無人機(jī)及三維激光掃描儀技術(shù)在沙灘剖面動態(tài)監(jiān)測中的應(yīng)用及測量精度分析
2021-08-17 05:17:34陳秋明黃發(fā)明
應(yīng)用海洋學(xué)學(xué)報 2021年3期
關(guān)鍵詞:測量
陳秋明,黃發(fā)明,宋 鵬
(自然資源部第三海洋研究所,福建 廈門 361005)
砂質(zhì)海灘是濱海旅游的重要載體,對海岸線的侵蝕防護(hù)也有著不可估量的作用。但在密集的人類活動影響下,我國砂質(zhì)岸線的侵蝕情況不容忽視。
我國近海海洋綜合調(diào)查與評價專項成果調(diào)查數(shù)據(jù)顯示,全國3 200 km的侵蝕岸段中,砂質(zhì)海岸有2 400 km;全國49.5%的砂質(zhì)海岸處于侵蝕狀態(tài),海灘破壞和退化相當(dāng)嚴(yán)重[1]。
為提升沙灘穩(wěn)定性和防護(hù)能力,恢復(fù)砂質(zhì)海岸生境,可采取沙灘養(yǎng)護(hù)技術(shù)進(jìn)行人工干預(yù)。通過人工補沙修復(fù),并輔以構(gòu)筑物建設(shè),營造適合沙灘養(yǎng)護(hù)的人工岬角,以維持、修復(fù)或重塑海灘功能。沙灘養(yǎng)護(hù)技術(shù)不僅能有效保護(hù)海岸免受侵蝕,降低海岸帶風(fēng)暴潮災(zāi)害,還能在改善海岸環(huán)境、發(fā)展旅游業(yè)方面發(fā)揮巨大作用,在我國沿海省市,以及美國[2]、歐洲[3]、澳大利亞[4]等發(fā)達(dá)國家均得到廣泛應(yīng)用。據(jù)統(tǒng)計,截至2019年8月,我國已完成或正在進(jìn)行的海灘養(yǎng)護(hù)工程共97項,分布于全國35個城市,修復(fù)岸線總長超過120 km[5]。
海灘養(yǎng)護(hù)是一個系統(tǒng)的、動態(tài)的過程,需要有完整的監(jiān)測體系作為支撐。通過長期的地形變化監(jiān)測,對沙灘修復(fù)工程前后進(jìn)行比較,是判斷修復(fù)是否達(dá)到預(yù)期效果的直接依據(jù)。目前,沙灘監(jiān)測的常規(guī)方法是使用全球衛(wèi)星導(dǎo)航系統(tǒng)(Global Navigation Satellite System, GNSS)的實時動態(tài)(Real-time Kinematic, RTK)技術(shù)進(jìn)行典型剖面測量獲取三維坐標(biāo)。這一方法測量精度高、操作簡單,但周期性長,難以全面覆蓋測區(qū),信號較差地方的數(shù)據(jù)采集問題較為困難[6],且海岸帶具有潮漲潮落的特性,要求測量工作在較短時間內(nèi)完成[7],因此傳統(tǒng)的測量方法存在一定的局限性。
隨著近年來無人機(jī)(Unmanned Aerial Vehicle, UAV)及三維激光掃描技術(shù)的日益成熟,采用新技術(shù)開展沙灘剖面動態(tài)監(jiān)測逐步得到推廣。無人機(jī)攝影及三維激光掃描技術(shù)在地形監(jiān)測中具有高效、直觀等優(yōu)勢,但受外界因素影響較大,監(jiān)測精度有待檢驗。在實踐中,應(yīng)用不同技術(shù)開展沙灘剖面測量,并通過測量結(jié)果的優(yōu)勢互補,對快速、有效、全面了解沙灘剖面變化形態(tài),具有重要的現(xiàn)實意義。
