全電子聯鎖道岔模塊復位控制系統的設計與實現
2021-08-17 08:46:58謝智多孫瑞
鐵道通信信號 2021年7期
謝智多,孫瑞
某城市軌道交通線路全電子聯鎖系統,在運營使用過程中有時會發生因道岔模塊死機故障導致道岔無法正常操動的問題。當發生故障時,通常需對道岔模塊進行手動復位操作,才能使道岔操動恢復正常。通過分析發現,瞬間檢測不良可能是導致道岔模塊死機的主要原因,但當前暫無有效的解決辦法。由于地鐵運營列車間隔時間短,道岔模塊故障會對列車運行造成很大影響。為了最大限度地減小此類故障對運營的影響,地鐵公司在各車站配備信號值班人員進行24 h值守,這不僅造成運營成本增加,也給信號設備維護人員帶來很大的工作壓力。因此,設計一套在道岔模塊出現死機故障時能夠及時快速發現、精準定位報警、遠程控制復位的故障應急處理系統,是地鐵公司的迫切需求[1-3]。
1 系統結構設計
道岔模塊復位控制系統由中心服務器、控制終端、車站控制單元、通信單元及網絡設備組成。系統結構見圖1。
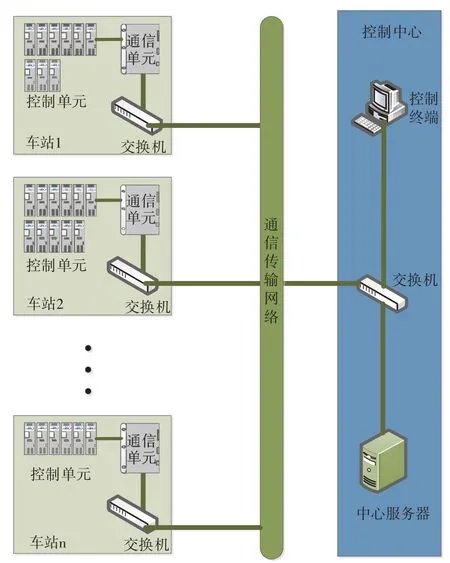
圖1 道岔模塊復位控制系統結構
道岔模塊復位控制系統在每個車站設置1個通信單元,負責與中心服務器進行通信,接收復位控制命令并上傳道岔模塊狀態信息;對應每個道岔模塊設置1個控制單元,負責與車站通信單元通信,接收控制命令并上傳道岔模塊狀態信息;中心服務器負責與各站通信單元通信,收集各站信息并下達控制命令;控制終端負責提供人機交互界面,并與中心服務器進行數據交互。
1.1 控制單元設計
1)設計方案。當道岔模塊死機時,對應通道的故障指示燈點亮,因此可以通過實時監測故障指示燈狀態,判斷道岔模塊是否出現死機故障[4]。當道岔模塊故障時,通過控制單元的復位執行電路對道岔模塊進行復位操作,等同于人為按壓復位按鈕。
為了提高故障指示燈狀態采集的準確性,對每個通道的故障燈狀態進行雙路采集。由于每個道岔模塊設有2條通道,因此每個控制單元設計4路故障指示燈狀態采集電路。
為了滿足信號產品對安全性能的要求,復位執行電路采用雙脈沖控制電路加無觸點開關的方式執行復位操作。通過對脈沖控制電路進行周期性自檢,可及時發現復位執行電路的故障,并報送給復位控制系統的中心服務器[5-6]。
控制單元將采集到的故障指示燈及自身的工作狀態信息通過CAN總線發送給通信單元,通信單元通過以太網將信息傳送給中心服務器,各控制終端可以通過中心服務器獲取這些信息并進行展示。操作人員可根據報警提示確認是否需要進行復位操作,當選擇復位操作時,系統下達控制命令給相應的控制單元,執行遠程復位道岔模塊的操作。
2)硬件原理。對故障指示燈狀態的采集,可通過光電耦合器件和施密特觸發電路,采集故障指示燈端電壓,對波形進行整形處理后輸出狀態信號,這種方式對原電路的正常工作產生較小的影響[7]。
故障指示燈狀態監測采用雙路并聯采樣方式,這種采集方式可以保證當一路取樣電路故障時不影響整體的采集功能[8]。同時,通過雙路并聯采集電路的相互校驗,完成采樣電路自檢的功能。故障指示燈狀態采集電路原理見圖2。

圖2 故障指示燈狀態采集電路原理
當接收到復位操作命令時,控制單元通過脈沖信號控制復位信號動態隔離電源輸出,使動態隔離電源1、動態隔離電源2同時工作,無觸點開關K1、K2同時閉合,復位信號線與地線連通,通過將復位管腳電平拉低實現復位操作。復位控制電路原理見圖3。

