雙向可控硅原理及在家電產品中應用研究
2021-08-17 02:49:20龔輝平
日用電器 2021年7期
關鍵詞:信號
龔輝平
(珠海格力電器股份有限公司 珠海 519070)
引言
雙向可控硅是一種硅可控整流器件,也稱作雙向晶閘管。這種器件在電路中能夠實現交流電的無觸點控制,以小電流控制大電流,具有無火花、動作快、壽命長、可靠性高等優點。雙向可控硅的應用場景廣泛,如調光臺燈、加熱功率的無級調節等。本文從雙向可控硅的工作原理、工作象限和關鍵參數等進行分析入手,得出雙向可控硅控制家電產品中功率為10 ~ 2000 W的阻性加熱負載的注意事項,確保系統工作可靠,電磁干擾穩定。
1 雙向可控硅的工作原理及應用方式
雙向可控硅有三個管腳,控制極G、主電極A1 、A2 ,其屬于半控性器件,向控制極G外加正向觸發脈沖使可控硅導通,可控硅一旦導通則必須在電壓過零時才會自行關斷[1],其實是電流過零時,可控硅IT電流小于保持電流IH,可控硅才關斷。雙向可控硅符號如圖1所示。

圖1 雙向可控硅符號
可控硅導通:要保證可控硅的可靠導通,主要考慮的因素有兩個:一個是門極觸發電流IG需要高于芯片規格書的IGT;一個是流過可控硅的IT電流需要達到閉鎖電流IL之后,才能撤離門極觸發電流IG。雙向可控硅開通時序如圖2所示。
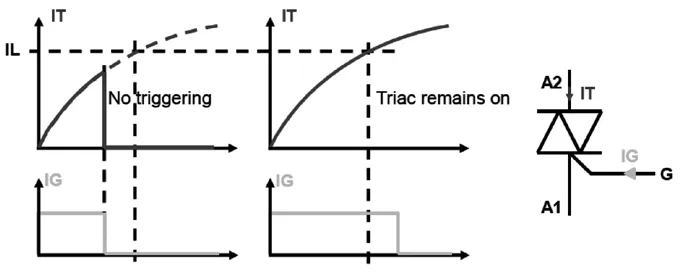
圖2 雙向可控硅開通時序
根據可控硅不同的應用場合,可控硅有斬波控制和零電壓開關(即過零導通)兩種方式(如圖3、圖4所示),斬波控制是在交流電源電壓非零點進行觸發,存在比較大的dV/dt、dI/dt,零電壓開關控制在零點進行觸發,相對斬波控制不存在dV/dt、dI/dt的問題,或者數值比較小。
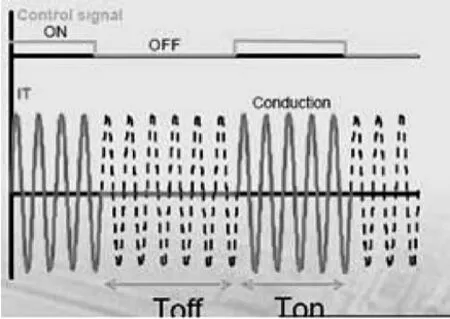
圖3 斬波控制
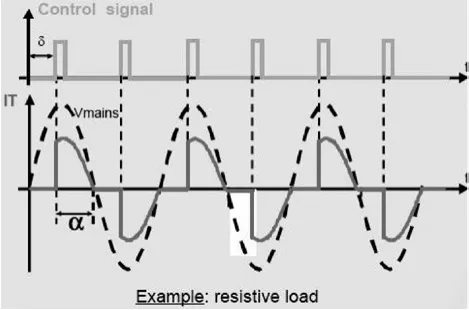
圖4 零電壓開關控制
2 可控硅的工作象限
就工作象限而言,可控硅可以分為三象限和四象限可控硅,四象限相對來說是屬于比較早的產品,三象限是比較新的產品。圖5中根據門極觸發電流Ig的電流方向和A2 、A1的電壓大小進行象限區分的說明。第一象限Q1 :Ig為灌電流灌入柵極,VA2 -A1 > 0;第二象限Q2 :Ig為拉電流從柵極流出,VA2 -A1 > 0;第三象限Q3 :Ig為拉電流從柵極流出,VA2 -A1 < 0;第四象限Q4 :Ig為灌電流灌入柵極,VA2 -A1 < 0,此象限的灌電流較高。