本研究以廈門天泉灣沙灘養(yǎng)護(hù)工程為研究對象,采用GNSS RTK接收機(jī)實地測量、無人機(jī)航攝、三維激光掃描儀掃測3種手段,分別獲取沙灘三維地形數(shù)據(jù),通過測量數(shù)據(jù)的比對,分析不同手段在沙灘剖面監(jiān)測中的測量精度,并提出改進(jìn)的設(shè)想,為新型監(jiān)測方法在沙灘監(jiān)測中的應(yīng)用提供實踐參考。
1 材料與方法
1.1 研究區(qū)概況
研究區(qū)(廈門天泉灣岸段)位于廈門島南側(cè)(圖1),是強侵蝕岸段。2014年6月采用差異性填砂技術(shù),選擇粒徑為10 cm左右的卵石進(jìn)行修復(fù),構(gòu)建了我國首個卵石養(yǎng)灘工程。工程全長約1 km,通過優(yōu)化剖面設(shè)計,在西側(cè)營造長300 m的沙灘,東側(cè)營造長700 m的礫石灘,運用大粒徑卵石設(shè)計穩(wěn)定海灘消能剖面,有效降低海岸泥沙輸運的速率,提升海灘穩(wěn)定性[8-10]。
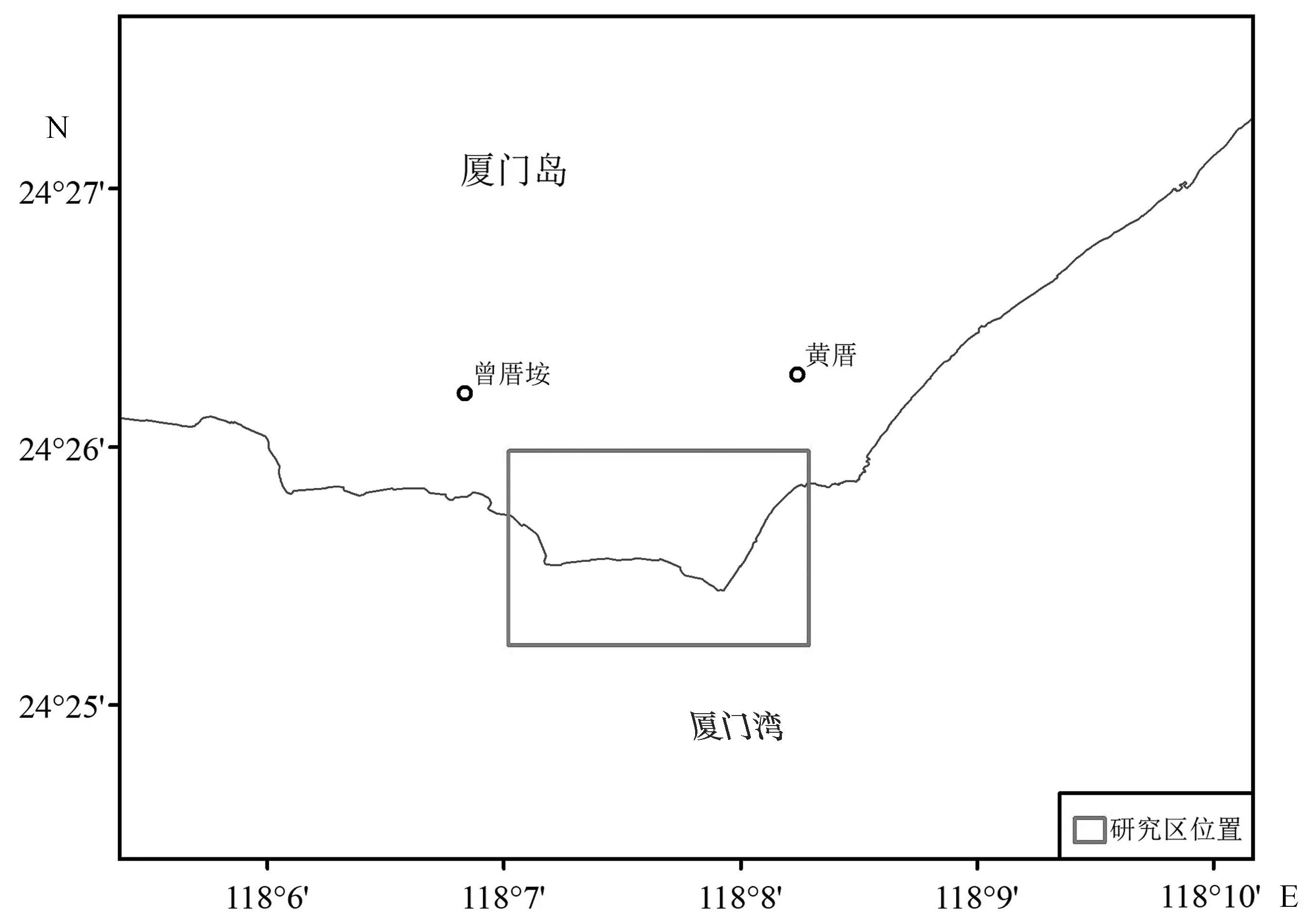
圖1 研究區(qū)地理位置示意圖
研究區(qū)屬于正規(guī)半日潮區(qū),年平均海平面為0.35 m,歷年最高潮位為4.47 m,歷年最低潮位為-3.58 m,多年平均大潮高潮位為3.81 m。多年平均潮差為4.10 m,歷年最大潮差達(dá)到6.92 m,漲潮平均歷時為6 h 9 min,落潮平均歷時為6 h 16 min。
1.2 數(shù)據(jù)獲取與處理
本研究利用GNSS RTK接收機(jī)、無人機(jī)及三維激光掃描儀對研究區(qū)進(jìn)行測量。其中無人機(jī)及三維激光掃描儀進(jìn)行全覆蓋測量,GNSS RTK人工實測5條剖面共40個測點。
1.2.1 GNSS RTK實地測量 GNSS RTK剖面測量采用華星A12型RTK連接福建省連續(xù)運行衛(wèi)星定位導(dǎo)航服務(wù)系統(tǒng)(Continuous Operational Reference System, CORS)。華星A12型RTK的定位精度為水平±(8+1×10-6×D) mm,垂直±(15+1×10-6×D) mm;福建省CORS的精度為水平±20 mm,垂直±50 mm。
在研究區(qū)的兩側(cè)及中間共布設(shè)5個控制點,測量控制點并進(jìn)行點校正。控制點采用CGCS2000坐標(biāo)系,高程系統(tǒng)采用1985國家高程基準(zhǔn)。在采集控制點時將GNSS RTK接收機(jī)架設(shè)在三腳架對中裝置上進(jìn)行平滑采集,平滑次數(shù)設(shè)為10次,求取平均值得到控制點坐標(biāo)。使用對中設(shè)備并進(jìn)行點位平滑處理可盡量減少控制測量誤差,也為無人機(jī)及掃描儀數(shù)據(jù)降低初差,控制點的平面精度誤差為0.02 m,高程精度誤差為0.05 m。
人工測量布設(shè)5條垂直岸線走向的典型剖面,剖面長約40~60 m,相鄰剖面距離在90~160 m之間,每條剖面布置8個測量點,剖面1測量點間距為6 m,其他剖面相鄰測量點間距為8 m。選擇低潮位時段進(jìn)行測量,獲取平面坐標(biāo)及高程數(shù)據(jù)。沙灘剖面人工測量點位置見圖2。

圖2 沙灘剖面人工測量點位置圖
