溫室大棚智能采集節點裝置設計
2021-08-14 05:27:04蔣興加
農業工程與裝備 2021年2期
關鍵詞:規則
蔣興加
(廣西機電職業技術學院電氣工程系 廣西 南寧 530007)
隨著“互聯網+”技術應用的日益普及,我國經濟加速邁入數字經濟時代,同時也催生著各產業中“物聯網”的升級換代。根據溫室大棚生產精細管控內在需求,在溫室大棚中引入智能管控平臺勢在必行。智能采集節點裝置作為“物聯網”的基礎層,可實現信息采集、控制決策執行、報警和通訊功能,為提升溫室大棚生產系統的安全、高效、實用性提供有效支撐。
1 系統方案分析
為提升溫室大棚管控和數據通訊性能,基于物聯網架構,引入分布式計算機體系結構,溫室大棚管控系統如圖1所示。
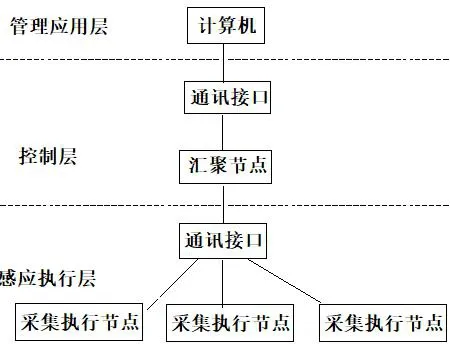
圖1 溫室大棚管控系統結構示意圖
控制系統分為管理應用層、控制層和現場感應執行層[1],充分發揮了分布式系統集中管理、監視、操作和分散控制的優勢。將計算機作為管理應用層具有資源豐富、功能完善等優點,便于系統的操作、管理、監視。設計管理應用層與控制層之間的通訊時,采用快速可靠的 TCP/IP方式。控制層的匯聚節點作為管理應用層和感應執行層的中轉站,可實現數據的上傳下達。感應執行層可實現現場數據的采集和控制動作的具體執行,提升系統的安全可靠性。設計匯聚節點和采集節點的數據通訊時選用LoRa無線通訊技術。該技術具有低功耗、遠距離、成本低等優點,特別適合溫室大棚系統。
2 采集節點裝置硬件設計
溫室大棚的主要作用是確保作物的高效、高品質生長,除了監控常規的水、肥、土壤等基本要素外,還需要對溫度、濕度、光照、二氧化碳濃度等指標進行監控。根據采集和控制的功能要求,智能采集節點裝置以微處理器為核心,實現溫度、濕度、光照、二氧化碳濃度的檢測,以及水、加熱、光照、排氣的控制。采集節點模塊的硬件構成,如圖2所示。
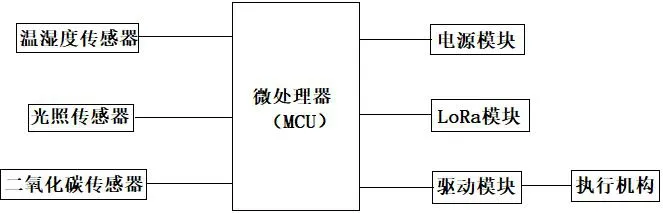
圖2 采集節點模塊方框示意圖
該模塊選用Microchip SAMD21微處理器,采用基于Arduino開源電子原型平臺,具有跨平臺、開發簡便高效等特點。SAMD21微處理器主頻為48 MHz,有256KB flash和32KB SRAM,有20個通用GPIO以及通訊接口,能滿足采集節點的功能和性能要求。選用遠洋科技開發的LoRa通訊模組為LoRa模塊,具有體積小、功耗低、傳輸距離遠和抗干擾能力強等特點,可方便快速、靈活地進行產品設計。
選用基于數字模塊采集技術和溫濕度傳感技術開發的DHT11為空氣溫濕度傳感器,具有品質卓越、超快響應、抗干擾能力強、性價比極高等優點。選用YL69[2]土壤濕度傳感器,有數字比較輸出和模擬信號輸出兩種方式,方便實用。選用HA2003光照傳感器,利用先進光電模塊,將光照強度轉化為模擬信號輸出。選用韓國SOHA生產的SH-300-DS型二氧化碳傳感器,具有適應高濕度環境等特點,可輸出模擬和數字兩種信號。選用固態繼電器驅動模塊,實現開關或PWM控制輸出,完成水、肥、光照、排氣對應執行機構的控制。
3 采集節點裝置軟件開發
3.1 控制方案
采集節點裝置的軟件主程序開發流程如圖3所示,先將系統進行初始化配置,然后不斷采集數據,經MCU處理之后通過LoRa無線模塊發送到匯聚節點,同時根據檢測的數據結果,按照溫室大棚生產條件,輸出控制和報警信號,確保溫室大棚各指標性能良好。
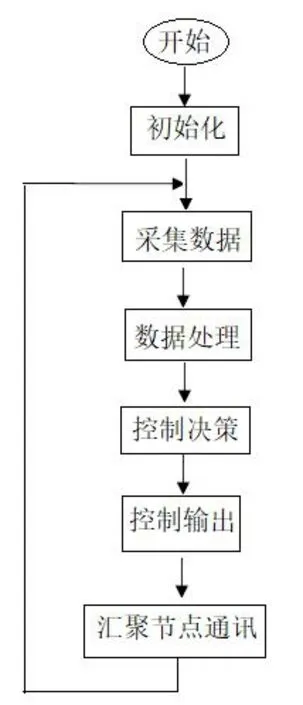
圖3 主程序開發流程圖
為提高系統抗干擾能力,將溫度、濕度、光照、二氧化碳濃度采集的數據基于3次平均濾波處理,以提高數據精度。匯聚節點基于LoRa通訊協議控制多個采集節點。將數據傳輸方式設置為透明傳輸模式。在該模式下,只要模塊的地址相同、信道相同、無線速率相同,就可高效地實現無線通訊。由于模糊控制具有適應性強、容錯能力高、采用自然語言開發等特點[3]。為提升控制精度,將控制方案由傳統的通、斷兩位控制改進為模糊控制算法(FCS)。
3.2 模糊控制算法