圖5 四象限可控硅
四象限的可控硅理論上都是能夠在一二三四象限進行工作,但是當工作在第四象限下可控硅需要較大的門極觸發電流[2],且可控硅抗電流和沖擊的能力比較弱,即dI/dt參數相對于其他的工作象限會偏低,可控硅容易誤觸發或損壞,因此我們要盡量避免其工作在第四象限,最常見的情況就是它們工作在第一三象限組合,第二三象限組合。
3 家電產品中阻性加熱負載使用可控硅控制的可靠應用要點
3.1 可控硅的四個工作階段
以T3035H-6I為例對關鍵參數進行分析。首先分別對可控硅的各個工作狀態下需要注意的參數進行分析、評估,分為OFF、TURN-ON、ON、TURN-OFF這四個階段,如圖6。

圖6 可控硅的四種工作狀態
3.1.1 OFF:斷態
可控硅斷態的情況下,應該關注dV/dt,過大的dV/dt會引起可控硅的誤導通,惡劣情況下會將可控硅擊穿。
引起誤導通的機理,由于可控硅內部存在寄生電容,并且這個寄生電容與可控硅的通態均方根電流成正相關關系(即可控硅通態電流越大,由于制作工藝問題其內部的寄生電容也越大),可控硅A2 、A1兩端的電壓變化率dV/dt會產生相應的容性電流,當dV/dt超過規定值,則可能通過寄生電容的充放電與門極構成回路而導致誤導通。
如圖7中,容性電流IG=C*(dV/dt),所以在設計中應該重點關注該參數,有效地預防和提高可控硅的抗干擾能力,在電路上主要有兩個方法:
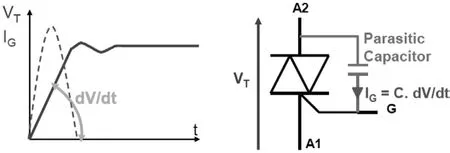
圖7 可控硅寄生電容
1)在可控硅A2 、A1兩端增加RC阻容回路,如圖8左,吸收脈沖電壓,有利于改善EFT性能;
2)在門極增加泄放電阻Rgk,如圖8右,為產生的容性電流提供泄放通路。
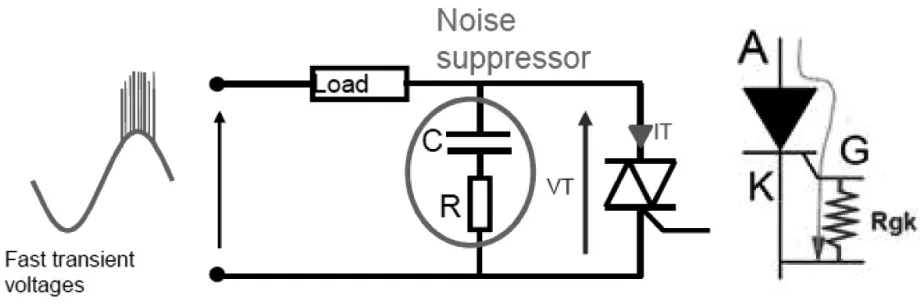
圖8 提升抗干擾能力的措施
在斷態下要測試上電開機瞬間或者進行EFT即電快速瞬變脈沖群實驗時需要評估該電壓變化率是否滿足器件規格書的要求,上電瞬間評估dV/dt時,最惡劣的情況應該是在波峰或波谷的瞬間上電,通過示波器監控的方法測試和計算dV/dt的值。
3.1.2 TURN-ON:開啟瞬間
在可控硅開啟瞬間需要重點關注dI/dt,尤其是在斬波應用當中,采用過零導通方式其dI/dt相對比較小。dI/dt超標問題同樣也可以利用阻容回路來抑制電流的變化率。