1.2.2 無人機(jī)航測 無人機(jī)低空遙感技術(shù)是近年來在遙感技術(shù)基礎(chǔ)上迅速發(fā)展起來的地理信息數(shù)據(jù)快速獲取技術(shù),該技術(shù)利用無人飛機(jī)平臺搭載航空數(shù)碼相機(jī)進(jìn)行航空攝影,采用慣性測量單元(Inertial Measurement Unit, IMU)/全球定位系統(tǒng)(Global Positioning System, GPS)技術(shù)自動導(dǎo)航,在1 000 m以下進(jìn)行低空作業(yè)[11]。無人機(jī)航測技術(shù)基于多視影像的地表同名點坐標(biāo)實現(xiàn)密集匹配,進(jìn)而快速獲取三維數(shù)據(jù),能有效克服地面建筑和復(fù)雜地形的限制干擾。
無人機(jī)質(zhì)量通常較輕,飛行姿態(tài)一旦受氣流影響,容易產(chǎn)生攝影傾斜,導(dǎo)致像點位移和地形起伏變化產(chǎn)生投影差,直接影響成圖精度[12]。無人機(jī)測量精度的誤差主要與機(jī)載激光測距傳感器姿態(tài)精度、無人機(jī)飛行高度和飛行速度等相關(guān)[13],通過選擇最適合航飛天氣、溫度、云量等環(huán)境條件作業(yè)[14-15],提高采樣頻率、優(yōu)化傳感器姿態(tài)穩(wěn)定精度,可以進(jìn)一步提升測量平面和高程精度,以適應(yīng)精細(xì)地形測量的要求。
本研究采用瑞士EBee-RTK無人機(jī),測量時間為2019年5月18日10點,該時段天氣晴朗無風(fēng),設(shè)計航向重疊度80%,旁向重疊度75%,地面分辨率0.03 cm。設(shè)計工況下,航拍高度為150 m,航拍面積為0.3 km2。航拍過程采用布設(shè)相控點的方式,無需在已知控制點上布設(shè)基站,設(shè)置6個相控點,相控點平面誤差為0.02 m,高程誤差為0.05 m。
完成航拍作業(yè)后,將無人機(jī)外業(yè)航拍照片及飛行姿態(tài)測量系統(tǒng)(Position and Orientation System,POS)數(shù)據(jù)導(dǎo)出,瑞士EBee-RTK無人機(jī)采集的POS數(shù)據(jù)不能自動寫入到照片中,需要手動在后處理軟件PIX4D中進(jìn)行對應(yīng)添加。然后進(jìn)行初步空中三角測量,之后將采集的相控點刺在對應(yīng)的無人機(jī)照片上,反復(fù)進(jìn)行刺點優(yōu)化達(dá)到精度要求后,進(jìn)行PIX4D軟件自動化運算及數(shù)字正射影像(Digital Orthophoto Model, DOM)和數(shù)字高程模型(Digital Elevation Model, DEM)成果輸出,最后將輸出的成果加入EPS三維測圖軟件中進(jìn)行數(shù)據(jù)提取及測繪成果輸出。無人機(jī)航測數(shù)據(jù)處理流程見圖3。
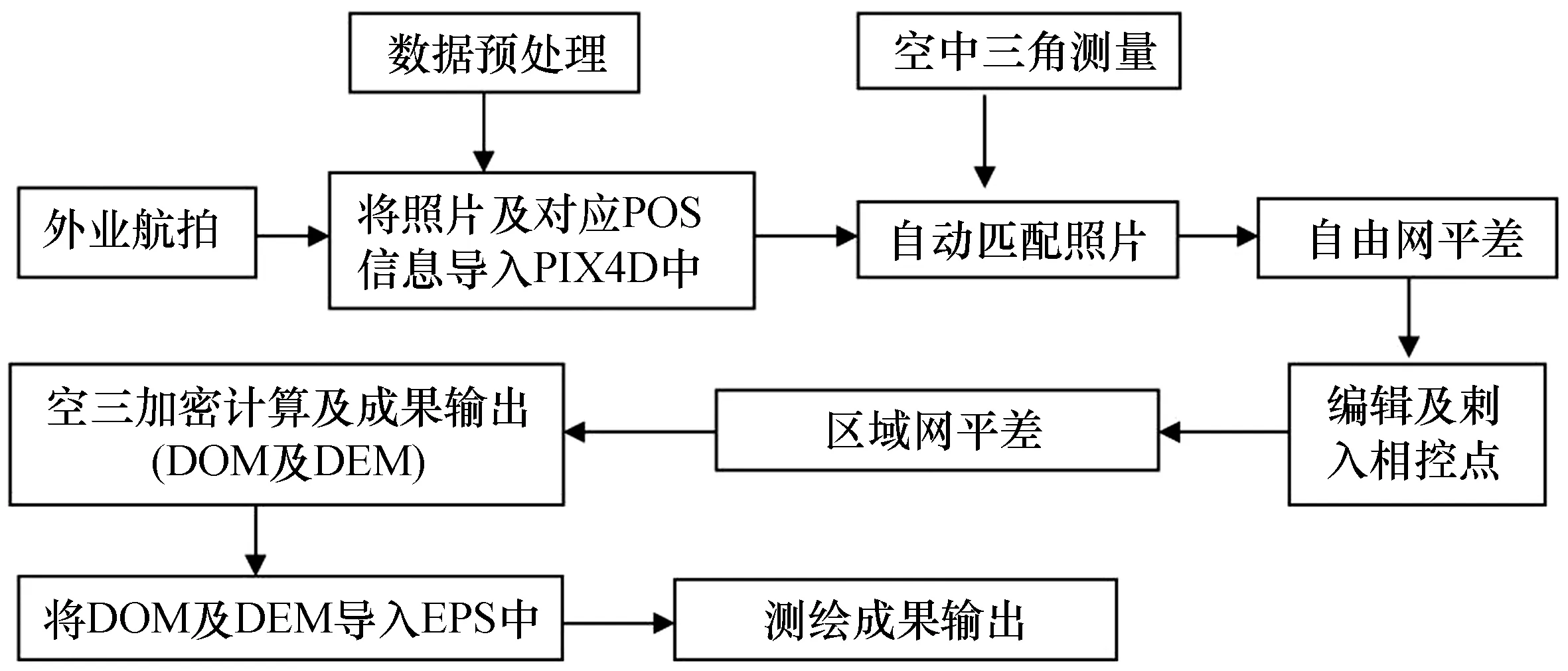
圖3 無人機(jī)數(shù)據(jù)處理流程
1.2.3 三維激光掃描 三維激光掃描技術(shù)是繼GPS空間定位系統(tǒng)之后又一項測繪技術(shù)新突破。它通過高速激光掃描測量的方法,大面積高分辨率地快速獲取被測對象表面的三維坐標(biāo)數(shù)據(jù)。可以快速、大量地采集空間點位信息,為快速建立物體的三維影像模型提供了一種全新的技術(shù)手段。
