移動網絡中多用戶下行非相干MIMO通信
2021-08-11 07:48:00林夢瑩
無線電工程 2021年8期
林夢瑩,鄭 霖,楊 超
(1.桂林電子科技大學 信息與通信學院,廣西 桂林 541004;2.廣西無線寬帶通信與信號處理重點實驗室,廣西 桂林 541004)
0 引言
多用戶多輸入多輸出(Multiple Users Multiple Inputs Multiple Outputs,MU-MIMO)技術因能夠采用空分多址方式在相同的時間和頻率資源上與多個用戶進行通信[1],實現比時分多址方式更高的系統容量,已經成為IEEE802.11ac、802.11ax和5G無線傳輸的關鍵技術。當前研究的MU-MIMO系統大多數采用基于實時準確信道估計的相干檢測方式[2]。在快衰落、高速移動等復雜環境下,精確的信道估計、相偏和頻偏補償算法對硬件系統的要求較高。而非相干檢測無需實時精確的信道估計,不受相位噪聲的影響,可以降低接收機的復雜度,減少系統的開銷。
現階段對MU-MIMO非相干檢測算法的研究中多數是基于差分編碼,包括差分空時分組碼[3]、差分酉空時調制[4]。文獻[5]提出了一種基于差分空時分組碼的下行鏈路非相干檢測算法,在基站和用戶處均不需要信道狀態信息,降低了收發機的復雜度。但在用戶數量很大的情況下,該算法會導致正交擴展碼的長度過長,從而增大系統的開銷。文獻[6]針對MU-MIMO下行系統,提出在發射端對信號進行疊加編碼,接收端通過串行干擾抵消方法解調下行信道互干擾。文獻[7-8]提出在大規模MU-MIMO下行系統中采用差分下行傳輸,提出一種基于功率空間分布信息的預編碼器用于多用戶干擾消除,收發兩端都不依賴于信道狀態信息,在接收端采用決策反饋差分技術檢測信號,具有較低的復雜度。
上述基于差分編碼主要針對的是分集多用戶MIMO下行系統,且通常假設在碼塊傳輸期間信道響應保持準靜態而且是空間上不相關的,在高速移動場景下,這樣的假設難以成立。
信道的快時變性主要源于高速移動產生的多普勒頻移及多普勒擴展,為了降低多普勒頻移的影響,學者們提出了非相干能量檢測算法[9-10]。文獻[11]提出了一種低復雜度能量檢測接收機,它利用了接收分集支路的衰落增益的大小,推導了其誤符號率表達式,結果表明,基于部分信道信息的能量檢測方案性能明顯優于完全不需要信道狀態信息的非相干檢測方案,且還能保持非相干檢測器的低復雜度結構。文獻[12]提出基于ASK調制的能量檢測接收機,推導了高信噪比條件下加權包絡檢測接收機的近似誤符號率的閉合表達式。文獻[13]提出一種基于Chirp-BOK調制的最佳隨相檢測算法,避免了信道引入的隨機相位影響。文獻[14]提出一種基于MFSK調制的MIMO能量檢測算法,該非相干能量檢測算法可以抵抗隨機相位的干擾、多普勒頻偏。文獻[15]將文獻[14]中的非相干能量檢測系統模型進一步簡化,提出了隨相檢測系統模型,在接收端解調信號時,其具有更低的復雜度。
上述基于平方律非線性處理的能量檢測算法不僅具有復雜度低、抗多普勒頻移的特點,且可以獲得較大的空分復用增益,但研究針對的是點對點MIMO通信,尚未有文獻研究其在多用戶環境下的可行性,對于如何解決多個用戶復用信道產生的多用戶干擾問題也尚未涉及。
本文以文獻[12]為基礎,研究非相干MIMO檢測算法在多用戶環境下的應用問題。首先針對多普勒頻移一致性問題,討論了非相干MIMO空分復用算法在多用戶MIMO上行系統和下行系統中的可行性。然后從理論和仿真上分別驗證了常規線性預編碼技術可以有效解決非相干MU-MIMO系統的干擾問題。結合預編碼干擾消除技術,非相干MIMO空分復用檢測算法在多用戶環境下具有很好的抗多普勒頻移的性能。
1 MIMO-FSK非相干空分復用
1.1 信道模型
對于高鐵通信、地空通信和車地通信,其信道是典型萊斯信道,信道矩陣H(t)可以表示為:
(1)
式中,Hs(t)表示視距分量;Hd(t)表示散射分量。當β=0時,到達接收機的信號全部是視距信號。假設MIMO系統有N根發射天線和M根接收天線,發射端與接收端之間屬于遠場傳輸,所有的通道可以視為具有一致的多普勒頻移[16-17]。采用的信道模型表示為:
(2)