3.1.3 ON:通態
可控硅導通期間,應該重點評估可控硅溫升問題,需要注意的是塑封的可控硅溫度最高點在可控硅背面,可以適當選擇高結溫的可控硅。同時需要關注結溫對其他參數帶來的影響,及關鍵參數的降額。
3.1.4 TURN-OFF:關斷瞬間
在可控硅關斷瞬間需要重點關注(dI/dt)c和(dV/dt)c這兩個參數,也即可控硅的換象能力,需要注意的是這與dV/dt和dI/dt這兩個參數是不一樣的。當可控硅在切換象限的時候,電壓的變化率(dV/dt)c較高,這個時候比較高的電壓沖擊對可控硅兩邊產生比較高的負荷,所以如果參數本身抵抗能力較弱的情況下,可控硅就比較容易被打壞;(dI/dt)c也是類似的情況,可控硅換象限的時候,沖擊電流會比較大,如果可控硅的抗電流沖擊的能力比較差,也就比較容易被打壞。
3.2 家電產品中阻性加熱負載可靠使用可控硅控制的要點
斬波控制存在dV/dt、dI/dt,存在對于對可控硅的壽命不利,同時會帶來很高的EMC設計成本,在家電加熱負載中功率相對比較大,建議選擇零電壓開關即在電壓零點附近進行觸發的方案,避免系統帶來的電壓、電流沖擊。
3.2.1 IGT門極觸發電流
門極觸發電流是保證可控硅可靠導通的門極電流,應該注意的是IGT受溫度的影響較大,變化曲線如圖9所示,當結溫較低時,所需要達到的IGT越來越大;當結溫較高時,所需要達到的IGT越來越小,也即越來越敏感。并且也可以看出工作在不同象限所需要的IGT變化曲線也是不同的,當結溫較高時,工作在Q1象限的門極觸發電流會稍大于Q3象限的門極觸發電流。所以在設計驅動電路時,需要使門極觸發電流大于兩倍或者三倍的IGT。同時為了提高可控硅的抗干擾能力,在可控硅選型的時候,可以適當選擇觸發電流大一點的可控硅,可以避免外界雜波對門極的干擾,引起誤觸發。
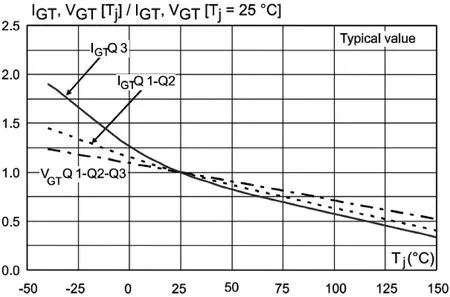
圖9 門極驅動電流、驅動電壓與結溫的關系
3.2.2 IT(RMS):均方根通態電流
圖10為通態電流與殼溫特性曲線,根據殼溫的變化,其通態電流會降低。在方案設計初期,務必對可控硅的溫升進行評估計算,選擇合適的散熱器。
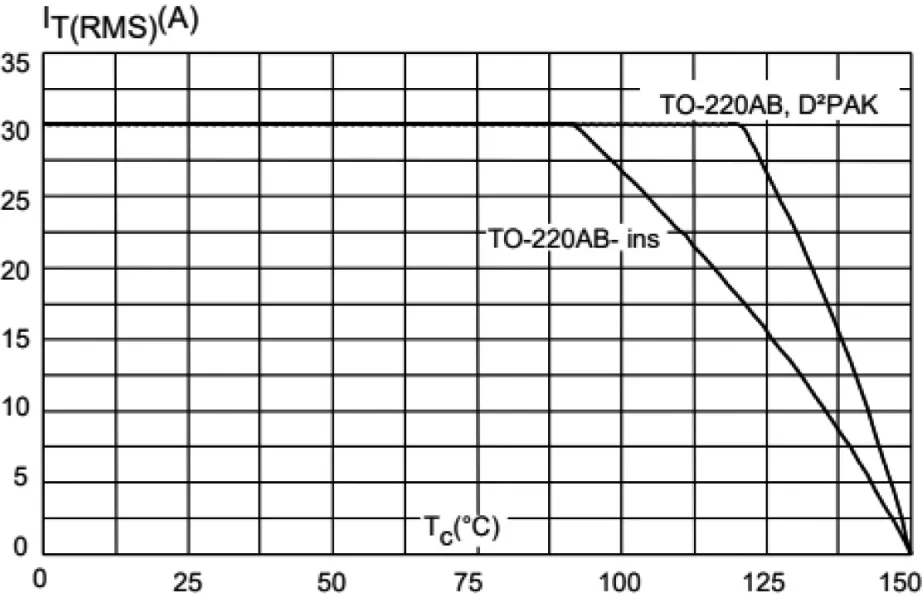
圖10 導通電流有效值和殼溫關系