掃描儀本身含有掃描系統(tǒng)和激光測距系統(tǒng),同時也含有控制和矯正系統(tǒng)及集成電荷耦合器件(Charge Coupled Device, CCD)。儀器工作時,通過測量水平角的反射鏡和測量天頂距的反射鏡一起有序旋轉(zhuǎn),將激光脈沖依次掃過被測量的區(qū)域,測量每個激光脈沖的空間距離及掃描激光脈沖的水平角度和天頂距離,最后通過計算其坐標(biāo)的方法得到被測量區(qū)域的三維坐標(biāo)[16]。
采用FARO Focus3D X330相位掃描儀進(jìn)行測掃作業(yè)。外業(yè)掃描時無需在已知控制點架設(shè)儀器,而是將掃描儀進(jìn)行初步整平,直接架設(shè)在任意位置,在掃描儀兩側(cè)放置6個測量標(biāo)靶,標(biāo)靶距離掃描測站約30 m,每次更換掃描儀位置時標(biāo)靶同步進(jìn)行傳遞,后期通過靶球拼接處理。單次掃描時間為8 min,90%不光滑反射表面上在戶外陰天環(huán)境中掃描距離為0.6~330.0 m,在10、25 m時測距誤差為±2 mm。本次掃描布設(shè)兩條掃描測線將研究區(qū)分為兩部分,掃描間距為60 m,布設(shè)成交叉向前掃描形式。
將掃描儀測掃出來的“fls”格式數(shù)據(jù)導(dǎo)入后處理軟件Trimble RealWorks中,先進(jìn)行噪點剔除,然后使用重疊度算法進(jìn)行自動化拼接。由于FARO Focus3D X330掃描儀采集的點云數(shù)據(jù)只具有相對坐標(biāo),需要手動在后處理軟件中添加布設(shè)的控制點坐標(biāo),整體點云數(shù)據(jù)拼接完成后,使用軟件中的地理坐標(biāo)轉(zhuǎn)換,參照布設(shè)的控制點坐標(biāo),將掃描儀測掃的相對坐標(biāo)轉(zhuǎn)換成CGCS2000坐標(biāo),最后將點云數(shù)據(jù)導(dǎo)入EPS三維測圖軟件中進(jìn)行數(shù)據(jù)提取及測繪成果輸出。掃描儀數(shù)據(jù)處理流程見圖4。
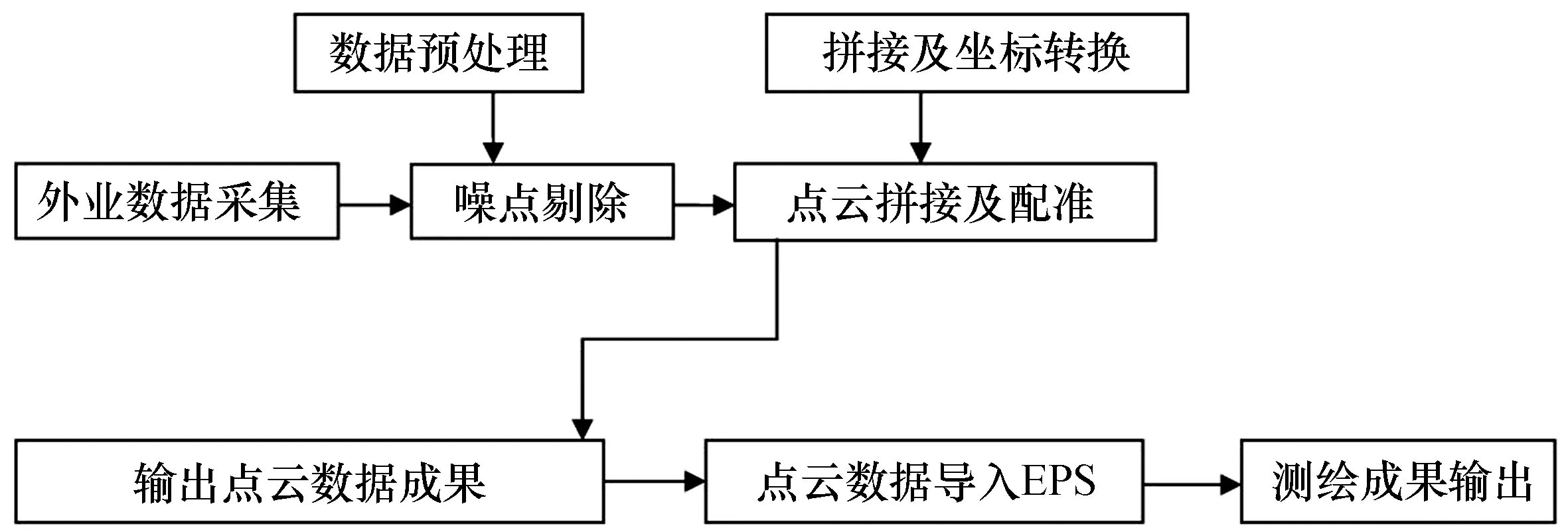
圖4 掃描儀數(shù)據(jù)處理流程
為獲取完整的地形點云數(shù)據(jù),三維激光掃描過程需經(jīng)過多站掃描拼接[17-18],采用RTK進(jìn)行控制測量、布設(shè)并測量標(biāo)靶,精確掃描標(biāo)靶,基于標(biāo)靶進(jìn)行內(nèi)業(yè)測站間拼接和坐標(biāo)轉(zhuǎn)換,從而得到大地坐標(biāo)系下地形的點云數(shù)據(jù),掃描作業(yè)過程較繁瑣。
2 結(jié)果與討論
參考《海洋工程地形測量規(guī)范》相關(guān)規(guī)定,干出灘測量的高程誤差限為0.200 m,平面誤差根據(jù)測量比例尺,中誤差不應(yīng)大于圖上1.000 mm[19]。考慮到實踐中,沙灘剖面地形測量比例尺一般為1∶200,按照1∶200 測量的精度檢驗標(biāo)準(zhǔn),則要求平面定位中誤差不得超過0.200 m。
2.1 航拍及掃描數(shù)據(jù)與實測數(shù)據(jù)比對分析