模糊控制算法(FCS)是指從輸入的連續精確量中,利用模糊推理,求出相應輸出清晰值的控制算法。選用適用于實時控制的Mamdani推理方法,模糊控制算法步驟為:輸入精確量的模糊化處理;模糊規則及模糊控制規則表的確定;模糊輸出控制量的清晰化。由于一維模糊控制具有簡便、高效、實用特性,因此將智能采集節點有關指標的控制方案設計思路確定為基于一維模糊控制。
3.2.1 清晰量模糊化
(1)語言變量和語言變量值。一維模糊控制器輸入語言變量為誤差信號e,輸出語言為光照、排氣、灌溉所需的控制量。為兼顧控制精度和效率,模糊語言的子集均由“正大”(PB)、“正中”(PM)、“正小”(PS)、“零”(Z)、“負大”(NB)、“負中”(NM)、“負小”(NS)7個模糊詞集組成。
(2)語言變量隸屬函數的設定。由于三角形隸屬函數具有高分辨率、高靈敏度的控制特性,適合系統控制高性能的需要。采用三角隸屬函數的模糊控制,其三角隸屬函數變量的隸屬度計算如式(1)所示:式中的a、b、c為模糊變量集的論域范圍,由三角隸屬函數曲線確定。

(3)清晰量轉換為模糊量。誤差e和控制量都需從基本論域通過量化轉換到離散論域,即連續的隸屬函數轉換為離散點的隸屬值,采用賦值表的形式揭示清晰量和模糊量的轉換關系。
3.2.2 模糊控制規則
Mamdani推理的CRI法,其控制規則形式為:If E=AiThen U=Cj,其中i=1,2,…m,j=1,2,….n,規則由專家和現場經驗確定,得到模糊關系R。模糊控制規則利用模糊控制響應表(FCT)揭示輸入與輸出之間的關系,再根據已知的輸入模糊量Ai,通過模糊關系R,求出對應的控制量。
3.2.3 模糊控制規則響應表(FCT)
FCS有多種實現形式,主要有合成推理的查表法、合成推理的解析公式法、合成推理的關系矩陣法。由于查表法能大大提高模糊控制的實時效果,又能節省內存,因此選用查表法為模糊控制算法,將基于專家知識和實際工程經驗的運行規律作為模糊控制規則。
3.2.4 模糊量清晰化
將從模糊控制器FCT表所得的模糊量清晰化,可得到精確輸出值。清晰化方法有重心法(centroid)、最大隸屬度法(Mom)、中位值法(bisector)。選用簡單實用的Mom法進行反模糊化處理。
3.3 程序開發
將模糊輸入、輸出變量的模糊關系、模糊規則和控制響應表事先離線存放于微處理器的存儲器中。選用查表法為模糊算法不僅能提升系統實時性,還能降低系統對硬件的要求。模糊查表算法流程如圖4所示。
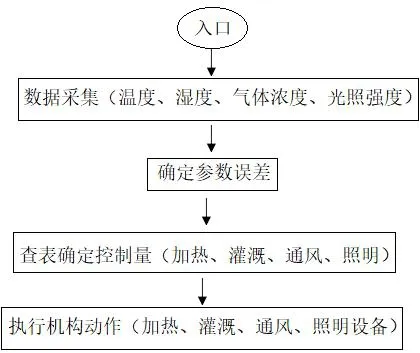
圖4 模糊查表算法流程圖
程序基于ArduinoIDE平臺及wiring語言開發,核心子程序主要包括系統初始化、參數采集、數據處理、模糊控制算法(FCS)和LoRa通訊代碼。初始化子程序主要用于設置通訊參數、指標給定值、參數采集、模糊控制表;參數采集子程序主要完成周期性獲取溫度、濕度、光照、二氧化碳濃度的實際值;數據處理子程序主要完成采集參數的抗干擾處理和模糊化處理;模糊控制算法子程序主要完成模糊決策、指導執行機構相應動作及報警;LoRa通訊子程序主要完成采集節點與匯聚節點的雙向數據傳輸,為系統監控提供橋梁。
4 結論
為提升傳統溫室大棚的管控和通訊性能,筆者基于物聯網架構,設計開發了智能采集節點裝置,該裝置通過對溫度、濕度、光照、二氧化碳濃度數據的采集,進行抗干擾處理,提高了所采集數據的精度。將執行機構的通、斷兩位控制改進為模糊控制后,具有良好的抗干擾性和優越的動、靜態性能。將有線通訊調整為LoRa無線通訊,減少了布線并提了高效率。試驗結果表明,該裝置有效提升了工作對象的性能,有較好的自適應性和實用價值。
猜你喜歡
作文周刊·小學一年級版(2022年28期)2022-05-30 10:48:04
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
法律方法(2019年3期)2019-09-11 06:26:16
中國外匯(2019年7期)2019-07-13 05:44:52
幸福(2018年33期)2018-12-05 05:22:42
環球飛行(2018年7期)2018-06-27 07:26:14
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
運動(2016年6期)2016-12-01 06:33:42