3.2.3 VDRM/VRRM:可重復峰值斷態電壓
可控硅選型時,需要保證均方根通態電流和可重復峰值斷態電壓有足夠的降額,盡量保證降額至60%使用。
3.2.4 VGT和VGD
VGT:門極觸發電壓,為提供足夠的門極觸發電流所應該達到的門極觸發電壓,且該門極觸發電壓與IGT相同,也與可控硅的工作結溫關系密切,變化曲線可以參考圖9。
VGD:門極不觸發電壓,為保證可控硅的可靠關斷,需要保證門極電壓不超過該電壓值。
3.2.5 IH和IL
IH:保持電流,即可控硅IT電流低于保持電流IH,可控硅才自動關斷;
IL:閉鎖電流,即可控硅IT電流大于閉鎖電流IL,可控硅才能完全導通。
4 家電產品中阻性加熱負載應用可控硅控制時的電磁干擾一致性設計要點
通過對可控硅的特性及應用要點分析,可總結出如下兩點。
1)門極觸發電流IGT的大小受溫度影響,溫度越低,IGT越大,可控硅的導通瞬間dV/dt和dI/dt越大,隨著可控硅工作自身溫度變高,其導通瞬間dV/dt和dI/dt會變小;
2)不同象限的門極驅動電流不同,比如第三象限的門極觸發電流要比第一象限大,則在第三象限提供驅動信號時,則產生的dV/dt和dI/dt會更大。
在應用選型和電路設計上務必牢記以上兩點,否組系統工作時很容易出現電磁干擾如騷擾電壓、騷擾功率等實驗不合格或者測試結果一致性差的情況。現從可控硅工作必需的過零信號檢測和驅動信號的設計上需要注意的事項進行分析。
4.1 過零信號檢測電路的設計和信號采集
可控硅無論是斬波控制還是零電壓開關即過零導通控制方案,其控制上均需要檢測交流電壓的零點電壓。50 Hz的市電在20 ms周期有2個過零點,從負到正的過零點稱為正向過零,從正到負的過零點稱為負向過零,過零檢測技術據此可分為單向過零檢測和雙向過零檢測[3]。過零檢測電路通過一定的手段檢測出電壓零點的時刻,確保后續的處理裝置能夠準確地檢測到該信號從而實施相應的控制策略。
使用單向過零和雙向過零檢測技術時,必須在理論上分析其采樣到的過零點和真實過零點是否存在偏差,以及不同工作條件下的一致性情況,理論上要求采樣和真實的零點偏差小而且一致性好。如果系統獲取的過零信號存在一些不足,需要通過其它一些手段進行彌補,包括硬件參數的選型規避、軟件補償等等。
過零信號須選擇上升沿、下降沿或邊沿觸發等硬件中斷觸發方式,并設置中斷為較高優先級,查詢方式理論上存在一個比較大的最小誤差比如100 us,為此不建議使用查詢方式采集過零信號。