將無人機(jī)航攝獲取的DOM及DEM成果及三維激光掃描儀獲取的點云成果分別導(dǎo)入EPS軟件中,在EPS中載入人工實測的40個測點坐標(biāo),利用軟件提取功能分別獲取平面位置最接近人工實測點的40個無人機(jī)及三維激光掃描儀成果數(shù)據(jù),與RTK測量點數(shù)據(jù)進(jìn)行對比,對比結(jié)果見表1、表2,各檢查點平面偏差和高程互差離散情況分別見圖5、圖6。

表1 無人機(jī)航拍數(shù)據(jù)與人工實測檢查點水平偏差與高程互差
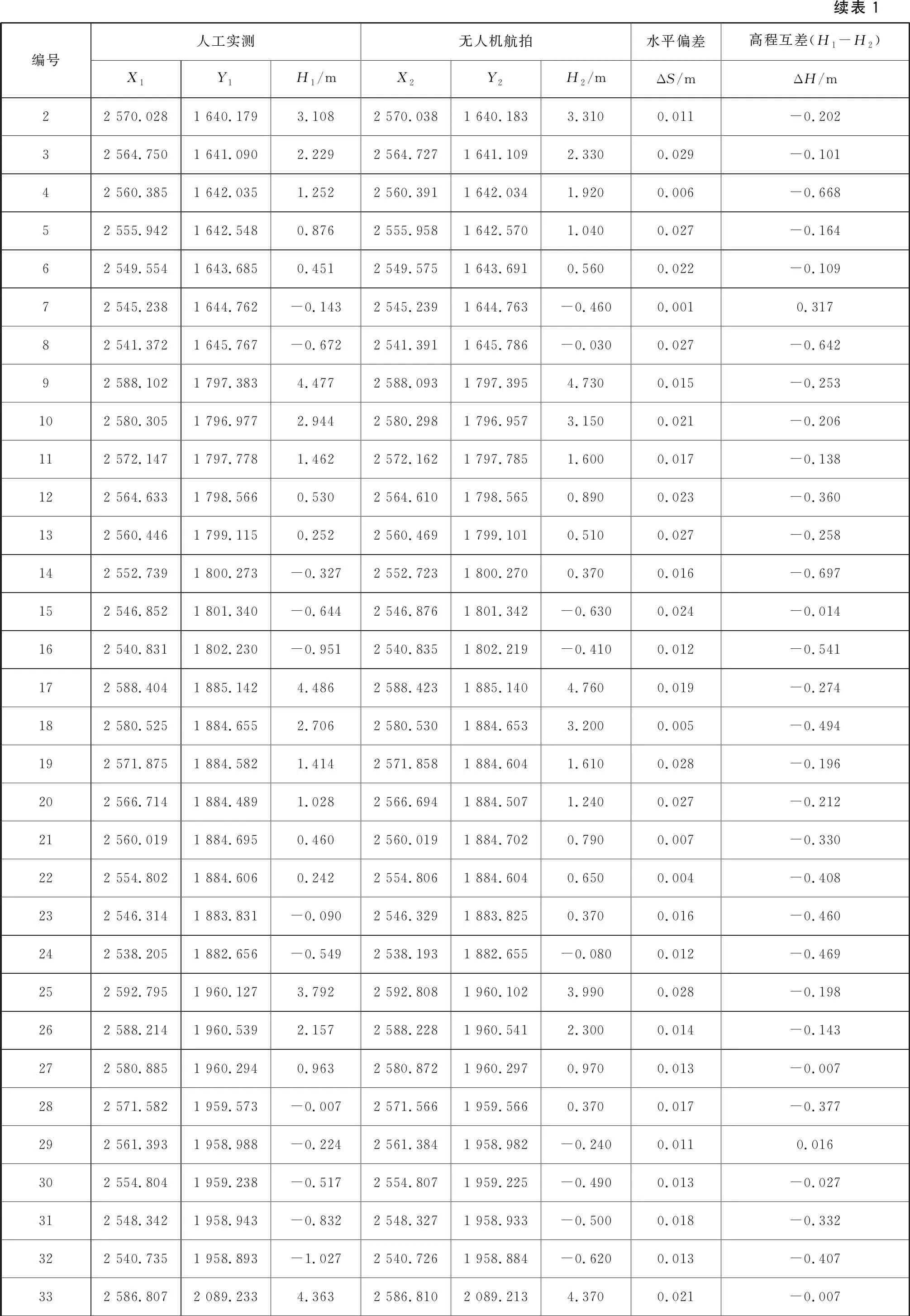
續(xù)表1編號人工實測無人機(jī)航拍水平偏差高程互差(H1-H2)X1Y1H1/mX2Y2H2/mΔS/mΔH/m22 570.0281 640.1793.1082 570.0381 640.1833.3100.011 -0.20232 564.7501 641.0902.2292 564.7271 641.1092.3300.029 -0.10142 560.3851 642.0351.2522 560.3911 642.0341.9200.006 -0.66852 555.9421 642.5480.8762 555.9581 642.5701.0400.027 -0.16462 549.5541 643.6850.4512 549.5751 643.6910.5600.022 -0.10972 545.2381 644.762-0.1432 545.2391 644.763-0.4600.001 0.31782 541.3721 645.767-0.6722 541.3911 645.786-0.0300.027 -0.64292 588.1021 797.3834.4772 588.0931 797.3954.7300.015 -0.253102 580.3051 796.9772.9442 580.2981 796.9573.1500.021 -0.206112 572.1471 797.7781.4622 572.1621 797.7851.6000.017 -0.138122 564.6331 798.5660.5302 564.6101 798.5650.8900.023 -0.360132 560.4461 799.1150.2522 560.4691 799.1010.5100.027 -0.258142 552.7391 800.273-0.3272 552.7231 800.2700.3700.016 -0.697152 546.8521 801.340-0.6442 546.8761 801.342-0.6300.024 -0.014162 540.8311 802.230-0.9512 540.8351 802.219-0.4100.012 -0.541172 588.4041 885.1424.4862 588.4231 885.1404.7600.019 -0.274182 580.5251 884.6552.7062 580.5301 884.6533.2000.005 -0.494192 571.8751 884.5821.4142 571.8581 884.6041.6100.028 -0.196202 566.7141 884.4891.0282 566.6941 884.5071.2400.027 -0.212212 560.0191 884.6950.4602 560.0191 884.7020.7900.007 -0.330222 554.8021 884.6060.2422 