系統測試不可缺少的設備,它提高了被試智能車輛測試過程中的安全性和測試試驗效率。本文重點闡述了軟目標車對毫米波雷達傳感器的響應特征——RCS分布特征,以及其測量和數據處理方法,為軟目標車的開發和使用提供了參考依據。目前對軟目標車的研究主要集中在各類傳感器識別表現及其動力系統的動態控制性能和路徑跟蹤方面,隨著車路協同技術的發展,汽車ADAS系統的測試必將對軟目標車提出車聯網通訊技術和復雜工況的軌跡跟蹤能力等新的使用需求。同時,為了滿足新的車載傳感器和識別技術測試需求,軟目標車的性能也會不斷地更新和發展。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