4.2 可控硅驅動信號產生的設計
可控硅的驅動信號優先選擇MCU硬件產生,如芯片MCU資源有限無法由硬件產生驅動信號,需使用中斷應用程序對IO口的高低電平來產生驅動信號的條件下,則務必選擇較高優先級別的中斷,確保驅動信號準確發出。
對于零電壓開關的應用方案減小可控硅導通瞬間A1和A2的電壓是解決EMC的有效方法,圖11是雙向可控硅的典型應用電路,門極觸發電壓取決于R5以及限流電阻R4的大小,兩個電阻的選型將影響到系統的電磁干擾性能。在硬件上可以減小限流電阻R5以及減少驅動信號和過零信號之間的時間間隔,但要評估好不同工作條件下可控硅導通時刻的一致性。如果硬件電路上無法保證各象限導通時刻的電壓值一致,可考慮在軟件上確保在同一象限開通,在軟件上避免在第三象限產生觸發信號可以有效改善EMC的傳導效果。
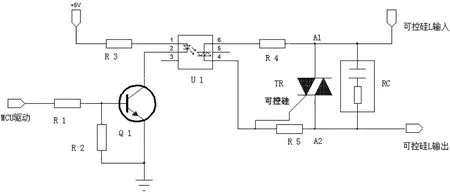
圖11 雙向可控硅驅動電路的拓撲結構
圖12、圖13分別對應限流電阻為510 Ω、255 Ω時可控硅A1、A2的波形,dV/dt分別約為91 mV/us、80 mV/us,即限流電阻越小則產生的電磁干擾越小,圖14白色部分是通過示波器監控A1、A2電壓波形,時間坐標ΔX = 580 us,理論上希望ΔX 數值小且一致性好。
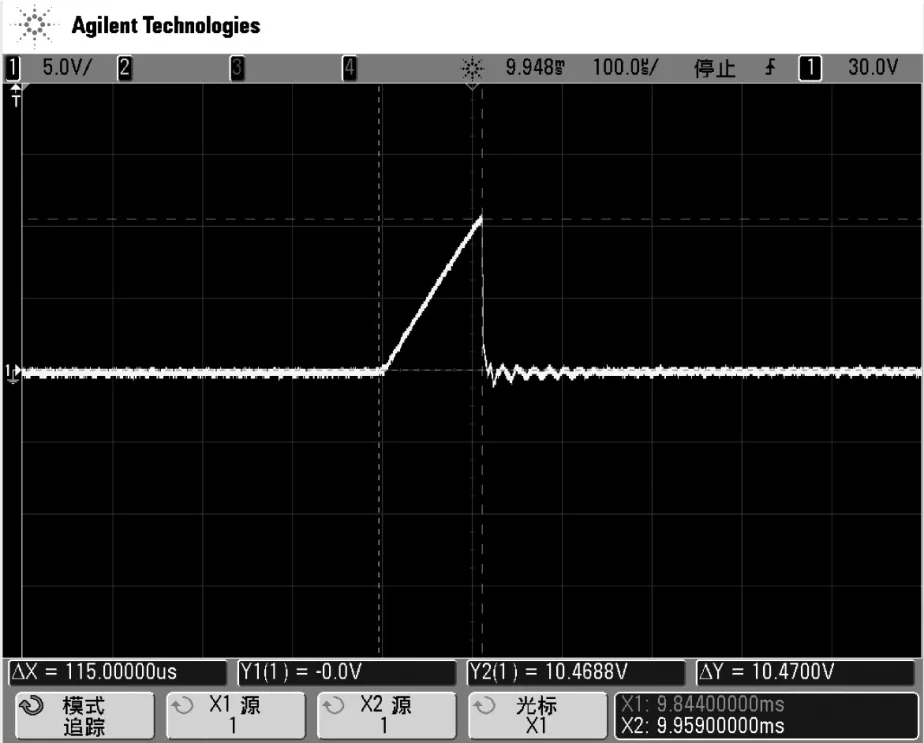
圖12 限流電阻為510 Ω時A1、A2波形
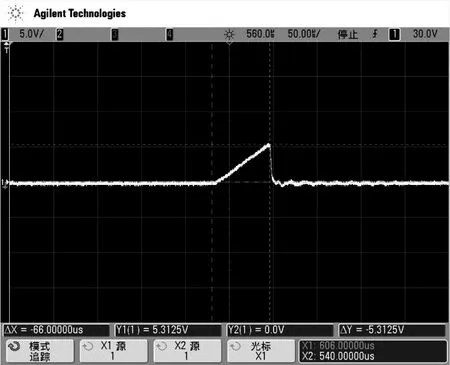
圖13 限流電阻為255 Ω時A1、A2波形
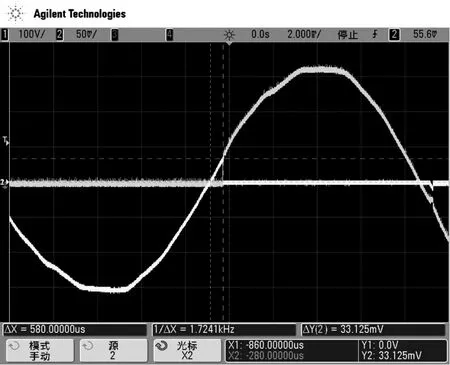
圖14 白色為開通時刻A1、A2兩端的電壓
5 總結語
通過對雙向可控硅的關鍵參數和四個工作狀態分析,輸出雙向可控硅在四種狀態中需要重點關注的參數指標、提高抗干擾的一些措施,以及門極驅動電流、均方根通態電流IT(RMS)等設計選型要求,保證系統可靠工作。在電磁干擾一致性設計方面,圍繞過零信號檢測和雙向可控硅驅動信號的設計,采用硬件和軟件相融合思想,在過零信號軟件采集、驅動信號電路的參數選型等方面進行分析,并驗證限流電阻大小對dV/dt的影響等。在設計上最大程度降低電磁干擾和干擾的穩定性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