554.8061 884.6040.6500.004 -0.408232 546.3141 883.831-0.0902 546.3291 883.8250.3700.016 -0.460242 538.2051 882.656-0.5492 538.1931 882.655-0.0800.012 -0.469252 592.7951 960.1273.7922 592.8081 960.1023.9900.028 -0.198262 588.2141 960.5392.1572 588.2281 960.5412.3000.014 -0.143272 580.8851 960.2940.9632 580.8721 960.2970.9700.013 -0.007282 571.5821 959.573-0.0072 571.5661 959.5660.3700.017 -0.377292 561.3931 958.988-0.2242 561.3841 958.982-0.2400.011 0.016302 554.8041 959.238-0.5172 554.8071 959.225-0.4900.013 -0.027312 548.3421 958.943-0.8322 548.3271 958.933-0.5000.018 -0.332322 540.7351 958.893-1.0272 540.7261 958.884-0.6200.013 -0.407332 586.8072 089.2334.3632 586.8102 089.2134.3700.021 -0.007
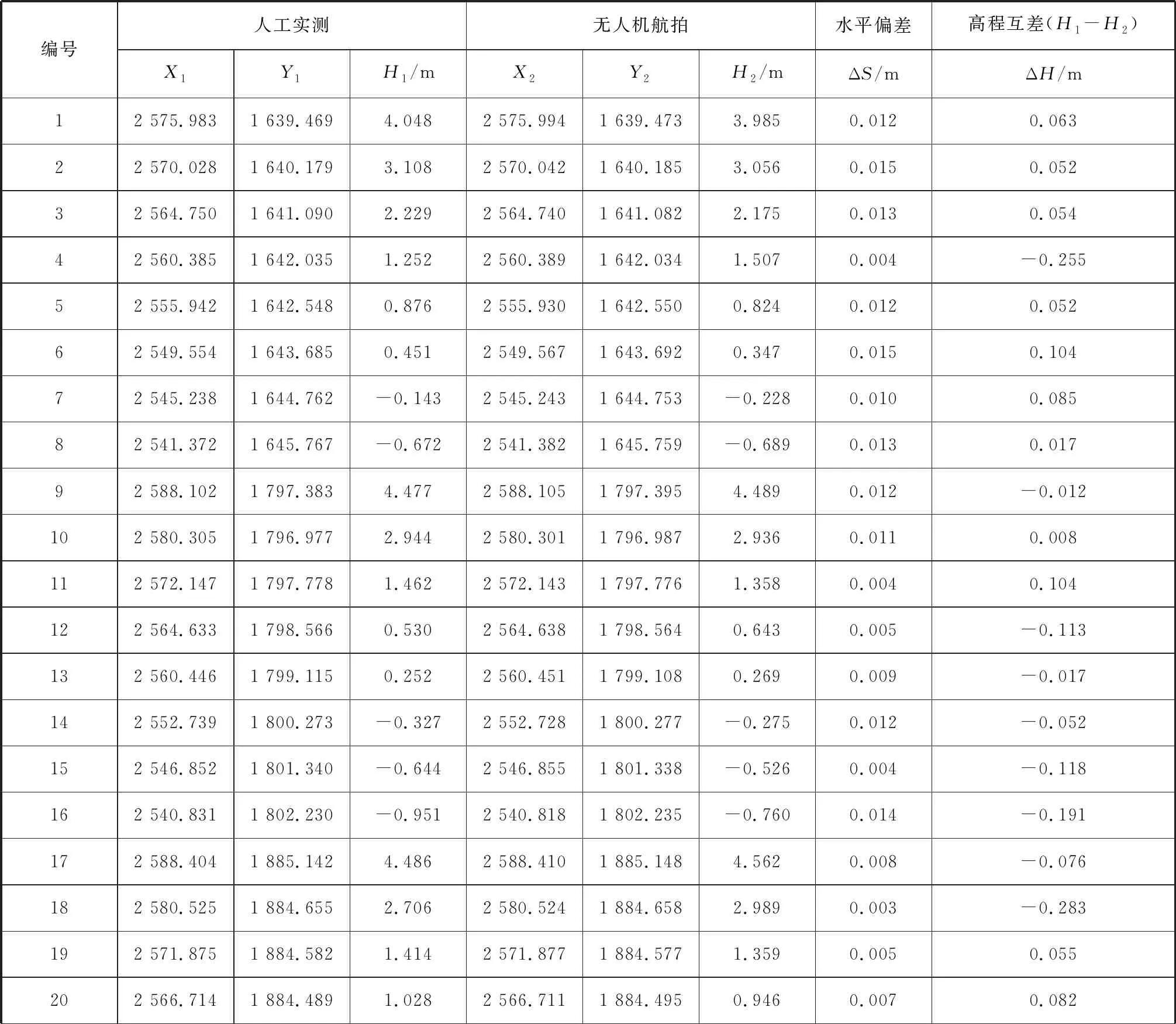
表2 三維激光掃描儀與人工實測檢查點水平偏差與高程互差
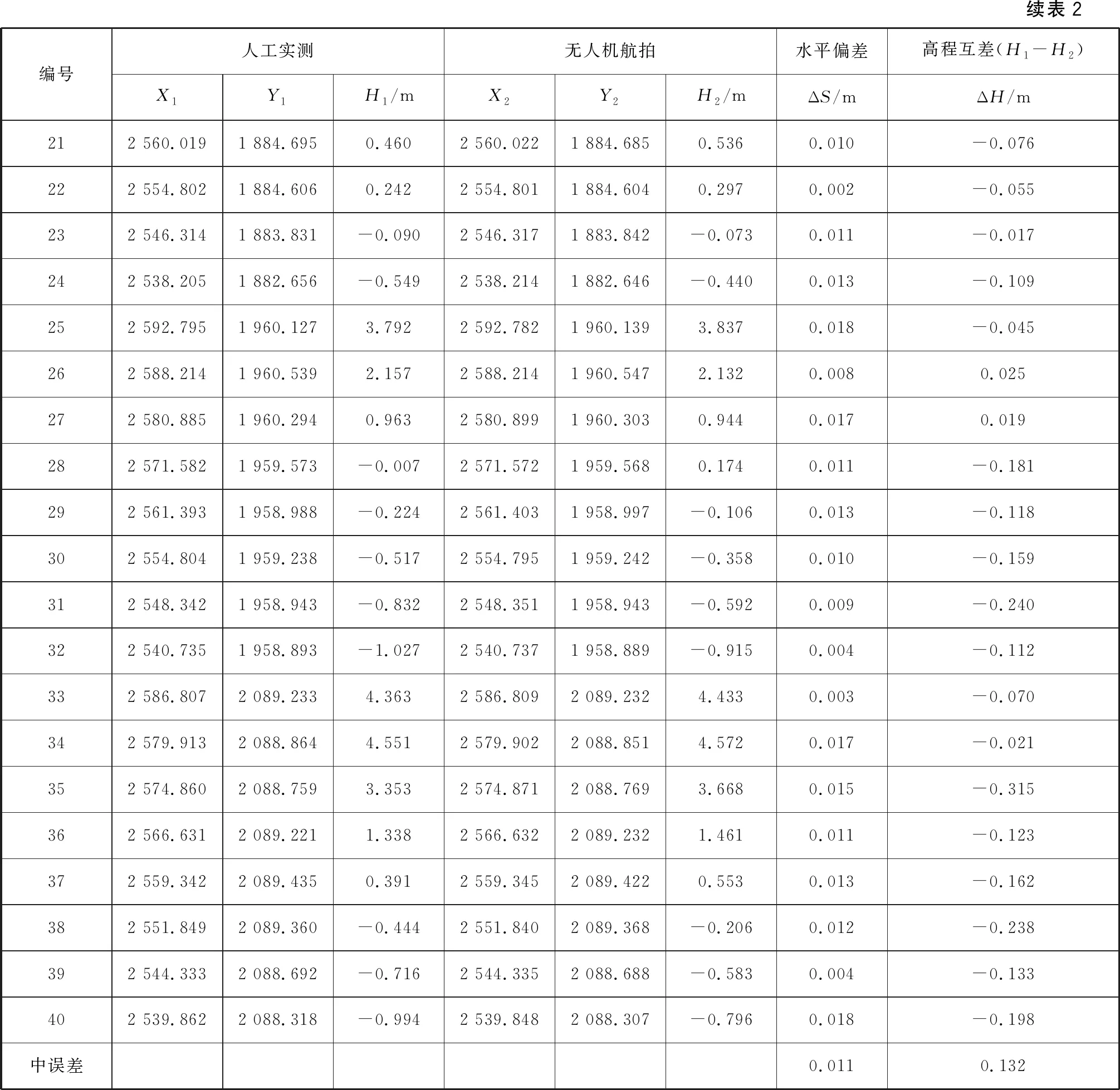
續(xù)表2編號人工實測無人機(jī)航拍水平偏差高程互差(H1-H2)X1Y1H1/mX2Y2H2/mΔS/mΔH/m212 560.0191 884.6950.4602 560.0221 884.6850.5360.010-0.076222 554.8021 884.6060.2422 554.8011 884.6040.2970.002-0.055232 546.3141 883.831-0.0902 546.3171 883.842-0.0730.011-0.017242 538.2051 882.656-0.5492 538.2141 882.646-0.4400.013-0.109252 592.7951 960.1273.7922 592.7821 960.1393.8370.018-0.045262 588.2141 960.5392.1572 588.2141 960.5472.1320.0080.025272 580.8851 960.2940.9632 580.8991 960.3030.9440.0170.019282 571.5821 959.573-0.0072 571.5721 959.5680.1740.011-0.181292 561.3931 958.988-0.2242 561.4031 958.997-0.1060.013-0.118302 554.8041 959.238-0.5172 554.7951 959.242-0.3580.010-0.159312 548.3421 958.943-0.8322 548.3511 