式中,ejφ(t)表示多普勒頻移引起的相位旋轉因子。
1.2 MIMO FSK隨相檢測
假設MIMO系統有N根發射天線和M根接收天線。在該系統中,第n根發射天線的第w個FSK符號表示為:
snw(t)=(1-cnw)ej2πf1t+cnwej2πf2t,
(3)
式中,f1,f2分別表示2個正交頻率;cnw={0,1}表示第n根發射天線的第w個二進制碼元,發送信號矩陣S的第w列表示為:
(4)
接收信號可以表示為:
Y=HS+N,
(5)
式中,Y為接收信號矩陣,維度為M×T;S為發送信號矩陣,維度為N×T,T表示一個符號時長;N為高斯白噪聲,則第m根接收天線的第w個符號可以表示為:
ymw=hmsw+nmw,
(6)
式中,hm表示H的第m行;sw表示發送端的第w個碼元,因此ymw可以表示為:
(7)
式中,ejφ(t)表示多普勒頻移引起的相位旋轉因子,在一個符號時間內看作是常數ejφ。對ymw(t)做隨相處理,得到:
(8)

(9)
最終的接收信號可以表示為:
(m,w),
(10)
(11)
MIMO系統的等效信道矩陣為:
=R(∑H),
(12)
式中,R(·)表示取實部;∑為對角矩陣,且∑kk=hk1e-jθk1+hk2e-jθk2+…hkNe-jθkN。則經過隨相處理后,MIMO系統可以等效為:
=+。
(13)
從推導結果看,雖然MIMO FSK非相干空分復用檢測系統采用了非線性平方律處理,但系統仍然可以等效為一個線性實系統,且等效信道矩陣和等效信號維度沒有發生改變,可以采用常規的線性檢測算法。
2 下行鏈路非相干MU-MIMO
2.1 非相干MU-MIMO的可行性分析
在MU-MIMO上行系統中,令xk∈Nk×1表示第k個用戶的信號,k=1,…,K,yMAC∈Nk×1表示基站的接收信號,NT×Nk表示第k個用戶和基站之間的信道矩陣,那么接收信號可以表示為:
(14)
由模型可知,基站接收的信號都是來自所有用戶的信號,由于各個用戶具有不同相對運動方向、運動速度,導致各用戶的信號到達基站的多普勒頻移不一致,得到:
(15)
式中,φmn,φmj表示的是任意不同用戶的2路信號到達基站時的相位變化。由于φmn≠φmj,這會造成等效矩陣的變形,造成檢測性能的惡化。因此,MIMO-FSK隨相處理算法不適用于上行鏈路。
在MU-MIMO下行系統中,令x∈NR×1表示基站給所有用戶發送的信號,yk∈Nk×1表示第k個用戶的接收信號,Nk×NT表示第k個用戶和基站之間的信道矩陣,那么第k個用戶的接收信號可以表示為:
(16)
從用戶k來看,其接收到的信號x全部來自基站,信號x的多普勒頻移僅僅和用戶k與基站之間的相對運動方向和速度有關,即在一個符號時長內,所有信號都具有一致的相位變化,得到:
(17)
式中,φmn,φmj表示的是基站發送給用戶k的任意2路信號的相位變化,由于φmn=φmj,其等效矩陣并未發生改變。在多用戶MIMO下行系統中,雖然各個用戶具有不同的運動方向和速度,多普勒頻移不一致,但不會影響用戶k對接收信號做非相干隨相處理,接收端的等效系統模型不會改變。因此MIMO-FSK隨相處理算法可以用于多用戶MIMO下行鏈路。
2.2 MU-MIMO下行鏈路預編碼論證
假設多用戶MIMO經過預編碼后的系統等效為一個NT發NR收的系統,且NT=NR,定義全局編碼信道矩陣為:
(18)
式中,H是實際的信道矩陣;F是所有用戶的預編碼向量所構成的矩陣,經過平方律隨相處理后,全局的等效編碼信道矩陣為:
(19)
式中,R(·)表示取實部;(·)*表示取共軛;∑A為對角矩陣,其第k個對角元素可以表示為Σkk=ak1e-jθk1+ak2e-jθk2+…+akNTe-jθkNT,k=1,2,…,NR。
當用戶接收端為單天線時,稱之為MU-MISO系統。要求經過隨相處理后全局的等效編碼信道G為一個單位矩陣,假設∑AA是一個對角矩陣,因為∑A為對角陣,因此可以得到A是一個對角矩陣。且有:
(20)
因為A是一個對角矩陣,有akje-jθkj(j≠k)=0,則對式(20)有:
(21)
即要求預編碼矩陣F滿足:
|A|=|HF|=I,
(22)
式中,|·|表示對矩陣各個元素取模值。可以得到隨相處理系統預編碼的充分條件:
F=HH(HHH)-1,
(23)
(24)
由此可見,式(23)仍然滿足式(24)。基于隨相處理的MU-MISO系統仍然可以采用迫零預編碼算法。同理,對于MU-MIMO系統可以采用塊對角化算法[1]。
3 仿真分析
通過仿真驗證迫零預編碼、塊對角化算法在多用戶MIMO下行隨相處理系統中的可行性。通過仿真分析高鐵信道下隨相處理在多用戶MIMO下行鏈路的性能,將其與PSK相干檢測進行比較。MIMO FSK隨相處理系統發射端均采用V-BLAST編碼和FSK調制。用戶數用K表示,假設FSK帶寬B=2.5 MHz,采樣速率為Fs=20 MHz,符號速率Rb=1.25 MHz,每一幀包括1 000個數據符號和20個訓練符號。
迫零預編碼MU-MISO系統和SISO系統性能如圖1所示。
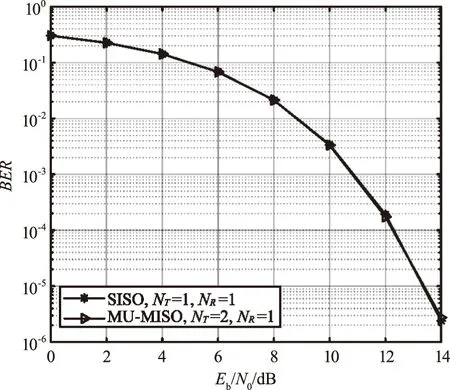
圖1 迫零預編碼MU-MISO系統和SISO系統性能Fig.1 The performance of zero-forcing precoding MU-MISO system and SISO system
由圖1可知,當MU-MISO系統在發送端進行迫零預編碼時,用戶的性能與SISO系統的性能曲線幾乎重合,當Eb/N0>14 dB時,其誤碼性能在10-5以下。由于在MU-MISO系統的發射端采用迫零預編碼消除多用戶干擾會使得MU-MISO系統失去發射分集增益,因此其性能與SISO系統的性能一致。MU-MIMO系統和SU-MIMO系統性能比較圖如圖2所示。
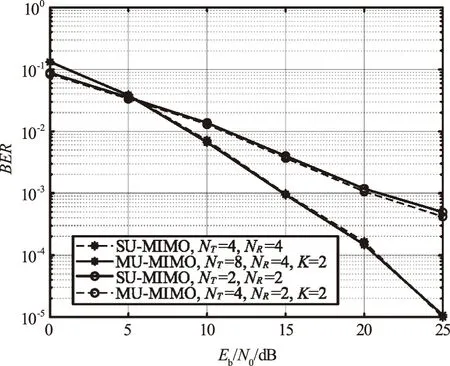
圖2 塊對角化預編碼MU-MIMO系統和SU-MIMO系統性能Fig.2 The performance of block diagonalization precoding MU-MIMO system and SU-MIMO system
MU-MIMO下行鏈路發射端經過塊對角化算法預編碼后,接收端的用戶性能與SU-MIMO隨相檢測系統的性能一致,說明在多用戶MIMO隨相處理系統采用塊對角化預編碼可以完全消除共信道干擾。
高鐵信道下MU-MIMO下行鏈路中FSK非相干隨相處理與PSK相干檢測的BER性能對比圖如圖3所示。假設發射天線數為8,有2個用戶,其接收天線數均為4。仿真采用了文獻[14]中的高鐵信道模型,采用了塊對角化預編碼算法。fD表示多普勒頻移,萊斯因子為10 dB。FSK與PSK采用相同的帶寬和碼元速率。隨著fD增大,信道相干時間減小,對于固定幀長的PSK相干檢測系統而言,其BER性能急劇下降,在fD=0.04 kHz時,其誤碼率性能接近10-2。相比而言,當Eb/N0>15 dB時,FSK非相干檢測系統的性能在10-3以下。信道相干時間減小對FSK非相干檢測系統的影響不大,但當fD=0.43 kHz時,巨大的多普勒頻移導致接收端檢測頻率不匹配,也會使得其系統性能急劇下降。

圖3 高鐵信道下MU-MIMO FSK和MU-MIMO PSK性能Fig.3 The performance of MU-MIMO FSK and MU-MIMO PSK in high-speed railway channel
4 結束語
本文解決了基于能量檢測的非相干MIMO檢測算法應用在多用戶環境下所面臨的問題,包括其可行性以及多用戶共信道干擾問題。由于該檢測算法要求信號的多普勒頻移具有一致性,因此其適用于多用戶下行系統。雖然基于平方律處理的非相干能量檢測算法會造成非線性干擾,但經過理論推導和仿真分析可以驗證常規線性迫零預編碼算法、塊對角化預編碼算法仍然是消除多用戶干擾的有效方法。此外,非相干MIMO能量檢測的抗多普勒頻移特性使得多用戶MIMO系統的預編碼矩陣不需要跟蹤多普勒頻移的實時變化。下一步研究如何降低發射端對精確信道狀態信息的依賴。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
海峽科技與產業(2016年3期)2016-05-17 04:32:12
商用汽車(2016年4期)2016-05-09 01:23:12