圖3 復位控制電路原理
1.2 通信單元設計
通信單元由雙CAN總線接口、以太網接口及MPU處理器等組成。
1)CAN總線。雙CAN總線與復位控制單元組成CAN總線控制環,完成局部工業網功能,保證通信暢通和實時控制。
2)以太網接口。接收服務器下達的控制命令,通過CAN總線傳達給相應的控制單元執行,并將執行的結果反饋給服務器。當無命令執行時,定時將所管理的控制單元的狀態信息發送到中心服務器。
3)MPU處理器。將雙CAN總線及網口實時緊密聯系起來,完成信息的橋接及部分變量的暫存。
1.3 軟件結構
根據道岔模塊復位控制系統的特點,系統軟件采用模塊化設計,主要由終端軟件、服務器軟件和下位機軟件3部分構成[9]。
1)終端軟件。終端軟件共設計7個模塊:操作顯示模塊提供人機界面供操作人員使用,并將執行的結果進行展示;報警模塊負責對道岔模塊死機的信息進行記錄和分析;用戶管理模塊負責處理用戶管理、權限設置、密碼設置、復位模式設置等操作;存儲模塊負責對報警信息及復位操作信息進行存儲;統計模塊負責對報警信息及復位操作信息按照車站、道岔、日期、次數進行統計;查詢模塊負責實現條件檢索功能,可以按照類別、時間、車站、道岔等條件進行查詢;通信處理模塊負責與中心服務器進行通信,收發相關命令及信息。
2)服務器軟件。服務器軟件共設計4個模塊:操作顯示模塊提供人機界面供操作人員使用,并將執行的結果進行展示;存儲模塊負責對報警信息及復位操作信息進行存儲;分析處理模塊負責分析處理與業務相關的信息;通信處理模塊負責與終端進行通信,并將信息發送給下位機,同時接收下位機回送信息。
3)下位機軟件。下位機軟件共設計3個模塊:通信處理模塊負責與中心服務器進行通信;執行模塊負責命令執行,將要執行的命令傳送給復位電路,實現復位操作;控制處理模塊將上位機傳送來的命令傳送給執行模塊去執行、或者按照服務器下放的權限,根據采集到的故障指示燈狀態自動判斷操作時機。
4)數據流程圖。道岔模塊復位控制系統軟件數據流程見圖4。

圖4 系統軟件數據流程
2 系統功能設計
1)故障自動報警功能。當控制單元檢測到故障指示燈點亮時,自動將報警信息通過通信單元上傳到中心服務器,由中心服務器分析處理后推送給各控制終端。
2)手動復位功能。信號設備維護人員通過控制終端查看報警信息,由具有控制權限的人員確認并發起復位操作命令,通過中心服務器處理后,經過通信單元下發到控制單元,并執行復位操作。
3)自動復位功能。在報警采集及復位操作被認定為可靠的情況下,由具有控制權限的人員在控制終端上設定自動復位功能,該功能可以在系統檢測到報警后自動執行復位操作,同時將報警及復位操作信息記錄下來,供運維人員查詢。
4)用戶管理功能。包括用戶管理、密碼設置、權限設置、復位模式設置等。
5)報警信息存儲功能。系統對報警信息及復位操作信息進行存儲,存儲時間不小于1年。
6)統計功能。系統對報警信息及復位操作信息按照車站、道岔、日期、次數進行統計,并通過日、月、年報表的形式進行展示。
7)查詢功能。系統支持條件檢索功能,可以按照類別、時間、車站、道岔等條件進行查詢。
3 管理流程設計
系統遠程控制道岔模塊復位操作管理流程[10]見圖5。通過車站控制單元采集故障指示燈狀態,采集信息實時上傳中心服務器進行分析處理;當發現故障指示燈點亮時,向控制終端推送報警信息,由有操作權限的維護人員進行判斷,如果是故障狀態,則向車站下達復位操作命令,車站復位控制單元接收命令后執行復位操作。

圖5 復位操作流程圖
4 結論
全電子聯鎖道岔模塊復位控制系統是根據地鐵運營公司對道岔模塊死機故障快速復位的需求而設計的,該系統實現了道岔模塊死機狀態的準確識別、故障自動報警、手動復位、自動復位、報警存儲、報警統計、報警查詢等功能,能夠滿足道岔模塊死機故障快速復位的需求,最大限度地縮短了運營過程中的故障處理時間。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中華手工(2017年2期)2017-06-06 23:00:31
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