958.943-0.5920.009-0.240322 540.7351 958.893-1.0272 540.7371 958.889-0.9150.004-0.112332 586.8072 089.2334.3632 586.8092 089.2324.4330.003-0.070342 579.9132 088.8644.5512 579.9022 088.8514.5720.017-0.021352 574.8602 088.7593.3532 574.8712 088.7693.6680.015-0.315362 566.6312 089.2211.3382 566.6322 089.2321.4610.011-0.123372 559.3422 089.4350.3912 559.3452 089.4220.5530.013-0.162382 551.8492 089.360-0.4442 551.8402 089.368-0.2060.012-0.238392 544.3332 088.692-0.7162 544.3352 088.688-0.5830.004-0.133402 539.8622 088.318-0.9942 539.8482 088.307-0.7960.018-0.198中誤差0.0110.132
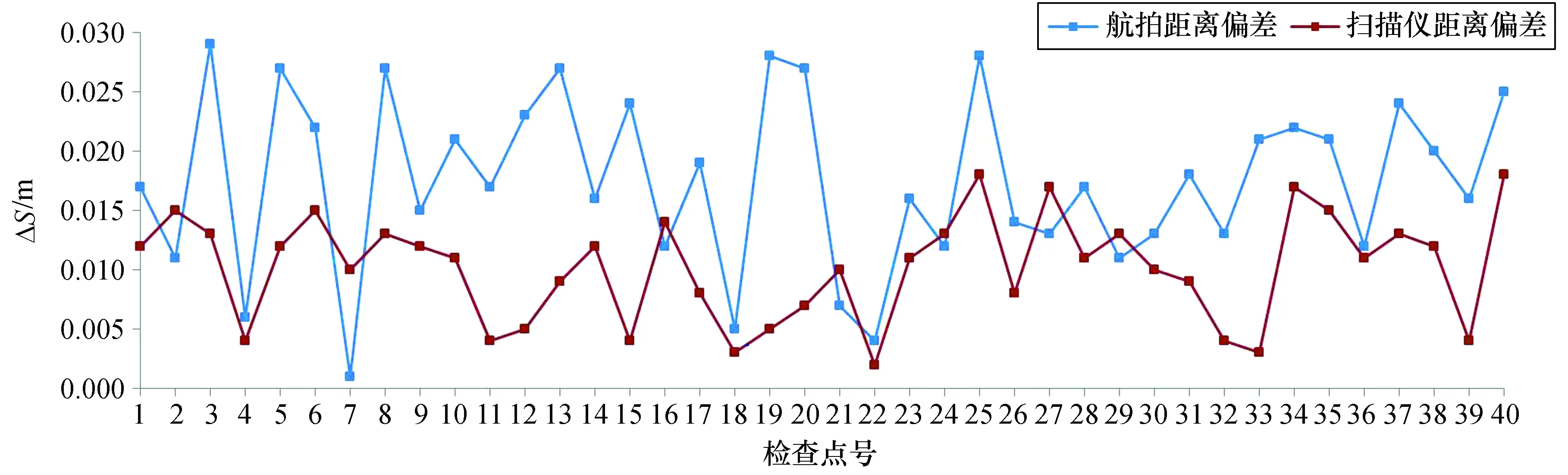
圖5 各檢查點平面距離偏差離散圖
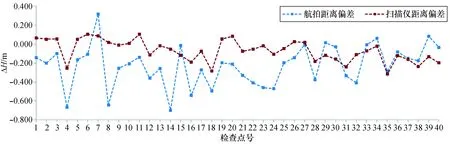
圖6 各檢查點高程互差離散圖
將無人機(jī)航拍DOM數(shù)據(jù)與5條剖面40個檢查點的實測數(shù)據(jù)進(jìn)行對比,結(jié)果顯示,平面坐標(biāo)偏差均較小,平面位置誤差在0.001~0.029 m之間,中誤差為0.019 m,平面精度滿足1∶200比例尺的沙灘剖面地形測量精度的要求。無人機(jī)航拍DEM數(shù)據(jù)高程誤差在-0.697~0.086 m之間,中誤差為0.313 m,誤差落在±0.200 m范圍內(nèi)的有20個,占比為50%;90%的對比點中,無人機(jī)航拍獲取的高程值大于人工測量高程,高程互差體現(xiàn)為負(fù)值。
三維激光掃描儀數(shù)據(jù)與5條剖面40個檢查點的實測數(shù)據(jù)對比結(jié)果顯示,平面位置誤差在0.002~0.018 m之間,中誤差為0.011 m,均小于0.200 m。高程誤差在-0.315~0.014 m之間,中誤差為0.132 m,高程誤差落在±0.200 m范圍內(nèi)的有35個,占比為87.5%;67.5%的對比點中,掃描儀獲取的高程值大于人工測量高程,高程互差體現(xiàn)為負(fù)值。
總體而言,本研究中,利用無人機(jī)測繪技術(shù)和三維激光掃描儀技術(shù)分別獲取的DOM數(shù)據(jù)具有較高的精度,中誤差均控制在0.020 m以內(nèi),滿足1∶200比例尺的沙灘剖面地形測量精度要求(中誤差限0.200 m)。在高程數(shù)據(jù)獲取方面,三維激光掃描儀獲取的高程數(shù)據(jù)中誤差控制在0.200 m以內(nèi),滿足《海洋工程地形測量規(guī)范》中規(guī)定的高程精度要求(中誤差限0.200 m),但無人機(jī)的精度較三維激光掃描儀差,無法滿足該要求。
2.2 測量剖面分析
本研究利用人工測量、無人機(jī)技術(shù)和激光掃描儀技術(shù)所獲取的測量數(shù)據(jù),分別繪制沙灘典型剖面圖(圖7)。可以看出,利用激光掃描儀獲取的剖面形態(tài)與人工測量剖面的基本重合,整體偏差較小。利用無人機(jī)航拍獲取的剖面曲線整體位于人工測量剖面上方,可見無人機(jī)測量高程普遍大于人工測量高程。無人機(jī)與人工測量剖面高程互差最大值為0.697 m,掃描儀與人工測量的高程互差最大值為0.315 m。相對而言,在近岸15 m左右的研究區(qū)內(nèi),3種方法所獲取的測量數(shù)據(jù)契合度較好,離岸區(qū)無人機(jī)測量數(shù)據(jù)的高程偏差較大。
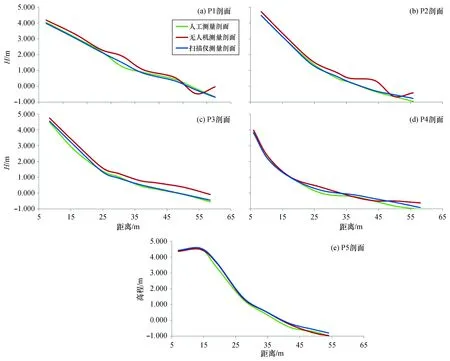
圖7 無人機(jī)測量、激光掃描與人工測量方法的沙灘剖面對比
2.3 討論
本研究采用無人機(jī)航拍和三維激光掃描技術(shù),對天泉灣沙灘進(jìn)行剖面測量,得到測區(qū)DOM及高程數(shù)據(jù),并以常規(guī)人工測量的方式,進(jìn)行作業(yè)成果的檢核。
實踐表明,三維激光掃描儀獲取的DOM數(shù)據(jù)可以滿足1∶200比例尺地形測量平面精度要求,高程數(shù)據(jù)也滿足《海洋工程地形測量規(guī)范》規(guī)定的高程精度要求(中誤差限0.200 m),在沙灘剖面地形監(jiān)測業(yè)務(wù)化生產(chǎn)作業(yè)中具有良好的應(yīng)用空間。無人機(jī)航攝獲取的平面位置數(shù)據(jù)精度也能夠達(dá)到1∶200比例尺的地形測量精度要求,但高程數(shù)據(jù)誤差在-0.697~0.086 m之間,中誤差為0.313 m,無法滿足《海洋工程地形測量規(guī)范》要求。
3 結(jié)論
利用無人機(jī)航拍及三維激光掃描儀技術(shù),開展沙灘剖面測量,對測量區(qū)域?qū)崿F(xiàn)全面覆蓋,具有傳統(tǒng)人工實測方法所不能比擬的優(yōu)勢。應(yīng)用結(jié)果表明,在沙灘地形剖面監(jiān)測方面,三維激光掃描技術(shù)精度較高,但地面三維掃描影像制作難度大,測量掃描過程較繁瑣,易受視場角限制,結(jié)果存在掃描噪點和盲區(qū)。無人機(jī)航拍操作簡便,可以快速獲取測區(qū)影像,相對三維激光掃描儀,不存在盲區(qū),且點云處理也簡單快捷,但其高程數(shù)據(jù)測量精度有待提高。
在實踐中,可以通過無人機(jī)航攝得到的數(shù)據(jù)進(jìn)行內(nèi)插,補充三維激光掃描數(shù)據(jù)存在的盲區(qū)或漏洞[20];也可以在激光掃描儀進(jìn)行點云數(shù)據(jù)采集時,同軸同步采用RTK測量掃描站的站點坐標(biāo),采用地物點粗拼接與基于平面的ICP精確配準(zhǔn)的兩級拼接策略;采用測塊四角或周邊RTK點進(jìn)行點云整體坐標(biāo)轉(zhuǎn)換,簡化激光掃描儀操作流程[18]。通過結(jié)合人工測量、無人機(jī)攝影及三維激光掃描技術(shù)各自的優(yōu)勢,將沙灘的所有實景信息復(fù)制到計算機(jī)上,提高野外測量效率,實現(xiàn)沙灘監(jiān)測的高效性、準(zhǔn)確性和全面性,為沙灘整治修復(fù)決策提供數(shù)據(jù)支持。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
